Você também pode gostar
- UKP6053 - L8 Multiple RegressionDocumento105 páginasUKP6053 - L8 Multiple RegressionFiq Razali100% (2)
- Duality in LPPDocumento19 páginasDuality in LPPURhythm Uppal100% (1)
- Data Analysis Using SPSS: Research Workshop SeriesDocumento86 páginasData Analysis Using SPSS: Research Workshop SeriesMuhammad Asad AliAinda não há avaliações
- Eigen FilteringDocumento6 páginasEigen Filteringlakshmipriya94Ainda não há avaliações
- Applications of DerivativesDocumento33 páginasApplications of DerivativesRiddhima MukherjeeAinda não há avaliações
- Activity Sheet Q1 Math 9 LC13Documento11 páginasActivity Sheet Q1 Math 9 LC13MATHUTOAinda não há avaliações
- Class 12th - Relations and FunctionsDocumento33 páginasClass 12th - Relations and FunctionsessenzzoAinda não há avaliações
- Functions of ManagementDocumento11 páginasFunctions of ManagementMark Adrian Jintalan ManzanoAinda não há avaliações
- Thesis Paulo LyraDocumento376 páginasThesis Paulo LyraGusgaraAinda não há avaliações
- Digital RootsDocumento6 páginasDigital Rootsthamizt100% (1)
- Application of Eigen Value N Eigen VectorDocumento15 páginasApplication of Eigen Value N Eigen VectorAman KheraAinda não há avaliações
- Neo Classical Theory of ManagementDocumento3 páginasNeo Classical Theory of ManagementwaleedjuttAinda não há avaliações
- Role of Stress Management For Teachers ADocumento4 páginasRole of Stress Management For Teachers ARean Perez BucoyAinda não há avaliações
- Application of Eigenvalues and Eigenvectors.Documento10 páginasApplication of Eigenvalues and Eigenvectors.Harish BAinda não há avaliações
- Project MphilDocumento64 páginasProject Mphilrameshmaths_aplAinda não há avaliações
- Lab 04 Eigen Value Partial Pivoting and Elimination PDFDocumento12 páginasLab 04 Eigen Value Partial Pivoting and Elimination PDFUmair Ali ShahAinda não há avaliações
- Tutorial Letter 101/0/2017: ForecastingDocumento10 páginasTutorial Letter 101/0/2017: ForecastingMzukisi100% (1)
- Unit 12 PDFDocumento38 páginasUnit 12 PDFbvs957946Ainda não há avaliações
- ProjectDocumento39 páginasProjectJeo C AuguinAinda não há avaliações
- Relationship Between Average and Marginal Revenue Curves - 3 (B)Documento6 páginasRelationship Between Average and Marginal Revenue Curves - 3 (B)Amit KapoorAinda não há avaliações
- Game TheoryDocumento20 páginasGame TheoryNayak Grocery StoresAinda não há avaliações
- StatisticsDocumento14 páginasStatisticsAkash DeepAinda não há avaliações
- Math Project: Karnataka Law Society's Gogte Institute of Technology, BelgaumDocumento13 páginasMath Project: Karnataka Law Society's Gogte Institute of Technology, BelgaumVaishnavi B HAinda não há avaliações
- Assignment On Correlation Analysis Name: Md. Arafat RahmanDocumento6 páginasAssignment On Correlation Analysis Name: Md. Arafat RahmanArafat RahmanAinda não há avaliações
- On The Centroids of Fuzzy NumberDocumento8 páginasOn The Centroids of Fuzzy NumberOcta_BunAinda não há avaliações
- Game TheoryDocumento15 páginasGame Theorydhaval upadhyayAinda não há avaliações
- Prabhu-Fuzzy Hungarian Method For Solving Assignment Problem Involving Trapezoidal Fuzzy NumbersDocumento8 páginasPrabhu-Fuzzy Hungarian Method For Solving Assignment Problem Involving Trapezoidal Fuzzy NumbersGanesan KandasamyAinda não há avaliações
- DifferentationDocumento39 páginasDifferentationCHUKWUEBUKA NWODOAinda não há avaliações
- What Are The Important Properties of Indifference Curves?Documento4 páginasWhat Are The Important Properties of Indifference Curves?Khalil AhmedAinda não há avaliações
- Application of Differential EquationDocumento42 páginasApplication of Differential EquationabhishekAinda não há avaliações
- Unit 5 Assignment Problems: StructureDocumento34 páginasUnit 5 Assignment Problems: StructureAnkit KashyapAinda não há avaliações
