Você também pode gostar
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Belgas T2000EP IOMDocumento4 páginasBelgas T2000EP IOMSMcAinda não há avaliações
- Installation and Operation Instructions For Custom Mark III CP Series Oil Fired UnitNo EverandInstallation and Operation Instructions For Custom Mark III CP Series Oil Fired UnitAinda não há avaliações
- Manual Posicionador Power GenexDocumento2 páginasManual Posicionador Power Genexrexxxx987Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Electro-Pneumatic Positioner EPL Series: Instruction ManualDocumento8 páginasElectro-Pneumatic Positioner EPL Series: Instruction ManualSimbu ArasanAinda não há avaliações
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGAinda não há avaliações
- T 1000 ManualDocumento6 páginasT 1000 ManualCeleste PrantlAinda não há avaliações
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsAinda não há avaliações
- Type 1000 Transducer Product Instructions: Principle of OperationDocumento6 páginasType 1000 Transducer Product Instructions: Principle of OperationEdge-TecAinda não há avaliações
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesAinda não há avaliações
- Electro/Pneumatic Valve Positioners (P3300)Documento6 páginasElectro/Pneumatic Valve Positioners (P3300)workt1meAinda não há avaliações
- 110 Waveform Generator Projects for the Home ConstructorNo Everand110 Waveform Generator Projects for the Home ConstructorNota: 4 de 5 estrelas4/5 (1)
- Transductor FLOWSERVE NT3000Documento20 páginasTransductor FLOWSERVE NT3000Xavier EspinozaAinda não há avaliações
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignNo EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignAinda não há avaliações
- T83840en PDFDocumento6 páginasT83840en PDFshareyhou100% (1)
- Calibration Procedure For Digital Multimeter, An - psm-45 and (Simpson, Model 467) and Simpson, Model 467e - Tb-9-6625-2353-24Documento15 páginasCalibration Procedure For Digital Multimeter, An - psm-45 and (Simpson, Model 467) and Simpson, Model 467e - Tb-9-6625-2353-24luroguitaAinda não há avaliações
- D Ape Av1234 - FDocumento24 páginasD Ape Av1234 - FAngel FortuneAinda não há avaliações
- Arca Valve Manual - 830 POSITIONERDocumento13 páginasArca Valve Manual - 830 POSITIONERAtul bhabad0% (1)
- Ca3140, Ca3140A: 4.5Mhz, Bimos Operational Amplifier With Mosfet Input/Bipolar Output FeaturesDocumento19 páginasCa3140, Ca3140A: 4.5Mhz, Bimos Operational Amplifier With Mosfet Input/Bipolar Output FeaturesRicardo Teixeira de AbreuAinda não há avaliações
- Masoneilan 8012 8013 FactSheet 0612Documento8 páginasMasoneilan 8012 8013 FactSheet 0612Omar ChaoukiAinda não há avaliações
- PositionerDocumento13 páginasPositionerLeonidas PetrouAinda não há avaliações
- CA3140Documento20 páginasCA3140Brzata PticaAinda não há avaliações
- 315 - SVP3000 Alphaplus S HART Protokolom PDFDocumento12 páginas315 - SVP3000 Alphaplus S HART Protokolom PDFJuan Carlos Nodner RiosAinda não há avaliações
- Sor Adjustable Dead Band Pressure SwitchDocumento16 páginasSor Adjustable Dead Band Pressure SwitchAdam SamyAinda não há avaliações
- Manual Valvula Divisora Comb LiqDocumento20 páginasManual Valvula Divisora Comb Liqdaniel triana palciosAinda não há avaliações
- Electro Pneumatic EN40Documento5 páginasElectro Pneumatic EN40Harold David VillacísAinda não há avaliações
- 2.5V and 4.096V Voltage References: Features DescriptionDocumento20 páginas2.5V and 4.096V Voltage References: Features Descriptionikaro181083Ainda não há avaliações
- SFA350 :: ROAL Living EnergyDocumento6 páginasSFA350 :: ROAL Living EnergyroalscribdAinda não há avaliações
- Admiral TKF3400A (Manual)Documento24 páginasAdmiral TKF3400A (Manual)crisarg_10Ainda não há avaliações
- Alpha 400 - 600Documento6 páginasAlpha 400 - 600alain_coAinda não há avaliações
- AVR3AVR4IODocumento12 páginasAVR3AVR4IOk OAinda não há avaliações
- Series 3730 Electropneumatic Positioner Type 3730-1: ApplicationDocumento6 páginasSeries 3730 Electropneumatic Positioner Type 3730-1: ApplicationGuillermo A OMAinda não há avaliações
- MPX4115 (Sensor Presion)Documento10 páginasMPX4115 (Sensor Presion)Ricardo Xavier Otazo LópezAinda não há avaliações
- RP10 e PDFDocumento7 páginasRP10 e PDFTestronicpartsAinda não há avaliações
- Perkins P200Documento4 páginasPerkins P200PaulusIwanAinda não há avaliações
- MPX5010Documento16 páginasMPX5010Arsonval FleuryAinda não há avaliações
- LIPU - Valve PDFDocumento71 páginasLIPU - Valve PDFLê Trung Kiên100% (1)
