Você também pode gostar
- Sistemas de Acionamento Elétrico com Motores CC e CADocumento14 páginasSistemas de Acionamento Elétrico com Motores CC e CAKaio FreitasAinda não há avaliações
- ArtigoMáquinas Janneson&JohnLennonDocumento6 páginasArtigoMáquinas Janneson&JohnLennonJohn SouzaAinda não há avaliações
- Motores elétricos monofásicos e acionamentosDocumento118 páginasMotores elétricos monofásicos e acionamentosLuis Alexandre TeixeiraAinda não há avaliações
- Apostila 1 - Motor CCDocumento12 páginasApostila 1 - Motor CCDiogoAinda não há avaliações
- Fundamentação teórica sobre funcionamento de motor elétrico CCDocumento6 páginasFundamentação teórica sobre funcionamento de motor elétrico CCVeve'h SantosAinda não há avaliações
- Geradores síncronos: princípio de funcionamento e tipos de rotoresDocumento56 páginasGeradores síncronos: princípio de funcionamento e tipos de rotoresMagno SilvaAinda não há avaliações
- Corrente transitória de partida em motor monofásico medidaDocumento4 páginasCorrente transitória de partida em motor monofásico medidaHébert VieiraAinda não há avaliações
- Relatório de experimento com motor síncrono e gerador CCDocumento9 páginasRelatório de experimento com motor síncrono e gerador CCBrenda Montes Cardoso FarahAinda não há avaliações
- Motor SincronoDocumento13 páginasMotor SincronoFelipe FreireAinda não há avaliações
- Motores monofásicos: estudo teórico e experimentalDocumento14 páginasMotores monofásicos: estudo teórico e experimentalThaymara ArantesAinda não há avaliações
- Lab 5 MCC P01 2014 Versao4Documento5 páginasLab 5 MCC P01 2014 Versao4Marco Antônio Silva PereiraAinda não há avaliações
- Gerador Sincrono Aula 1Documento53 páginasGerador Sincrono Aula 1Wembley OliveiraAinda não há avaliações
- Prática Maquinas Elétricas IDocumento40 páginasPrática Maquinas Elétricas IPaulo CardosoAinda não há avaliações
- Motores CC: Características e ComponentesDocumento48 páginasMotores CC: Características e Componentesmhulavas100% (1)
- Motores elétricos: tipos, partidas e controle de potênciaDocumento54 páginasMotores elétricos: tipos, partidas e controle de potênciaReginaldo CamposAinda não há avaliações
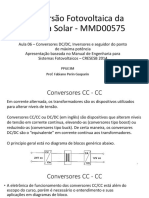
- Conversão Fotovoltaica: Conversores DC/DC, Inversores e MPPTDocumento47 páginasConversão Fotovoltaica: Conversores DC/DC, Inversores e MPPTManoel Henrique AlvesAinda não há avaliações
- 1º Tópico - Motores Elétricos e Dispositivos de Manobra e ProteçãoDocumento14 páginas1º Tópico - Motores Elétricos e Dispositivos de Manobra e ProteçãoProf. Bryan CupelloAinda não há avaliações
- Relatório Máquina CCDocumento29 páginasRelatório Máquina CCAdrian AlanAinda não há avaliações
- Máquinas CC: motores e geradores de corrente contínuaDocumento5 páginasMáquinas CC: motores e geradores de corrente contínuaGabriel Moura FagundesAinda não há avaliações
- IMT PPP Mar 2021 Parte 2Documento91 páginasIMT PPP Mar 2021 Parte 2frjosesantos4179Ainda não há avaliações
- Regulacao Da Velocidade de Motores C.ADocumento17 páginasRegulacao Da Velocidade de Motores C.ASadraque100% (3)
- Funcionamento do motor de corrente alternada e sistemas de partida eletromecânicaDocumento52 páginasFuncionamento do motor de corrente alternada e sistemas de partida eletromecânicaGabriel Vasconcelos NogueiraAinda não há avaliações
- Apostila de InversoresDocumento49 páginasApostila de InversoresLeandro SilvaAinda não há avaliações
- Relatório 7. Simulação Psim. Lourençoo e GarciaDocumento11 páginasRelatório 7. Simulação Psim. Lourençoo e GarciaEdson LourençoAinda não há avaliações
- RELATORIO 1 Ao 8 e 10Documento32 páginasRELATORIO 1 Ao 8 e 10Daniel reisAinda não há avaliações
- RESUMO Motores ElétricosDocumento34 páginasRESUMO Motores ElétricosLuís Felipe Schrir100% (1)
- Regulação de velocidade de motor CC acoplado a gerador de induçãoDocumento9 páginasRegulação de velocidade de motor CC acoplado a gerador de induçãoLaianaSeveriano PereiraAinda não há avaliações
