Você também pode gostar
- Codigos GDocumento39 páginasCodigos GLuis VazquezAinda não há avaliações
- Códigos GDocumento38 páginasCódigos GDaniel PGAinda não há avaliações
- Procesos de Manufactura I Programación para Máquinas CNC: Profesor: Bastian Vergara Gallegos Correo: Bvergara@ubiobio - CLDocumento18 páginasProcesos de Manufactura I Programación para Máquinas CNC: Profesor: Bastian Vergara Gallegos Correo: Bvergara@ubiobio - CLBrhayams Gacitua GuiñezAinda não há avaliações
- Fresado Codigos G-MDocumento2 páginasFresado Codigos G-MJonas Hernandez VelascoAinda não há avaliações
- Codigo G - Fagor 8025-Fresadora-2024Documento2 páginasCodigo G - Fagor 8025-Fresadora-2024Fernando Pastén FernándezAinda não há avaliações
- Torno Codigos G-MDocumento2 páginasTorno Codigos G-MJean Paul Giraldo SpatolaAinda não há avaliações
- Códigos G-MDocumento2 páginasCódigos G-MSagiro PigeonAinda não há avaliações
- Funciones G y M Torno Control SINUMERIK 810-820Documento2 páginasFunciones G y M Torno Control SINUMERIK 810-820Homer Texido FrangioniAinda não há avaliações
- Codigo G CNCDocumento2 páginasCodigo G CNCCar Jav Esp100% (1)
- Tutorial CNCDocumento74 páginasTutorial CNCJulio CastilloAinda não há avaliações
- 5 Codigos ISO TornoDocumento2 páginas5 Codigos ISO TornoFranck CamposAinda não há avaliações
- Torno CNC y Torno ConvencionalDocumento5 páginasTorno CNC y Torno ConvencionalLuis Albert Alvarez GutierrezAinda não há avaliações
- Apuntes CNC TornoDocumento17 páginasApuntes CNC TornoScipion AfrikanAinda não há avaliações
- Capacitacion Torno CNCDocumento27 páginasCapacitacion Torno CNCRene Fernando Palavecinos Gonzalez0% (1)
- 03 CNC FresaDocumento55 páginas03 CNC FresahamidhardAinda não há avaliações
- Listado de Comandos WinunisoftDocumento2 páginasListado de Comandos WinunisoftArtesanías Namaste100% (1)
- CODIGOSDocumento11 páginasCODIGOSEdith SepulvedaAinda não há avaliações
- Codigos de CNCDocumento4 páginasCodigos de CNCAldnoah_LordAinda não há avaliações
- Códigos G Y MDocumento9 páginasCódigos G Y MChaariitoo FlooreesAinda não há avaliações
- Codigos de CNCDocumento4 páginasCodigos de CNCsars100% (1)
- Catalogo HaasDocumento11 páginasCatalogo HaasGarcia Gonzalez BenignoAinda não há avaliações
- Diapositivas CNC 1Documento11 páginasDiapositivas CNC 1Alberto OrihuelaAinda não há avaliações
- CNC Manual de ProgramaciónDocumento195 páginasCNC Manual de ProgramaciónMaria Guadalupe Sanchez Villafaña100% (1)
- Codigos GDocumento44 páginasCodigos GAnton Repka100% (1)
- CNC FresaDocumento11 páginasCNC FresaJean Alexandre Quispe FloresAinda não há avaliações
- Programacion Tornos Fanuc PDFDocumento195 páginasProgramacion Tornos Fanuc PDFAtropos Samael R100% (1)
- Lista de Codigos GDocumento1 páginaLista de Codigos GRoger LeeijaaAinda não há avaliações
- Códigos CNC (WinUnisoft)Documento16 páginasCódigos CNC (WinUnisoft)Kevin Salazar100% (1)
- Presentacion Torno Okuma.Documento14 páginasPresentacion Torno Okuma.Oswaldo NeaveAinda não há avaliações
- Codigos G y M TraducidosDocumento2 páginasCodigos G y M TraducidosJuan David Camargo EslavaAinda não há avaliações
- Codigos G y M para CNCDocumento5 páginasCodigos G y M para CNCracAinda não há avaliações
- Comandos CNCDocumento5 páginasComandos CNCMaríaJoséCamposeco100% (1)
- Codigos G y MDocumento2 páginasCodigos G y Mlucian lunaAinda não há avaliações
- Tabla de Códigos G y MDocumento4 páginasTabla de Códigos G y Msantiago quelalAinda não há avaliações
