Você também pode gostar
- PDFDocumento24 páginasPDFOlga Joy Labajo GerastaAinda não há avaliações
- MTH 375 HandoutDocumento67 páginasMTH 375 HandoutMuhammad Junaid Ali0% (1)
- A Study of Fuzzy & Intuitionistic Fuzzy Information MeasuresDocumento17 páginasA Study of Fuzzy & Intuitionistic Fuzzy Information MeasuresPratiksha TiwariAinda não há avaliações
- S210Documento86 páginasS210Sadullah AvdiuAinda não há avaliações
- Lecture 6 - Manufacturing Models and MetricsDocumento14 páginasLecture 6 - Manufacturing Models and Metricsjamunaa83Ainda não há avaliações
- MechVibration Lec1 PDFDocumento45 páginasMechVibration Lec1 PDFEngSafwanQadousAinda não há avaliações
- Applications of Variational Inequalities in Stochastic ControlNo EverandApplications of Variational Inequalities in Stochastic ControlNota: 2 de 5 estrelas2/5 (1)
- Chapter 1 P.GrooverDocumento33 páginasChapter 1 P.GrooverSeptiyan Adi NugrohoAinda não há avaliações
- CH 06Documento57 páginasCH 06khalil alhatabAinda não há avaliações
- LTCC and HTCC PDFDocumento3 páginasLTCC and HTCC PDFPhan Xuân TuấnAinda não há avaliações
- Design and Fabrication of 4 Straight Line MechanismsDocumento34 páginasDesign and Fabrication of 4 Straight Line MechanismsArunkuma81Ainda não há avaliações
- CH 7 Numerical ControlDocumento72 páginasCH 7 Numerical ControlJagmeet SinghAinda não há avaliações
- CIM LAB ManualDocumento58 páginasCIM LAB ManualBruce ColonAinda não há avaliações
- Methods Engineering & Layout PlanningDocumento40 páginasMethods Engineering & Layout PlanningTashi BestAinda não há avaliações
- Emerging TrendDocumento9 páginasEmerging TrendMahendra VarmanAinda não há avaliações
- Chapter 3 Manufacturing Metrics and EconomicsDocumento15 páginasChapter 3 Manufacturing Metrics and Economicstomocih624Ainda não há avaliações
- JNTUH Syllabus 2013 M.Tech CSEDocumento33 páginasJNTUH Syllabus 2013 M.Tech CSESRINIVASA RAO GANTAAinda não há avaliações
- Design Concepts: Software Engineering: A Practitioner's Approach, 7/eDocumento41 páginasDesign Concepts: Software Engineering: A Practitioner's Approach, 7/eSadaf Hameed100% (1)
- Industrial Automation Industrial Automation: Cad/Cam and CNCDocumento24 páginasIndustrial Automation Industrial Automation: Cad/Cam and CNCGuillermo RamirezAinda não há avaliações
- Build Mamdani Systems (GUI) : On This PageDocumento14 páginasBuild Mamdani Systems (GUI) : On This PageJESWAinda não há avaliações
- Digital Signal Processing Lab 5thDocumento31 páginasDigital Signal Processing Lab 5thMohsin BhatAinda não há avaliações
- 080 Manipulator Trajectory PlanningDocumento23 páginas080 Manipulator Trajectory PlanningJohan RojasAinda não há avaliações
- CAD/CAE Applications in BiomedicineDocumento12 páginasCAD/CAE Applications in BiomedicineManoj DhageAinda não há avaliações
- Unit-I - IntroductionDocumento75 páginasUnit-I - Introductionking mass100% (1)
- ANSYS Fracture SIF ExtractionDocumento18 páginasANSYS Fracture SIF ExtractioncasanovavnAinda não há avaliações
- P Grover 1Documento33 páginasP Grover 1Annisa Puspa MustikaAinda não há avaliações
- Review On Process Parameter Optimization For Forging ProcessDocumento3 páginasReview On Process Parameter Optimization For Forging ProcessIRJMETS JOURNALAinda não há avaliações
- Computer Aided Technologies Part - 1Documento18 páginasComputer Aided Technologies Part - 1Swarn KumarAinda não há avaliações
- Fe-Fe3C Phase Diagram ExplainedDocumento6 páginasFe-Fe3C Phase Diagram Explainedolid_zoneAinda não há avaliações
- Mesh-Intro 17.0 M05 Mesh Quality and Advanced TopicsDocumento39 páginasMesh-Intro 17.0 M05 Mesh Quality and Advanced Topicsjust randomAinda não há avaliações
- Smart Structures and Materials IntroductionDocumento11 páginasSmart Structures and Materials Introductionvishnu patilAinda não há avaliações
- FinalDocumento178 páginasFinalBiki JhaAinda não há avaliações
- 1 D Link Analysis of A Tapered Bar Using ANSYSDocumento21 páginas1 D Link Analysis of A Tapered Bar Using ANSYSAdityaChaurasiyaAinda não há avaliações
