Você também pode gostar
- Álgebra Lineal Serie Universitaria Patria - (PG 83 - 101) PDFDocumento19 páginasÁlgebra Lineal Serie Universitaria Patria - (PG 83 - 101) PDFluis eduardoAinda não há avaliações
- Proteccion para Piernas y PiesDocumento33 páginasProteccion para Piernas y PiesPedro González64% (11)
- TPS1 Algebra IiDocumento16 páginasTPS1 Algebra IiJohsneik Antonio Briceño BonillaAinda não há avaliações
- Parcial Tema # 3Documento4 páginasParcial Tema # 3Kevin Duban Aguilar VargasAinda não há avaliações
- Trabajo Analisis Numerico Eje2Documento22 páginasTrabajo Analisis Numerico Eje2dymmx59x2wAinda não há avaliações
- Solucionario Capítulo 8 Geometría AnalíticaDocumento38 páginasSolucionario Capítulo 8 Geometría AnalíticaAlejandro MobileAinda não há avaliações
- Primer Examen Parcial Area: Matematicas Fecha: 12/09/2018 Tiempo de Desarrollo Del Examen: 90minutosDocumento4 páginasPrimer Examen Parcial Area: Matematicas Fecha: 12/09/2018 Tiempo de Desarrollo Del Examen: 90minutosJesusCalamaniAinda não há avaliações
- Sparcial-3 12 2014Documento4 páginasSparcial-3 12 2014Luz aleyda Choque cruzAinda não há avaliações
- Ecuaciones de La RectaDocumento17 páginasEcuaciones de La RectaMarcial SanchezAinda não há avaliações
- Sistemas de Ecuaciones 2 - 2Documento3 páginasSistemas de Ecuaciones 2 - 2Sara Fernanda Cuervo RamirezAinda não há avaliações
- Taller Sistemas de Ecuaciones Lineales y No LinealesDocumento24 páginasTaller Sistemas de Ecuaciones Lineales y No Linealeswilliam benedettyAinda não há avaliações
- Parcial Algebra LinealDocumento1 páginaParcial Algebra LinealSkapAinda não há avaliações
- LogísticaDocumento16 páginasLogísticathoroidAinda não há avaliações
- A12 Programacion LinealDocumento13 páginasA12 Programacion LinealGermán HerránAinda não há avaliações
- + y +z =24 restriccióm Despejamos: f x, y, z ∇ f =λ ∇ g= yz ,xz, xy=λ (3x ,3 y, 3z λ yz= λ3x yzDocumento3 páginas+ y +z =24 restriccióm Despejamos: f x, y, z ∇ f =λ ∇ g= yz ,xz, xy=λ (3x ,3 y, 3z λ yz= λ3x yzIsabella Hernandez ZunigaAinda não há avaliações
- Solución - PR5 A2 14 (A)Documento6 páginasSolución - PR5 A2 14 (A)Deyver Morales YarlequeAinda não há avaliações
- Teoría de ExponentesDocumento3 páginasTeoría de ExponentesYamile Gonzales SobrinoAinda não há avaliações
- Algebra METODOSDocumento7 páginasAlgebra METODOSJose PazAinda não há avaliações
- Bertha Octave4Documento11 páginasBertha Octave4Andres Javier PelaezAinda não há avaliações
- Exponentes y Radicales PDFDocumento16 páginasExponentes y Radicales PDFprigogineAinda não há avaliações
- Semana 1 Leyes de Exponentes I. CompletoDocumento19 páginasSemana 1 Leyes de Exponentes I. CompletoSebas Socualaya OsedaAinda não há avaliações
- Ejercicios Paralelismo, Ortogonalidad e Interseccion en Rectas R2Documento3 páginasEjercicios Paralelismo, Ortogonalidad e Interseccion en Rectas R2fabi JimenezAinda não há avaliações
- Hoja de Trabajo Nº5Documento4 páginasHoja de Trabajo Nº5Jonatan ArceAinda não há avaliações
- Sistema de Ecuaciones Lineales y Método de Eliminación de GaussDocumento3 páginasSistema de Ecuaciones Lineales y Método de Eliminación de GaussAlejandro FernandezAinda não há avaliações
- Matriz Diagonalizadora Y Matriz DiagonalDocumento7 páginasMatriz Diagonalizadora Y Matriz DiagonalalfaferrAinda não há avaliações
- CuadraticaDocumento20 páginasCuadraticaNicolas Diaz Alvarez0% (1)
- Sistemas EcuacionalesDocumento10 páginasSistemas EcuacionalesnatuAinda não há avaliações
- Cartilla S1 PDFDocumento10 páginasCartilla S1 PDFOlsen OlsenAinda não há avaliações
- MatesDocumento7 páginasMates1SRA3LAinda não há avaliações
- Tarea 5 - Geometria AnaliticaDocumento9 páginasTarea 5 - Geometria Analiticasan fernandoAinda não há avaliações
- Taller 5, Álgebra Lineal, 2022-IIDocumento3 páginasTaller 5, Álgebra Lineal, 2022-IIJuan Camilo Holguín ZuluagaAinda não há avaliações