- Codigos G y M SinumerikDocumento4 páginasCodigos G y M SinumerikMaiki Alcala Covarrubias100% (1)
- Códigos GDocumento1 páginaCódigos Galan villaAinda não há avaliações
- Estructura de Un Bloque de Programacion CNCDocumento12 páginasEstructura de Un Bloque de Programacion CNCJesusAinda não há avaliações
- Practica 2 Lab de CNCDocumento6 páginasPractica 2 Lab de CNCAlejandro GonzalezAinda não há avaliações
- Códigos MisceláneosDocumento8 páginasCódigos MisceláneosJose De SantiagoAinda não há avaliações
- CNC FresaDocumento31 páginasCNC FresaaamarosaAinda não há avaliações
- Codigos GM FresadoraDocumento14 páginasCodigos GM FresadoraLuis GarciaAinda não há avaliações
- Codigos G - M CNCDocumento6 páginasCodigos G - M CNCyoucobaAinda não há avaliações
- Códigos G Empleados en Torno CNC Control GSK 2Documento2 páginasCódigos G Empleados en Torno CNC Control GSK 2javier medina71% (7)
- Codigos G y M para Torneado y Fresadora PDFDocumento6 páginasCodigos G y M para Torneado y Fresadora PDFJoss Zúñiga HernándezAinda não há avaliações
- Codigos G y M - Curso Basico FresadorasDocumento11 páginasCodigos G y M - Curso Basico FresadorasRobinson Coloma PizarroAinda não há avaliações
- Codigos FanucDocumento7 páginasCodigos FanucMario Sandoval100% (1)
- Aplicacion de Codigos GDocumento13 páginasAplicacion de Codigos GBoris SanhuezaAinda não há avaliações
- Códigos Iso Fagor 8085Documento7 páginasCódigos Iso Fagor 8085Jeans BedoyaAinda não há avaliações
- Ciclos de Trabago Codigos GDocumento18 páginasCiclos de Trabago Codigos GDaniel GalarzaAinda não há avaliações
- Codigos M y GDocumento3 páginasCodigos M y GmarcoAinda não há avaliações
- Formulario Examen 2017Documento19 páginasFormulario Examen 2017ElenaAinda não há avaliações
- PlaneadoDocumento12 páginasPlaneadoJuanTorresAinda não há avaliações
- Codigos Iso - FanucDocumento3 páginasCodigos Iso - FanucSebastian Moya RiveraAinda não há avaliações
- G00 en Este Codigo No Se Requiere ProgramacionDocumento6 páginasG00 en Este Codigo No Se Requiere ProgramacionalexauberAinda não há avaliações
- Traduccion Codigos CNCDocumento5 páginasTraduccion Codigos CNCedgardo saavedra herrera100% (1)
- Manual TecnicopDocumento241 páginasManual Tecnicoplolass88% (51)
- VW - 253 Inyeccion Directa de Gasolina Con Bosch Motronic Med 7Documento60 páginasVW - 253 Inyeccion Directa de Gasolina Con Bosch Motronic Med 7Agsinyeccion Electricidad Automotriz100% (5)
- Construcción de Un Entrenador Del Sistema de Inyección Diesel Cummins PTDocumento202 páginasConstrucción de Un Entrenador Del Sistema de Inyección Diesel Cummins PTMiguel Ángel Gil PérezAinda não há avaliações
- Cap 4Documento6 páginasCap 4Guillermo Rosas GonzalezAinda não há avaliações
- (Freon MO99) : Especificaciones DE LAS Garantías ComercialesDocumento2 páginas(Freon MO99) : Especificaciones DE LAS Garantías ComercialesRuben Dario Dorante RomeroAinda não há avaliações
- Hay Muchos Tipos de Efectos de Sonido en FL StudioDocumento8 páginasHay Muchos Tipos de Efectos de Sonido en FL StudioJuan Fernando Pocori Fernandez100% (1)
- TDR Puertas MaderaDocumento8 páginasTDR Puertas MaderaEdrOy Aguilar TaccaAinda não há avaliações
- Incrustaciones de PorcelanaDocumento3 páginasIncrustaciones de PorcelanaRocio AvilaAinda não há avaliações
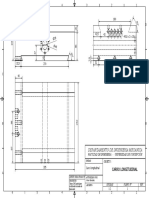
- Plano N°1 Carro LongitudinalDocumento1 páginaPlano N°1 Carro LongitudinalAlonso ATAinda não há avaliações
