Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hip Hop Producers BibleDocumento15 páginasThe Hip Hop Producers Bibleretroelephant33% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- DSP Principles Algorithms and Applications Third EditionDocumento1.033 páginasDSP Principles Algorithms and Applications Third EditionHarish Gunasekaran100% (1)
- Labview AssignmentDocumento70 páginasLabview AssignmentWilliam JonesAinda não há avaliações
- Technical Specification-iE12A V2.2 PDFDocumento8 páginasTechnical Specification-iE12A V2.2 PDFdrorAinda não há avaliações
- Pattern Recognition and Image Processing in C++-Vieweg+Teubner Verlag (1995)Documento369 páginasPattern Recognition and Image Processing in C++-Vieweg+Teubner Verlag (1995)hazim_74Ainda não há avaliações
- Seismic Hydrocarbon Exploration, 2D and 3D Techniques (H.N. Alsadi, 2016) @geo PediaDocumento341 páginasSeismic Hydrocarbon Exploration, 2D and 3D Techniques (H.N. Alsadi, 2016) @geo Pediaanon_116645248100% (2)
- Aquadopp - Acoustic Doppler TechnologyDocumento2 páginasAquadopp - Acoustic Doppler TechnologywebadminjkAinda não há avaliações
- Putting Theory Into Practice With SimulinkDocumento9 páginasPutting Theory Into Practice With SimulinkJuan pablo CarvajalAinda não há avaliações
- Surface Waves TutorialDocumento79 páginasSurface Waves TutorialsreenathAinda não há avaliações
- NLU Cement MortarDocumento8 páginasNLU Cement MortarAnonymous GRuHWbxJr9Ainda não há avaliações
- Introduction To Digital Video Processing Image and Video Processing Dr. Anil Kokaram Anil - Kokaram@tcd - IeDocumento15 páginasIntroduction To Digital Video Processing Image and Video Processing Dr. Anil Kokaram Anil - Kokaram@tcd - IeSurekha SakhareAinda não há avaliações
- DSP MCQDocumento2 páginasDSP MCQBala MuruganAinda não há avaliações
- Embeded C - Phan2 PDFDocumento175 páginasEmbeded C - Phan2 PDFonlyyou1Ainda não há avaliações
- AC Signals & SamplingDocumento10 páginasAC Signals & Samplingahmed4665Ainda não há avaliações
- ML255 en DS035Documento17 páginasML255 en DS035Fabio UnruhAinda não há avaliações
- Multi-Channel Distance Measurement With ZigBeeDocumento15 páginasMulti-Channel Distance Measurement With ZigBeeTarik KazazAinda não há avaliações
- Fiber Optic Sensors For Construction Materials and BridgesDocumento453 páginasFiber Optic Sensors For Construction Materials and BridgesyarmahdiAinda não há avaliações
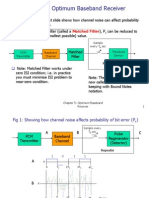
- Chapter 5 Optimum Baseband ReceiverDocumento16 páginasChapter 5 Optimum Baseband ReceiverMohamed Fahmy100% (1)
- Unit 4Documento40 páginasUnit 4Rupali KuteAinda não há avaliações
- Syscomp Circuit Gear MiniDocumento62 páginasSyscomp Circuit Gear MinidizpozAinda não há avaliações
- Digital Inputs & Outputs: - 2TR IN DIGITAL ConnectorDocumento10 páginasDigital Inputs & Outputs: - 2TR IN DIGITAL Connectorzytura2019Ainda não há avaliações
- Digital TransmissionDocumento48 páginasDigital TransmissionDennis AAinda não há avaliações
- MultiMedia Computing 1Documento81 páginasMultiMedia Computing 1Hanar AhmedAinda não há avaliações
- CHAPTER 7 Digital Communications TechniquesDocumento7 páginasCHAPTER 7 Digital Communications TechniquesPatrick GarciaAinda não há avaliações
- Digital Image Processing Multiple Choice Questions Unit Wise - 10EC763Documento9 páginasDigital Image Processing Multiple Choice Questions Unit Wise - 10EC763Ashwini PatilAinda não há avaliações
- SAR Tutorial Chirp SignalDocumento10 páginasSAR Tutorial Chirp SignaldannnirAinda não há avaliações
- The World'S Smallest FFT Analyzer: SignalcalcDocumento6 páginasThe World'S Smallest FFT Analyzer: SignalcalcRonivon OliveiraAinda não há avaliações
- The Ten Commandments of Digital ControlDocumento14 páginasThe Ten Commandments of Digital ControlHüseyin Murat PolaterAinda não há avaliações
- Gender ClassificationDocumento5 páginasGender ClassificationAdedayo tunjiAinda não há avaliações
- UG Core CoursesDocumento26 páginasUG Core Coursesraja viriyalaAinda não há avaliações