- Controle de velocidade para motores CC usando PWMDocumento15 páginasControle de velocidade para motores CC usando PWMSilvio Gomes dos SantosAinda não há avaliações
- Maquinas EletricasDocumento44 páginasMaquinas EletricascrisfrgtAinda não há avaliações
- Desenvolvimento e Construção de Nobreak MonofasicoDocumento7 páginasDesenvolvimento e Construção de Nobreak MonofasicoLuan CrozattiAinda não há avaliações
- Máquinas de Corrente Contínua: tipos, componentes e circuitosDocumento39 páginasMáquinas de Corrente Contínua: tipos, componentes e circuitosasdias7Ainda não há avaliações
- Vantagens do capacitor na partida de motores monofásicosDocumento13 páginasVantagens do capacitor na partida de motores monofásicosMaikson TonattoAinda não há avaliações
- Motores CA e suas aplicaçõesDocumento141 páginasMotores CA e suas aplicaçõesBruno AlmeidaAinda não há avaliações
- Motores Elétricos - Classificação e FuncionamentoDocumento26 páginasMotores Elétricos - Classificação e FuncionamentoPaulo GonçalvesAinda não há avaliações
- Aula 03 - Máquinas Assíncronas de Indução TrifásicasDocumento51 páginasAula 03 - Máquinas Assíncronas de Indução TrifásicasanjgarAinda não há avaliações
- Ensaios em Máquina de Corrente ContínuaDocumento3 páginasEnsaios em Máquina de Corrente ContínuaZTE TREZEAinda não há avaliações
- Experimento 35Documento5 páginasExperimento 35Fernando CoroncAinda não há avaliações
- ServomotorDocumento3 páginasServomotorAlexandre PachecoAinda não há avaliações
- Exercícios - Máquinas Elétricas - Máquinas CC e InduçãoDocumento12 páginasExercícios - Máquinas Elétricas - Máquinas CC e InduçãoValencio AlvesAinda não há avaliações
- Aula 12 - Caracteristicas Gerais Dos MotoresDocumento38 páginasAula 12 - Caracteristicas Gerais Dos MotoresElione RodriguesAinda não há avaliações
- Motor universal CADocumento2 páginasMotor universal CALuiz FernandoAinda não há avaliações
- Automação IndustrialDocumento141 páginasAutomação IndustrialDante La PortaAinda não há avaliações
- Controle de velocidade de motores elétricos com inversores de frequênciaDocumento3 páginasControle de velocidade de motores elétricos com inversores de frequêncialipe caldasAinda não há avaliações
- Geradores CC: Características e ConfiguraçõesDocumento9 páginasGeradores CC: Características e ConfiguraçõescamilaAinda não há avaliações
- EXERCÍCIOS Gerador SíncronoDocumento13 páginasEXERCÍCIOS Gerador Síncrono3008 Bayma CA-HEAinda não há avaliações
- Conversão de Energia - ListaDocumento14 páginasConversão de Energia - ListaValdir EduardoAinda não há avaliações
- APOSTILA - Maquina - SincronaDocumento13 páginasAPOSTILA - Maquina - SincronaJhossy_98Ainda não há avaliações
- Atividade de Pesquisa - Acionamentos ElétricosDocumento5 páginasAtividade de Pesquisa - Acionamentos ElétricosFernando ChavesAinda não há avaliações
- Máquinas de corrente contínua: princípios e aplicaçõesDocumento14 páginasMáquinas de corrente contínua: princípios e aplicaçõesAlexandre PachecoAinda não há avaliações
- Maq EXCELENTEDocumento16 páginasMaq EXCELENTEStudyAinda não há avaliações
- Relatório 07 - EletricidadeDocumento15 páginasRelatório 07 - EletricidadeDaniel RodrigoAinda não há avaliações
- Técnico em eletrotécnica - exercícios de revisão para provaDocumento3 páginasTécnico em eletrotécnica - exercícios de revisão para provaRodrigo AndradeAinda não há avaliações
- Motor UniversalDocumento11 páginasMotor UniversalJONAS MOREIRA LIRA100% (1)
- Parâmetros de Motor de InduçãoDocumento14 páginasParâmetros de Motor de InduçãoJoão Victor PaivaAinda não há avaliações
- Motores Elétricos: Princípio e TiposDocumento15 páginasMotores Elétricos: Princípio e TiposAlessandro PaulinAinda não há avaliações
- Atividade Assíncrona 2 - Kaio FreitasDocumento13 páginasAtividade Assíncrona 2 - Kaio FreitasKaio FreitasAinda não há avaliações