- Elaboracion de La Memoria de CalculoDocumento27 páginasElaboracion de La Memoria de CalculoPedro SgAinda não há avaliações
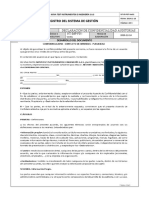
- NT-CR-F07 Declaración de Confidencialidad Auditorias 20201214Documento3 páginasNT-CR-F07 Declaración de Confidencialidad Auditorias 20201214Jose RomeroAinda não há avaliações
- Destajo FormatoDocumento4 páginasDestajo FormatoLORENA MARQUEZAinda não há avaliações
- BP11 - Instruccin de Rescate en AscensoresDocumento14 páginasBP11 - Instruccin de Rescate en AscensoresBeltran HéctorAinda não há avaliações
- Definición: Rubro: Aass-001 Excavación de Zanja para Tuberias Y Camaras de VálvulasDocumento263 páginasDefinición: Rubro: Aass-001 Excavación de Zanja para Tuberias Y Camaras de VálvulasEmma Luisa Jatar DiazAinda não há avaliações
- Hivec 2 Textbook - Spanish PDFDocumento31 páginasHivec 2 Textbook - Spanish PDFluischaconserinAinda não há avaliações
- Programa de Mantenimiento Sprinter Ncv3 Chasis 906.6Documento3 páginasPrograma de Mantenimiento Sprinter Ncv3 Chasis 906.6Ángela MárquezAinda não há avaliações
- Documento Acceso Consola Equipos BaDocumento9 páginasDocumento Acceso Consola Equipos BaCarlos MoratoAinda não há avaliações
- El Grado de Dureza de Los Pernos Es La Forma Técnica de Identificar La Resistencia Que Tiene El Material Del Cual Están Fabricados Los PernosDocumento5 páginasEl Grado de Dureza de Los Pernos Es La Forma Técnica de Identificar La Resistencia Que Tiene El Material Del Cual Están Fabricados Los PernosRoy Calani100% (1)
- Apuntes ElectromagnetismoDocumento9 páginasApuntes ElectromagnetismoEfraín de la CruzAinda não há avaliações
- Importancia de Los Cajeros Automáticos en El Sistema Financiero MundialDocumento1 páginaImportancia de Los Cajeros Automáticos en El Sistema Financiero MundialAna LuisaAinda não há avaliações
- Cuaderno de Ejercicios para El Periodo Del 08 Al 22 de FebreroDocumento10 páginasCuaderno de Ejercicios para El Periodo Del 08 Al 22 de FebreroAntonio Herrerías SanabriaAinda não há avaliações
- Quiz 75Documento4 páginasQuiz 75Andrea CastelblancoAinda não há avaliações
- Capitulo Ix. Principios de ElectricidadDocumento52 páginasCapitulo Ix. Principios de ElectricidadMarcelo ReyAinda não há avaliações
- Calculo Estructural de Puente Grua PDFDocumento16 páginasCalculo Estructural de Puente Grua PDFDanielle StephensAinda não há avaliações
- Analisis de CircuitosDocumento24 páginasAnalisis de CircuitosAdrián CordovaAinda não há avaliações
- Sed en Una Line (One Liners)Documento21 páginasSed en Una Line (One Liners)HAMMER19Ainda não há avaliações
- Molibdatos y WolframatosDocumento8 páginasMolibdatos y WolframatosJonathan BriceñoAinda não há avaliações
- Macro Excel Mantenimiento PreventivoDocumento97 páginasMacro Excel Mantenimiento PreventivoEdgar GaribayAinda não há avaliações
- NCh2121 1 1991 PDFDocumento9 páginasNCh2121 1 1991 PDFDiego VargasAinda não há avaliações
- EngelamientoDocumento26 páginasEngelamientogarzagaeAinda não há avaliações
- Plan de Ejecucion DuctosDocumento7 páginasPlan de Ejecucion DuctosKarla VelascoAinda não há avaliações
- Calculo Disponibilidad Contractual Alquiler de Equipos-RevmalvarezDocumento6 páginasCalculo Disponibilidad Contractual Alquiler de Equipos-Revmalvarezbranco chavezAinda não há avaliações
- Informe Final de Tarifas Pliego TarifarioDocumento2 páginasInforme Final de Tarifas Pliego TarifarioBryan BladimirAinda não há avaliações