Você também pode gostar
- Field Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveDocumento8 páginasField Oriented Control For Space Vector Modulation Based Brushless DC Motor DriveSushant MandalAinda não há avaliações
- Jacob 2016Documento7 páginasJacob 2016TrơNhưNitơAinda não há avaliações
- Position Sensorless Control Without Phase Shifter ForDocumento13 páginasPosition Sensorless Control Without Phase Shifter ForRiad BOUZIDIAinda não há avaliações
- A Novel Position Sensorless Control Method For Brushless DC MotorsDocumento8 páginasA Novel Position Sensorless Control Method For Brushless DC MotorsMuhammad Yusuf IrdandyAinda não há avaliações
- A New Approach To Sensorless Control Method For BRDocumento12 páginasA New Approach To Sensorless Control Method For BRLê Quốc ViệtAinda não há avaliações
- Self-Correction of Commutation Point For High-Speed Sensor Less BLDC Motor With Low Inductance and Non Ideal Back EMFDocumento10 páginasSelf-Correction of Commutation Point For High-Speed Sensor Less BLDC Motor With Low Inductance and Non Ideal Back EMFKhaleel MohammadAinda não há avaliações
- New Sensor LessDocumento10 páginasNew Sensor LessAbhishek AgarwalAinda não há avaliações
- Sensorless Control of A Brushless DC MotorDocumento7 páginasSensorless Control of A Brushless DC MotorTrong LeAinda não há avaliações
- High Performance Nonsalient Sensorless BLDC Motor Control Strategy From Standstill To High SpeedDocumento11 páginasHigh Performance Nonsalient Sensorless BLDC Motor Control Strategy From Standstill To High SpeedSUMAN PAULAinda não há avaliações
- Direct Torque Control of Brushless DC Motor: With Non-Sinusoidal Back-EMFDocumento7 páginasDirect Torque Control of Brushless DC Motor: With Non-Sinusoidal Back-EMFGenaro Bessa CeppoAinda não há avaliações
- Sensorless Commutation Tuning Based Speed Control of BLDC MotorDocumento8 páginasSensorless Commutation Tuning Based Speed Control of BLDC Motornecke94Ainda não há avaliações
- A Current Index Approach To Compensate Commutation Phase Error For Sensorless Brushless DC Motors With Nonideal Back EMFDocumento11 páginasA Current Index Approach To Compensate Commutation Phase Error For Sensorless Brushless DC Motors With Nonideal Back EMFSUMAN PAULAinda não há avaliações
- A Wide Speed Range Sensorless Control Technique ofDocumento12 páginasA Wide Speed Range Sensorless Control Technique ofVinay KashyapAinda não há avaliações
- Sensorless Speed Control of Brushless DCDocumento5 páginasSensorless Speed Control of Brushless DCekrem kayaAinda não há avaliações
- Fast Regulation Method For Commutation Shifts For Sensorless Brushless DC MotorsDocumento13 páginasFast Regulation Method For Commutation Shifts For Sensorless Brushless DC MotorsМихаил ВикторовичAinda não há avaliações
- The International Journal of Science & TechnoledgeDocumento6 páginasThe International Journal of Science & TechnoledgehakikAinda não há avaliações
- Filterless and Sensorless Commutation Method For BLDC MotorsDocumento13 páginasFilterless and Sensorless Commutation Method For BLDC MotorsPeter MüllerAinda não há avaliações
- UNIT 5 InvertersDocumento15 páginasUNIT 5 InverterssavitaAinda não há avaliações
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocumento5 páginasSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalAinda não há avaliações
- Using Self-Driven AC-DC Synchronous Rectifier As A Direct Replacement For Traditional Power Diode RectifierDocumento10 páginasUsing Self-Driven AC-DC Synchronous Rectifier As A Direct Replacement For Traditional Power Diode RectifierdabalejoAinda não há avaliações
- 2016 - Wavelet Packet Decomposition-Based Fault Diagnosis Scheme For SRM Drives With A Single Current SensorDocumento11 páginas2016 - Wavelet Packet Decomposition-Based Fault Diagnosis Scheme For SRM Drives With A Single Current Sensorsgw.sgwAinda não há avaliações
- A New Torque Control Method For Torque Ripple Minimization of BLDC Motors With Un-Ideal Back EMFDocumento9 páginasA New Torque Control Method For Torque Ripple Minimization of BLDC Motors With Un-Ideal Back EMFPradeepChandraVarmaMandapatiAinda não há avaliações
- Modelling and Control of A Novel Zero-Current-Switching Inverter With Sinusoidal Current OutputDocumento11 páginasModelling and Control of A Novel Zero-Current-Switching Inverter With Sinusoidal Current OutputSuresh KumarAinda não há avaliações
- However, Only,: StatedDocumento6 páginasHowever, Only,: StatedRaja RJAinda não há avaliações
- Basic BLDC ControllerDocumento9 páginasBasic BLDC ControllerRen KiyoshiiAinda não há avaliações
- EKF Applied To BLDCDocumento9 páginasEKF Applied To BLDCUma SathyadevanAinda não há avaliações