- Específico PT provaDocumento3 páginasEspecífico PT provaRogerio SilvaAinda não há avaliações
- Apostila Motores CCDocumento24 páginasApostila Motores CCAndré Francy DalavechiaAinda não há avaliações
- Manual do Proprietário e GarantiaDocumento44 páginasManual do Proprietário e GarantiaVarinhas Do ValeAinda não há avaliações
- Catálogo de peças para tratores e implementos agrícolasDocumento100 páginasCatálogo de peças para tratores e implementos agrícolasprociênciaAinda não há avaliações
- Reversor Hidraúlico PDFDocumento25 páginasReversor Hidraúlico PDFFernando Sabino100% (2)
- 2013.09.26 - Lista de Aplicação de Veículos AntigosDocumento351 páginas2013.09.26 - Lista de Aplicação de Veículos AntigosSidney Costa VianaAinda não há avaliações
- COBRA NC 400 B (Sistema de Refrig Com Válvula Termost) - PTDocumento34 páginasCOBRA NC 400 B (Sistema de Refrig Com Válvula Termost) - PTDannillo ParreiraAinda não há avaliações
- Manual de Operação FT 3620 PT PDFDocumento163 páginasManual de Operação FT 3620 PT PDFJosé LeviAinda não há avaliações
- Máquinas térmicas UNIFACSDocumento24 páginasMáquinas térmicas UNIFACSDanilo AzevedoAinda não há avaliações
- Boletins - Seminários C.A.BDocumento31 páginasBoletins - Seminários C.A.Bautomaticosbrasil100% (3)
- Manual de Treinamento Jhon Deere Serie GDocumento232 páginasManual de Treinamento Jhon Deere Serie GThiago Santos91% (11)
- APLICAÇÃO de Filtros NHDocumento20 páginasAPLICAÇÃO de Filtros NHGustavo HonorioAinda não há avaliações
- LP CIE 7 Aluno 1ºBIMDocumento28 páginasLP CIE 7 Aluno 1ºBIMISADORA RAINHA DE CASTROAinda não há avaliações
- Sistema de combustível gerenciado eletronicamente em caminhões e ônibusDocumento21 páginasSistema de combustível gerenciado eletronicamente em caminhões e ônibusCleverson Jose Godinho88% (17)
- Conducao de EmpilhadoresDocumento83 páginasConducao de Empilhadoresteresa lagesAinda não há avaliações
- Manual instrução cortadora piso CPV-350/460Documento16 páginasManual instrução cortadora piso CPV-350/460jfn29Ainda não há avaliações
- Manual de Instruções Dce80Documento72 páginasManual de Instruções Dce80João Paulo MerloAinda não há avaliações
- Apostila de GeradoresDocumento15 páginasApostila de Geradoreslucasan38100% (1)
- Mercury Verado 350 SCi PDFDocumento105 páginasMercury Verado 350 SCi PDFFuad Gatti KouriAinda não há avaliações
- Tópico 2 - Principais ComponentesDocumento14 páginasTópico 2 - Principais ComponentesProf. Bryan CupelloAinda não há avaliações
- Colhedoras - CH570 - e - CH670 3Documento73 páginasColhedoras - CH570 - e - CH670 3Samuel BarrosAinda não há avaliações
- Motoenxada VitoDocumento76 páginasMotoenxada VitoguscribedAinda não há avaliações
- 14 CadernoDeProva Conhecimentos EspecíficosDocumento3 páginas14 CadernoDeProva Conhecimentos Específicos5qq72vq8ysAinda não há avaliações
- Kit Controle de Velocidade - Mu - Rev02Documento24 páginasKit Controle de Velocidade - Mu - Rev02Flaviano Guerra100% (1)
- Codigos de Erros UDocumento5 páginasCodigos de Erros UAlex SilvaAinda não há avaliações
- CentrífugasDocumento38 páginasCentrífugasMarcelo DiasAinda não há avaliações
- Catalogo BMC Escavadeira de Esteira R140LC 9SDocumento16 páginasCatalogo BMC Escavadeira de Esteira R140LC 9SHenrique SouzaAinda não há avaliações
- Colheitadeira S660Documento1.612 páginasColheitadeira S660Gustavo Juliano100% (2)
- t4 LP Tier 4a Brochure Portugal PTDocumento12 páginast4 LP Tier 4a Brochure Portugal PTdiogo.esteves.machrentAinda não há avaliações
- Esquema Eletricos Rele e Temporizador TravaDocumento74 páginasEsquema Eletricos Rele e Temporizador TravaDiego LorenzzoAinda não há avaliações
- ZX210LC Catálogo de Peças - P11133-P - CopDocumento569 páginasZX210LC Catálogo de Peças - P11133-P - CopKaio Davy100% (1)
- 12H Catálogo EDocumento20 páginas12H Catálogo EAndres Noriega100% (4)