Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- 2016 Ladakh BookDocumento9 páginas2016 Ladakh BookManoj ManivannanAinda não há avaliações
- Augmenting Disaggregated Electricity DataDocumento9 páginasAugmenting Disaggregated Electricity DataManoj ManivannanAinda não há avaliações
- Department of Energy: 2012, July 21th Written Test ofDocumento12 páginasDepartment of Energy: 2012, July 21th Written Test ofManoj ManivannanAinda não há avaliações
- Text PDFDocumento14 páginasText PDFManoj ManivannanAinda não há avaliações
- Thesis Abroad OpportunityDocumento1 páginaThesis Abroad OpportunityManoj ManivannanAinda não há avaliações
- Mech 6 To 8SEM27042010Documento46 páginasMech 6 To 8SEM27042010Mani VelAinda não há avaliações
- IELTS InformationDocumento8 páginasIELTS InformationSandeepAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- 20e - cTI-60t - TI Pin Converter: Blackhawk™ Jtag Pin ConvertersDocumento2 páginas20e - cTI-60t - TI Pin Converter: Blackhawk™ Jtag Pin ConvertersvspuriAinda não há avaliações
- Xdo XliffloaderDocumento7 páginasXdo XliffloaderRenuka ChavanAinda não há avaliações
- 3-Oracle Application Framework (OAF) Training Guide - EO, VO, Page, Query Region, LOV, PPRDocumento73 páginas3-Oracle Application Framework (OAF) Training Guide - EO, VO, Page, Query Region, LOV, PPRPreethi KishoreAinda não há avaliações
- ACI 308R-16 - Guide o External Curing - PreviewDocumento6 páginasACI 308R-16 - Guide o External Curing - PreviewHaniAmin0% (4)
- Lecture 3 Bending and Shear in Beams PHG A8 Oct17 PDFDocumento30 páginasLecture 3 Bending and Shear in Beams PHG A8 Oct17 PDFEvi32Ainda não há avaliações
- EC160B/180B/210B/240B/290B/360B/460B: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuDocumento31 páginasEC160B/180B/210B/240B/290B/360B/460B: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuMACHINERY101GEAR97% (71)
- Aluminum Design Manual 2015Documento505 páginasAluminum Design Manual 2015Charlie Henke100% (2)
- South Asia On ShortwaveDocumento15 páginasSouth Asia On ShortwaveKasi XswlAinda não há avaliações
- q64DA PDFDocumento1 páginaq64DA PDFSebastián LozadaAinda não há avaliações
- AISC Properties ViewerDocumento3 páginasAISC Properties ViewerrubenAinda não há avaliações
- Presentation 1Documento8 páginasPresentation 1JACKMAAAAAinda não há avaliações
- Vacuum Distillation (Ok)Documento112 páginasVacuum Distillation (Ok)Ahmed Mohamed Khalil100% (1)
- Adaptive Antenna Systems: Widrow, E. GoodeDocumento17 páginasAdaptive Antenna Systems: Widrow, E. GoodeKhal ZeratulAinda não há avaliações
- Question .Net CoreDocumento8 páginasQuestion .Net CorevdshfsdfhsdvAinda não há avaliações
- Parking BrakeDocumento16 páginasParking BrakeDat100% (1)
- Repair of Small Household Appliances and Power ToolsDocumento315 páginasRepair of Small Household Appliances and Power ToolsahmadnawazjaswalAinda não há avaliações
- Wolkite University Clearance SystemDocumento16 páginasWolkite University Clearance SystemZa Yâ Yâ80% (10)
- Sin EncoderDocumento6 páginasSin Encoderboynew87Ainda não há avaliações
- GP2500S/GP2501S - STN Color: Pro-Face Graphic Operator InterfacesDocumento2 páginasGP2500S/GP2501S - STN Color: Pro-Face Graphic Operator Interfacesthanh_cdt01Ainda não há avaliações
- Geographic Information System of Public Complaint Testing Based On Mobile WebDocumento2 páginasGeographic Information System of Public Complaint Testing Based On Mobile WebArya HardinataAinda não há avaliações
- 2014 Product Keys For Autodesk ProductsDocumento4 páginas2014 Product Keys For Autodesk ProductsNacer AssamAinda não há avaliações
- Application of Theory of Constraints in Health SystemsDocumento10 páginasApplication of Theory of Constraints in Health SystemszafarAinda não há avaliações
- Hustler Mini Z 44/52 Parts ManualDocumento125 páginasHustler Mini Z 44/52 Parts ManualGary0% (1)
- As204-80, As204-80Lf: Gaas Ic Sp4T Nonreflective Switch With Driver 300 Khz-3.5 GHZDocumento4 páginasAs204-80, As204-80Lf: Gaas Ic Sp4T Nonreflective Switch With Driver 300 Khz-3.5 GHZnjesraAinda não há avaliações
- Lane Departure Warning SystemDocumento7 páginasLane Departure Warning SystemRavisingh RajputAinda não há avaliações
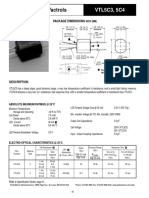
- Low Cost Axial Vactrols: VTL5C3, 5C4Documento2 páginasLow Cost Axial Vactrols: VTL5C3, 5C4sillyAinda não há avaliações
- Settling Tank DecantDocumento23 páginasSettling Tank Decantjvan migvelAinda não há avaliações
- Peri Up Flex Core ComponentsDocumento50 páginasPeri Up Flex Core ComponentsDavid BourcetAinda não há avaliações
- Introduction To Bounding Volume Hierarchies: Herman J. Haverkort 18 May 2004Documento9 páginasIntroduction To Bounding Volume Hierarchies: Herman J. Haverkort 18 May 2004Alessandro MeglioAinda não há avaliações
- Pvu-L0880er GaDocumento1 páginaPvu-L0880er GaarunghandwalAinda não há avaliações