Você também pode gostar
- Towards Graphene-Based Devices Fabrication and CharacterizationsDocumento80 páginasTowards Graphene-Based Devices Fabrication and CharacterizationsbasonkuasAinda não há avaliações
- Fun With Chinese Characters 1 PDFDocumento191 páginasFun With Chinese Characters 1 PDFAtul Padwal93% (14)
- Lesson 5-Sentence Combining SkillsDocumento3 páginasLesson 5-Sentence Combining SkillsbasonkuasAinda não há avaliações
- What Is Technical Writing?Documento7 páginasWhat Is Technical Writing?basonkuasAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Quota SamplingDocumento6 páginasQuota SamplingKeking Xoniuqe100% (1)
- EnergyPendulum Gizmo 2Documento6 páginasEnergyPendulum Gizmo 2Delia SmithAinda não há avaliações
- Conditional Chart PDFDocumento1 páginaConditional Chart PDFeduardo menesesAinda não há avaliações
- Phys 31 Module 4Documento42 páginasPhys 31 Module 4Coyzz de GuzmanAinda não há avaliações
- Haytham Ibrahim's Assignment No.2 PDFDocumento29 páginasHaytham Ibrahim's Assignment No.2 PDFAhmed KhairiAinda não há avaliações
- Eqps + Notes (TCS)Documento92 páginasEqps + Notes (TCS)vinayak pawarAinda não há avaliações
- 33 As Statistics Unit 5 TestDocumento2 páginas33 As Statistics Unit 5 TestThomas BeerAinda não há avaliações
- PPT 6 Pms-Remaining Service LifeDocumento22 páginasPPT 6 Pms-Remaining Service LifeSwagata SarkarAinda não há avaliações
- HW04 Columbia Modern Algebra 1Documento2 páginasHW04 Columbia Modern Algebra 1Cecilia WangAinda não há avaliações
- JFo - 3 - 4 ConvertDocumento32 páginasJFo - 3 - 4 ConvertKaltuma OmarAinda não há avaliações
- ProblemDocumento2 páginasProblemJishnuAinda não há avaliações
- Math 6 DLP 1 - Giving Meaning of Exponent and Base Giving The Value of Numbers Involving Exponent PDFDocumento9 páginasMath 6 DLP 1 - Giving Meaning of Exponent and Base Giving The Value of Numbers Involving Exponent PDFZyreen Joy ServanesAinda não há avaliações
- Relational ModelDocumento4 páginasRelational ModelPrateek GoyalAinda não há avaliações
- StatisticsDocumento56 páginasStatisticsdimeAinda não há avaliações
- Chapter 2: Basic Concepts of Probability Theory: 2.1 Specifying Random ExperimentsDocumento6 páginasChapter 2: Basic Concepts of Probability Theory: 2.1 Specifying Random ExperimentsSonam AlviAinda não há avaliações
- Math Demo PlanDocumento3 páginasMath Demo PlanJudith Mondejar De MayoAinda não há avaliações
- PIDE Presentation Part 1 PDFDocumento7 páginasPIDE Presentation Part 1 PDFGilmar DemenekAinda não há avaliações
- Stat Module 5Documento10 páginasStat Module 5Remar Jhon PaineAinda não há avaliações
- Project in Algebra 3rd Grading ProblemsDocumento77 páginasProject in Algebra 3rd Grading Problemsazisah azisAinda não há avaliações
- National PDFDocumento168 páginasNational PDFDINESH100% (1)
- HW 1 SolutionsDocumento3 páginasHW 1 Solutionszainab alshatterAinda não há avaliações
- Engineering Mathematics1 2015 PDFDocumento24 páginasEngineering Mathematics1 2015 PDFsenyonjo emmaAinda não há avaliações
- Representation of Numeric Data in Computer-1Documento3 páginasRepresentation of Numeric Data in Computer-1Anthony LoñezAinda não há avaliações
- Biaxial Bending (Beams in Both Axis) : Ce 514 - Steel DesignDocumento6 páginasBiaxial Bending (Beams in Both Axis) : Ce 514 - Steel DesignFrederick Perez IIAinda não há avaliações
- LESSON PLAN Coordinate GeometryDocumento11 páginasLESSON PLAN Coordinate GeometryLff Lim60% (5)
- AI - Lecture 2 - Uninformed SearchDocumento20 páginasAI - Lecture 2 - Uninformed SearchHunterxHunter03Ainda não há avaliações
- Burning Rate Propeling ChargeDocumento5 páginasBurning Rate Propeling ChargeFira Putri WulandariAinda não há avaliações
- Data Structures Algorithms and Applications in C by Sartraj SahaniDocumento826 páginasData Structures Algorithms and Applications in C by Sartraj SahaniMohammed Nassf100% (1)
- Maths PDFDocumento60 páginasMaths PDFLoh Chee WeiAinda não há avaliações
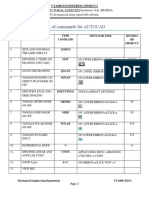
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocumento15 páginasList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelAinda não há avaliações