Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Guide To Design Criteria For Bolts and Riveted JointsDocumento352 páginasGuide To Design Criteria For Bolts and Riveted JointsHomero Silva96% (24)
- Electromagnetic Testing EMT All PDFDocumento3.092 páginasElectromagnetic Testing EMT All PDFYoungmin ParkAinda não há avaliações
- Analysis of Vortex-Induced Vibrations of RisersDocumento70 páginasAnalysis of Vortex-Induced Vibrations of RisersKuan Tek SeangAinda não há avaliações
- Order Tracking AnalysisDocumento51 páginasOrder Tracking AnalysisWon-young SeoAinda não há avaliações
- ASME SpreaderBar CalcsDocumento5 páginasASME SpreaderBar Calcsganesh100% (1)
- Configure High-Speed Counter InstructionsDocumento10 páginasConfigure High-Speed Counter InstructionsMd. Tauhidul IslamAinda não há avaliações
- A Primer On v2k and Mind-Reading Technologies - Part IDocumento15 páginasA Primer On v2k and Mind-Reading Technologies - Part IAnthony Forwood100% (4)
- Analysis of Vibration-Induced Fatigue Cracking in Steel BridgesDocumento88 páginasAnalysis of Vibration-Induced Fatigue Cracking in Steel BridgesKuan Tek SeangAinda não há avaliações
- Optimization of Performance Through Kinematic Analysis of The Different Phases of The 100 MDocumento10 páginasOptimization of Performance Through Kinematic Analysis of The Different Phases of The 100 MChristine BrooksAinda não há avaliações
- Reliability Standards Complete Set-NERCDocumento1.841 páginasReliability Standards Complete Set-NERCSohom Datta100% (2)
- Begley Plasticity FrettingDocumento20 páginasBegley Plasticity FrettingKuan Tek SeangAinda não há avaliações
- Aiaa 2010 215Documento15 páginasAiaa 2010 215Kuan Tek SeangAinda não há avaliações
- Chunjun 2009Documento80 páginasChunjun 2009André PachecoAinda não há avaliações
- 08 Chapter 8Documento44 páginas08 Chapter 8Kuan Tek SeangAinda não há avaliações
- Wrap Thesis Dirlik 1985Documento242 páginasWrap Thesis Dirlik 1985jpalfanoAinda não há avaliações
- Neuber Method For FatigueDocumento12 páginasNeuber Method For FatigueKuan Tek SeangAinda não há avaliações
- Rizzi Equivalent Linearization FatigueDocumento13 páginasRizzi Equivalent Linearization FatigueKuan Tek SeangAinda não há avaliações
- Elastoplastic AnalysisDocumento46 páginasElastoplastic AnalysisKuan Tek SeangAinda não há avaliações
- DNV 2010 Riser Fatigue RP-F204Documento34 páginasDNV 2010 Riser Fatigue RP-F204sujan_duttaAinda não há avaliações
- AISC (1989) and ANSI/AWS D14.1.Documento45 páginasAISC (1989) and ANSI/AWS D14.1.Kuan Tek SeangAinda não há avaliações
- Hreaded Fastener Is Used As The PinDocumento17 páginasHreaded Fastener Is Used As The PinKuan Tek SeangAinda não há avaliações
- Avendano Ovalle ThesisDocumento134 páginasAvendano Ovalle ThesisKuan Tek SeangAinda não há avaliações
- Chunjun 2009Documento80 páginasChunjun 2009André PachecoAinda não há avaliações
- Using FEA Results For Fatigue AnalysisDocumento7 páginasUsing FEA Results For Fatigue AnalysisKuan Tek SeangAinda não há avaliações
- Neuber Method For FatigueDocumento12 páginasNeuber Method For FatigueKuan Tek SeangAinda não há avaliações
- Abaqus Tensile Thesis PDFDocumento61 páginasAbaqus Tensile Thesis PDFDeniz AktaşAinda não há avaliações
- Ctc816 Uk Wave Energy ResourceDocumento66 páginasCtc816 Uk Wave Energy ResourceKuan Tek SeangAinda não há avaliações
- Determination of Static Limiting Load Curves For Slewing Bearing With Application of The Finite Element MethodDocumento7 páginasDetermination of Static Limiting Load Curves For Slewing Bearing With Application of The Finite Element MethodKuan Tek SeangAinda não há avaliações
- Bannantine SocieDocumento20 páginasBannantine SocieKuan Tek SeangAinda não há avaliações
- WTC2005 63196Documento2 páginasWTC2005 63196Kuan Tek SeangAinda não há avaliações
- Contact Seminar AbaqusDocumento325 páginasContact Seminar AbaqusKuan Tek Seang67% (3)
