Você também pode gostar
- Fault Tolerant TTCANDocumento8 páginasFault Tolerant TTCANPOWERBASEAinda não há avaliações
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksAinda não há avaliações
- TTCANDocumento15 páginasTTCANyash1239Ainda não há avaliações
- Ttcan: Time Triggered Controller Area Network (Ttcan)Documento40 páginasTtcan: Time Triggered Controller Area Network (Ttcan)Simmi Joshi100% (2)
- D G Seminar UltimateDocumento42 páginasD G Seminar UltimateIrshad AhmedAinda não há avaliações
- Time-Triggered CAN: TTCAN BenefitsDocumento26 páginasTime-Triggered CAN: TTCAN BenefitsPadmaja VenkataramanAinda não há avaliações
- Precision Time Protocol (PTP) New VersionDocumento14 páginasPrecision Time Protocol (PTP) New Versionnaman guptaAinda não há avaliações
- Steiner Sensors 2010Documento4 páginasSteiner Sensors 2010DomRuanAinda não há avaliações
- Steiner Sensors 2010Documento4 páginasSteiner Sensors 2010DomRuanAinda não há avaliações
- Steiner Sensors 2010Documento4 páginasSteiner Sensors 2010DomRuanAinda não há avaliações
- Scheduling For A TTCAN Network With A Stochastic Optimization AlgorithmDocumento7 páginasScheduling For A TTCAN Network With A Stochastic Optimization AlgorithmPOWERBASEAinda não há avaliações
- Injection Time Planning - Making CQF Practical in Time-Sensitive NetworkingDocumento10 páginasInjection Time Planning - Making CQF Practical in Time-Sensitive Networkingsmyethdrath24Ainda não há avaliações
- Manual 5020MGC 02 04Documento51 páginasManual 5020MGC 02 04consultachAinda não há avaliações
- 05 - Serial Data Transmission - E0808f PDFDocumento41 páginas05 - Serial Data Transmission - E0808f PDFedgardoboieroAinda não há avaliações
- Can Dictionary PDFDocumento42 páginasCan Dictionary PDFlethanhtu0105Ainda não há avaliações
- CEG5103 EE5023 L2-MediumAccessControl - Ann220124Documento18 páginasCEG5103 EE5023 L2-MediumAccessControl - Ann220124xuwumiao7Ainda não há avaliações
- Adn004 PDFDocumento2 páginasAdn004 PDFJosé AdelinoAinda não há avaliações
- EV DO System Messages 20050106 A 1.0Documento14 páginasEV DO System Messages 20050106 A 1.0vibhoreaggarwalAinda não há avaliações
- Cambium PTP670 Precsion Timing WhitePaperDocumento11 páginasCambium PTP670 Precsion Timing WhitePaperKalyan VaddagiriAinda não há avaliações
- Can ControllerDocumento13 páginasCan Controllerjit_72Ainda não há avaliações
- Chapter-1: 1.1 Non Real Time Operating SystemsDocumento58 páginasChapter-1: 1.1 Non Real Time Operating SystemsAnonymous XybLZfAinda não há avaliações
- 2marks MC FullDocumento15 páginas2marks MC FullSid VibhorAinda não há avaliações
- 02b-3gatm - Atm Protocols and Signalling - 6-66215Documento38 páginas02b-3gatm - Atm Protocols and Signalling - 6-66215Mukul MandalAinda não há avaliações
- REAL TIME EMBEDDED SYSTEM - Lec6Documento18 páginasREAL TIME EMBEDDED SYSTEM - Lec6parthasarothi_sikder79Ainda não há avaliações
- CAN Bus NeuralDocumento6 páginasCAN Bus Neuraltssskk1976Ainda não há avaliações
- Design of Multifunction Vehicle Bus Controller: Abstract. The Train Communication Network (TCN) Is Widely Used in HighDocumento7 páginasDesign of Multifunction Vehicle Bus Controller: Abstract. The Train Communication Network (TCN) Is Widely Used in Higherode els erodeAinda não há avaliações
- Clock Domain Crossing Verification WPDocumento6 páginasClock Domain Crossing Verification WPTuan NamAinda não há avaliações
- A Hybrid MAC Protocol For Wireless Sensor Network: Minsheng Tan Liang TangDocumento5 páginasA Hybrid MAC Protocol For Wireless Sensor Network: Minsheng Tan Liang TangZaineb AlaniAinda não há avaliações
- FPGA Based Architecture For Radar's STC, FTC and Gain ModulesDocumento7 páginasFPGA Based Architecture For Radar's STC, FTC and Gain Modulesh.moradmand4458Ainda não há avaliações