- Inequalities and Limit TheoremsDocumento18 páginasInequalities and Limit TheoremsTanisha Grover100% (1)
- Design Elements To Create Mood and Impression - Colour, Angle, Motion, SimplicityDocumento10 páginasDesign Elements To Create Mood and Impression - Colour, Angle, Motion, SimplicitySpectre SakthivelAinda não há avaliações
- Unit 9 Linear Regression: StructureDocumento18 páginasUnit 9 Linear Regression: StructurePranav ViswanathanAinda não há avaliações
- Monte CarloDocumento14 páginasMonte CarlohltanAinda não há avaliações
- Matrices and Determinants ProjectDocumento5 páginasMatrices and Determinants ProjectkunjapAinda não há avaliações
- Linear Algebra Project Merged MergedDocumento18 páginasLinear Algebra Project Merged MergedMahi KhurramAinda não há avaliações
- Complex AnalysisDocumento180 páginasComplex AnalysisvrsafeAinda não há avaliações
- Cluster AnalysisDocumento4 páginasCluster Analysissuhail memon100% (1)
- Partial Differential Equations For Engin PDFDocumento141 páginasPartial Differential Equations For Engin PDFمصطفى العباديAinda não há avaliações
- Practical Exercise 8 - SolutionDocumento3 páginasPractical Exercise 8 - SolutionmidoriAinda não há avaliações
- Statistics - Index NumberDocumento47 páginasStatistics - Index NumberRuth Cadet100% (1)
- How To Create The Pivot TableDocumento8 páginasHow To Create The Pivot TableMehta PriyankaAinda não há avaliações
- Research Paper On LeadershipDocumento18 páginasResearch Paper On LeadershipAmit SoniAinda não há avaliações
- K-Means Clustering AlgorithmDocumento13 páginasK-Means Clustering AlgorithmTabasumAinda não há avaliações
- Type I and Type II ErrorsDocumento8 páginasType I and Type II ErrorsL'Homme Révolté100% (1)
- Course End Survey - PsocDocumento3 páginasCourse End Survey - Psochareesh.makesuAinda não há avaliações
- Eigenvalues and EigenvectorsDocumento24 páginasEigenvalues and EigenvectorswkpfckgwAinda não há avaliações
- Venn Diagrams: Database PrinciplesDocumento13 páginasVenn Diagrams: Database PrincipleslucdahAinda não há avaliações
- Mean Deviation: (For M.B.A. I Semester)Documento20 páginasMean Deviation: (For M.B.A. I Semester)Arun MishraAinda não há avaliações
- Applications of Suffix TreesDocumento40 páginasApplications of Suffix TreesYogendra UikeyAinda não há avaliações
- Mini Project Measures of DispersionDocumento13 páginasMini Project Measures of DispersionSANGARA NANDA A/L KARRUPPIAH MoeAinda não há avaliações
- Lecture Dual Simplex MethodDocumento12 páginasLecture Dual Simplex MethodRobinson MojicaAinda não há avaliações
- Graph Theory 1Documento38 páginasGraph Theory 1smusala7970100% (2)
- Unit-3 IGNOU STATISTICSDocumento13 páginasUnit-3 IGNOU STATISTICSCarbideman100% (1)
- Primary and Secondary DataDocumento16 páginasPrimary and Secondary DataAkash Mangotra100% (1)
- The Economic Theory of Vocational EducationDocumento6 páginasThe Economic Theory of Vocational Educationkatonyo100% (1)
- Maths Mphil Project - CompressDocumento80 páginasMaths Mphil Project - CompressJanet RoyAinda não há avaliações
- Measures of DispersionDocumento26 páginasMeasures of DispersionAshish Sen GuptaAinda não há avaliações
- ARCH ModelDocumento26 páginasARCH ModelAnish S.MenonAinda não há avaliações
- Matrices: Numerical Solutions For Civil Engineers 2020Documento25 páginasMatrices: Numerical Solutions For Civil Engineers 2020Kristin Brienne Leander-RenomeronAinda não há avaliações
- Linear Programming IDocumento23 páginasLinear Programming IAlain BernabeAinda não há avaliações
- 4047 - Y20 - Sy A MathDocumento12 páginas4047 - Y20 - Sy A Mathkll93Ainda não há avaliações
- 2.5 FINAL REVIEW ASSIGNMENT Quadratic Functions and EquationsDocumento5 páginas2.5 FINAL REVIEW ASSIGNMENT Quadratic Functions and EquationsJana KatochAinda não há avaliações