- An Introduction To Brushless DC Motor ControlDocumento33 páginasAn Introduction To Brushless DC Motor ControlIgor TrimcevskiAinda não há avaliações
- Fuzzy - Microsoft Word - IJEST11-03-10-070Documento8 páginasFuzzy - Microsoft Word - IJEST11-03-10-0702K18/EE/244 VIPESH DUNKWALAinda não há avaliações
- BLDC Sepic Motor Torque ControlDocumento60 páginasBLDC Sepic Motor Torque ControlSuresh SsbnAinda não há avaliações
- Thesis On Switched Reluctance MotorDocumento4 páginasThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- Proposal of LocusDocumento4 páginasProposal of LocusRam NepaliAinda não há avaliações
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocumento5 páginasDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourAinda não há avaliações
- Analysis and Mitigation of Torsional Vibration of PM BrushlessDocumento11 páginasAnalysis and Mitigation of Torsional Vibration of PM Brushlessதிருலோகசங்கர் தேAinda não há avaliações
- Analysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. KarkarDocumento4 páginasAnalysis of Open Loop Speed Control of Brushless DC Motor: Kajal D. Parsana, Hitesh M. Karkarngnr_gull1952Ainda não há avaliações
- Ramesh 2011Documento6 páginasRamesh 2011Hoang Hoang LeAinda não há avaliações
- 5sensorlessBLDC PDFDocumento7 páginas5sensorlessBLDC PDFAlex CastilloAinda não há avaliações
- Brushed DC Sensorless FeedbackDocumento3 páginasBrushed DC Sensorless FeedbackHoon Miew JieAinda não há avaliações
- MPC Rizado TorqueDocumento6 páginasMPC Rizado TorquesebastianG1995Ainda não há avaliações
- Energies: Vectorized Mathematical Model of A Slip-Ring Induction MotorDocumento20 páginasEnergies: Vectorized Mathematical Model of A Slip-Ring Induction MotorYugendran KumaravelAinda não há avaliações
- Position-Sensorless Method For Electric Braking Commutation of Brushless DC MachinesDocumento13 páginasPosition-Sensorless Method For Electric Braking Commutation of Brushless DC MachinesMalikAlrahabiAinda não há avaliações
- New Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesDocumento13 páginasNew Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesKhalid HarounAinda não há avaliações
- A Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFDocumento9 páginasA Review Paper On Torque Ripple Reduction and Power Quality Improvement in Brushless DC Motor PDFsethukumarkAinda não há avaliações
- PWM Switching Strategy For Torque Ripple Minimization in BLDC MotorDocumento6 páginasPWM Switching Strategy For Torque Ripple Minimization in BLDC MotorekaliappanAinda não há avaliações
- DSP Based Sensorless Control of A BLDC Motor WithDocumento6 páginasDSP Based Sensorless Control of A BLDC Motor WithSanket ParikhAinda não há avaliações
- A New Robust Speed-Sensorless Control StrategyDocumento13 páginasA New Robust Speed-Sensorless Control StrategyJean-Sébastien FromontAinda não há avaliações
- 72-A Switched-Capacitor Three-Phase ACAC ConverterDocumento11 páginas72-A Switched-Capacitor Three-Phase ACAC ConverterJoão GimenesAinda não há avaliações
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocumento5 páginasDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarAinda não há avaliações
- Sensorless BLDC ControlDocumento36 páginasSensorless BLDC ControlPaolo TripicchioAinda não há avaliações
- Fpga Based Indirect Position Detection and Speed Control of PMBLDC - Journals456 PDFDocumento7 páginasFpga Based Indirect Position Detection and Speed Control of PMBLDC - Journals456 PDFhieuhuech10% (1)
- Solid-Rotor Induction Motor Modeling Based On CircDocumento16 páginasSolid-Rotor Induction Motor Modeling Based On CircIraqi stormAinda não há avaliações
- Sensorless Control of Permanent Magnet AC Motors: October 1994Documento7 páginasSensorless Control of Permanent Magnet AC Motors: October 1994Ismail BayraktarAinda não há avaliações
- Vector Controller Based Speed Control of Induction Motor Drive With 3-Level SVPWM Based Inverter PDFDocumento11 páginasVector Controller Based Speed Control of Induction Motor Drive With 3-Level SVPWM Based Inverter PDF1balamanianAinda não há avaliações
- CRW 367-373Documento7 páginasCRW 367-373amrrefkyAinda não há avaliações
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocumento7 páginasDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Improved Finite Control-Set Model-Based Direct Power Control of BLDC Motor With Reduced Torque RippleDocumento9 páginasImproved Finite Control-Set Model-Based Direct Power Control of BLDC Motor With Reduced Torque RippleOscar Olarte OrtizAinda não há avaliações
- Active Rectification SynchronousDocumento11 páginasActive Rectification SynchronousDONG SANJEEVAinda não há avaliações