- Infineon-Component Controller Area Network V2.10-Software Module Datasheets-V03 00-EnDocumento40 páginasInfineon-Component Controller Area Network V2.10-Software Module Datasheets-V03 00-Ensmitianraj2005Ainda não há avaliações
- 2 Real-Time Control System and Real-Time NetworksDocumento7 páginas2 Real-Time Control System and Real-Time NetworksSam eagle goodAinda não há avaliações
- Precision Time Protocol: IEEE1588v2 TICTOC BOF IETF Prague 2007 Ron Cohen Resolute NetworksDocumento22 páginasPrecision Time Protocol: IEEE1588v2 TICTOC BOF IETF Prague 2007 Ron Cohen Resolute Networkspankaj5121990Ainda não há avaliações
- UA08 1 RNC Paging Engineering Guidelines V02Documento84 páginasUA08 1 RNC Paging Engineering Guidelines V02SORO YALAMOUSSAAinda não há avaliações
- AN1208: Choosing The Correct Oscillator To Meet Your IEEE 1588v2 Network Synchronization Holdover RequirementsDocumento17 páginasAN1208: Choosing The Correct Oscillator To Meet Your IEEE 1588v2 Network Synchronization Holdover Requirementsreza_azadAinda não há avaliações
- Feel Safe PlanningDocumento14 páginasFeel Safe PlanningDiamond SalehAinda não há avaliações
- Controller Area Network (CAN)Documento10 páginasController Area Network (CAN)api-3754722100% (3)
- G005 Synchronization 15PDocumento15 páginasG005 Synchronization 15PDavoodAinda não há avaliações
- FlexRay Protocol Specification V3 0 1Documento326 páginasFlexRay Protocol Specification V3 0 1Siri MissuAinda não há avaliações
- Timing and Sync Over PSNDocumento48 páginasTiming and Sync Over PSNmeo_omhtAinda não há avaliações
- mcp2515 Avr Can Spi PDFDocumento31 páginasmcp2515 Avr Can Spi PDFcaubiosAinda não há avaliações
- CX2006v6.0 Sentinel DSDocumento5 páginasCX2006v6.0 Sentinel DS陈双明Ainda não há avaliações
- ARTIGO - Real-Time Decentralized Control With CAN PDFDocumento7 páginasARTIGO - Real-Time Decentralized Control With CAN PDFDAN_73Ainda não há avaliações
- Lstfcodel: Codel With Lstf-Style Priority Queuing: Christen FordDocumento10 páginasLstfcodel: Codel With Lstf-Style Priority Queuing: Christen FordPathragukAinda não há avaliações
- An-InD-1-004 Diagnostics Via Gateway in CANoeDocumento80 páginasAn-InD-1-004 Diagnostics Via Gateway in CANoeUpendra VaddeAinda não há avaliações
- Features: Controller Area Network (CAN)Documento39 páginasFeatures: Controller Area Network (CAN)alejandroAinda não há avaliações
- CAN-Ethernet Architectures For Real-Time Applications: October 2005Documento9 páginasCAN-Ethernet Architectures For Real-Time Applications: October 2005Juan MartínAinda não há avaliações
- Ttcan ExplainedDocumento17 páginasTtcan ExplainedMADDYAinda não há avaliações
- Design and Implementation of CAN Bit Timing LogicDocumento2 páginasDesign and Implementation of CAN Bit Timing LogicLonely ClasherAinda não há avaliações
- Article 2 Kalray MPPADocumento6 páginasArticle 2 Kalray MPPAhelinAinda não há avaliações
- Approaches To Support Real Time TrafficDocumento4 páginasApproaches To Support Real Time TrafficJason HouseAinda não há avaliações
- An Improved TMAC Protocol For Wireless Sensor NetworksDocumento5 páginasAn Improved TMAC Protocol For Wireless Sensor NetworkssubhampandaAinda não há avaliações
- Flexible Time Triggered Protocol For CANDocumento8 páginasFlexible Time Triggered Protocol For CANAriana Ribeiro LameirinhasAinda não há avaliações
- AN-ISC-8-1095 CRC Check With CANbedded CAN StackDocumento8 páginasAN-ISC-8-1095 CRC Check With CANbedded CAN Stackqplygxlj9Ainda não há avaliações
- TC Modular Series For BACnet NetworksDocumento9 páginasTC Modular Series For BACnet NetworksMark Izsm AmersonAinda não há avaliações
- Protocol IEC 60870 5 104 MasterDocumento12 páginasProtocol IEC 60870 5 104 MasterNguyễn NamAinda não há avaliações
