Você também pode gostar
- ProjectionsDocumento9 páginasProjectionsstrrrweAinda não há avaliações
- A 299 - A 299M - 09 (2014) PDFDocumento2 páginasA 299 - A 299M - 09 (2014) PDFأسامة وحيد الدين رمضانAinda não há avaliações
- 50MN7Documento2 páginas50MN7Anonymous pmp0NyDAinda não há avaliações
- Pressure Vessel Plates, Alloy Steel, Quenched and Tempered 7, 8, and 9 % NickelDocumento4 páginasPressure Vessel Plates, Alloy Steel, Quenched and Tempered 7, 8, and 9 % Nickelalucard375100% (1)
- A490MDocumento5 páginasA490MKAROLAinda não há avaliações
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotDocumento5 páginasAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotPravallika YadavAinda não há avaliações
- 01) Linux - Lab ManualDocumento89 páginas01) Linux - Lab ManualmaunghtaikAinda não há avaliações
- Evraz CatalogDocumento52 páginasEvraz CatalogAhmad KhalifaAinda não há avaliações
- Process PlantDocumento133 páginasProcess PlantVijayabaraniAinda não há avaliações
- British Steel Sections DatasheetsDocumento18 páginasBritish Steel Sections DatasheetsAdnan NajemAinda não há avaliações
- Prediction of Solidification TimeDocumento9 páginasPrediction of Solidification TimeRaghu BhatAinda não há avaliações
- British Steel Sections DatasheetsDocumento18 páginasBritish Steel Sections DatasheetsRatnesh ShuklaAinda não há avaliações
- RAL Color ChartDocumento1 páginaRAL Color ChartPero Plemeniti SimicAinda não há avaliações
- Gating SystemDocumento24 páginasGating SystemTri Yudha SetiawanAinda não há avaliações
- Architecture Design Handbook - Flashings and Copings - Coping CoversDocumento5 páginasArchitecture Design Handbook - Flashings and Copings - Coping CoversDukeAinda não há avaliações
- Quality Manual: Title: Document Number: QCC1479 Revision: 66 Page 1 of 46Documento46 páginasQuality Manual: Title: Document Number: QCC1479 Revision: 66 Page 1 of 46avinash_k007Ainda não há avaliações
- Knife Gate Valve - AVKCMSDocumento2 páginasKnife Gate Valve - AVKCMSjuantamad02Ainda não há avaliações
- Dimensional Engineering: Based On The ASME Y14.5M-1994 Dimensioning and Tolerancing StandardDocumento77 páginasDimensional Engineering: Based On The ASME Y14.5M-1994 Dimensioning and Tolerancing StandardPankaj PatilAinda não há avaliações
- LAPRIL-K017 - SS Piping PDFDocumento76 páginasLAPRIL-K017 - SS Piping PDFNathan LeoAinda não há avaliações
- Case Study: 3D TransformationDocumento22 páginasCase Study: 3D TransformationVyom BhardwajAinda não há avaliações
- Everything You Need To Know About Flatteners and Levelers For Coil Processing - Part IVDocumento7 páginasEverything You Need To Know About Flatteners and Levelers For Coil Processing - Part IVertuokumusAinda não há avaliações
- Guidelines For The Conduct of AISSEE - 2021: Date of Exam: 07 February 2021Documento101 páginasGuidelines For The Conduct of AISSEE - 2021: Date of Exam: 07 February 2021DrAjay SinghAinda não há avaliações
- Section 11 Piping Systems, Valves and Pumps: I - Part 1 GL 2012 Page 11-1Documento52 páginasSection 11 Piping Systems, Valves and Pumps: I - Part 1 GL 2012 Page 11-1Andy PhoenixAinda não há avaliações
- Nickel Rod and Bar: Standard Specification ForDocumento6 páginasNickel Rod and Bar: Standard Specification ForSrinivasan KrishnamoorthyAinda não há avaliações
- 1.10. Grades: Process Piping Fundamentals, Codes and Standards - Module 1Documento5 páginas1.10. Grades: Process Piping Fundamentals, Codes and Standards - Module 1Raakze MoviAinda não há avaliações
- Air Flow Analysis For Defroster and Ventilation System of A Passanger CarDocumento4 páginasAir Flow Analysis For Defroster and Ventilation System of A Passanger CarSai PatilAinda não há avaliações
- An Introduction To Extreme Value Theory: Petra FriederichsDocumento25 páginasAn Introduction To Extreme Value Theory: Petra Friederichssarkawt muhammadAinda não há avaliações
- COSMOS FloWorks TutorialDocumento238 páginasCOSMOS FloWorks Tutorialblacklili123Ainda não há avaliações
