Você também pode gostar
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesAinda não há avaliações
- Inertia - Grid Inertia and Frequency Control in Power Systems With High Penetration of RenewablesDocumento6 páginasInertia - Grid Inertia and Frequency Control in Power Systems With High Penetration of Renewablessatyajitebay3Ainda não há avaliações
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingNo EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingNota: 4.5 de 5 estrelas4.5/5 (2)
- Primary Frequency Control by Wind Turbines: I. Erlich, Senior Member, IEEE and M. Wilch, Student Member, IEEEDocumento8 páginasPrimary Frequency Control by Wind Turbines: I. Erlich, Senior Member, IEEE and M. Wilch, Student Member, IEEEМилан ЛукићAinda não há avaliações
- Resposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDocumento8 páginasResposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDaniel reisAinda não há avaliações
- Impacts of Wind FarmsDocumento20 páginasImpacts of Wind FarmsKVVAinda não há avaliações
- Review On Frequency Control of Power Systems With Wind Power Penetration51Documento8 páginasReview On Frequency Control of Power Systems With Wind Power Penetration51Mohamed BerririAinda não há avaliações
- Energies 11 02249 v3 PDFDocumento33 páginasEnergies 11 02249 v3 PDFSubhadeep PaladhiAinda não há avaliações
- An Assessment of The Impact of Wind Generation On Frequency ControlDocumento9 páginasAn Assessment of The Impact of Wind Generation On Frequency ControlNadil AminAinda não há avaliações
- Transient Stability Improvement of SMIB With Unified Power Flow ControllerDocumento78 páginasTransient Stability Improvement of SMIB With Unified Power Flow ControllerRagesh OdungattuAinda não há avaliações
- Control Strategies of Frequency Regulation in Wind Based Power System: A ReviewDocumento6 páginasControl Strategies of Frequency Regulation in Wind Based Power System: A ReviewEditor IJTSRDAinda não há avaliações
- Applied Sciences: Impacts of Integration of Wind Farms On Power System Transient StabilityDocumento16 páginasApplied Sciences: Impacts of Integration of Wind Farms On Power System Transient Stabilityaslan akbeyAinda não há avaliações
- Applied Sciences: Virtual Inertia: Current Trends and Future DirectionsDocumento29 páginasApplied Sciences: Virtual Inertia: Current Trends and Future DirectionsEJAZ AHMADAinda não há avaliações
- SSR Damping Using GCSC and TCSC in Wind FarmsDocumento10 páginasSSR Damping Using GCSC and TCSC in Wind FarmsIJIRAE- International Journal of Innovative Research in Advanced EngineeringAinda não há avaliações
- 309 Sumper PDFDocumento5 páginas309 Sumper PDFAnonymus_01Ainda não há avaliações
- Grid Code Requirements For Wind Power Integration 1grid Code Requirements For Wind Power IntegrationDocumento10 páginasGrid Code Requirements For Wind Power Integration 1grid Code Requirements For Wind Power IntegrationDhanaji WakadeAinda não há avaliações
- 769 775 Vahidi - Tavakoli - SI - PaperDocumento7 páginas769 775 Vahidi - Tavakoli - SI - PaperMohamed AlAinda não há avaliações
- Impact of Large Offshore Wind Farms On Power System Transient StabilityDocumento8 páginasImpact of Large Offshore Wind Farms On Power System Transient StabilityMadhusudhan SrinivasanAinda não há avaliações
- Application of STATCOM To Increase Transient Stability of Wind FarmDocumento7 páginasApplication of STATCOM To Increase Transient Stability of Wind FarmsirageldeenAinda não há avaliações
- Impact of Wind Farm On Power Quality Regarding To FACTS DevicesDocumento6 páginasImpact of Wind Farm On Power Quality Regarding To FACTS Devicesmekmoh2010Ainda não há avaliações
- Virtual Inertia Adaptive Control of A Doubly Fed IDocumento16 páginasVirtual Inertia Adaptive Control of A Doubly Fed IMekonnen ShewaregaAinda não há avaliações
