Você também pode gostar
- Manual 3bps CT 803 03 23 Trilingue 1Documento91 páginasManual 3bps CT 803 03 23 Trilingue 1Joseilton SouzaAinda não há avaliações
- Aula 02.Documento37 páginasAula 02.Larisse SouzaAinda não há avaliações
- Aula 01Documento29 páginasAula 01Joseilton SouzaAinda não há avaliações
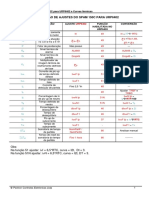
- Conversão de ajustes do SPAM 150C para URP6402 e curvas térmicasDocumento4 páginasConversão de ajustes do SPAM 150C para URP6402 e curvas térmicasJoseilton SouzaAinda não há avaliações
- Legenda: URP1439TUDocumento2 páginasLegenda: URP1439TUJoseilton SouzaAinda não há avaliações
- Aula0 Etica SP TE ATA MF 68844Documento36 páginasAula0 Etica SP TE ATA MF 68844Ademir Peixoto de AzevedoAinda não há avaliações
- Resultados Experimentais Dos Ensaios Da Maquinas Assincronas 2020-2eDocumento38 páginasResultados Experimentais Dos Ensaios Da Maquinas Assincronas 2020-2eJoseilton SouzaAinda não há avaliações
- Configuração Delta-Estrela do URP640xDocumento1 páginaConfiguração Delta-Estrela do URP640xJoseilton SouzaAinda não há avaliações
- Material - Custo de Capital - Eng. EconômicaDocumento30 páginasMaterial - Custo de Capital - Eng. EconômicaJoseilton SouzaAinda não há avaliações
- Exp - 05.2 - Lab. RemotoDocumento10 páginasExp - 05.2 - Lab. RemotoJoseilton SouzaAinda não há avaliações
- Experimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRADocumento12 páginasExperimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRAMatheus LeorAinda não há avaliações
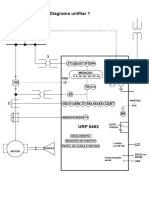
- Diagrama unifilar com detecção de fuga a terraDocumento2 páginasDiagrama unifilar com detecção de fuga a terraJoseilton SouzaAinda não há avaliações
- 08 CalibraçãoDocumento2 páginas08 CalibraçãoJoseilton SouzaAinda não há avaliações
- Curva 20 minutos anexoDocumento1 páginaCurva 20 minutos anexoJoseilton SouzaAinda não há avaliações
- Anexo 8 - Curva 30 MinutosDocumento1 páginaAnexo 8 - Curva 30 MinutosJoseilton SouzaAinda não há avaliações
- CN Terceira ListaDocumento1 páginaCN Terceira ListaJoseilton SouzaAinda não há avaliações
- ANEXO 4 A - Exemplo Esquema de Ligação 600x - r02 PDFDocumento2 páginasANEXO 4 A - Exemplo Esquema de Ligação 600x - r02 PDFalexbozz100% (1)
- ANEXO 4 A - Exemplo Esquema de Ligação 600x - r02 PDFDocumento2 páginasANEXO 4 A - Exemplo Esquema de Ligação 600x - r02 PDFalexbozz100% (1)
- CN QuartaLista 2020 1eDocumento2 páginasCN QuartaLista 2020 1eJoseilton SouzaAinda não há avaliações
- Aula 5 - CompetênciasDocumento12 páginasAula 5 - CompetênciasJoseilton SouzaAinda não há avaliações
- PowerNET P-600 G4 analisador portátilDocumento4 páginasPowerNET P-600 G4 analisador portátilJoseilton SouzaAinda não há avaliações
- Anexo 6 - Curva 10 MinutosDocumento1 páginaAnexo 6 - Curva 10 MinutosJoseilton SouzaAinda não há avaliações
- Cálculo Numérico: Métodos Iterativos para Encontrar Raízes de EquaçõesDocumento85 páginasCálculo Numérico: Métodos Iterativos para Encontrar Raízes de EquaçõesJoseilton SouzaAinda não há avaliações
- CN Segunda ListaDocumento2 páginasCN Segunda ListaJoseilton SouzaAinda não há avaliações
- Cálculo Numérico: Princípios FundamentaisDocumento22 páginasCálculo Numérico: Princípios FundamentaisJoseilton SouzaAinda não há avaliações
- Experimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRADocumento12 páginasExperimento Osciladores Senoidais - OPAMP - UFCG PROFESSOR GUTEMBERG LIRAMatheus LeorAinda não há avaliações
- Primeira ProvaDocumento1 páginaPrimeira ProvaJoseilton SouzaAinda não há avaliações
- Aula 9 Fourier Filtros Analise Sintese EspectralDocumento161 páginasAula 9 Fourier Filtros Analise Sintese EspectralJoseilton SouzaAinda não há avaliações
- Siqueira Guia MatLab para Alunos de Engenharia Eletrica Computacao e AutomacaoDocumento64 páginasSiqueira Guia MatLab para Alunos de Engenharia Eletrica Computacao e Automacaoaugusto_pires_1Ainda não há avaliações
