Você também pode gostar
- Controle LED Botão ArduinoDocumento7 páginasControle LED Botão ArduinoGabriel GustavoAinda não há avaliações
- MW Ebook AcoesDocumento51 páginasMW Ebook AcoesAndré CostaAinda não há avaliações
- HermenêuticaDocumento17 páginasHermenêuticaAndré CostaAinda não há avaliações
- NF-162669 The ButtonDocumento1 páginaNF-162669 The ButtonAndré CostaAinda não há avaliações
- Modulacao AM-DSB-SC PDFDocumento15 páginasModulacao AM-DSB-SC PDFBreno Oliveira UTAinda não há avaliações
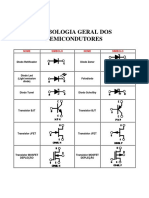
- Simbologia Geral Dos Semicondutores Páginas 1 2Documento2 páginasSimbologia Geral Dos Semicondutores Páginas 1 2André CostaAinda não há avaliações
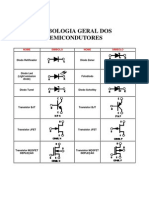
- Simbologia Geral Dos Semicondutores Páginas 1 2Documento2 páginasSimbologia Geral Dos Semicondutores Páginas 1 2André CostaAinda não há avaliações
- NF-162669 The ButtonDocumento1 páginaNF-162669 The ButtonAndré CostaAinda não há avaliações
- Projeto Integrador - Nervo Teste - 2018-2Documento6 páginasProjeto Integrador - Nervo Teste - 2018-2André CostaAinda não há avaliações
- (E-BOOK) Guia - Automação Residencial e Construtoras - WOWDocumento26 páginas(E-BOOK) Guia - Automação Residencial e Construtoras - WOWAndré CostaAinda não há avaliações
- Modulacao AM-DSB-SC PDFDocumento15 páginasModulacao AM-DSB-SC PDFBreno Oliveira UTAinda não há avaliações
- Apostila+A Udio+e+acu SticaDocumento71 páginasApostila+A Udio+e+acu SticaAndré CostaAinda não há avaliações
- Simbolos SemicondutoresDocumento9 páginasSimbolos SemicondutoresFábio RibeiroAinda não há avaliações
- Estudos Da Critica Textual Do Novo TestamentoDocumento98 páginasEstudos Da Critica Textual Do Novo TestamentoAndré Costa100% (1)
- O Seculo II e o Canone Do Novo TestamentoDocumento22 páginasO Seculo II e o Canone Do Novo TestamentoAndré CostaAinda não há avaliações
- O desmioladoDocumento132 páginasO desmioladoCelso100% (1)
- Teses 5 Congresso PT FinalDocumento165 páginasTeses 5 Congresso PT FinalAugustoCesarRibeiroVieiraAinda não há avaliações
- Biografia de Luigi Francescon Um Dos Pioneiros Do Pentecostalismo No Brasil 1 PDFDocumento74 páginasBiografia de Luigi Francescon Um Dos Pioneiros Do Pentecostalismo No Brasil 1 PDFDaniel Siqueira BarãoAinda não há avaliações
- Decodifição Da BHS Critica Textual Do PentateucoDocumento8 páginasDecodifição Da BHS Critica Textual Do PentateucoAndré Costa0% (1)
- Apostila de DevDocumento74 páginasApostila de DevWeliton V. BorgesAinda não há avaliações
- Como montar uma loja de animaisDocumento32 páginasComo montar uma loja de animaisSérgio PereiraAinda não há avaliações
- A Sinagoga de Satanás - A Linhagem Dos RothschildDocumento43 páginasA Sinagoga de Satanás - A Linhagem Dos Rothschildgoldtrade86% (43)
- Manual de Critica TextualDocumento69 páginasManual de Critica TextualAndré CostaAinda não há avaliações
- A Religião ProibidaDocumento62 páginasA Religião ProibidaRobert Shankar100% (3)
- Como montar uma loja de animaisDocumento32 páginasComo montar uma loja de animaisSérgio PereiraAinda não há avaliações
- Automação Intro Cap1Documento12 páginasAutomação Intro Cap1André CostaAinda não há avaliações
- Apostila de Sociologia - Instituições SociaisDocumento147 páginasApostila de Sociologia - Instituições SociaisDaniel LuizAinda não há avaliações
