Você também pode gostar
- Redes - Profinet e ProfibusDocumento19 páginasRedes - Profinet e ProfibusFakezorJansabeAinda não há avaliações
- Redes Indústriais Sensor BusDocumento25 páginasRedes Indústriais Sensor BusJBBARAinda não há avaliações
- Aula 4 - Redes de Comunicação IndustrialDocumento36 páginasAula 4 - Redes de Comunicação IndustrialRoger Danilo FiglieAinda não há avaliações
- UntitledDocumento18 páginasUntitledJhuno Silva PaulaAinda não há avaliações
- Redes Industriais Laboratório 1Documento17 páginasRedes Industriais Laboratório 1CAROLINE CIELLOAinda não há avaliações
- Doctecnico RedesDocumento44 páginasDoctecnico RedesClayton MouraAinda não há avaliações
- Redes IndustriaisDocumento16 páginasRedes IndustriaisEduardo PardinhoAinda não há avaliações
- Avaliação de Redes IndustriaisDocumento3 páginasAvaliação de Redes IndustriaisreverthoncratoAinda não há avaliações
- Protocolos de Comunicação Usados em Instrumentação (Artigo)Documento8 páginasProtocolos de Comunicação Usados em Instrumentação (Artigo)Carla Jaciara SousaAinda não há avaliações
- Simulação do Protocolo ModBus em Redes IndustriaisDocumento17 páginasSimulação do Protocolo ModBus em Redes IndustriaisCAROLINE CIELLOAinda não há avaliações
- AUTREDES4Documento38 páginasAUTREDES4Pedro AugustoAinda não há avaliações
- RedesDocumento15 páginasRedesNoemar GiombelliAinda não há avaliações
- Tipos de Redes IndustriaisDocumento26 páginasTipos de Redes IndustriaisKleber SantosAinda não há avaliações
- Redes Digitais Com Tecnologia FieldbusDocumento6 páginasRedes Digitais Com Tecnologia FieldbusAramis PizzaAinda não há avaliações
- Protocolos e InterfacesDocumento31 páginasProtocolos e InterfacesManoel Hermínio Vieira NetoAinda não há avaliações
- Aula 3 - Redes de ComunicacaoDocumento48 páginasAula 3 - Redes de ComunicacaoMauro CostaAinda não há avaliações
- A tecnologia Foundation Fieldbus e suas principais característicasDocumento3 páginasA tecnologia Foundation Fieldbus e suas principais característicasGraciolina RosaAinda não há avaliações
- Cabeamento 1Documento17 páginasCabeamento 1SIDNEY VENTURYAinda não há avaliações
- Automação Industrial: Material de Consulta para Os AlunosDocumento6 páginasAutomação Industrial: Material de Consulta para Os Alunosbruno CiprianoAinda não há avaliações
- Os Sistemas de Automação Industrias Englobam Uma Variedade de Tecnologias Onde As Áreas de ComputaçãoDocumento5 páginasOs Sistemas de Automação Industrias Englobam Uma Variedade de Tecnologias Onde As Áreas de ComputaçãoJosé Ganga BarbosaAinda não há avaliações
- Tutorial CA Beamen ToDocumento19 páginasTutorial CA Beamen TowtkubotaAinda não há avaliações
- Protocolos de ComunicaçãoDocumento4 páginasProtocolos de ComunicaçãoJuliano SalvattoreAinda não há avaliações
- Resumo Redes IIDocumento5 páginasResumo Redes IIIsabela SoaresAinda não há avaliações
- Redes Industriais Fieldbus e Devicenet - (UFRN)Documento5 páginasRedes Industriais Fieldbus e Devicenet - (UFRN)Aramis PizzaAinda não há avaliações
- Aula 6 - Redes de ComunicaçãoDocumento35 páginasAula 6 - Redes de ComunicaçãoKleiton RoneAinda não há avaliações
- Rede de computadores e automação industrialDocumento16 páginasRede de computadores e automação industrialMRLN-LCSAinda não há avaliações