- Aplicações do cristal de quartzo em eletrônicaDocumento150 páginasAplicações do cristal de quartzo em eletrônicaJoseilton SouzaAinda não há avaliações
- Erro Avaliação EscolarDocumento11 páginasErro Avaliação EscolarEvandro Scarpati100% (1)
- Chaveamento (2022) - Lucimara de MoraisDocumento17 páginasChaveamento (2022) - Lucimara de MoraisEdson Gria100% (2)
- Manual Maquina de Sorvete SOFT PDFDocumento43 páginasManual Maquina de Sorvete SOFT PDFAmauri Rogério100% (1)
- Psicologia Social e Comunitária: Família e Assistência SocialDocumento67 páginasPsicologia Social e Comunitária: Família e Assistência SocialThais BettinAinda não há avaliações
- Revestimento epóxi anticorrosivo de alto sólidosDocumento2 páginasRevestimento epóxi anticorrosivo de alto sólidosHelton JhonisAinda não há avaliações
- A Palavra FilosofiaDocumento2 páginasA Palavra FilosofiaRoberio OliveiraAinda não há avaliações
- O Espanto 10 - Atividades - Livre-ArbítrioDocumento15 páginasO Espanto 10 - Atividades - Livre-ArbítrioMariana GomesAinda não há avaliações
- Formação Internacional em CoachingDocumento160 páginasFormação Internacional em CoachingIzaque Moulaz100% (3)
- 1 I Despacho - Normativo 2019 01 02Documento5 páginas1 I Despacho - Normativo 2019 01 02Carlos LeiteAinda não há avaliações
- FNR de GafsaDocumento3 páginasFNR de GafsaJesus MarksAinda não há avaliações
- Notas Álgebra Linear CorrigidasDocumento36 páginasNotas Álgebra Linear CorrigidasRogerio FilhoAinda não há avaliações
- MTM AP Geometria Analítica Equações Da RetaDocumento7 páginasMTM AP Geometria Analítica Equações Da RetaIgorAinda não há avaliações
- Catalogo TMG IntegradaDocumento31 páginasCatalogo TMG IntegradaRodrigo SilvaAinda não há avaliações
- Problemas de Higiene AmbientalDocumento9 páginasProblemas de Higiene AmbientalAiuba ConstantinoAinda não há avaliações
- Nobreak SMS Sinus Triad 1200VADocumento6 páginasNobreak SMS Sinus Triad 1200VAFabio CesarAinda não há avaliações
- Manual da Leveza chacra raizDocumento124 páginasManual da Leveza chacra raizRoberto Santos100% (3)
- Barakibeel - Capítulo Do Livro "Nephilim" - de Caio FábioDocumento6 páginasBarakibeel - Capítulo Do Livro "Nephilim" - de Caio FábioMarcello CunhaAinda não há avaliações
- Prefeitura Municipal de Jaguaribara: JOACY ALVES DOS SANTOS JÚNIOR, No Uso de Suas AtribuiçõesDocumento72 páginasPrefeitura Municipal de Jaguaribara: JOACY ALVES DOS SANTOS JÚNIOR, No Uso de Suas AtribuiçõesThiago DinizAinda não há avaliações
- Ensino de associação Som-Comida em rato virtualDocumento4 páginasEnsino de associação Som-Comida em rato virtualHellen JordanAinda não há avaliações
- Fibonacci e ondas Elliott: padrões previsíveisDocumento16 páginasFibonacci e ondas Elliott: padrões previsíveisJorge JuniorAinda não há avaliações
- Exercicios Com Numeros ComplexosDocumento3 páginasExercicios Com Numeros Complexosnelson de oliveiraAinda não há avaliações
- Cadeias de referência e seus tiposDocumento2 páginasCadeias de referência e seus tiposAnonymous lSaukRMaAinda não há avaliações
- Mes 2Documento30 páginasMes 2Pierre MariaAinda não há avaliações
- Maquinas Fabrizzi - Orc0119094Documento1 páginaMaquinas Fabrizzi - Orc0119094Camila SimãoAinda não há avaliações
- Telhamento ou Trolhamento na MaçonariaDocumento4 páginasTelhamento ou Trolhamento na MaçonariaeulersalvaterraAinda não há avaliações
- Padrao de CoresDocumento3 páginasPadrao de CoresÉrick Bastos EmerichAinda não há avaliações
- Esquema Eletrico Gol Geração 4Documento7 páginasEsquema Eletrico Gol Geração 4LUCAS ALVESAinda não há avaliações
- História AntigaDocumento22 páginasHistória AntigaKarla TertulianoAinda não há avaliações
- Gestão de estoque de medicamentos na farmácia hospitalarDocumento19 páginasGestão de estoque de medicamentos na farmácia hospitalarJakeline AlvesAinda não há avaliações
- Grade de Horários Treinamento Alto Tiête AtualizadaDocumento13 páginasGrade de Horários Treinamento Alto Tiête AtualizadaCAPSi RECRIARAinda não há avaliações