Você também pode gostar
- Training Report of Industrial Interaction in Cetpa Infotech PDFDocumento40 páginasTraining Report of Industrial Interaction in Cetpa Infotech PDFmjdj1230% (1)
- Embedded SystemsDocumento54 páginasEmbedded SystemsAnkur Kumar100% (1)
- 1.speed Synchronization of Multiple MotorsDocumento89 páginas1.speed Synchronization of Multiple MotorsBhanu TummalapalliAinda não há avaliações
- ACKNOWLEDGEMENTDocumento61 páginasACKNOWLEDGEMENTPV EducationsAinda não há avaliações
- Embedded System ReportDocumento38 páginasEmbedded System ReportAmit Jain100% (1)
- Summer Training Embedded SystemDocumento18 páginasSummer Training Embedded SystemmjcetpaAinda não há avaliações
- Auto Power Supply Control From 4 Different Sources Solar, Mains, Generator & Inverter To Ensure No Break PowerDocumento23 páginasAuto Power Supply Control From 4 Different Sources Solar, Mains, Generator & Inverter To Ensure No Break PowerAnonymous QIuAGIadXm69% (13)
- Interfacing GSM With 8051Documento14 páginasInterfacing GSM With 8051Mohammad Ali100% (1)
- Embedded Systems Dr. Santanu Chaudhury Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 09 More On DSP ProcessorsDocumento37 páginasEmbedded Systems Dr. Santanu Chaudhury Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 09 More On DSP ProcessorsVarun BhanooAinda não há avaliações
- Embedded SystemDocumento9 páginasEmbedded SystemMayukh santraAinda não há avaliações
- PPTDocumento14 páginasPPTAnil RaghuvaranAinda não há avaliações
- Exam Paper Leakage ProtectionDocumento6 páginasExam Paper Leakage ProtectionvarshakulkarniAinda não há avaliações
- 03.PIR and GSM Based House Security SystemDocumento4 páginas03.PIR and GSM Based House Security SystemkranthirishiAinda não há avaliações
- PC Controlled RobotDocumento51 páginasPC Controlled RobotmahammadvasimkAinda não há avaliações
- Voice Based NoticeDocumento9 páginasVoice Based NoticeAnjaliTripathi0% (1)
- Pce Mini Project Report: "RF Transmitter and Receiver"Documento9 páginasPce Mini Project Report: "RF Transmitter and Receiver"sumit sanchetiAinda não há avaliações
- Digital Clock Using 8051 Microcontroller With RTCDocumento47 páginasDigital Clock Using 8051 Microcontroller With RTCsiddharthAinda não há avaliações
- MPPT Using Sepic ConverterDocumento109 páginasMPPT Using Sepic ConverterSandhya RevuriAinda não há avaliações
- Rotating Solar Inverter Project Using Microcontroller 50WDocumento4 páginasRotating Solar Inverter Project Using Microcontroller 50Whamed raza0% (1)
- Vishnu KPDocumento22 páginasVishnu KPSufail AAinda não há avaliações
- Password Typer Using ArduinoDocumento25 páginasPassword Typer Using ArduinoVasanthVaseAinda não há avaliações
- Electric Lineman SafetyDocumento10 páginasElectric Lineman SafetySandhya Rani ChagamreddyAinda não há avaliações
- Embedded System Industrial Trainng ReportDocumento102 páginasEmbedded System Industrial Trainng ReportSurinder Singh Bindra50% (4)
- Interrupt Driven IoDocumento15 páginasInterrupt Driven IoMunie RosnanAinda não há avaliações
- Dam GateDocumento18 páginasDam GateAbdul Razzak100% (1)
- Android Based Bluetooth Door Lock Using Arduino PDF Documentation PDFDocumento1 páginaAndroid Based Bluetooth Door Lock Using Arduino PDF Documentation PDFRendel NalanganAinda não há avaliações
- ArmDocumento46 páginasArmKarthik KarthiksAinda não há avaliações
- Controlling of AC Lamp Dimmer Through Mobile Phone: FeaturesDocumento2 páginasControlling of AC Lamp Dimmer Through Mobile Phone: FeaturesHari KishorAinda não há avaliações
- Vlsi-Chip Input and Output CircuitsDocumento27 páginasVlsi-Chip Input and Output CircuitsSrilatha KolliAinda não há avaliações
- RF Based Smart Zone Vehicle Speed Monitoring and Control SystemDocumento2 páginasRF Based Smart Zone Vehicle Speed Monitoring and Control Systemieee4mybusinessonlyAinda não há avaliações