- Posicionador Neumatico Somas PDFDocumento4 páginasPosicionador Neumatico Somas PDFJosé Manuel GonzálezAinda não há avaliações
- TV LG 21fu1rDocumento16 páginasTV LG 21fu1rpurwants100% (1)
- Type 646 Electro-PneumaticDocumento6 páginasType 646 Electro-PneumaticjplutodAinda não há avaliações
- MFA160 :: ROAL Living EnergyDocumento5 páginasMFA160 :: ROAL Living EnergyroalscribdAinda não há avaliações
- PTN 78020 WDocumento27 páginasPTN 78020 WabrrielAinda não há avaliações
- MPX5100Documento17 páginasMPX5100Andri PaoAinda não há avaliações
- EJA530EDocumento12 páginasEJA530ESourav Kumar GuptaAinda não há avaliações
- Datasheet MPX5100DPDocumento16 páginasDatasheet MPX5100DPKemahyanto Exaudi SiahaanAinda não há avaliações
- Manual Ep5 Spirax SarcoDocumento2 páginasManual Ep5 Spirax SarcoWesley de Almeida75% (4)
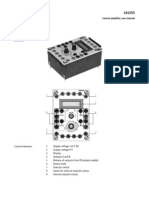
- Amplificador Proporcional FestoDocumento6 páginasAmplificador Proporcional Festoal3xffAinda não há avaliações
- H1000e I Ema-Emc PDFDocumento4 páginasH1000e I Ema-Emc PDFNguyen Van ChungAinda não há avaliações
- Atex 7700e-185977Documento9 páginasAtex 7700e-185977Bright OkunkpolorAinda não há avaliações
- D02601880 - Instruction ManualDocumento2 páginasD02601880 - Instruction ManualAsyraf BadaruddinAinda não há avaliações
- Manual Servomex Xendos 1800Documento20 páginasManual Servomex Xendos 1800Josh MoralesAinda não há avaliações
- Valtek XL Series High Performance Positioner: For Control ValvesDocumento8 páginasValtek XL Series High Performance Positioner: For Control ValvesRifadli GatesAinda não há avaliações
- 000 1 Ca3109Documento20 páginas000 1 Ca3109moongaboongaAinda não há avaliações
- 040shj60h8k5a4yex8yk4dhwa53y PDFDocumento9 páginas040shj60h8k5a4yex8yk4dhwa53y PDFRenivaldoAinda não há avaliações
- Fusing Equipment: Dual Sensing Bay-O-Net Fuse LinkDocumento6 páginasFusing Equipment: Dual Sensing Bay-O-Net Fuse Linksaniya_mirza4Ainda não há avaliações
- Micron TransformersDocumento7 páginasMicron TransformersJedha YantiAinda não há avaliações
- 8Ch Darlington Sink Driver: TD62081 084AP/CP/F/AFDocumento12 páginas8Ch Darlington Sink Driver: TD62081 084AP/CP/F/AFFarley Vieira da SilvaAinda não há avaliações
- SD 16 eDocumento20 páginasSD 16 eseaqu3stAinda não há avaliações
- Top 221-227Documento20 páginasTop 221-227Radu MălureanuAinda não há avaliações
- Legal and Ethical Issues in Computer Science, Information Technology, and Software EngineeringDocumento84 páginasLegal and Ethical Issues in Computer Science, Information Technology, and Software EngineeringEllora Austria RodelAinda não há avaliações
- Audit Trail PDFDocumento1 páginaAudit Trail PDFXyzyAinda não há avaliações
- RMA Planing Guide 200708 v1 1-1-36Documento36 páginasRMA Planing Guide 200708 v1 1-1-36viswanath_manjulaAinda não há avaliações
- 8 Discipline-Corrective Action: Indo-MIM ConfidentialDocumento15 páginas8 Discipline-Corrective Action: Indo-MIM ConfidentialanbuskpAinda não há avaliações
- 300Mbps Av500 Wifi Powerline Extender: Tl-Wpa4220Documento2 páginas300Mbps Av500 Wifi Powerline Extender: Tl-Wpa4220Ásgeirr Ánsgar Ósgar CanuroAinda não há avaliações
- Adobe Photoshop CS6 BibleDocumento220 páginasAdobe Photoshop CS6 BibleClaudia100% (1)
- UntitledDocumento155 páginasUntitledpriyait182Ainda não há avaliações
- Comptia Network+ in A Nutshell: Chapter OneDocumento28 páginasComptia Network+ in A Nutshell: Chapter OneEvans MarlonAinda não há avaliações
- CSSLP Exam OutlineDocumento13 páginasCSSLP Exam OutlineLuis Felipe GaleanoAinda não há avaliações
- Air International 11.2021Documento100 páginasAir International 11.2021Mihaila Claudiu-Daniel100% (1)
- STZ Plans Full INFO RevisedDocumento492 páginasSTZ Plans Full INFO RevisedaaaaAinda não há avaliações
- 3) V41N1 - The Challenges of Cyber DeterrenceDocumento11 páginas3) V41N1 - The Challenges of Cyber DeterrenceSALAIMARAGATHAMANIAinda não há avaliações
- 6.3.1.3 Packet Tracer - Layer 2 VLAN SecurityDocumento3 páginas6.3.1.3 Packet Tracer - Layer 2 VLAN SecurityCésar Argumedo100% (1)
- HOSTSDocumento236 páginasHOSTSblayopfAinda não há avaliações
- CryptoDocumento34 páginasCryptomhmd2222Ainda não há avaliações
- Nozzle LoadDocumento2 páginasNozzle LoadrahulAinda não há avaliações
- Khurram Adeel - Head Internal Audit - Mobilink Microfinance Bank LTD - LinkedIn PDFDocumento1 páginaKhurram Adeel - Head Internal Audit - Mobilink Microfinance Bank LTD - LinkedIn PDFSaife GeeAinda não há avaliações
- NS3 FortiNACDocumento3 páginasNS3 FortiNACSebastian Molina FernandezAinda não há avaliações