- Continued Fractions: and The Man Who Knew InfinityDocumento25 páginasContinued Fractions: and The Man Who Knew InfinityPippo MiriAinda não há avaliações
- Naming Polynomials PDFDocumento4 páginasNaming Polynomials PDFroselyn panganibanAinda não há avaliações
- Carleton University: Final Examination Fall 2010Documento10 páginasCarleton University: Final Examination Fall 2010examkillerAinda não há avaliações
- Revised Syllabus Course Title: Applied Mathematics (Code-241) Grade XI-XII 2020-21Documento10 páginasRevised Syllabus Course Title: Applied Mathematics (Code-241) Grade XI-XII 2020-21Kheman MittalAinda não há avaliações
- Cad Cam 30 - 03 - 2021Documento14 páginasCad Cam 30 - 03 - 2021Bharat GavaliAinda não há avaliações
- Inner: 1 Inner The For y The WeDocumento18 páginasInner: 1 Inner The For y The WeTrung Kien PhamAinda não há avaliações
- ML:Introduction: Week 1 Lecture NotesDocumento8 páginasML:Introduction: Week 1 Lecture NotesAmanda GarciaAinda não há avaliações
- Binomial Theorem: Full Marks 50 Choose The Correct Option Q1. (A) - . (B) - . (C) - . Q2. Q3Documento1 páginaBinomial Theorem: Full Marks 50 Choose The Correct Option Q1. (A) - . (B) - . (C) - . Q2. Q3CHP TSTPSAinda não há avaliações
- Tangential and Normal Components of Acceleration - Suggested Problems - SolutionsDocumento7 páginasTangential and Normal Components of Acceleration - Suggested Problems - SolutionsJessa Mae EdmaAinda não há avaliações
- Guc 2 61 38781 2023-11-25T16 29 04Documento3 páginasGuc 2 61 38781 2023-11-25T16 29 04joeplays451Ainda não há avaliações
- 4.2D Solve Double Inequalities and Represent Solutions Using Set Notation + SPARX NHADocumento23 páginas4.2D Solve Double Inequalities and Represent Solutions Using Set Notation + SPARX NHAalpha.barryAinda não há avaliações
- Errata For Enumerative Combinatorics, Vol. 1, 2nd Ed., 2012Documento11 páginasErrata For Enumerative Combinatorics, Vol. 1, 2nd Ed., 2012mehow94461Ainda não há avaliações
- Masterdoc Emf GVP OptDocumento287 páginasMasterdoc Emf GVP OptPaola GongoraAinda não há avaliações
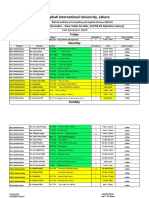
- Riphah International University, Lahore: Deparetment of Mathematics - Time Table For MSC, M.Phil, PH.D (Online Classes)Documento2 páginasRiphah International University, Lahore: Deparetment of Mathematics - Time Table For MSC, M.Phil, PH.D (Online Classes)Anam BilqeesAinda não há avaliações
- VECTORDocumento38 páginasVECTORnithin_v90Ainda não há avaliações
- Universe: Real Clifford Algebras and Their Spinors For Relativistic FermionsDocumento34 páginasUniverse: Real Clifford Algebras and Their Spinors For Relativistic FermionsfasdfasdfAinda não há avaliações
- Guideline For Practical (March April 2020) 28-01-2020Documento122 páginasGuideline For Practical (March April 2020) 28-01-2020Ravikumar BalasubramanianAinda não há avaliações
- January 2017 (IAL) MS - C12 EdexcelDocumento32 páginasJanuary 2017 (IAL) MS - C12 EdexcelNewton JohnAinda não há avaliações
- 2023 All Basic Cbse Question PapersDocumento88 páginas2023 All Basic Cbse Question Papersshouryavardhan2008Ainda não há avaliações
- Mws Gen Inp TXT SplineDocumento12 páginasMws Gen Inp TXT SplineApuu Na Juak EhAinda não há avaliações
- Proving InequalitiesDocumento4 páginasProving InequalitieskukumaluXDAinda não há avaliações
- Name - Mehak Chugh: PPT On Linear Equation in Two VariableDocumento19 páginasName - Mehak Chugh: PPT On Linear Equation in Two VariablePreeti Vijay ManchandaAinda não há avaliações
- Lecture Week 13a (Supplementary) : - Constrained OptimisationDocumento27 páginasLecture Week 13a (Supplementary) : - Constrained OptimisationdanAinda não há avaliações
- Physics 106: Mechanics: Wenda CaoDocumento26 páginasPhysics 106: Mechanics: Wenda Caosaeed al-zahraniAinda não há avaliações
- Math 9 Q1 Week 1Documento10 páginasMath 9 Q1 Week 1GraceRasdasAinda não há avaliações