- Advanced Electronic Protection System To Prevent Exam Paper LeakagesDocumento135 páginasAdvanced Electronic Protection System To Prevent Exam Paper LeakagesSyed Viquar AhmedAinda não há avaliações
- GSM Based Automatic Irrigation System Using 8051 MicrocontrollerDocumento6 páginasGSM Based Automatic Irrigation System Using 8051 Microcontrolleramism24100% (1)
- Bluetooth Energy MeterDocumento36 páginasBluetooth Energy Meterchandra gupt sharma50% (2)
- Digital Fan RegulatorDocumento31 páginasDigital Fan RegulatorManoj GurralaAinda não há avaliações
- Arduino Based Heart Beat SensorDocumento21 páginasArduino Based Heart Beat SensorSandeep KumarAinda não há avaliações
- Radar System Using Arduino: Project ReportDocumento31 páginasRadar System Using Arduino: Project ReportpoojaAinda não há avaliações
- Mini Project Presentation On: Bidirectional Visitor Counter With GSM ModuleDocumento26 páginasMini Project Presentation On: Bidirectional Visitor Counter With GSM ModuleSYED SHABAZ 1DS19EC438Ainda não há avaliações
- DC Motor CTRL Using Single SwitchDocumento44 páginasDC Motor CTRL Using Single SwitchAbhijeet NayakAinda não há avaliações
- LandmineDocumento17 páginasLandminePooja GAinda não há avaliações
- 21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemDocumento6 páginas21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemImpact JournalsAinda não há avaliações
- Automatic Traffic Light Control UsingDocumento35 páginasAutomatic Traffic Light Control UsingDilyalew DebreworkAinda não há avaliações
- GSM Based Fire Fighting RobotDocumento35 páginasGSM Based Fire Fighting RobotRaushanVijaySingh100% (1)
- Design and Implement A Smart Blind StickDocumento7 páginasDesign and Implement A Smart Blind StickbizunehAinda não há avaliações
- Smart Notice BoardDocumento42 páginasSmart Notice BoardDhiraj BhattAinda não há avaliações
- Smarrt IrrigationDocumento13 páginasSmarrt IrrigationGudipadu SudhakarAinda não há avaliações
- Report of Training ON Arduino Platform and C ProgrammingDocumento12 páginasReport of Training ON Arduino Platform and C Programmingraman Mehta100% (1)
- GSM-Based Security SystemDocumento98 páginasGSM-Based Security Systemthab Paqura100% (5)
- Gourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleDocumento19 páginasGourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleRaj MandloiAinda não há avaliações
- Automated Toll Collection System Based On RFID SensorDocumento16 páginasAutomated Toll Collection System Based On RFID SensorAnkit SinghAinda não há avaliações
- 13 IoT Based Electrical Device Surveillance and Control SystemDocumento3 páginas13 IoT Based Electrical Device Surveillance and Control SystemdileeppatraAinda não há avaliações
- Acs PDFDocumento2 páginasAcs PDFAkshay PowarAinda não há avaliações
- Voice Controlled RobotDocumento62 páginasVoice Controlled RobotSami Zama100% (1)
- An Area Efficient Universal Cryptography Processor For Smart CardsDocumento87 páginasAn Area Efficient Universal Cryptography Processor For Smart Cardsnagaharika25930% (1)
- GSM Based Industrial Security SystemDocumento3 páginasGSM Based Industrial Security SystemInternational Journal of Innovations in Engineering and ScienceAinda não há avaliações
- Solar Powered Grass Cutter and Pesticide Spreading RobotDocumento4 páginasSolar Powered Grass Cutter and Pesticide Spreading RobotNeha SurwaseAinda não há avaliações
- Home Automation Using Hand GestureDocumento19 páginasHome Automation Using Hand GestureChandrashekhar KatagiAinda não há avaliações
- Voice Controlled Car: BS Documentation by Hammad Malik (F16-1244) Arslan Ali (F16-1160) Hassam Akram (F16-1153)Documento16 páginasVoice Controlled Car: BS Documentation by Hammad Malik (F16-1244) Arslan Ali (F16-1160) Hassam Akram (F16-1153)Rana Arslan100% (1)