- Aplicando vetores na resolução de problemas geométricosDocumento80 páginasAplicando vetores na resolução de problemas geométricosLindberg BarbosaAinda não há avaliações
- Casa Container TCCDocumento16 páginasCasa Container TCCPablo BateraAinda não há avaliações
- TS BR MacRo. Barrera Fluxo de Detritos PT Dec13Documento2 páginasTS BR MacRo. Barrera Fluxo de Detritos PT Dec13Marcos MaAinda não há avaliações
- Quando o Diabo Usa A Palavra de Deus Contra NósDocumento9 páginasQuando o Diabo Usa A Palavra de Deus Contra NósDAVID ALEXANDRE ROSA CRUZAinda não há avaliações
- Dud AaaaaDocumento4 páginasDud Aaaaa7qg7nkgw9jAinda não há avaliações
- Cartilha - Pratique SaúdeDocumento8 páginasCartilha - Pratique SaúdeMelka RamalhoAinda não há avaliações
- 9-A-Querela Escolastica Dialetico Versus AntidialeticosDocumento25 páginas9-A-Querela Escolastica Dialetico Versus AntidialeticosValéria TavaresAinda não há avaliações
- CAT Comunicação Acidente Do TrabalhoDocumento1 páginaCAT Comunicação Acidente Do TrabalhoRosa Luiza Miranda0% (2)
- Marta Anaísa Bezerra Ramos (UFPB)Documento14 páginasMarta Anaísa Bezerra Ramos (UFPB)Nilson Barbosa100% (1)
- Comando OracleDocumento3 páginasComando OracleDouglas MeloAinda não há avaliações
- PG 25Documento7 páginasPG 25maribatista9400Ainda não há avaliações
- Oficinas de Aprendizagem LibrasDocumento76 páginasOficinas de Aprendizagem LibrasBenjamin Hoffman100% (8)
- Plano - Teorias Da PoesiaDocumento6 páginasPlano - Teorias Da PoesiaJerô FraneffAinda não há avaliações
- Publico PT 03 12Documento48 páginasPublico PT 03 12GidalfoLopesAinda não há avaliações
- Cancelamento de NF-e: guia passo a passoDocumento2 páginasCancelamento de NF-e: guia passo a passoBeto CalmonAinda não há avaliações
- EY Tax Alert - IN RFB 1.152 - 2022Documento3 páginasEY Tax Alert - IN RFB 1.152 - 2022Vinicius OSAinda não há avaliações
- O Servo de DeusDocumento8 páginasO Servo de DeusAmós PontesAinda não há avaliações
- Quem é o dono do samba? Discursos sobre origem e apropriaçãoDocumento118 páginasQuem é o dono do samba? Discursos sobre origem e apropriaçãoAndré de MenezesAinda não há avaliações
- Introdução à Filosofia no Curso de Ensino de BiologiaDocumento4 páginasIntrodução à Filosofia no Curso de Ensino de BiologiaAruny Agi Aruny0% (1)
- Cartao EnemDocumento1 páginaCartao EnemFelipe ManoelAinda não há avaliações
- Sistemas trifásicos: construção de ondas sinusoidais e alternadoresDocumento32 páginasSistemas trifásicos: construção de ondas sinusoidais e alternadoresRito TavaresAinda não há avaliações
- Alimentação No 1º Ano de Vida (Final)Documento2 páginasAlimentação No 1º Ano de Vida (Final)Paulo OliveiraAinda não há avaliações
- CLC 7 Ficha 9 EnunciadoDocumento2 páginasCLC 7 Ficha 9 EnunciadoSónia Baptista50% (2)
- Cobertura de estrutura metálica com policarbonatoDocumento1 páginaCobertura de estrutura metálica com policarbonatoRudolphKruppAinda não há avaliações
- Arquitetura TCP/IP, topologias e núcleo de redesDocumento49 páginasArquitetura TCP/IP, topologias e núcleo de redeshhsallesAinda não há avaliações
- ECA CurriculumDocumento121 páginasECA CurriculumthokolanaAinda não há avaliações
- Advérbios No JaponêsDocumento9 páginasAdvérbios No JaponêsCláudio Fuzita100% (1)
- 1ano Revisao Meio Ambiente PDFDocumento12 páginas1ano Revisao Meio Ambiente PDFElga DoriaAinda não há avaliações
- Manual Preps GuiaDocumento15 páginasManual Preps GuiakidmaisAinda não há avaliações