- LTEDocumento57 páginasLTEarvindsarvesh207645Ainda não há avaliações
- Abstract Timers and Their Implementation Onto The Arm Cortex-M Family of McusDocumento6 páginasAbstract Timers and Their Implementation Onto The Arm Cortex-M Family of McusDheereshAinda não há avaliações
- The Car Is Like A Human Body:: The CAN Bus History in ShortDocumento8 páginasThe Car Is Like A Human Body:: The CAN Bus History in Shortpunit_scribd71Ainda não há avaliações
- 01-Chapter 1 H.248Documento22 páginas01-Chapter 1 H.248aranibarm67% (3)
- The Configuration of Can BitDocumento10 páginasThe Configuration of Can BitPOWERBASEAinda não há avaliações
- Scheduling For A TTCAN Network With A Stochastic Optimization AlgorithmDocumento7 páginasScheduling For A TTCAN Network With A Stochastic Optimization AlgorithmPOWERBASEAinda não há avaliações
- Control Area Network IntroDocumento8 páginasControl Area Network IntroPOWERBASE100% (1)
- Galep 4Documento37 páginasGalep 4anon-219489100% (4)
- Compiler Design Concepts, Worked Out Examples and Mcqs For Net/SetDocumento101 páginasCompiler Design Concepts, Worked Out Examples and Mcqs For Net/SetRobelAinda não há avaliações
- DTSC-200A ATS Controller: ConfigurationDocumento166 páginasDTSC-200A ATS Controller: ConfigurationHendiko PanggabeanAinda não há avaliações
- DTHUB API Automation CourseDocumento13 páginasDTHUB API Automation CourseHarry HarryAinda não há avaliações
- Computer Fundamentals MODULE 1 LESSON 1Documento7 páginasComputer Fundamentals MODULE 1 LESSON 1Delia PenoringanAinda não há avaliações
- Instruction Leaflet For Modbus Power Monitoring/ Metering Module (PM3) For FD, JG, and KD/LG Circuit Breakers and Motor Circuit ProtectorsDocumento20 páginasInstruction Leaflet For Modbus Power Monitoring/ Metering Module (PM3) For FD, JG, and KD/LG Circuit Breakers and Motor Circuit ProtectorsMichael BesaAinda não há avaliações
- 华南X99 F8D主板说明书 9Documento1 página华南X99 F8D主板说明书 9messiahsAinda não há avaliações
- Micro-Controller Lesson-1Documento1 páginaMicro-Controller Lesson-1Engr Shehzad HaneefAinda não há avaliações
- CCBoot Manual - TroubleshootsDocumento272 páginasCCBoot Manual - TroubleshootsHasnan IbrahimAinda não há avaliações
- Protocol Dp25 Dp05 Dp500 Dp500lDocumento32 páginasProtocol Dp25 Dp05 Dp500 Dp500lRoStarAinda não há avaliações
- Ccna Sec 1.1Documento231 páginasCcna Sec 1.1loffy hackerAinda não há avaliações
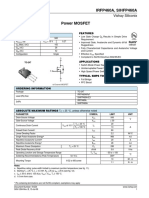
- Vishay IRFP460APBF Datasheet PDFDocumento8 páginasVishay IRFP460APBF Datasheet PDFkamel keddarAinda não há avaliações
- ADM12864HDocumento14 páginasADM12864HluinksAinda não há avaliações
- Motro & Drives - Fall EditionDocumento59 páginasMotro & Drives - Fall EditionHavandinhAinda não há avaliações
- Dell Inspiron N5110 Service ManualDocumento45 páginasDell Inspiron N5110 Service ManualMichael Daniel Espinoza BetancoAinda não há avaliações
- Inscriber® Titleone™ XT: Cost-Effective, Single-Channel 2D Character GeneratorDocumento7 páginasInscriber® Titleone™ XT: Cost-Effective, Single-Channel 2D Character GeneratorstreamlayAinda não há avaliações
- NAPALM Documentation: Release 3Documento94 páginasNAPALM Documentation: Release 3daryl emaniAinda não há avaliações
- CSE 2005 - Operating Systems Lab Final Assessment TestDocumento3 páginasCSE 2005 - Operating Systems Lab Final Assessment TestMansi SinghAinda não há avaliações
- 18 DiplexorDocumento3 páginas18 DiplexorFernando GutiérrezAinda não há avaliações
- Eyeball Based Cursor Movement ControlDocumento5 páginasEyeball Based Cursor Movement ControlVijay VijjuAinda não há avaliações
- Apache Spark Analytics Made SimpleDocumento76 páginasApache Spark Analytics Made SimpleNaceur ElAinda não há avaliações
