Você também pode gostar
- Introducao Robotica V5 09jan2022Documento19 páginasIntroducao Robotica V5 09jan2022MauricioAinda não há avaliações
- Modelagem e simulação de um motor CCDocumento15 páginasModelagem e simulação de um motor CCRodolfo Brigatto FerreiraAinda não há avaliações
- Implementando Um Inversor De Frequência No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Implementando Um Soft-starter No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Soft-starter No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Implementando Um Conversor Mono->tri Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Conversor Mono->tri Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- UFJSJ Relatório Eletrônica de Potência Motor CCDocumento8 páginasUFJSJ Relatório Eletrônica de Potência Motor CCMatheus RodriguesAinda não há avaliações
- Encoder, PLC e Programação de FunçõesDocumento27 páginasEncoder, PLC e Programação de FunçõesRui FerreiraAinda não há avaliações
- Lab 4 SCMDocumento11 páginasLab 4 SCMCaetano PellegrinAinda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Circuito de varredura e controle de luminosidade com acelerômetroDocumento7 páginasCircuito de varredura e controle de luminosidade com acelerômetroGustavo MelnecenkoAinda não há avaliações
- Robótica no Matlab: Criação e Simulação de ManipuladoresDocumento34 páginasRobótica no Matlab: Criação e Simulação de ManipuladoresJoão Gabriel Castilho HaineAinda não há avaliações
- Implementando Um Soft-starter Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Implementação de um controlador PID para estabilização de pêndulo invertidoDocumento4 páginasImplementação de um controlador PID para estabilização de pêndulo invertidoMarcos Paulo Dos SantosAinda não há avaliações
- Desenvolvendo Um Gerador De Mv Programado No ArduinoNo EverandDesenvolvendo Um Gerador De Mv Programado No ArduinoAinda não há avaliações
- Implementando Um Inversor De Frequência Escalar Programado No Arduino Com Driver Para Motor De Até 3 CvNo EverandImplementando Um Inversor De Frequência Escalar Programado No Arduino Com Driver Para Motor De Até 3 CvAinda não há avaliações
- 03 Programacao Fanuc 21 PDFDocumento87 páginas03 Programacao Fanuc 21 PDFNaldoVicenteAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Monitorando Através Do Visual C# O Barômetro Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual C# O Barômetro Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Atividade RTS Grupo14Documento19 páginasAtividade RTS Grupo14gabi freitasAinda não há avaliações
- Implementação Digital de Controladores PIDDocumento13 páginasImplementação Digital de Controladores PIDponcianonetoAinda não há avaliações
- Controle Discreto Relatório 2: Compensadores de Fase, PI e PIDDocumento33 páginasControle Discreto Relatório 2: Compensadores de Fase, PI e PIDjose luis huayanay villarAinda não há avaliações
- Sistema Microprocessado para Controle de Posição AngularDocumento14 páginasSistema Microprocessado para Controle de Posição AngularÉlisson RíllerAinda não há avaliações
- Projeto de controle de posição de motor CC usando PID digitalDocumento17 páginasProjeto de controle de posição de motor CC usando PID digitalvanessacavalcantiiAinda não há avaliações
- Implementando Um Conversor Mono->tri Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Conversor Mono->tri Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- Eletronica Analogica2 2Documento10 páginasEletronica Analogica2 2Ádrian Henrique100% (1)
- Monitorando Através Do Visual Basic O Barômetro Com O Stm32f103c8 Programado No ArduinoNo EverandMonitorando Através Do Visual Basic O Barômetro Com O Stm32f103c8 Programado No ArduinoAinda não há avaliações
- 4 - Laboratório Controlador PD, PI e PIDDocumento13 páginas4 - Laboratório Controlador PD, PI e PIDmarcelAinda não há avaliações
- Laboratório 1 - Análise e Controle de Sistemas MecânicosDocumento18 páginasLaboratório 1 - Análise e Controle de Sistemas Mecânicosjmaj jmajAinda não há avaliações
- Lista 43 ControleDocumento8 páginasLista 43 ControleMatheus AganeteAinda não há avaliações
- Desenvolvendo Um Datalogger Para Medir Voltímetro Trifásico Com PicNo EverandDesenvolvendo Um Datalogger Para Medir Voltímetro Trifásico Com PicAinda não há avaliações