- 2PC Bma03 2022-0Documento2 páginas2PC Bma03 2022-0luisangelAinda não há avaliações
- Areas en Coordenadas Cartesianas... Ordenados 2Documento21 páginasAreas en Coordenadas Cartesianas... Ordenados 2Jose alex contrerasAinda não há avaliações
- Unidad 3 - Tarea 3 - Espacios Vectoriales - Alexander GambaDocumento10 páginasUnidad 3 - Tarea 3 - Espacios Vectoriales - Alexander GambaEdward Lenin Arenas JimenezAinda não há avaliações
- Tarea 3 Sistema de Ecuaciones Lineales Rectas Planos y Espacios VectorialesDocumento18 páginasTarea 3 Sistema de Ecuaciones Lineales Rectas Planos y Espacios Vectorialesmaurice garciaAinda não há avaliações
- Tarea 3 - Sistema de Ecuaciones Lineales, Rectas, Planos y Espacios VectorialesDocumento15 páginasTarea 3 - Sistema de Ecuaciones Lineales, Rectas, Planos y Espacios VectorialesJimmy Delgado50% (2)
- 62 MatricesDocumento5 páginas62 MatricesNAHUEL DAVID PEREZAinda não há avaliações
- Unadm 03 CVV 2021-02-15 Unidad2actividad1ecuacionesparametricasDocumento2 páginasUnadm 03 CVV 2021-02-15 Unidad2actividad1ecuacionesparametricasJosé Luis Sánchez LópezAinda não há avaliações
- Ecuaciones DiferencialesDocumento7 páginasEcuaciones Diferencialesluz fraileAinda não há avaliações
- MatricesDocumento5 páginasMatricesMillonschik MartinAinda não há avaliações
- 003-T-Funciones TrascendentesDocumento48 páginas003-T-Funciones TrascendentesJusti Aspiroz KnudtsenAinda não há avaliações
- Ejercicio 4Documento3 páginasEjercicio 4Valeria MartinezAinda não há avaliações
- 1,2,3Documento7 páginas1,2,3Edwin Daniel Navarro ValenzuelaAinda não há avaliações
- Clase 19 de FebreroDocumento15 páginasClase 19 de FebreroAndrea FierroAinda não há avaliações
- FMMP312 s10 GomezDocumento27 páginasFMMP312 s10 Gomezlomejor delalifeAinda não há avaliações
- Líneas Notable Del Triángulos AplicacionesDocumento18 páginasLíneas Notable Del Triángulos AplicacionesJikook KookminAinda não há avaliações
- Parcial 1 de Algebra 2 FiubaDocumento10 páginasParcial 1 de Algebra 2 FiubaalexzAinda não há avaliações
- 1 Parcial MAT I 2015 PDFDocumento5 páginas1 Parcial MAT I 2015 PDFDaniel SarabiaAinda não há avaliações
- Ejercicios Eje 3 de 1Documento20 páginasEjercicios Eje 3 de 1Marelin FontalvoAinda não há avaliações
- PDF Correccion Examen Final Semestre I05 Calculo III - Compress PDFDocumento11 páginasPDF Correccion Examen Final Semestre I05 Calculo III - Compress PDFMijael Maicol Zarate GuzmanAinda não há avaliações
- Tarea 3 - Aplicaciones de Las Integrales XDocumento5 páginasTarea 3 - Aplicaciones de Las Integrales XximenaAinda não há avaliações
- Tarea 3algebra LinealDocumento31 páginasTarea 3algebra LinealHamer Asdrubal Vergara BohorquezAinda não há avaliações
- Victor - Ejercicios IndividualesDocumento4 páginasVictor - Ejercicios Individualesvictor serranoAinda não há avaliações
- EID Ecuaciones DiferencialesDocumento6 páginasEID Ecuaciones DiferencialesMatiasAinda não há avaliações
- Upt ElvisDocumento2 páginasUpt ElvisFrancis W. ArellanoAinda não há avaliações
- AlgebraDocumento31 páginasAlgebraImanol Jesus Palpa ChavezAinda não há avaliações
- Trabajo FinalDocumento15 páginasTrabajo Finalsantiago vasquez riveraAinda não há avaliações
- Funciones y Sucession - GRUPO 100410 - 377Documento13 páginasFunciones y Sucession - GRUPO 100410 - 377sara torresAinda não há avaliações
- Ficha Pedagógica Matemática 1 BGU Semana3 Segundo TrimestreDocumento5 páginasFicha Pedagógica Matemática 1 BGU Semana3 Segundo TrimestreVICTOR GONZALO MARTINEZ MEZAAinda não há avaliações
- Tarea 4 - Ejercicio 1 2 3 Literal CDocumento11 páginasTarea 4 - Ejercicio 1 2 3 Literal CLeonardo RossyAinda não há avaliações
- Como Funciona El KersDocumento7 páginasComo Funciona El KersGuille EscobarAinda não há avaliações
- Corriente Alterna PDFDocumento10 páginasCorriente Alterna PDFJeanAinda não há avaliações
- Edgar Allan Poe - El Corazon DelatorDocumento3 páginasEdgar Allan Poe - El Corazon DelatorMiguel Angel Olvera GarciaAinda não há avaliações