- 25Q32BVDocumento78 páginas25Q32BVVictor GarciaAinda não há avaliações
- Arithmetic Logic UnitDocumento5 páginasArithmetic Logic UnitNarendra AchariAinda não há avaliações
- 7.2 Single-Phase Diode RectifiersDocumento32 páginas7.2 Single-Phase Diode RectifiersTrương Anh DuyAinda não há avaliações
- 12 Task Performance 1final Exam ARG TANTAYDocumento4 páginas12 Task Performance 1final Exam ARG TANTAYJerick SolimanAinda não há avaliações
- Ampliacion M61X0001Documento2 páginasAmpliacion M61X0001Jose Carlos Ortiz RojasAinda não há avaliações
- FCUBS Database Practices - db12c PDFDocumento37 páginasFCUBS Database Practices - db12c PDFjosephAinda não há avaliações
- Easy Data Exchange Via Festo Easyip: Festo Ag & Co - KGDocumento11 páginasEasy Data Exchange Via Festo Easyip: Festo Ag & Co - KGFFlipooxAinda não há avaliações
- Bipolar Junction TransistorDocumento27 páginasBipolar Junction TransistorBlank CoderAinda não há avaliações
- PlotShareOneDX v2.02 Install Guide v100Documento3 páginasPlotShareOneDX v2.02 Install Guide v100TestoutAinda não há avaliações
- FreeBSD Cheat SheetDocumento2 páginasFreeBSD Cheat Sheetcemerlang satuAinda não há avaliações
- Summary of The Anxious Generation by Jonathan Haidt: How the Great Rewiring of Childhood Is Causing an Epidemic of Mental IllnessNo EverandSummary of The Anxious Generation by Jonathan Haidt: How the Great Rewiring of Childhood Is Causing an Epidemic of Mental IllnessAinda não há avaliações
- Summary: Atomic Habits by James Clear: An Easy & Proven Way to Build Good Habits & Break Bad OnesNo EverandSummary: Atomic Habits by James Clear: An Easy & Proven Way to Build Good Habits & Break Bad OnesNota: 5 de 5 estrelas5/5 (1636)
- Summary of The Algebra of Wealth by Scott Galloway: A Simple Formula for Financial SecurityNo EverandSummary of The Algebra of Wealth by Scott Galloway: A Simple Formula for Financial SecurityAinda não há avaliações
- The One Thing: The Surprisingly Simple Truth Behind Extraordinary ResultsNo EverandThe One Thing: The Surprisingly Simple Truth Behind Extraordinary ResultsNota: 4.5 de 5 estrelas4.5/5 (709)
- Can't Hurt Me by David Goggins - Book Summary: Master Your Mind and Defy the OddsNo EverandCan't Hurt Me by David Goggins - Book Summary: Master Your Mind and Defy the OddsNota: 4.5 de 5 estrelas4.5/5 (384)
- Summary of The New Menopause by Mary Claire Haver MD: Navigating Your Path Through Hormonal Change with Purpose, Power, and FactsNo EverandSummary of The New Menopause by Mary Claire Haver MD: Navigating Your Path Through Hormonal Change with Purpose, Power, and FactsAinda não há avaliações
- The Compound Effect by Darren Hardy - Book Summary: Jumpstart Your Income, Your Life, Your SuccessNo EverandThe Compound Effect by Darren Hardy - Book Summary: Jumpstart Your Income, Your Life, Your SuccessNota: 5 de 5 estrelas5/5 (456)
- The War of Art by Steven Pressfield - Book Summary: Break Through The Blocks And Win Your Inner Creative BattlesNo EverandThe War of Art by Steven Pressfield - Book Summary: Break Through The Blocks And Win Your Inner Creative BattlesNota: 4.5 de 5 estrelas4.5/5 (274)
- The Whole-Brain Child by Daniel J. Siegel, M.D., and Tina Payne Bryson, PhD. - Book Summary: 12 Revolutionary Strategies to Nurture Your Child’s Developing MindNo EverandThe Whole-Brain Child by Daniel J. Siegel, M.D., and Tina Payne Bryson, PhD. - Book Summary: 12 Revolutionary Strategies to Nurture Your Child’s Developing MindNota: 4.5 de 5 estrelas4.5/5 (57)
- Mindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessNo EverandMindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessNota: 4.5 de 5 estrelas4.5/5 (328)
- Summary of 12 Rules for Life: An Antidote to ChaosNo EverandSummary of 12 Rules for Life: An Antidote to ChaosNota: 4.5 de 5 estrelas4.5/5 (294)