- CH 9 - Discrete Control Using PLC's and PC'sDocumento22 páginasCH 9 - Discrete Control Using PLC's and PC'sTehseenakhtarAinda não há avaliações
- Sand Casting: Automation, Production Systems, and Computer-Integrated Manufacturing, Third Edition, by Mikell P. GrooverDocumento38 páginasSand Casting: Automation, Production Systems, and Computer-Integrated Manufacturing, Third Edition, by Mikell P. GrooverShoaib HassanAinda não há avaliações
- Chapter4 PDFDocumento11 páginasChapter4 PDFAmirul AizadAinda não há avaliações
- WINSEM2022-23 MEE3502 ETH VL2022230500781 2022-12-21 Reference-Material-IDocumento24 páginasWINSEM2022-23 MEE3502 ETH VL2022230500781 2022-12-21 Reference-Material-IwewewewAinda não há avaliações
- Computer-Aided Engineering (CAE) Is The Broad Usage of ComputerDocumento4 páginasComputer-Aided Engineering (CAE) Is The Broad Usage of ComputerDavid AlexAinda não há avaliações
- Developing Sound Package Treatments For A Vehicle PDFDocumento7 páginasDeveloping Sound Package Treatments For A Vehicle PDFmicky1389Ainda não há avaliações
- Alberty-Matlab Implementation of Fem in ElasticityDocumento25 páginasAlberty-Matlab Implementation of Fem in ElasticityRick HunterAinda não há avaliações
- CNC CAM Lecture Notes Chapter 3 InterpolatorDocumento32 páginasCNC CAM Lecture Notes Chapter 3 InterpolatorSutran ErwiyantoroAinda não há avaliações
- Lecture 2-HypermeshDocumento37 páginasLecture 2-Hypermeshkashish4u100% (1)
- Me 445 Groover Ch8 Industrial RoboticsDocumento39 páginasMe 445 Groover Ch8 Industrial RoboticsSergio LedezmaAinda não há avaliações
- Design Analysis and AlgorithmDocumento78 páginasDesign Analysis and AlgorithmShivam Singhal100% (1)
- LaplaceTransform and System StabilityDocumento30 páginasLaplaceTransform and System Stabilityhamza abdo mohamoudAinda não há avaliações
- Project Report SpecimenDocumento38 páginasProject Report SpecimenamuAinda não há avaliações
- Vibration Midterm 2012Documento2 páginasVibration Midterm 2012Aravind KumarAinda não há avaliações
- 01 Modelling and SimulationDocumento18 páginas01 Modelling and SimulationMuslihAinda não há avaliações
- MotionControlTerminologyPrimerv2 PDFDocumento2 páginasMotionControlTerminologyPrimerv2 PDFFouad ElhajjiAinda não há avaliações
- 02 Basic 3D MagnetostaticTutorialDocumento102 páginas02 Basic 3D MagnetostaticTutorialEnmel Martínez BejaranoAinda não há avaliações
- CIM Lecture Notes 12Documento13 páginasCIM Lecture Notes 12Babatunde Victor JuniorAinda não há avaliações
- W9 Engine ProjectDocumento58 páginasW9 Engine ProjectSuraj SahooAinda não há avaliações
- Shape and Cross Section Optimisation of A Truss StructureDocumento15 páginasShape and Cross Section Optimisation of A Truss StructureAakash Mohan100% (1)
- Operations Research SyllabusDocumento2 páginasOperations Research SyllabusKiruba ShankerAinda não há avaliações
- Computational method for designing wind turbine bladesDocumento5 páginasComputational method for designing wind turbine bladesMaurício SoaresAinda não há avaliações
- AA V1 I1 PCG Lanczos EigensolverDocumento2 páginasAA V1 I1 PCG Lanczos EigensolverPasquale ColantuonoAinda não há avaliações
- EECE 301 Note Set 10 CT ConvolutionDocumento11 páginasEECE 301 Note Set 10 CT ConvolutionrodriguesvascoAinda não há avaliações
- Quantitative Analysis of FMSDocumento13 páginasQuantitative Analysis of FMSAbrarIraziqYatemee100% (1)
- Unit Ii 9: SyllabusDocumento12 páginasUnit Ii 9: SyllabusbeingniceAinda não há avaliações
- Lesson PlanDocumento1 páginaLesson PlansiswariyaAinda não há avaliações
- Class TestDocumento11 páginasClass TestsiswariyaAinda não há avaliações
- Oracle 2 EBDocumento6 páginasOracle 2 EBsiswariyaAinda não há avaliações
- UntitledDocumento13 páginasUntitledsiswariyaAinda não há avaliações
- BFS Lecture: Shortest Paths Using Breadth-First SearchDocumento26 páginasBFS Lecture: Shortest Paths Using Breadth-First SearchsiswariyaAinda não há avaliações