- KiranDocumento20 páginasKiranabhishek mAinda não há avaliações
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNo EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNota: 5 de 5 estrelas5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNota: 2 de 5 estrelas2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetAinda não há avaliações
- Dynamic Spectrum Allocation in Wireless Cognitive Sensor Networks: Improving Fairness and Energy EfficiencyDocumento5 páginasDynamic Spectrum Allocation in Wireless Cognitive Sensor Networks: Improving Fairness and Energy EfficiencyUmai BalanAinda não há avaliações
- 04153344Documento6 páginas04153344Umai BalanAinda não há avaliações
- Power Management Solutions For Energy Management, Power Quality and Environment Using Battery Energy Storage SystemsDocumento1 páginaPower Management Solutions For Energy Management, Power Quality and Environment Using Battery Energy Storage SystemsUmai BalanAinda não há avaliações
- A Self Adaptable Intelligent Battery Charger For Portable ElectronicsDocumento5 páginasA Self Adaptable Intelligent Battery Charger For Portable ElectronicsUmai BalanAinda não há avaliações
- (Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)Documento66 páginas(Ebook - Electronics) - Principles of PLL - Tutorial (Kroupa 2000)양종렬Ainda não há avaliações
- Software TestingDocumento4 páginasSoftware TestingX DevilXAinda não há avaliações
- Samsung CodesDocumento14 páginasSamsung Codesapi-3738581100% (2)
- Exterior Perspective 1: PasuquinDocumento1 páginaExterior Perspective 1: Pasuquinjay-ar barangayAinda não há avaliações
- 1.1 Control Philosophy CAS-1 NMDCDocumento36 páginas1.1 Control Philosophy CAS-1 NMDCkoushik42000Ainda não há avaliações
- Limak 2017 Annual ReportDocumento122 páginasLimak 2017 Annual Reportorcun_ertAinda não há avaliações
- TabulationDocumento13 páginasTabulationWildan PushAinda não há avaliações
- Simple and Compound Gear TrainDocumento2 páginasSimple and Compound Gear TrainHendri Yoga SaputraAinda não há avaliações
- Meitrack Gprs Protocol v1.6Documento45 páginasMeitrack Gprs Protocol v1.6monillo123Ainda não há avaliações
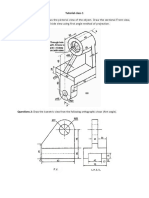
- Tutorial Class 1 Questions 1Documento2 páginasTutorial Class 1 Questions 1Bố Quỳnh ChiAinda não há avaliações
- Particle Swarm Optimization - WikipediaDocumento9 páginasParticle Swarm Optimization - WikipediaRicardo VillalongaAinda não há avaliações
- Photosynthesis LabDocumento3 páginasPhotosynthesis Labapi-276121304Ainda não há avaliações
- Kaltreparatur-Textil WT2332 enDocumento20 páginasKaltreparatur-Textil WT2332 enFerAK47aAinda não há avaliações
- Abstract of ASTM F1470 1998Documento7 páginasAbstract of ASTM F1470 1998Jesse ChenAinda não há avaliações
- ZXComputingDocumento100 páginasZXComputingozzy75Ainda não há avaliações
- Cold Rolled Steel Sheet-JFE PDFDocumento32 páginasCold Rolled Steel Sheet-JFE PDFEduardo Javier Granados SanchezAinda não há avaliações
- Oracle E-Business Suite Release 12.2.6 Readme (Doc ID 2114016.1)Documento18 páginasOracle E-Business Suite Release 12.2.6 Readme (Doc ID 2114016.1)KingAinda não há avaliações
- Jun SMSDocumento43 páginasJun SMSgallardo0121Ainda não há avaliações
- Astm F 30 - 96 R02 - RJMWDocumento5 páginasAstm F 30 - 96 R02 - RJMWphaindikaAinda não há avaliações
- Heat Rate Calc in ExcelDocumento13 páginasHeat Rate Calc in ExcelMukesh VadaliaAinda não há avaliações
- Misc Forrester SAP Competence CenterDocumento16 páginasMisc Forrester SAP Competence CenterManuel ParradoAinda não há avaliações
- Droop Vs Iso Control Modes For Gas TurbinesDocumento3 páginasDroop Vs Iso Control Modes For Gas TurbinesArdvark100% (1)
- Cable Ties DatasheetDocumento7 páginasCable Ties DatasheetGovind ChaudhariAinda não há avaliações
- Bell Desk-2Documento96 páginasBell Desk-2Arrow PrasadAinda não há avaliações
- Shock AbsorberDocumento0 páginaShock AbsorberSahaya GrinspanAinda não há avaliações
- Practice Exam 1Documento7 páginasPractice Exam 1425Ainda não há avaliações
- Ilovepdf Merged MergedDocumento209 páginasIlovepdf Merged MergedDeepak AgrawalAinda não há avaliações
- Crisfield - Vol1 - NonLinear Finite Element Analysis of Solids and Structures EssentialsDocumento360 páginasCrisfield - Vol1 - NonLinear Finite Element Analysis of Solids and Structures EssentialsAnonymous eCD5ZRAinda não há avaliações
- Yucca Mountain Safety Evaluation Report - Volume 2Documento665 páginasYucca Mountain Safety Evaluation Report - Volume 2The Heritage FoundationAinda não há avaliações
- Cinegy User ManualDocumento253 páginasCinegy User ManualNizamuddin KaziAinda não há avaliações