- Operation and Control of Wind Farms in Non-Interconnected Power SystemsDocumento38 páginasOperation and Control of Wind Farms in Non-Interconnected Power SystemsYanis MargarisAinda não há avaliações
- Soft Starter Investigation On Grid Connection of Wind TurbinesDocumento8 páginasSoft Starter Investigation On Grid Connection of Wind TurbinesPradip KhatriAinda não há avaliações
- IJETR021123Documento5 páginasIJETR021123Binda MridulabalakrishnanAinda não há avaliações
- CP 2011 0188Documento6 páginasCP 2011 0188ALI BOUKHRISSAinda não há avaliações
- Optimization of Power Factor and Energy Management in Wind Energy StationDocumento8 páginasOptimization of Power Factor and Energy Management in Wind Energy StationNishant AnandAinda não há avaliações
- State-Of-The-Art Review On Frequency Response of Wind Power Plants in Power SystemsDocumento16 páginasState-Of-The-Art Review On Frequency Response of Wind Power Plants in Power SystemsNedim HadžiaganovićAinda não há avaliações
- 10 Chapter 1Documento14 páginas10 Chapter 1Iulian TraiciuAinda não há avaliações
- Statcom & DBRDocumento18 páginasStatcom & DBRAlok Bikash SadangiAinda não há avaliações
- DynamicDemand As On IEEE Site 1Documento9 páginasDynamicDemand As On IEEE Site 1AlejandroHerreraGurideChileAinda não há avaliações
- Grid Integration of Wind EnergyDocumento5 páginasGrid Integration of Wind EnergybdkAinda não há avaliações
- AGC of A Hydrothermal System With Thyristor Controlled Phase Shifter in The Tie-LineDocumento7 páginasAGC of A Hydrothermal System With Thyristor Controlled Phase Shifter in The Tie-LineRajeshJosephAbrahamEdasseriathuAinda não há avaliações
- Continuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDocumento17 páginasContinuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDork654651Ainda não há avaliações
- Generic Inertia Emulation Controller For Multiterminal VSC High Voltage Direct CurrentDocumento9 páginasGeneric Inertia Emulation Controller For Multiterminal VSC High Voltage Direct CurrentPedro SCAinda não há avaliações
- Modeling and Simulation of The AnticipatDocumento17 páginasModeling and Simulation of The Anticipatanibal espinozaAinda não há avaliações
- Frequency Control of Future Power Systems To New Control MethodsDocumento2 páginasFrequency Control of Future Power Systems To New Control Methodsmuhammad irfanAinda não há avaliações
- Frequency Control of Future Power Systems To New Control MethodsDocumento2 páginasFrequency Control of Future Power Systems To New Control Methodsmuhammad irfanAinda não há avaliações
- Fast-Frequency Response Provided by DFIG-Wind Turbines and Its Impact On The GridDocumento10 páginasFast-Frequency Response Provided by DFIG-Wind Turbines and Its Impact On The GridmianAinda não há avaliações
- 154 904 2 PBDocumento47 páginas154 904 2 PBjagarov4954100% (1)
- 09 Frequency StabDocumento64 páginas09 Frequency StabsulemankhalidAinda não há avaliações
- Frequency Response From Wind TurbinesDocumento16 páginasFrequency Response From Wind TurbineszahidAinda não há avaliações
- 2nd Reference PaperDocumento4 páginas2nd Reference PaperTeja BhogadiAinda não há avaliações
- Active Power Control Strategies of DFIG Wind TurbinesDocumento6 páginasActive Power Control Strategies of DFIG Wind TurbinesMona ValikhaniAinda não há avaliações
- SmoothSmoothing of Wind Farm Output Using Short-Term Ahead Wind Speed Prediction and Flywheel Energy Storage SystemDocumento22 páginasSmoothSmoothing of Wind Farm Output Using Short-Term Ahead Wind Speed Prediction and Flywheel Energy Storage SystemAnand Parakkat ParambilAinda não há avaliações
- A1 - Full Papers PS1 10834 2022Documento18 páginasA1 - Full Papers PS1 10834 2022DmitryAinda não há avaliações
- A304SE PPT Slides T111 - FinalDocumento194 páginasA304SE PPT Slides T111 - FinalEranga Nandana Kumara KudahewaAinda não há avaliações
- Sree Devi 2016Documento5 páginasSree Devi 2016João PedroAinda não há avaliações