- Smart Material Systems and MEMS: Design and Development MethodologiesNo EverandSmart Material Systems and MEMS: Design and Development MethodologiesAinda não há avaliações
- 4.9 The Joukowski Mapping: Circles To EllipsesDocumento12 páginas4.9 The Joukowski Mapping: Circles To EllipsesPerita CromagnoliAinda não há avaliações
- Opnet BasicsDocumento9 páginasOpnet BasicsDuong Duc HungAinda não há avaliações
- 7. Sách 35 Đề Minh Họa 2020 - GV Trang AnhDocumento771 páginas7. Sách 35 Đề Minh Họa 2020 - GV Trang AnhNhi CậnAinda não há avaliações
- Autism Awareness Carousel Project ProposalDocumento5 páginasAutism Awareness Carousel Project ProposalMargaret Franklin100% (1)
- Arlene Dickinson, All inDocumento2 páginasArlene Dickinson, All inkinayath@yahoo.comAinda não há avaliações
- Internal Audit Report Template 1Documento8 páginasInternal Audit Report Template 1Zia MalikAinda não há avaliações
- 1) 64 Bit Ripple Carry Adder Code With OutputDocumento4 páginas1) 64 Bit Ripple Carry Adder Code With OutputKALAIPRIYAN MAinda não há avaliações
- Importing Customers Vendors EmployeesDocumento6 páginasImporting Customers Vendors EmployeesIslam SultanAinda não há avaliações
- Course Concessions and Public Private Partnerships (PPP) in Water SectorDocumento3 páginasCourse Concessions and Public Private Partnerships (PPP) in Water SectorMihai MihailescuAinda não há avaliações
- AmoebaDocumento7 páginasAmoebaIgnac RobertovichAinda não há avaliações
- Afghanistan Analyst Bibliography 2011Documento240 páginasAfghanistan Analyst Bibliography 2011easterncampaignAinda não há avaliações
- Population, Sample and Sampling TechniquesDocumento8 páginasPopulation, Sample and Sampling TechniquesMuhammad TalhaAinda não há avaliações
- Signal BoosterDocumento1 páginaSignal BoosteronlinedataAinda não há avaliações
- Converting .Mp4 Movies With VLCDocumento5 páginasConverting .Mp4 Movies With VLCrazvan_nAinda não há avaliações
- Labor Economics ManualDocumento97 páginasLabor Economics ManualLam Wai Kuen100% (3)
- The SophistsDocumento16 páginasThe SophistsWella Wella Wella100% (1)
- Final SPKDocumento9 páginasFinal SPKAinul qalbiAinda não há avaliações
- Castellated Beam: Cell Form: Ds 0.25 DsDocumento2 páginasCastellated Beam: Cell Form: Ds 0.25 DsعلياسماعيلAinda não há avaliações
- HIRARC - Yawar Hassan KhanDocumento11 páginasHIRARC - Yawar Hassan KhanCyberMissio StudiosAinda não há avaliações
- Physics of CheerleadingDocumento1 páginaPhysics of CheerleadingMarniella BeridoAinda não há avaliações
- Mfuzzgui PDFDocumento7 páginasMfuzzgui PDFMohammad RofiiAinda não há avaliações
- African Handbook-TextDocumento164 páginasAfrican Handbook-TextThe_Castle_Of_Letter100% (1)
- BIM Project Execution Planning Guide and Templates - V2.1Documento1 páginaBIM Project Execution Planning Guide and Templates - V2.1NajaAlwi100% (1)
- Ich GuidelinesDocumento5 páginasIch GuidelinesdrdeeptisharmaAinda não há avaliações
- HHJNDocumento6 páginasHHJNDavid Maldonado GuzmanAinda não há avaliações
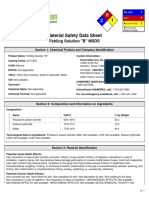
- Fehling Solution "B" MSDS: Section 1: Chemical Product and Company IdentificationDocumento6 páginasFehling Solution "B" MSDS: Section 1: Chemical Product and Company IdentificationAnnisaAinda não há avaliações
- The High Frequency Active Auroral Research ProgramDocumento2 páginasThe High Frequency Active Auroral Research Programranahamza22100% (1)
- Proceedings of The Society For Medieval Logic & Metaphysics 3Documento81 páginasProceedings of The Society For Medieval Logic & Metaphysics 3MeatredAinda não há avaliações
- Model Curriculum Vitae and Resume For Law Student GraduatesDocumento2 páginasModel Curriculum Vitae and Resume For Law Student GraduatesSnehal SinghAinda não há avaliações
- Concept Quiz GeotechDocumento3 páginasConcept Quiz GeotechanjibeeAinda não há avaliações