Você também pode gostar
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Data Sheet of ADE7751Documento17 páginasData Sheet of ADE7751NithyaAinda não há avaliações
- Compteur 7757 - A PDFDocumento16 páginasCompteur 7757 - A PDFbromartAinda não há avaliações
- LC MOS 8-Channel, 12-Bit High Speed Data Acquisition System: S Conversion TimeDocumento20 páginasLC MOS 8-Channel, 12-Bit High Speed Data Acquisition System: S Conversion Timeharsh.nsit2007752Ainda não há avaliações
- +2.7 V To +5.5 V, 350 KSPS, 10-Bit 4-/8-Channel Sampling AdcsDocumento20 páginas+2.7 V To +5.5 V, 350 KSPS, 10-Bit 4-/8-Channel Sampling AdcsAbhishek ChaudharyAinda não há avaliações
- Ad7730 7730LDocumento52 páginasAd7730 7730LDa Q ShaAinda não há avaliações
- ADE7753Documento38 páginasADE7753Kunal KundanamAinda não há avaliações
- LC MOS Precision Quad SPST Switches ADG411/ADG412/ADG413: 615 V Analog Signal Range V) MW)Documento8 páginasLC MOS Precision Quad SPST Switches ADG411/ADG412/ADG413: 615 V Analog Signal Range V) MW)Fer TgAinda não há avaliações
- High Performance Video Op AmpDocumento16 páginasHigh Performance Video Op Ampsrboghe651665Ainda não há avaliações
- AD7533Documento12 páginasAD7533Jose David Medina MartinezAinda não há avaliações
- Adxrs610 Yaw Rate GyroDocumento12 páginasAdxrs610 Yaw Rate GyroTarek Car MillaAinda não há avaliações
- 3 V To 5 V Single Supply, 200 KSPS 8-Channel, 12-Bit Sampling ADC AD7858/AD7858LDocumento36 páginas3 V To 5 V Single Supply, 200 KSPS 8-Channel, 12-Bit Sampling ADC AD7858/AD7858Ljnax101Ainda não há avaliações
- HS-2420RH - Fast Sample and HolDocumento8 páginasHS-2420RH - Fast Sample and HolDeepa DevarajAinda não há avaliações
- Ade7752 7752aDocumento24 páginasAde7752 7752aKram Nhoj TabatabAinda não há avaliações
- Ad8421 PDFDocumento28 páginasAd8421 PDFsoft4gsmAinda não há avaliações
- AD8314Documento16 páginasAD8314Aparna BhardwajAinda não há avaliações
- ADP3180Documento20 páginasADP3180chrizzcloAinda não há avaliações
- LC MOS Single Supply, 12-Bit 600 KSPS ADC: S Conversion TimeDocumento14 páginasLC MOS Single Supply, 12-Bit 600 KSPS ADC: S Conversion TimeThang PhamAinda não há avaliações
- Ad 421Documento14 páginasAd 421Vishal Devrao JadhavAinda não há avaliações
- CMOS 1.8 V to 5.5 V, 2.5 Ω SPDT Switch/2:1 Mux in Tiny SC70 Package ADG779Documento12 páginasCMOS 1.8 V to 5.5 V, 2.5 Ω SPDT Switch/2:1 Mux in Tiny SC70 Package ADG779Fer TgAinda não há avaliações
- 2.35 V To 5.25 V, 1 MSPS, 12-/10-/8-Bit Adcs in 6-Lead Sc70: A MaxDocumento24 páginas2.35 V To 5.25 V, 1 MSPS, 12-/10-/8-Bit Adcs in 6-Lead Sc70: A MaxNatthaphob NimpitiwanAinda não há avaliações
- Ad 7524Documento8 páginasAd 7524Giovanny ContrerasAinda não há avaliações
- MCP 3909Documento44 páginasMCP 3909José HeinAinda não há avaliações
- High Speed, Low Power Monolithic Op Amp AD847Documento12 páginasHigh Speed, Low Power Monolithic Op Amp AD847SaadAhmedBeihaqiAinda não há avaliações
- Ad 7607Documento23 páginasAd 7607Mohanrajan RajendranAinda não há avaliações
- ADu M3190Documento16 páginasADu M3190Varun ThakurAinda não há avaliações
- AD9850Documento20 páginasAD9850olopezAinda não há avaliações
- Energy Metering Ic With Pulse Output: DescriptionDocumento7 páginasEnergy Metering Ic With Pulse Output: DescriptionvungocduongAinda não há avaliações
- 3 V To 5 V Single Supply, 200 KSPS 8-Channel, 12-Bit Sampling ADC AD7858/AD7858LDocumento32 páginas3 V To 5 V Single Supply, 200 KSPS 8-Channel, 12-Bit Sampling ADC AD7858/AD7858LJodelCamarinAinda não há avaliações