- Long-Term Frequency Stability Assessment Based On Extended Frequency Response ModelDocumento12 páginasLong-Term Frequency Stability Assessment Based On Extended Frequency Response ModeltusharshharmaAinda não há avaliações
- Jadav SynopsisDocumento4 páginasJadav SynopsishtjadhavAinda não há avaliações
- Impacts of Wind Farms On Power System StabilityDocumento20 páginasImpacts of Wind Farms On Power System StabilityVinga VingAinda não há avaliações
- Overview of Problems in Wind Power IntegrationDocumento4 páginasOverview of Problems in Wind Power Integrationsriramv93Ainda não há avaliações
- Dynamic Frequency Support With DFIG WindDocumento7 páginasDynamic Frequency Support With DFIG WindHải Đăng LêAinda não há avaliações
- Design and Implementation of A Robust Current Controller For VSI Connected To The Grid Through An LCL FilterDocumento9 páginasDesign and Implementation of A Robust Current Controller For VSI Connected To The Grid Through An LCL Filtersandeepbabu28Ainda não há avaliações
- Impact of Wind Power Generators On The Frequency Stability of Synchronous GeneratorsDocumento9 páginasImpact of Wind Power Generators On The Frequency Stability of Synchronous GeneratorsR0B0T2013Ainda não há avaliações
- Eff'Ects of Small Embedded Generation On Power QualityDocumento4 páginasEff'Ects of Small Embedded Generation On Power QualitychethanAinda não há avaliações
- 09 Frequency StabDocumento49 páginas09 Frequency StabirfanWPKAinda não há avaliações
- Small Wind Turbine ControllersDocumento25 páginasSmall Wind Turbine Controllersgabrielitos7891Ainda não há avaliações
- PQ Improvement of Grid Connected WECS Using FACTS Devices 1Documento20 páginasPQ Improvement of Grid Connected WECS Using FACTS Devices 1zabiruddin786Ainda não há avaliações
- Kondur2 CH16&17Documento104 páginasKondur2 CH16&17cssc8626Ainda não há avaliações
- Rohit Bebarta CVDocumento1 páginaRohit Bebarta CVRohit BebartaAinda não há avaliações
- Quantum Multiport PackerDocumento1 páginaQuantum Multiport Packersmithyry2014Ainda não há avaliações
- Steam Its Generation and Use 41st Edition PDFDocumento1.106 páginasSteam Its Generation and Use 41st Edition PDFAlberto Valdivia91% (11)
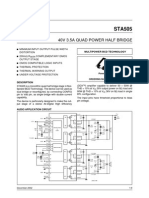
- STA505Documento10 páginasSTA505kizonzAinda não há avaliações
- Broadcast BillDocumento22 páginasBroadcast BillLidwin SoundariaAinda não há avaliações
- Ground ImprovementDocumento17 páginasGround Improvementpatelahmad77Ainda não há avaliações
- Syed Ansar Ahmed: Quantity EngineerDocumento7 páginasSyed Ansar Ahmed: Quantity EngineerRavi YadavAinda não há avaliações
- Report Torsion TestDocumento27 páginasReport Torsion TestCherif ChokeirAinda não há avaliações
- Black Box Software Testing: Introduction To Test DocumentationDocumento29 páginasBlack Box Software Testing: Introduction To Test DocumentationMohamed SaleemAinda não há avaliações
- Guide To Single Point Moorings Old PDFDocumento456 páginasGuide To Single Point Moorings Old PDFsarifin100% (1)
- Class 10 Science (Physics) MCQs Chapter 11 QuestionsDocumento28 páginasClass 10 Science (Physics) MCQs Chapter 11 QuestionsKSA TEXTILEAinda não há avaliações
- CraftDocumento15 páginasCraftImamMukhri100% (1)
- Std-Insp-0002 (Incoming Material Inspection Procedure)Documento3 páginasStd-Insp-0002 (Incoming Material Inspection Procedure)airbroomAinda não há avaliações
- The Wire and Cable Technical Information HandbookDocumento313 páginasThe Wire and Cable Technical Information Handbookdannyalarconm64718100% (5)
- Et200sp Ai 4xrtd TC 2 3 4 Wire HF Manual en-US en-US PDFDocumento80 páginasEt200sp Ai 4xrtd TC 2 3 4 Wire HF Manual en-US en-US PDFSrikar TanukulaAinda não há avaliações
- 1Documento9 páginas1MurtadhaAinda não há avaliações
- Product Data: Convertible Air Handlers 1-1/2 - 5 TonDocumento28 páginasProduct Data: Convertible Air Handlers 1-1/2 - 5 TonJonathan CapraAinda não há avaliações