- Interpenetration and Development BookletDocumento49 páginasInterpenetration and Development BookletEzekiel OkalAinda não há avaliações
- Astm A671 GR Cc60Documento4 páginasAstm A671 GR Cc60RELIABLE PIPES & TUBESAinda não há avaliações
- Release NotesDocumento118 páginasRelease NotesFrancisco José FernándezAinda não há avaliações
- ISO 3834-1-2021 Criteria For Selecting Quality LevelDocumento10 páginasISO 3834-1-2021 Criteria For Selecting Quality LevelPushkar GopalAinda não há avaliações
- Casting Process Design GuidelinesDocumento8 páginasCasting Process Design GuidelinestejassidhpuraAinda não há avaliações
- Caesar Ii: Training SyllabusDocumento1 páginaCaesar Ii: Training SyllabusJason ChongAinda não há avaliações
- NipoflangeDocumento13 páginasNipoflangeAchraf BoudayaAinda não há avaliações
- Api600 Valve Trim ChartDocumento2 páginasApi600 Valve Trim ChartBoankAinda não há avaliações
- 2140 SJ-210 PDFDocumento12 páginas2140 SJ-210 PDFhuychungngAinda não há avaliações
- The Indications Are Basically Founded On Our Actual Know-How. This Technical Data Sheet Is Without Commitment and Not ContractedDocumento1 páginaThe Indications Are Basically Founded On Our Actual Know-How. This Technical Data Sheet Is Without Commitment and Not Contractedlijojose1Ainda não há avaliações
- Working Drawing and Welding SymbolsDocumento21 páginasWorking Drawing and Welding SymbolssarathAinda não há avaliações
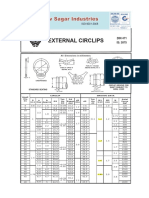
- External CirclipDocumento2 páginasExternal CirclipDivyang MistryAinda não há avaliações
- CADM Unit Geometric Modeling - SurfacesDocumento31 páginasCADM Unit Geometric Modeling - SurfacesWilsonAinda não há avaliações
- Model Paper Sainik School Class 6Documento2 páginasModel Paper Sainik School Class 6AbcAinda não há avaliações
- Chor InovDocumento7 páginasChor Inovmanoj ranathiive100% (1)
- Elevated Water TankDocumento16 páginasElevated Water TankRANJITH PULIKESHIAinda não há avaliações
- Brinell Scale HBW 10/3000 ChartDocumento1 páginaBrinell Scale HBW 10/3000 ChartMark BrailsfordAinda não há avaliações
- Kitz Carbon and Stainless Steel Floating Ball ValvesDocumento160 páginasKitz Carbon and Stainless Steel Floating Ball ValvesAnonymous 1880JHcGAinda não há avaliações
- Copper Pipe SupportDocumento2 páginasCopper Pipe SupportAmirudin SallehAinda não há avaliações
- Is 778 1984 Gate, Globe and Check Valves For Water Works Purposes (Fourth RevisionDocumento32 páginasIs 778 1984 Gate, Globe and Check Valves For Water Works Purposes (Fourth Revisionyesvvn100% (1)
- Inventor 2014 APIDocumento17 páginasInventor 2014 APIbcoburn3Ainda não há avaliações
- Various Types of Surfaces: Made By:-Nilesh Bhojani Guided By: - Prof. B.K. PatelDocumento15 páginasVarious Types of Surfaces: Made By:-Nilesh Bhojani Guided By: - Prof. B.K. Patelnilesh bhojaniAinda não há avaliações
- ISO 630-Fe430-CDocumento1 páginaISO 630-Fe430-CS.Hasan MirasadiAinda não há avaliações
- WEG Roller Table 50040456 Brochure EnglishDocumento12 páginasWEG Roller Table 50040456 Brochure EnglishjmartinezmoAinda não há avaliações
- Aluminium - The Age of of ShipsDocumento36 páginasAluminium - The Age of of Shipsnapoleonpt2Ainda não há avaliações
- SIGA CT1 Est Manual Instalacion SH IngenieriaDocumento3 páginasSIGA CT1 Est Manual Instalacion SH IngenieriaedgarAinda não há avaliações
- BS EN 10028 3 2009, Flat ProductsDocumento20 páginasBS EN 10028 3 2009, Flat ProductsgopalvivekAinda não há avaliações
- JIS B2311 Steel Butt Welding Pipe Fittings For Ordinary UseDocumento24 páginasJIS B2311 Steel Butt Welding Pipe Fittings For Ordinary Usense mcxAinda não há avaliações
- Errata ASME B18.29.1-1993: 1995 345 East 47th Street, 10017Documento39 páginasErrata ASME B18.29.1-1993: 1995 345 East 47th Street, 10017MaxJahnkeAinda não há avaliações
- Introduction To Open GL: by Rama Satish KV Visiting Professor, WASEDocumento38 páginasIntroduction To Open GL: by Rama Satish KV Visiting Professor, WASEsatishkvrAinda não há avaliações