- ISL6565A, ISL6565B: Multi-Phase PWM Controller With Precision R or DCR Current Sensing For VR10.X Application FeaturesDocumento28 páginasISL6565A, ISL6565B: Multi-Phase PWM Controller With Precision R or DCR Current Sensing For VR10.X Application FeaturesFranciscoGomezAinda não há avaliações
- Data Sheet of Ad 7817Documento20 páginasData Sheet of Ad 7817Gaurav MishraAinda não há avaliações
- Low Noise, Low Gain Drift, G 2000 Instrumentation AmplifierDocumento20 páginasLow Noise, Low Gain Drift, G 2000 Instrumentation AmplifiervabecompAinda não há avaliações
- 9-0-9 Step Down TransformerDocumento20 páginas9-0-9 Step Down TransformerSarthak JoshiAinda não há avaliações
- 3 3/4 Digit Auto DMM with Frequency CounterDocumento23 páginas3 3/4 Digit Auto DMM with Frequency CounterBluff FlersAinda não há avaliações
- 3 V/5 V, 1 MW 2-/3-Channel 16-Bit, Sigma-Delta Adcs: A MaxDocumento32 páginas3 V/5 V, 1 MW 2-/3-Channel 16-Bit, Sigma-Delta Adcs: A Maxmeroka2000Ainda não há avaliações
- D D D D D D D D D: DescriptionDocumento36 páginasD D D D D D D D D: Descriptiongronci5410Ainda não há avaliações
- Precision, Low Cost, High Speed, Bifet Op Amp: Ⴞ0.01% In 1.0 S S Min Slew Rate (Ad711J)Documento16 páginasPrecision, Low Cost, High Speed, Bifet Op Amp: Ⴞ0.01% In 1.0 S S Min Slew Rate (Ad711J)egrumelAinda não há avaliações
- PLL Frequency Synthesizer ADF4107: Features General DescriptionDocumento20 páginasPLL Frequency Synthesizer ADF4107: Features General DescriptionThanh Son NguyenAinda não há avaliações
- Discontinued Product: Ratiometric Linear Hall Effect Sensor Ics For High-Temperature OperationDocumento13 páginasDiscontinued Product: Ratiometric Linear Hall Effect Sensor Ics For High-Temperature OperationceferrruAinda não há avaliações
- TLC 5540Documento18 páginasTLC 5540EdgarJCAinda não há avaliações
- Four-Channel, Simultaneous Sampling, Fast, 14-Bit ADCDocumento19 páginasFour-Channel, Simultaneous Sampling, Fast, 14-Bit ADCsaiprathimaAinda não há avaliações
- ADS1258 16 Channels 24 Bit TIDocumento54 páginasADS1258 16 Channels 24 Bit TIfurehman30Ainda não há avaliações
- Medical Ecg Ina326Documento23 páginasMedical Ecg Ina326ronny5525Ainda não há avaliações
- THS4051, THS4052 70-Mhz High-Speed Amplifiers: DescriptionDocumento25 páginasTHS4051, THS4052 70-Mhz High-Speed Amplifiers: DescriptionSaadAhmedBeihaqiAinda não há avaliações
- Adc - Ad7713Documento28 páginasAdc - Ad7713Pablo Samuel LunaAinda não há avaliações
- Ad9851 Cmos 180 MHZ Dds/Dac SynthesizerDocumento24 páginasAd9851 Cmos 180 MHZ Dds/Dac SynthesizerVijay VigneshAinda não há avaliações
- AD829AQ-High Speed Video OpampDocumento13 páginasAD829AQ-High Speed Video OpamphariharanccetAinda não há avaliações
- Ads 7825Documento21 páginasAds 7825geo888007Ainda não há avaliações
- DG201A, DG202: Quad SPST, CMOS Analog Switches FeaturesDocumento7 páginasDG201A, DG202: Quad SPST, CMOS Analog Switches FeaturesFilozófus ÖnjelöltAinda não há avaliações
- AMP02Documento12 páginasAMP02ivan bragaAinda não há avaliações
- CD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionDocumento10 páginasCD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionWillianAinda não há avaliações
- OpAmp - MCP6244Documento38 páginasOpAmp - MCP6244Ludwig SchmidtAinda não há avaliações