- Multiaxial Fatigue UGM May 2012 Heyes Compatibility ModeDocumento18 páginasMultiaxial Fatigue UGM May 2012 Heyes Compatibility ModeKuan Tek SeangAinda não há avaliações
- Socie 3.0 Multiaxial FatigueDocumento127 páginasSocie 3.0 Multiaxial FatigueKuan Tek Seang50% (2)
- DNV 2010 Riser Fatigue RP-F204Documento34 páginasDNV 2010 Riser Fatigue RP-F204sujan_duttaAinda não há avaliações
- Us 7944067Documento13 páginasUs 7944067Kuan Tek SeangAinda não há avaliações
- Comparison of Different Structural Stress Approaches For Fatigue Assessment of Welded Ship StructuresDocumento16 páginasComparison of Different Structural Stress Approaches For Fatigue Assessment of Welded Ship StructuresKuan Tek SeangAinda não há avaliações
- INVDRT034 MoveVelocityHz FreeDocumento3 páginasINVDRT034 MoveVelocityHz FreeRaul ArbaniesAinda não há avaliações
- General Physics 1 Exam 2121 2021 2022Documento31 páginasGeneral Physics 1 Exam 2121 2021 2022Angela PalamosAinda não há avaliações
- Spectroscopy and the Electromagnetic Spectrum GuideDocumento36 páginasSpectroscopy and the Electromagnetic Spectrum GuideOctavio GilAinda não há avaliações
- Design of Ribbon MicrophoneDocumento9 páginasDesign of Ribbon MicrophonemerrickAinda não há avaliações
- FMDC Past Paper PakLearningSpotDocumento17 páginasFMDC Past Paper PakLearningSpotMuneeb UlHasaanAinda não há avaliações
- Astm d4935-10 百度文库Documento13 páginasAstm d4935-10 百度文库Wahyu SipahutarAinda não há avaliações
- RF Power Meter ManualDocumento10 páginasRF Power Meter Manualsalvatore dalessandroAinda não há avaliações
- Physics Notes Chapter 12 - WavesDocumento18 páginasPhysics Notes Chapter 12 - WavesMohammed RaghibAinda não há avaliações
- Shopping Malls Security and Power Management System Using Ir1 - 2Documento57 páginasShopping Malls Security and Power Management System Using Ir1 - 2Srivani Pulakala100% (6)
- Image Compression Using DCT Implementing MatlabDocumento23 páginasImage Compression Using DCT Implementing MatlabHarish Kumar91% (11)
- 06100084EN3 - ZET-Horn 131-141 - SCREENDocumento2 páginas06100084EN3 - ZET-Horn 131-141 - SCREENenquiryAinda não há avaliações
- Symetro G/box ComponenetDocumento29 páginasSymetro G/box ComponenetmanishAinda não há avaliações
- Photoelectric EffectDocumento8 páginasPhotoelectric EffectAshAinda não há avaliações
- Cubic Accelerometers Types 4500 and 4501 Product DataDocumento2 páginasCubic Accelerometers Types 4500 and 4501 Product Datajhon vargasAinda não há avaliações
- Sampling Frequency and Eye-Tracking MeasuresDocumento12 páginasSampling Frequency and Eye-Tracking MeasuresCarlos TresemeAinda não há avaliações
- 13.1-Charactics of Light: Physics Revision Worksheet Name: ..Grade: 11 Section: . DateDocumento6 páginas13.1-Charactics of Light: Physics Revision Worksheet Name: ..Grade: 11 Section: . DatefgdhAinda não há avaliações
- Sound Level Meter: Model: SL-4022Documento2 páginasSound Level Meter: Model: SL-4022megacobAinda não há avaliações
- 1.1 WaveDocumento87 páginas1.1 WavePeggy Esther YongAinda não há avaliações
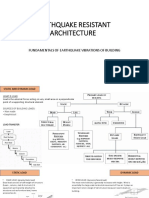
- Earthquake Resistant Architecture: Fundamentals of Earthquake Vibrations of BuildingDocumento6 páginasEarthquake Resistant Architecture: Fundamentals of Earthquake Vibrations of BuildingAr Shubham JaiswalAinda não há avaliações
- Quantifying facies variation through seismic impedance inversionDocumento2 páginasQuantifying facies variation through seismic impedance inversionabuobidaAinda não há avaliações
- UltrasoundDocumento26 páginasUltrasoundvignesh_march19940% (1)
- Sfa 1610-JbeDocumento6 páginasSfa 1610-JbeHung NguyentheAinda não há avaliações
- 39th Aerospace Mechanisms Symposium: NASA/CP-2008-215252Documento442 páginas39th Aerospace Mechanisms Symposium: NASA/CP-2008-215252Serkan ZeytinAinda não há avaliações
- Doppler Effect: V Speed of Wave VDocumento10 páginasDoppler Effect: V Speed of Wave Vjoe0% (1)