Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Semantic Red Effect: Processing The Word Red Undermines Intellectual PerformanceDocumento12 páginasThe Semantic Red Effect: Processing The Word Red Undermines Intellectual PerformanceWwwanand111Ainda não há avaliações
- L4 Making GeneralizationsDocumento17 páginasL4 Making GeneralizationsJonalyn MempinAinda não há avaliações
- Maths III Transform & Disrete PDFDocumento3 páginasMaths III Transform & Disrete PDFDeepak sharmaAinda não há avaliações
- Handbook of Taiwanese RomanizationDocumento221 páginasHandbook of Taiwanese RomanizationAhmd AlfAinda não há avaliações
- Lesson 23 Exercises Henle FYLDocumento10 páginasLesson 23 Exercises Henle FYLJennifer Jones100% (1)
- Body Image and The Media EssaysDocumento6 páginasBody Image and The Media EssayskbmbwubafAinda não há avaliações
- Writing in The Discipline LectureDocumento31 páginasWriting in The Discipline LectureMhel Demabogte100% (4)
- Rock Art in The Swat ValleyDocumento13 páginasRock Art in The Swat ValleySabyasachi ChatterjeeAinda não há avaliações
- hw6 SolDocumento11 páginashw6 SolAbdallah RedaAinda não há avaliações
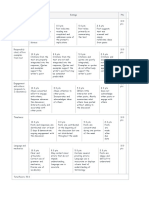
- Discussion RubricDocumento1 páginaDiscussion Rubricapi-441121250Ainda não há avaliações
- QuotationDocumento12 páginasQuotationRaghav RamamurthyAinda não há avaliações
- Quora Question PairsDocumento7 páginasQuora Question PairsMuhammed AbdalshakourAinda não há avaliações
- PCAN-USB-FD UserMan EngDocumento33 páginasPCAN-USB-FD UserMan EngAndrey AbramchukAinda não há avaliações
- SDLC Assignment 1 BKC18400Documento24 páginasSDLC Assignment 1 BKC18400HinHin67% (3)
- Airline Management System.Documento5 páginasAirline Management System.Menna HeshamAinda não há avaliações
- Cahier 00Documento6 páginasCahier 00aggy12Ainda não há avaliações
- Active HDL Simulation TutorialDocumento6 páginasActive HDL Simulation Tutorialtapas_bayen9388Ainda não há avaliações
- Orca Share Media1557566907716Documento60 páginasOrca Share Media1557566907716Noreenzel joy Villanueva100% (1)
- LAB: String Patterns, Sorting & Grouping: HR DatabaseDocumento16 páginasLAB: String Patterns, Sorting & Grouping: HR DatabaseJeampierr JIMENEZ MARQUEZAinda não há avaliações
- Practical Programming 2017Documento277 páginasPractical Programming 2017Kailash SharmaAinda não há avaliações
- Lecture12 UpdatedDocumento21 páginasLecture12 UpdatedHamed TirandazAinda não há avaliações
- Single Way and Multiway Selection-Relational and Logical OperatorsDocumento10 páginasSingle Way and Multiway Selection-Relational and Logical OperatorsSreedhanya MvAinda não há avaliações
- JJ Purim Dvar TorahDocumento2 páginasJJ Purim Dvar TorahArvin LevineAinda não há avaliações
- Zoom #13: Commerce Unethical Fashion Passive Voice: Past, Present, Future - QuestionsDocumento13 páginasZoom #13: Commerce Unethical Fashion Passive Voice: Past, Present, Future - QuestionsRosario LópezAinda não há avaliações
- PolaDocumento66 páginasPolaPandu Luhur PambudiAinda não há avaliações
- Vocabulary Acquisition Paul Nation 1989Documento139 páginasVocabulary Acquisition Paul Nation 1989juanhernandezloaizaAinda não há avaliações
- Housing in TurkeyDocumento8 páginasHousing in TurkeyEda AcaraAinda não há avaliações
- TCS SD ConfigurationsDocumento12 páginasTCS SD Configurationssekhar dattaAinda não há avaliações
- Rohit Dvclub 130422125508 Phpapp02Documento20 páginasRohit Dvclub 130422125508 Phpapp02Sam HoneyAinda não há avaliações
- DLL - English 4 - Q2 - W2Documento6 páginasDLL - English 4 - Q2 - W2Kharene Nimer GlaseAinda não há avaliações