- SC 9711Documento14 páginasSC 9711dragon-red0816Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsNo EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsNota: 3.5 de 5 estrelas3.5/5 (6)
- Operational Amplifier Circuits: Analysis and DesignNo EverandOperational Amplifier Circuits: Analysis and DesignNota: 4.5 de 5 estrelas4.5/5 (2)
- Plexim Plecs Suite v3.7.3 Win-Mac-LinuxDocumento2 páginasPlexim Plecs Suite v3.7.3 Win-Mac-LinuxsaandoAinda não há avaliações
- Everpres PDFDocumento34 páginasEverpres PDFsaandoAinda não há avaliações
- ReadmerDocumento79 páginasReadmersatyajtiAinda não há avaliações
- C-12 ApecDocumento6 páginasC-12 ApecsaandoAinda não há avaliações
- Title Designed by Revision Page 1 of 4Documento4 páginasTitle Designed by Revision Page 1 of 4saandoAinda não há avaliações
- Application of Z-Source Inverter For Permanent-Magnet Synchronous Motor Drive System For Electric VehiclesDocumento6 páginasApplication of Z-Source Inverter For Permanent-Magnet Synchronous Motor Drive System For Electric VehiclessaandoAinda não há avaliações
- Charging OptionsDocumento3 páginasCharging OptionssaandoAinda não há avaliações
- Tax-Free Incomes ExplainedDocumento37 páginasTax-Free Incomes ExplainedsaandoAinda não há avaliações
- c97 PDFDocumento6 páginasc97 PDFsaandoAinda não há avaliações
- 46 PDFDocumento6 páginas46 PDFsaandoAinda não há avaliações
- Marek JasinskiDocumento160 páginasMarek JasinskisaandoAinda não há avaliações
- Park TransformationDocumento14 páginasPark TransformationSanjeev Kumar T MAinda não há avaliações
- High Technology in Ancient Sanskrit ManuscriptsDocumento12 páginasHigh Technology in Ancient Sanskrit ManuscriptsYadav Kannan GovindarajAinda não há avaliações
- Control of The Permanent Magnet Synchronous Motor Using Model Reference Dynamic InversionDocumento11 páginasControl of The Permanent Magnet Synchronous Motor Using Model Reference Dynamic InversionsaandoAinda não há avaliações
- A Real-Time Observer For UAVa S Brushless MotorsDocumento6 páginasA Real-Time Observer For UAVa S Brushless MotorssaandoAinda não há avaliações
- New Microsoft Excel WorksheetDocumento1 páginaNew Microsoft Excel WorksheetsaandoAinda não há avaliações
- Spra494 PDFDocumento72 páginasSpra494 PDFsaandoAinda não há avaliações
- ReadmeDocumento3 páginasReadmeAndres Arsk Wales SosaAinda não há avaliações
- DRFGDFHDocumento1 páginaDRFGDFHsaandoAinda não há avaliações
- PSIM User ManualDocumento247 páginasPSIM User ManualsaandoAinda não há avaliações
- 100008Documento20 páginas100008saandoAinda não há avaliações
- Using Saber From Command LineDocumento2 páginasUsing Saber From Command LinesaandoAinda não há avaliações
- Install Guide Ja JPDocumento153 páginasInstall Guide Ja JPkpnskAinda não há avaliações
- Rigid Flex PCB.3DDocumento1 páginaRigid Flex PCB.3DsaandoAinda não há avaliações
- Install GuideDocumento159 páginasInstall GuideKandimalla Divyabramhendra ChowdaryAinda não há avaliações
- Proceedings Ndes 2010Documento253 páginasProceedings Ndes 2010saandoAinda não há avaliações
- 4 PDFDocumento1 página4 PDFsaandoAinda não há avaliações
- Prompt LuaDocumento1 páginaPrompt LuasaandoAinda não há avaliações
- Part 1Documento1 páginaPart 1Vikas PsAinda não há avaliações
- World-Beam® Qs18: ModelsDocumento3 páginasWorld-Beam® Qs18: ModelssanjeckaAinda não há avaliações
- Introduction to Proteus PCB Design and Simulation SoftwareDocumento14 páginasIntroduction to Proteus PCB Design and Simulation SoftwareGebBerhe100% (2)