- Cont A Bi Lid AdDocumento6 páginasCont A Bi Lid AdGuille EscobarAinda não há avaliações
- Guía de Trabajo TutoríasDocumento2 páginasGuía de Trabajo TutoríasRocio Cruz ParadaAinda não há avaliações
- Estudio de Un Modelo Poblacional Dinamico de Dos Especies Con Interaccion CooperativaDocumento14 páginasEstudio de Un Modelo Poblacional Dinamico de Dos Especies Con Interaccion CooperativaJosue Alejandro Alemán VilisAinda não há avaliações
- Furlong, Guillermo - El Primer Astrónomo Argentino. Buenaventura Suárez S.J. (Biblioteca USAL) PDFDocumento16 páginasFurlong, Guillermo - El Primer Astrónomo Argentino. Buenaventura Suárez S.J. (Biblioteca USAL) PDFMariana SchosslerAinda não há avaliações
- CoagulacionDocumento13 páginasCoagulacionDaniel SolarAinda não há avaliações
- Trabajo 01 Ingenieria Sismica - Grupo 06 Aisladores SismicosDocumento25 páginasTrabajo 01 Ingenieria Sismica - Grupo 06 Aisladores SismicosLuis Enrique Hidalgo ValladaresAinda não há avaliações
- Tabla de Materiales de ConstruccionDocumento77 páginasTabla de Materiales de ConstruccionYesenia Luna100% (1)
- Soldadura Por Arco PalenqueDocumento29 páginasSoldadura Por Arco PalenqueJavier Avelino AlvarezAinda não há avaliações
- Tema1-Control CalidadDocumento14 páginasTema1-Control CalidadAlejandroAinda não há avaliações
- Niels BohrDocumento7 páginasNiels BohrGpe. Rios OchoaAinda não há avaliações
- Labbox CatalogoDocumento220 páginasLabbox CatalogopepitoAinda não há avaliações
- BoussartDocumento3 páginasBoussartFernando Morales100% (1)
- Amplificadores de Pequeña Señal RF y FIDocumento7 páginasAmplificadores de Pequeña Señal RF y FIJorge BalzaAinda não há avaliações
- Micro Servo RobotDocumento8 páginasMicro Servo RobotCristianAinda não há avaliações
- Los Ventiladores Industriales Son Utilizados en Los Procesos Industriales para Transportar Aire y GasesDocumento5 páginasLos Ventiladores Industriales Son Utilizados en Los Procesos Industriales para Transportar Aire y GasesCarlomagno Bautista OrtizAinda não há avaliações
- Informe de Plasmolisis y Turgencia 2Documento39 páginasInforme de Plasmolisis y Turgencia 2Eduardo Everdeen100% (1)
- Potencial QuímicoDocumento41 páginasPotencial QuímicoMartín SanzAinda não há avaliações
- Informe de Laboratorio - Isotermas de AdsorciónDocumento18 páginasInforme de Laboratorio - Isotermas de AdsorciónEver Cerna Vargas100% (1)
- Sesión 31 - 5primDocumento2 páginasSesión 31 - 5primkarito orbegoso rodriguezAinda não há avaliações
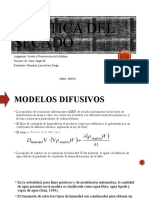
- Cinética Del SecadoDocumento13 páginasCinética Del SecadoAlvaro Diego Mendoza LaraAinda não há avaliações
- La Medición en FisicaDocumento3 páginasLa Medición en FisicaAnyerson VelascoAinda não há avaliações
- Hoja de Seguridad de Mobil Rarus 427Documento11 páginasHoja de Seguridad de Mobil Rarus 427WilliamSiesquenIngaAinda não há avaliações
- CatalogoDocumento162 páginasCatalogoDiomer CastroAinda não há avaliações
- Abreviaturas FormulasDocumento7 páginasAbreviaturas FormulasdayaestefAinda não há avaliações
- Tiristores para El Control de Temperatura 201Documento4 páginasTiristores para El Control de Temperatura 201AdrianMartinezMendezAinda não há avaliações
- Hidrologia OllantaytamboDocumento16 páginasHidrologia OllantaytamboloyolalopezAinda não há avaliações
- El Conocimiento de Las Propiedades Físicas de Los Granos y SemillasDocumento1 páginaEl Conocimiento de Las Propiedades Físicas de Los Granos y SemillasAnonymous SyvQ3hUAinda não há avaliações
- Biografía Jean NouvelDocumento137 páginasBiografía Jean NouvelHebert Chavez CaceresAinda não há avaliações
- Calculo Vectorial UTBDocumento2 páginasCalculo Vectorial UTBJorge Alberto Osorio DuranAinda não há avaliações
- Guía Elementos de MaquinasDocumento34 páginasGuía Elementos de MaquinasAnonymous gEeZc15peQAinda não há avaliações