- 3D Drawing in Visual Basic PDFDocumento14 páginas3D Drawing in Visual Basic PDFAlessandro PalliniAinda não há avaliações
- 3 Model Science Xi 1Documento12 páginas3 Model Science Xi 1Rikesh AdhikariAinda não há avaliações
- 2016 AJC H2 JC2 Prelim Paper 1 (Questions)Documento5 páginas2016 AJC H2 JC2 Prelim Paper 1 (Questions)VarshLokAinda não há avaliações
- Final Test Semester 1: Academic Year 2021-2022 Sinar Cendekia Islamic Elementary School 5383119Documento3 páginasFinal Test Semester 1: Academic Year 2021-2022 Sinar Cendekia Islamic Elementary School 5383119Dian NurmalaAinda não há avaliações
- CAP Book 11 - 12Documento41 páginasCAP Book 11 - 12cookjb1Ainda não há avaliações
- 2016 Croatia Team Selection Test: Contributors: Gavrilos, DanepaleDocumento2 páginas2016 Croatia Team Selection Test: Contributors: Gavrilos, DanepaleJhefferson LopezAinda não há avaliações
- Shape FunctionDocumento2 páginasShape Functionsai100% (1)
- Crystal Lattice - Crystal SystemDocumento5 páginasCrystal Lattice - Crystal SystemabhishekAinda não há avaliações
- Unit 1Documento7 páginasUnit 1pankaj12345katreAinda não há avaliações
- Methods of Integration: Substitution MethodDocumento42 páginasMethods of Integration: Substitution MethodMajak MarialAinda não há avaliações
- Classical Fields 2Documento2 páginasClassical Fields 2Jonathan SanchezAinda não há avaliações
- CLASS-10 (X) Mathematics Case Study Based Questions: (Based On New Question Paper Pattern)Documento32 páginasCLASS-10 (X) Mathematics Case Study Based Questions: (Based On New Question Paper Pattern)Hima ShettyAinda não há avaliações
- Sample Problem Plane Analytic GeometryDocumento1 páginaSample Problem Plane Analytic GeometryMJ Dela CruzAinda não há avaliações
- CBSE Maths Paper 2 (QP)Documento6 páginasCBSE Maths Paper 2 (QP)Acharya Dronacharya Foundation CenterAinda não há avaliações
- Mathematics Standard Marking Scheme and Answer Key PDFDocumento8 páginasMathematics Standard Marking Scheme and Answer Key PDFAbhishek PatawariAinda não há avaliações
- Math Reviewer St. LouisDocumento8 páginasMath Reviewer St. LouisLyle Silagan Pevida0% (1)
- MOTION IN ONE DIMENSION (Kinematics)Documento61 páginasMOTION IN ONE DIMENSION (Kinematics)Mel RS100% (1)
- Week003 CourseModuleDocumento17 páginasWeek003 CourseModuleMalik MalikAinda não há avaliações
- Advances in Quantum MechanicsDocumento755 páginasAdvances in Quantum MechanicsBrosoa LoquaAinda não há avaliações
- 1.easa Part 66 Mod.1 1Documento80 páginas1.easa Part 66 Mod.1 1Tharrmaselan manimaranAinda não há avaliações
- G & M-Code Cheat SheetDocumento3 páginasG & M-Code Cheat SheetORGONERAinda não há avaliações
- GCSE Trigonometry Revision Cards: SohcahtoaDocumento5 páginasGCSE Trigonometry Revision Cards: SohcahtoaboostoberoiAinda não há avaliações
- Basics of GeometryDocumento27 páginasBasics of Geometrycharan100% (1)
- Zarko Bizaca - An Explicit Family of Exotic Casson HandlesDocumento6 páginasZarko Bizaca - An Explicit Family of Exotic Casson HandlesDuncan_VimAinda não há avaliações
- Module 1: Atomic Structure Lecture 3: Angular Momentum: ObjectivesDocumento8 páginasModule 1: Atomic Structure Lecture 3: Angular Momentum: ObjectivesVedAinda não há avaliações
- Vsepr WorksheetDocumento2 páginasVsepr WorksheetAminah AbdullahAinda não há avaliações
- Sec 1 Math North Vista Sec SA2 2018iDocumento33 páginasSec 1 Math North Vista Sec SA2 2018iR LeeAinda não há avaliações
- School - Data - ADIS1 - Assignment - 20511 - Grade 10 Revision Worksheet 1 Term 1 - NewDocumento4 páginasSchool - Data - ADIS1 - Assignment - 20511 - Grade 10 Revision Worksheet 1 Term 1 - Newsharon VijuAinda não há avaliações
- Volume of CylinderDocumento17 páginasVolume of CylinderYdoeht PanganibanAinda não há avaliações
- X F (X) V1+ Cos: 1+ Then C) - 2Documento21 páginasX F (X) V1+ Cos: 1+ Then C) - 2sourav tapadarAinda não há avaliações