- Protocolos de Comunicação ProfibusDocumento10 páginasProtocolos de Comunicação ProfibusRafaelAinda não há avaliações
- Redes Industriais e Protocolos TCP/IP, Modbus e ProfibusDocumento3 páginasRedes Industriais e Protocolos TCP/IP, Modbus e ProfibusDavid MendelsohnAinda não há avaliações
- O que é PROFIBUSDocumento24 páginasO que é PROFIBUSestradeiroAinda não há avaliações
- O Protocolo PROFIBUS (Parte I)Documento5 páginasO Protocolo PROFIBUS (Parte I)Julia-e Regina-e AlexandreAinda não há avaliações
- Control NetDocumento15 páginasControl NetRubensMoraisAinda não há avaliações
- Plano de Aula Tema1 Redes IndustriaisDocumento12 páginasPlano de Aula Tema1 Redes IndustriaisDenilson Wagner ZaidanAinda não há avaliações
- 1-Conceitos de Comunicação em RedeDocumento21 páginas1-Conceitos de Comunicação em RedeAllison Vitor AmaranteAinda não há avaliações
- Cabeamento Estruturado PDFDocumento7 páginasCabeamento Estruturado PDFzanderjaAinda não há avaliações
- Redes IndustriaisDocumento5 páginasRedes IndustriaisMarcelo AugustoAinda não há avaliações
- Apostila Conceitos Sobre FieldbusDocumento54 páginasApostila Conceitos Sobre FieldbusValdy NascimentoAinda não há avaliações
- Redes Industriais (Protocolos)Documento10 páginasRedes Industriais (Protocolos)João VictorAinda não há avaliações
- Rede DeviceNetDocumento21 páginasRede DeviceNetAlex Tolini100% (1)
- TrabalhoDocumento10 páginasTrabalhoMarcos ViniciusAinda não há avaliações
- Redes industriais e comunicação automaçãoDocumento16 páginasRedes industriais e comunicação automaçãorenato Sousa Mendes de QueirozAinda não há avaliações
- Aula9-Redes Na Automacao Industrial Parte1Documento16 páginasAula9-Redes Na Automacao Industrial Parte1wellingtonneguin29Ainda não há avaliações
- Protocolos IndustriaisDocumento14 páginasProtocolos IndustriaisHalamasSimonAinda não há avaliações
- Trabalho DeviceNet e ProfiNetDocumento2 páginasTrabalho DeviceNet e ProfiNetmarceloAinda não há avaliações
- Redes de Computadores e InternetDocumento88 páginasRedes de Computadores e InternetRaphael MatosAinda não há avaliações
- Trabalho Informática Industrial - 3Documento4 páginasTrabalho Informática Industrial - 3Érico MartinsAinda não há avaliações
- Ebook Redes PROFINET - PPTX 1Documento22 páginasEbook Redes PROFINET - PPTX 1Michel Augusto VillaAinda não há avaliações
- Redes industriais na automaçãoDocumento52 páginasRedes industriais na automaçãopaulo andréAinda não há avaliações
- Relatório DeviceNetDocumento19 páginasRelatório DeviceNetVinicAinda não há avaliações
- Redes Aula3Documento21 páginasRedes Aula3Noemar GiombelliAinda não há avaliações
- Trabalho FieldBus FoundationDocumento10 páginasTrabalho FieldBus FoundationHumberto PacelleAinda não há avaliações
- Rede InterbusDocumento7 páginasRede InterbusGianey Fernandes da SilvaAinda não há avaliações
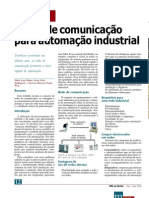
- Redes de comunicação para automação industrialDocumento3 páginasRedes de comunicação para automação industrialsilasbragaAinda não há avaliações
- Trabalho Escolar Sobre Fibras OpticasDocumento22 páginasTrabalho Escolar Sobre Fibras OpticasDanilokindimAinda não há avaliações