- 99929Documento20 páginas99929Tamer Moustafa100% (2)
- DefluoridationDocumento13 páginasDefluoridationSuha Yechwad100% (1)
- Evermotion 44 PDFDocumento2 páginasEvermotion 44 PDFAmitAinda não há avaliações
- Hardness of Die's Components (PSMC) (Recovered)Documento4 páginasHardness of Die's Components (PSMC) (Recovered)Subuk T. RathodAinda não há avaliações
- FIDIC Red Book Construction Contract 1st Edition 1 9Documento9 páginasFIDIC Red Book Construction Contract 1st Edition 1 9raviAinda não há avaliações
- SchedulingDocumento41 páginasSchedulingBeing VikramAinda não há avaliações
- C Basic ExercisesDocumento7 páginasC Basic ExercisesAngelo MartinAinda não há avaliações
- Submodeling Technique in Stress AnalysisDocumento16 páginasSubmodeling Technique in Stress AnalysisffontanaAinda não há avaliações
- Lorad M-III Mammography System Service Manual 9-500A-0029Documento178 páginasLorad M-III Mammography System Service Manual 9-500A-0029Tulio Moreira100% (4)
- Dowex Monosphere 650C (H)Documento2 páginasDowex Monosphere 650C (H)agnarindra01_8550147Ainda não há avaliações
- Emi 2018Documento72 páginasEmi 2018Pushpendra Pratap Singh0% (1)
- PM 2.5 Sampler Model Aas-127: Advantages: FeaturesDocumento1 páginaPM 2.5 Sampler Model Aas-127: Advantages: FeaturesRajesh MishraAinda não há avaliações
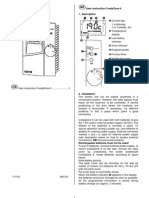
- Credazone 6 GiudeDocumento3 páginasCredazone 6 Giudeguddu84Ainda não há avaliações
- To Engineer Is Human: The Role of Failure in Successful DesignNo EverandTo Engineer Is Human: The Role of Failure in Successful DesignNota: 4 de 5 estrelas4/5 (138)
- Crossings: How Road Ecology Is Shaping the Future of Our PlanetNo EverandCrossings: How Road Ecology Is Shaping the Future of Our PlanetNota: 4.5 de 5 estrelas4.5/5 (10)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansAinda não há avaliações
- Composite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsNo EverandComposite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsAinda não há avaliações
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNota: 4.5 de 5 estrelas4.5/5 (21)
- The Great Bridge: The Epic Story of the Building of the Brooklyn BridgeNo EverandThe Great Bridge: The Epic Story of the Building of the Brooklyn BridgeNota: 4.5 de 5 estrelas4.5/5 (59)
- The Finite Element Method: Linear Static and Dynamic Finite Element AnalysisNo EverandThe Finite Element Method: Linear Static and Dynamic Finite Element AnalysisNota: 5 de 5 estrelas5/5 (3)
- Structural Cross Sections: Analysis and DesignNo EverandStructural Cross Sections: Analysis and DesignNota: 4.5 de 5 estrelas4.5/5 (19)
- Construction Innovation and Process ImprovementNo EverandConstruction Innovation and Process ImprovementAkintola AkintoyeAinda não há avaliações
- Pile Design and Construction Rules of ThumbNo EverandPile Design and Construction Rules of ThumbNota: 4.5 de 5 estrelas4.5/5 (15)
- Rocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyNo EverandRocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyNota: 4.5 de 5 estrelas4.5/5 (5)
- Finite Element Analysis and Design of Steel and Steel–Concrete Composite BridgesNo EverandFinite Element Analysis and Design of Steel and Steel–Concrete Composite BridgesAinda não há avaliações
- Up and Running with AutoCAD 2020: 2D Drafting and DesignNo EverandUp and Running with AutoCAD 2020: 2D Drafting and DesignAinda não há avaliações
- CAREC Road Safety Engineering Manual 3: Roadside Hazard ManagementNo EverandCAREC Road Safety Engineering Manual 3: Roadside Hazard ManagementAinda não há avaliações
- Compendium of Best Practices in Road Asset ManagementNo EverandCompendium of Best Practices in Road Asset ManagementAinda não há avaliações
- Engineering Rock Mass Classification: Tunnelling, Foundations and LandslidesNo EverandEngineering Rock Mass Classification: Tunnelling, Foundations and LandslidesNota: 4 de 5 estrelas4/5 (5)