- Mixed-Signal-Electronics: PD Dr.-Ing. Stephan HenzlerDocumento33 páginasMixed-Signal-Electronics: PD Dr.-Ing. Stephan HenzlerAhmed HamoudaAinda não há avaliações
- 8051Documento141 páginas8051sudhinnnAinda não há avaliações
- HDB3 ReportDocumento98 páginasHDB3 ReportCornel CaceamacAinda não há avaliações
- Cycloaliphatic Epoxy ResinDocumento6 páginasCycloaliphatic Epoxy ResinAdhyartha KerafAinda não há avaliações
- Tuv Rheinland Bifacial Photovoltaic Modules and SystemsDocumento166 páginasTuv Rheinland Bifacial Photovoltaic Modules and SystemsDavid GarciaAinda não há avaliações
- 9n90b 9n90cDocumento7 páginas9n90b 9n90cSunil KumarAinda não há avaliações
- IOM 88 Module BDocumento65 páginasIOM 88 Module BandiAinda não há avaliações
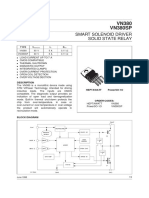
- VN380 Smart Solenoid Driver SpecificationsDocumento10 páginasVN380 Smart Solenoid Driver SpecificationsAdan Pérez EchevarríaAinda não há avaliações
- Verification of Ohm's Law Lab ReportDocumento8 páginasVerification of Ohm's Law Lab ReportBotondAinda não há avaliações
- Large Signal Modeling of GaN Device For High Power Amplifier DesignDocumento134 páginasLarge Signal Modeling of GaN Device For High Power Amplifier DesignmarcwdAinda não há avaliações
- Solid States Question PaperDocumento1 páginaSolid States Question PaperSomu Yashawant ChaudhariAinda não há avaliações
- Diode Clamping CircuitsDocumento7 páginasDiode Clamping Circuitsgayathri-eceAinda não há avaliações
- Important Questions from Class 1&2Documento5 páginasImportant Questions from Class 1&2Debdeep BhattacharyaAinda não há avaliações
- Differential and Multistage AmplifierDocumento43 páginasDifferential and Multistage AmplifierΜαρια ΡοδακοπουλουAinda não há avaliações
- Controlled Tripping of Impulse GeneratorsDocumento16 páginasControlled Tripping of Impulse GeneratorsGopinath SingaramAinda não há avaliações
- Measuring SystemsDocumento59 páginasMeasuring SystemsnewworldosemwegieAinda não há avaliações
- EE2 Lecture 1Documento44 páginasEE2 Lecture 1woojoo666Ainda não há avaliações
- Why Starting Current of Induction Motor Is High - Engineering TutorialDocumento3 páginasWhy Starting Current of Induction Motor Is High - Engineering TutorialPabitra Kumar Patra100% (1)
- SCR Phase Control Dimmer SchematicDocumento9 páginasSCR Phase Control Dimmer SchematicCris DucusinAinda não há avaliações
- RelaysDocumento218 páginasRelaysGary NugasAinda não há avaliações
- UHF Power MOS Transistor: Important NoticeDocumento16 páginasUHF Power MOS Transistor: Important NoticexoxovasAinda não há avaliações
- United States Patent: Hochberg Et AlDocumento18 páginasUnited States Patent: Hochberg Et Alأبو محمدAinda não há avaliações
- Simply A Logic CircuitDocumento72 páginasSimply A Logic CircuitIbenk MyraldiAinda não há avaliações
- 0.18 Um Low Noise AmplifierDocumento66 páginas0.18 Um Low Noise AmplifierHarish Kumar100% (1)
- Smart Highside Power Switch: Features Product SummaryDocumento14 páginasSmart Highside Power Switch: Features Product Summaryalfredo521Ainda não há avaliações
- EMT 369 Wk2 Power Semiconductor Devices (GC)Documento53 páginasEMT 369 Wk2 Power Semiconductor Devices (GC)Ashraf YusofAinda não há avaliações
- USB 13025 DriversDocumento57 páginasUSB 13025 DriversJorge More CuadrosAinda não há avaliações
- Cascode Amplifiers and Cascode Current MirrorsDocumento17 páginasCascode Amplifiers and Cascode Current MirrorsJohn ErhinyoAinda não há avaliações