- Comunicação Rs-485 Modbus Para Medir Ph Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandComunicação Rs-485 Modbus Para Medir Ph Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Comunicação Rs-485 Modbus Para Medir Co Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandComunicação Rs-485 Modbus Para Medir Co Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Projetos Com Esp32 Programado Em Arduino - Parte IiNo EverandProjetos Com Esp32 Programado Em Arduino - Parte IiAinda não há avaliações
- Desenvolvendo Um Medidor De Célula De Carga Modbus Para Leitura No Elipse Com Interface Rs485 No PicNo EverandDesenvolvendo Um Medidor De Célula De Carga Modbus Para Leitura No Elipse Com Interface Rs485 No PicAinda não há avaliações
- Implementando Em Visual Basic Via Rs485 Modbus Master-slave Com Base No Stm32f103c8 Programado Em ArduinoNo EverandImplementando Em Visual Basic Via Rs485 Modbus Master-slave Com Base No Stm32f103c8 Programado Em ArduinoAinda não há avaliações
- Desenvolvendo Um Sensor De Corrente Modbus Rs232 No PicNo EverandDesenvolvendo Um Sensor De Corrente Modbus Rs232 No PicAinda não há avaliações
- Desenvolvendo Um Medidor De Fluxo De Massa Modbus Rs485 No ArduinoNo EverandDesenvolvendo Um Medidor De Fluxo De Massa Modbus Rs485 No ArduinoAinda não há avaliações
- Sistemas e Tecnologias de Informação Como Ferramentas Par GestãoDocumento11 páginasSistemas e Tecnologias de Informação Como Ferramentas Par GestãoDenilson MiguelAinda não há avaliações
- Evolução Dos Sistemas de InformaçaoDocumento6 páginasEvolução Dos Sistemas de InformaçaoDenilson MiguelAinda não há avaliações
- Inovação em Angola - Internet 4GDocumento8 páginasInovação em Angola - Internet 4GDenilson MiguelAinda não há avaliações
- Administração de Recursos HumanosDocumento15 páginasAdministração de Recursos HumanosDenilson MiguelAinda não há avaliações
- Ferramentas Da QualidadeDocumento21 páginasFerramentas Da QualidadeDenilson MiguelAinda não há avaliações
- Chuvas ÁcidasDocumento10 páginasChuvas ÁcidasDenilson MiguelAinda não há avaliações
- Trabalho LIPIDOSDocumento12 páginasTrabalho LIPIDOSDenilson MiguelAinda não há avaliações
- Mãos: ossos, articulações e ligamentosDocumento12 páginasMãos: ossos, articulações e ligamentosDenilson MiguelAinda não há avaliações
- Denilson-Trabalho OSI. TCP. IPDocumento23 páginasDenilson-Trabalho OSI. TCP. IPDenilson MiguelAinda não há avaliações
- Meios de Transmissão de DadosDocumento9 páginasMeios de Transmissão de DadosDenilson MiguelAinda não há avaliações
- Trabalho Piramide D MaslowDocumento13 páginasTrabalho Piramide D MaslowDenilson MiguelAinda não há avaliações
- O BasquetebolDocumento6 páginasO BasquetebolDenilson MiguelAinda não há avaliações
- Cedeao Trabalho2Documento12 páginasCedeao Trabalho2Denilson MiguelAinda não há avaliações
- Automação e Robótica IndustrialDocumento13 páginasAutomação e Robótica IndustrialDenilson MiguelAinda não há avaliações
- Segurança Sistemas WebDocumento32 páginasSegurança Sistemas WebMarcos Roberto C. FariaAinda não há avaliações
- Contra A Censura Na Net - Como Alterar Os Servidores de DNS No Ubuntu e Kubuntu (Ubuntu Com KDE)Documento8 páginasContra A Censura Na Net - Como Alterar Os Servidores de DNS No Ubuntu e Kubuntu (Ubuntu Com KDE)alexAinda não há avaliações
- InformaticaDocumento161 páginasInformaticaGilmar Miranda100% (1)
- Manual SDA 5000 PortuguêsDocumento262 páginasManual SDA 5000 PortuguêsGilmarsam100% (1)