- Modelagem e Controle de ConversoresDocumento76 páginasModelagem e Controle de ConversoresPedro Victor GomesAinda não há avaliações
- Enunciados Dos Exercícios Das Aulas Práticas 2023 - 24Documento8 páginasEnunciados Dos Exercícios Das Aulas Práticas 2023 - 24samborwarzechaAinda não há avaliações
- Sistema Eletro HidraulicoDocumento12 páginasSistema Eletro HidraulicodiegoarimateiaAinda não há avaliações
- Controlo PID Discreto: Métodos de Sintonização e ModificaçõesDocumento7 páginasControlo PID Discreto: Métodos de Sintonização e ModificaçõesRaniere LiraAinda não há avaliações
- Implementando Um Soft-starter Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- COMANDOS DE SISTEMAS E IHM - EXERCÍCIOS DE SINAIS ANALÓGICOSDocumento10 páginasCOMANDOS DE SISTEMAS E IHM - EXERCÍCIOS DE SINAIS ANALÓGICOSFelipe Fiorotti da RochaAinda não há avaliações
- Medindo O Valor De Pico Da Medição De 4 A 20 Ma Programado No ArduinoNo EverandMedindo O Valor De Pico Da Medição De 4 A 20 Ma Programado No ArduinoAinda não há avaliações
- Medindo O Valor De Pico Fluxo De Massa Programado Em Arduino Esp32No EverandMedindo O Valor De Pico Fluxo De Massa Programado Em Arduino Esp32Ainda não há avaliações
- Assembly 0001Documento9 páginasAssembly 0001Pablo PinheiroAinda não há avaliações
- Monitorando Um Barômetro Através Do Telegram Com Esp32 Programado Em ArduinoNo EverandMonitorando Um Barômetro Através Do Telegram Com Esp32 Programado Em ArduinoAinda não há avaliações
- Manual de Programação CNCDocumento63 páginasManual de Programação CNCAlmir Santos100% (7)
- Apostila - Modelagem de Sistemas Fisicos - Parte 04Documento8 páginasApostila - Modelagem de Sistemas Fisicos - Parte 04Anderson KumazawaAinda não há avaliações
- Circuitos Digitais Lista ExercíciosDocumento22 páginasCircuitos Digitais Lista ExercíciosElder SantosAinda não há avaliações
- Análise de sistemas dinâmicos de 1a e 2a ordem através de simulaçãoDocumento9 páginasAnálise de sistemas dinâmicos de 1a e 2a ordem através de simulaçãoduartedesantannaAinda não há avaliações
- Filtros DigitaisDocumento13 páginasFiltros DigitaisGustavo Pelegrini100% (1)
- Atividade Pratica Controle ContinuoDocumento20 páginasAtividade Pratica Controle ContinuoLadson Josiana Pires100% (1)
- Sistema de Controle de Um Boeing 747Documento13 páginasSistema de Controle de Um Boeing 747Diego PeixotoAinda não há avaliações
- Função de Transferência do Modelo de Insulina GlargineDocumento12 páginasFunção de Transferência do Modelo de Insulina GlargineCarlos LimaAinda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Relatório BiocombustíveisDocumento126 páginasRelatório BiocombustíveisMauricioAinda não há avaliações
- TextoDocumento1 páginaTextoMauricioAinda não há avaliações
- 08 BuildingsDocumento1 página08 BuildingsMauricioAinda não há avaliações
- Velocidade rodas robôDocumento1 páginaVelocidade rodas robôMauricioAinda não há avaliações
- Permutador de Tubo DuploDocumento36 páginasPermutador de Tubo DuploMauricioAinda não há avaliações
- Introdução à robótica - Constituintes e funcionamentoDocumento10 páginasIntrodução à robótica - Constituintes e funcionamentoMauricioAinda não há avaliações
- Introdução À Robótica - FélixDocumento15 páginasIntrodução À Robótica - FélixMauricioAinda não há avaliações
- 01 Cálculo Do KF - Exercício 3 I) e Ii)Documento3 páginas01 Cálculo Do KF - Exercício 3 I) e Ii)MauricioAinda não há avaliações
- Difusividade do éter etílico no arDocumento17 páginasDifusividade do éter etílico no arMauricioAinda não há avaliações
- Componentes Da InstalaçãoDocumento2 páginasComponentes Da InstalaçãoMauricioAinda não há avaliações
- TB2Documento8 páginasTB2MauricioAinda não há avaliações
- Potenciometria e medição de diferença de potencialDocumento49 páginasPotenciometria e medição de diferença de potencialRicardoFrança100% (1)
- Cromatografia Líquida de Alta EficiênciaDocumento29 páginasCromatografia Líquida de Alta EficiênciaWiliam OliveiraAinda não há avaliações
- Apostila - Química Analítica III (Análise Química Instrumental) - Período 2013.1Documento170 páginasApostila - Química Analítica III (Análise Química Instrumental) - Período 2013.1aa_bertoldoAinda não há avaliações