- Lenvica Attend HRMDocumento90 páginasLenvica Attend HRMrattar_azam75Ainda não há avaliações
- Asynchronous Transfer Mode: Networks: ATM 1Documento32 páginasAsynchronous Transfer Mode: Networks: ATM 1saisushmaAinda não há avaliações
- Mathematical Inductions and Binomial TheoremDocumento18 páginasMathematical Inductions and Binomial TheoremMuhammad HamidAinda não há avaliações
- DSA Sheet by Arsh (45 Days Plan) - Sheet1Documento7 páginasDSA Sheet by Arsh (45 Days Plan) - Sheet1Kriti ChawreAinda não há avaliações
- 5385 HW 3Documento1 página5385 HW 3Alex PanAinda não há avaliações
- DIRECTED GRAPH CHAPTER 4 KEY CONCEPTSDocumento42 páginasDIRECTED GRAPH CHAPTER 4 KEY CONCEPTSIra LyanaAinda não há avaliações
- Recursion: Data Structures and Algorithms in Java 1/25Documento25 páginasRecursion: Data Structures and Algorithms in Java 1/25Tryer0% (1)
- Binary Search Tree PDFDocumento26 páginasBinary Search Tree PDFCriptosy Criptosy CriptoAinda não há avaliações
- NewtonGATE Test 1-Polynomials and Real NumbersDocumento2 páginasNewtonGATE Test 1-Polynomials and Real NumbersAntara NagAinda não há avaliações
- Generalized addition chains for arbitrary fixed gDocumento13 páginasGeneralized addition chains for arbitrary fixed gIan G. WalkerAinda não há avaliações
- DAA Unit Wise Importtant QuestionsDocumento2 páginasDAA Unit Wise Importtant QuestionsAditya Krishna100% (4)
- MCQs UNIT I - Indices, Logarithm, AP & GPDocumento2 páginasMCQs UNIT I - Indices, Logarithm, AP & GPhimanshugupta6Ainda não há avaliações
- Sudoku Squares and Chromatic Polynomials: Agnes M. Herzberg and M. Ram MurtyDocumento10 páginasSudoku Squares and Chromatic Polynomials: Agnes M. Herzberg and M. Ram MurtySamuel SilvaAinda não há avaliações
- Mthematical Library MethodsDocumento30 páginasMthematical Library MethodsAshwini KSAinda não há avaliações
- Graph Theory Text BookDocumento178 páginasGraph Theory Text BookPavan Kumar P.N.V.S.Ainda não há avaliações
- Chapter 7-1: Signature SchemesDocumento37 páginasChapter 7-1: Signature SchemesMARIA AL-ABBADIAinda não há avaliações
- Grade6 Full Year 6th Grade Review PDFDocumento10 páginasGrade6 Full Year 6th Grade Review PDFEduGainAinda não há avaliações
- Dinesh Khattar - Quantitative Aptitude For Campus Interview Vol I-Pearson Education (2016)Documento444 páginasDinesh Khattar - Quantitative Aptitude For Campus Interview Vol I-Pearson Education (2016)Rough WorkAinda não há avaliações
- ERA2010 Conference ListDocumento136 páginasERA2010 Conference Listasif1253Ainda não há avaliações
- Real Number Factors and CompositesDocumento12 páginasReal Number Factors and CompositesDivyanshu SinghAinda não há avaliações
- Elementary Number TheoryDocumento59 páginasElementary Number Theory顾星Ainda não há avaliações
- Exercises On Quadratic FunctionsDocumento4 páginasExercises On Quadratic FunctionsChris Vir JavierAinda não há avaliações
- Laplace TableDocumento2 páginasLaplace TableNirav patelAinda não há avaliações
- Number Theory - Concepts and ProblemsDocumento3 páginasNumber Theory - Concepts and ProblemsjilkAinda não há avaliações
- Context-Free Grammars and Regular LanguagesDocumento16 páginasContext-Free Grammars and Regular LanguagesMohan DevaAinda não há avaliações
- Kruskals PrimsDocumento18 páginasKruskals PrimsSunil KumarAinda não há avaliações
- Gate Successful Ques PDFDocumento26 páginasGate Successful Ques PDFSureshAinda não há avaliações
- Introduction To Algorithms Md. Asif Bin KhaledDocumento26 páginasIntroduction To Algorithms Md. Asif Bin KhaledSharmin Islam ShroddhaAinda não há avaliações
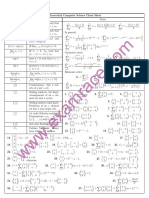
- Computer Science FormulasDocumento10 páginasComputer Science FormulasSheeraz AhmedAinda não há avaliações
- Combinatorics WikipediaDocumento409 páginasCombinatorics WikipediaJames LanhamAinda não há avaliações
- DodoDocumento3 páginasDodoAman ChaurishiyaAinda não há avaliações
- Booth MultiplierDocumento5 páginasBooth Multiplierrahul rAinda não há avaliações