- ISO27k ISMS Management Review Meeting AgendaDocumento1 páginaISO27k ISMS Management Review Meeting AgendaNeeraj Sharma0% (1)
- How To Get A CPF 2022Documento2 páginasHow To Get A CPF 2022hackerzAinda não há avaliações
- IsDocumento70 páginasIspavlosmakridakis2525Ainda não há avaliações
- Be Summer 2022Documento2 páginasBe Summer 2022Jenish LathiyaAinda não há avaliações
- Efficient Courier Tracking System ProjectDocumento5 páginasEfficient Courier Tracking System ProjectRajesh Kumar100% (2)
- Profile Digital PlusDocumento17 páginasProfile Digital PlusjolymolyAinda não há avaliações
- Write EssayDocumento2 páginasWrite EssaySatria Yudha WirawanAinda não há avaliações
- GoDocumento649 páginasGoRobert Raines100% (1)
- Grammar - English Aptitude MCQ Questions and AnswersDocumento4 páginasGrammar - English Aptitude MCQ Questions and AnswersSojol KumarAinda não há avaliações
- A Game Theory Method To Cyber-Threat Information Sharing in Cloud Computing TechnologyDocumento12 páginasA Game Theory Method To Cyber-Threat Information Sharing in Cloud Computing Technologyasusmaxprom177Ainda não há avaliações
- UNIX NotesDocumento12 páginasUNIX NoteskapileswardoraAinda não há avaliações
- Privacy Protection Based Access Control Scheme in Cloud-Based Services - 1crore ProjectsDocumento5 páginasPrivacy Protection Based Access Control Scheme in Cloud-Based Services - 1crore ProjectsAshok ChelikaAinda não há avaliações
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionNo EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionNota: 4.5 de 5 estrelas4.5/5 (543)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionNo EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionNota: 4 de 5 estrelas4/5 (331)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceAinda não há avaliações
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsNo EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsNota: 3.5 de 5 estrelas3.5/5 (2)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tNo EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tNota: 4.5 de 5 estrelas4.5/5 (27)
- Arduino and Raspberry Pi Sensor Projects for the Evil GeniusNo EverandArduino and Raspberry Pi Sensor Projects for the Evil GeniusAinda não há avaliações
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeNo EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeNota: 4.5 de 5 estrelas4.5/5 (10)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialNo EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialNota: 3.5 de 5 estrelas3.5/5 (3)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)No EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Nota: 4 de 5 estrelas4/5 (2)
- The Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024No EverandThe Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024Ainda não há avaliações
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersNo Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersNota: 5 de 5 estrelas5/5 (1)
- Power System Control and ProtectionNo EverandPower System Control and ProtectionB. Don RussellNota: 4 de 5 estrelas4/5 (11)
- Beginner's Guide to Reading Schematics, Fourth EditionNo EverandBeginner's Guide to Reading Schematics, Fourth EditionNota: 3.5 de 5 estrelas3.5/5 (10)
- A Mind at Play: How Claude Shannon Invented the Information AgeNo EverandA Mind at Play: How Claude Shannon Invented the Information AgeNota: 4 de 5 estrelas4/5 (53)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...No EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Ainda não há avaliações
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonNo EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonNota: 5 de 5 estrelas5/5 (2)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldNo EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldNota: 4 de 5 estrelas4/5 (87)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNo EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsAinda não há avaliações
- Electric Powertrain: Energy Systems, Power Electronics and Drives for Hybrid, Electric and Fuel Cell VehiclesNo EverandElectric Powertrain: Energy Systems, Power Electronics and Drives for Hybrid, Electric and Fuel Cell VehiclesAinda não há avaliações
- Power Quality in Power Systems and Electrical MachinesNo EverandPower Quality in Power Systems and Electrical MachinesNota: 4.5 de 5 estrelas4.5/5 (11)
- Beyond the Hype A Realistic Look at Electric VehiclesNo EverandBeyond the Hype A Realistic Look at Electric VehiclesAinda não há avaliações