- TestesDocumento7 páginasTestesisabel carlosAinda não há avaliações
- Manejo de Animais de Grande PorteDocumento2 páginasManejo de Animais de Grande PorteAmide Aly AmadeAinda não há avaliações
- Aula00 Information Week Brasil Ed.208Documento100 páginasAula00 Information Week Brasil Ed.208Carlos Eduardo MoscardiniAinda não há avaliações
- 28 - EletroquímicaDocumento21 páginas28 - EletroquímicaLuis cordeiroAinda não há avaliações
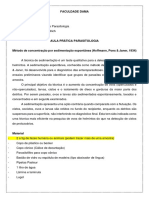
- Método de concentração por sedimentação espontânea para detecção de parasitas em amostras fecaisDocumento6 páginasMétodo de concentração por sedimentação espontânea para detecção de parasitas em amostras fecaisBruno da Silva PrestesAinda não há avaliações
- Prova de Matemática sobre Proporcionalidade Direta na Escola Estadual José Pinto CoelhoDocumento1 páginaProva de Matemática sobre Proporcionalidade Direta na Escola Estadual José Pinto CoelhoMirian AngeliAinda não há avaliações
- Lista de Materiais HidrossanitarioDocumento1 páginaLista de Materiais HidrossanitariobrunoAinda não há avaliações
- Manual de Manobras - (WWW - Canalpiloto.com - BR)Documento31 páginasManual de Manobras - (WWW - Canalpiloto.com - BR)Denis CarvalhoAinda não há avaliações
- Sequência de E-mails e Mensagens para Venda de FormaçãoDocumento13 páginasSequência de E-mails e Mensagens para Venda de FormaçãoFábio SzaAinda não há avaliações
- (IME) Distribuição EletronicaDocumento2 páginas(IME) Distribuição Eletronicalia junsAinda não há avaliações
- Aula 1 Inicial e Introdução FenômenosDocumento3 páginasAula 1 Inicial e Introdução FenômenosJaqueline SoaresAinda não há avaliações
- Relatório de Estágio NATALINA - 2023Documento44 páginasRelatório de Estágio NATALINA - 2023Silvio MendesAinda não há avaliações
- Obso ResDocumento3 páginasObso ResDeusirene AparecidaAinda não há avaliações
- Freud Paradigma PsicanaliticoDocumento8 páginasFreud Paradigma Psicanaliticoxicana100% (15)
- Matriz Urbana de Vila BoaDocumento18 páginasMatriz Urbana de Vila BoaIrina AlencarAinda não há avaliações
- Cronicas de Thedas PDFDocumento83 páginasCronicas de Thedas PDFbioamnAinda não há avaliações
- Crown Xti PDFDocumento14 páginasCrown Xti PDFTatty GonçalvesAinda não há avaliações
- Sobre A Definição de MedicinaDocumento7 páginasSobre A Definição de MedicinaMsaluizAinda não há avaliações
- Regras de trânsitoDocumento32 páginasRegras de trânsitosienafire83% (6)
- A visão futurista de Agostinho Neto refletida em seu discurso poéticoDocumento11 páginasA visão futurista de Agostinho Neto refletida em seu discurso poéticoCordeiro De Mero El-TchissinguiAinda não há avaliações
- RPS emitido por serviços de processamento de dadosDocumento1 páginaRPS emitido por serviços de processamento de dadosRodrigo FerrariAinda não há avaliações
- BMP 8500 compactador multiusoDocumento2 páginasBMP 8500 compactador multiusoJaciane AraujoAinda não há avaliações
- Mandado de Segurança para garantir posse de estrangeiro aprovado em concurso público federalDocumento4 páginasMandado de Segurança para garantir posse de estrangeiro aprovado em concurso público federalNICE CALDAS DA SILVAAinda não há avaliações
- IS-240 - Estudos Geotécnicos para Proj ExecutivoDocumento4 páginasIS-240 - Estudos Geotécnicos para Proj ExecutivoJosé António Otto VicenteAinda não há avaliações
- 80 Controle de Qualidade de Aterros Hidraulicos Arenosos PDFDocumento8 páginas80 Controle de Qualidade de Aterros Hidraulicos Arenosos PDFFrancisco Raimundo da SilvaAinda não há avaliações
- Ensino matemático com situações didáticasDocumento18 páginasEnsino matemático com situações didáticasjoseAinda não há avaliações
- Crenças e Costumes Nativo - SDocumento21 páginasCrenças e Costumes Nativo - Sneirsouza100% (1)
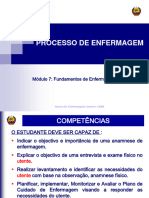
- 7 Fundamentos de Enfermagem 013726 101231Documento671 páginas7 Fundamentos de Enfermagem 013726 101231inaciodossantosmacuacua901Ainda não há avaliações
- Circular InformativaDocumento2 páginasCircular InformativaMarta SilvaAinda não há avaliações
- Modelo Canvas - Estruture o Plano de Negócios Da Sua Empresa de Forma Prática e DinâmicaDocumento6 páginasModelo Canvas - Estruture o Plano de Negócios Da Sua Empresa de Forma Prática e DinâmicaMN NT100% (1)