- Aula 05-Cespe-Redes-e-Internet (1) EXPONENCIALDocumento120 páginasAula 05-Cespe-Redes-e-Internet (1) EXPONENCIALRAFAEL FERRAZ COUTINHOAinda não há avaliações
- Tutorial GGPODocumento4 páginasTutorial GGPOmarcelometalcuryAinda não há avaliações
- mgv7 RoteiroDocumento35 páginasmgv7 RoteiroEdgar SousaAinda não há avaliações
- Manual CIP 850Documento221 páginasManual CIP 850Luiz Felipe Melo DiasAinda não há avaliações
- NX 3005Documento277 páginasNX 3005Daniel OliveiraAinda não há avaliações
- Certificaxto Comercial YealinkDocumento131 páginasCertificaxto Comercial YealinkLaura AlvesAinda não há avaliações
- 7.2.7 Lab View Network Device Mac Addresses PT BRDocumento6 páginas7.2.7 Lab View Network Device Mac Addresses PT BRKlayton PiresAinda não há avaliações
- Instalando o Firewall No LinuxDocumento6 páginasInstalando o Firewall No LinuxCesar Augustus SilvaAinda não há avaliações
- Criptografia simétrica x assimétricaDocumento17 páginasCriptografia simétrica x assimétricaEliandro OliveiraAinda não há avaliações
- BOM Drop Priced V3Documento3 páginasBOM Drop Priced V3Romi RaofAinda não há avaliações
- Manual EcoSOlysDocumento2 páginasManual EcoSOlysWaudelia Gonçalves Dos Santos SilvaAinda não há avaliações
- EXERCICIOS DE REDES DE COMPUTADORES Com Respostas PDFDocumento7 páginasEXERCICIOS DE REDES DE COMPUTADORES Com Respostas PDFLucas RamosAinda não há avaliações
- JFL Download Convencionais Manual Brisa Cell 804Documento16 páginasJFL Download Convencionais Manual Brisa Cell 804Cassio AlexandreAinda não há avaliações
- Guia de Boas Praticas Switches SiteDocumento10 páginasGuia de Boas Praticas Switches SiteRenatoAinda não há avaliações
- GoTo - Manual Pos-AtivaçãoDocumento12 páginasGoTo - Manual Pos-AtivaçãoNelson NetoAinda não há avaliações
- (RODA DA FORTUNA) - Eixo Físico - Espiritual (Virgem-Peixes) Nas Casas 6-12 Fórum AstrolinwDocumento14 páginas(RODA DA FORTUNA) - Eixo Físico - Espiritual (Virgem-Peixes) Nas Casas 6-12 Fórum AstrolinwalexandreAinda não há avaliações
- Especificacao DVR HDL 16A-480Documento28 páginasEspecificacao DVR HDL 16A-480nelsonpennaAinda não há avaliações
- Instalando OCS Inventory + GLPI No Debian Lenny 5 + OCS Inventory NG Agents AC Tecnologia Da InformaçãoDocumento12 páginasInstalando OCS Inventory + GLPI No Debian Lenny 5 + OCS Inventory NG Agents AC Tecnologia Da InformaçãoV. AquinoAinda não há avaliações
- Configurar servidores e instalar sistemas operativosDocumento157 páginasConfigurar servidores e instalar sistemas operativosWesley ManuelAinda não há avaliações
- Manual do Relógio de Ponto MICROPOINT SDocumento26 páginasManual do Relógio de Ponto MICROPOINT SOneir Lima0% (1)
- Luiz Vieira Ferramentas Livres para Teste de InvasaoDocumento31 páginasLuiz Vieira Ferramentas Livres para Teste de InvasaorobsonlopesrloAinda não há avaliações
- AGGREGAÇÃO DE PORTAS E PROTOCOLOS DE REDEDocumento3 páginasAGGREGAÇÃO DE PORTAS E PROTOCOLOS DE REDENando GomesAinda não há avaliações
- ORION - Baterias Lition - Moura - Rev02Documento17 páginasORION - Baterias Lition - Moura - Rev02Magaiver TelecomAinda não há avaliações
- Load RunnerDocumento12 páginasLoad RunnerleoazzolaAinda não há avaliações
- Manual VW16ZETHGPRS - V5.70 - R1.70Documento81 páginasManual VW16ZETHGPRS - V5.70 - R1.70natanlAinda não há avaliações
- Curso de Redes PDFDocumento93 páginasCurso de Redes PDFPaulo CorreiaAinda não há avaliações