- The Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaNo EverandThe Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaNota: 4.5 de 5 estrelas4.5/5 (266)
- Summary of Atomic Habits by James ClearNo EverandSummary of Atomic Habits by James ClearNota: 5 de 5 estrelas5/5 (169)
- Book Summary of Ego Is The Enemy by Ryan HolidayNo EverandBook Summary of Ego Is The Enemy by Ryan HolidayNota: 4.5 de 5 estrelas4.5/5 (387)
- Summary of Miracle Morning Millionaires: What the Wealthy Do Before 8AM That Will Make You Rich by Hal Elrod and David OsbornNo EverandSummary of Miracle Morning Millionaires: What the Wealthy Do Before 8AM That Will Make You Rich by Hal Elrod and David OsbornNota: 5 de 5 estrelas5/5 (201)
- How To Win Friends and Influence People by Dale Carnegie - Book SummaryNo EverandHow To Win Friends and Influence People by Dale Carnegie - Book SummaryNota: 5 de 5 estrelas5/5 (557)
- Extreme Ownership by Jocko Willink and Leif Babin - Book Summary: How U.S. Navy SEALS Lead And WinNo EverandExtreme Ownership by Jocko Willink and Leif Babin - Book Summary: How U.S. Navy SEALS Lead And WinNota: 4.5 de 5 estrelas4.5/5 (75)
- Summary of The Galveston Diet by Mary Claire Haver MD: The Doctor-Developed, Patient-Proven Plan to Burn Fat and Tame Your Hormonal SymptomsNo EverandSummary of The Galveston Diet by Mary Claire Haver MD: The Doctor-Developed, Patient-Proven Plan to Burn Fat and Tame Your Hormonal SymptomsAinda não há avaliações
- Summary of When Things Fall Apart: Heart Advice for Difficult Times by Pema ChödrönNo EverandSummary of When Things Fall Apart: Heart Advice for Difficult Times by Pema ChödrönNota: 4.5 de 5 estrelas4.5/5 (22)
- Summary of Million Dollar Weekend by Noah Kagan and Tahl Raz: The Surprisingly Simple Way to Launch a 7-Figure Business in 48 HoursNo EverandSummary of Million Dollar Weekend by Noah Kagan and Tahl Raz: The Surprisingly Simple Way to Launch a 7-Figure Business in 48 HoursAinda não há avaliações
- Designing Your Life by Bill Burnett, Dave Evans - Book Summary: How to Build a Well-Lived, Joyful LifeNo EverandDesigning Your Life by Bill Burnett, Dave Evans - Book Summary: How to Build a Well-Lived, Joyful LifeNota: 4.5 de 5 estrelas4.5/5 (62)
- Steal Like an Artist by Austin Kleon - Book Summary: 10 Things Nobody Told You About Being CreativeNo EverandSteal Like an Artist by Austin Kleon - Book Summary: 10 Things Nobody Told You About Being CreativeNota: 4.5 de 5 estrelas4.5/5 (128)
- Essentialism by Greg McKeown - Book Summary: The Disciplined Pursuit of LessNo EverandEssentialism by Greg McKeown - Book Summary: The Disciplined Pursuit of LessNota: 4.5 de 5 estrelas4.5/5 (188)
- The 5 Second Rule by Mel Robbins - Book Summary: Transform Your Life, Work, and Confidence with Everyday CourageNo EverandThe 5 Second Rule by Mel Robbins - Book Summary: Transform Your Life, Work, and Confidence with Everyday CourageNota: 4.5 de 5 estrelas4.5/5 (329)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningNo EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningNota: 4.5 de 5 estrelas4.5/5 (55)
- SUMMARY: So Good They Can't Ignore You (UNOFFICIAL SUMMARY: Lesson from Cal Newport)No EverandSUMMARY: So Good They Can't Ignore You (UNOFFICIAL SUMMARY: Lesson from Cal Newport)Nota: 4.5 de 5 estrelas4.5/5 (14)
- Summary of Supercommunicators by Charles Duhigg: How to Unlock the Secret Language of ConnectionNo EverandSummary of Supercommunicators by Charles Duhigg: How to Unlock the Secret Language of ConnectionAinda não há avaliações
- Blink by Malcolm Gladwell - Book Summary: The Power of Thinking Without ThinkingNo EverandBlink by Malcolm Gladwell - Book Summary: The Power of Thinking Without ThinkingNota: 4.5 de 5 estrelas4.5/5 (114)