Você também pode gostar
- SE 302 Linear Systems Course OverviewDocumento37 páginasSE 302 Linear Systems Course OverviewAHMEDAinda não há avaliações
- Files-1. Introduction To Control Systems SE302 Topic 1 - Introduction To Linear Systems PDFDocumento37 páginasFiles-1. Introduction To Control Systems SE302 Topic 1 - Introduction To Linear Systems PDFAHMEDAinda não há avaliações
- Lecture 1 ADocumento294 páginasLecture 1 AZakariya Mohamed100% (1)
- Introduction To Control SystemsDocumento38 páginasIntroduction To Control Systemsearnest normanAinda não há avaliações
- Embedded Systems and Control Systems': An Open-Loop ControllerDocumento5 páginasEmbedded Systems and Control Systems': An Open-Loop Controllermohed_kamalAinda não há avaliações
- Process Control FundamentalsDocumento294 páginasProcess Control FundamentalsSana KhanAinda não há avaliações
- Control Systems Modeling and DesignDocumento37 páginasControl Systems Modeling and DesignshrnbolonneAinda não há avaliações
- Control System RequirementsAn ideal control system would:- Be stable- Provide absolute accuracy (maintain zero error) - Respond instantaneouslyDocumento32 páginasControl System RequirementsAn ideal control system would:- Be stable- Provide absolute accuracy (maintain zero error) - Respond instantaneouslySudipta PaulAinda não há avaliações
- Class 2 Classification of Control Systems With ExemplesDocumento31 páginasClass 2 Classification of Control Systems With ExemplesAcharya Mascara PlaudoAinda não há avaliações
- EE402 RecitationDocumento64 páginasEE402 Recitationvignesh0617Ainda não há avaliações
- Industrial Electronics Class Review on Process Control SystemsDocumento3 páginasIndustrial Electronics Class Review on Process Control SystemsHammad AnsariAinda não há avaliações
- Introduction To Control SystemDocumento32 páginasIntroduction To Control SystemSaurabh Chandra MishraAinda não há avaliações
- Electronic Instrumentation & Control SystemsDocumento76 páginasElectronic Instrumentation & Control SystemsshahnawazuddinAinda não há avaliações
- Basic Concepts of Control SystemDocumento20 páginasBasic Concepts of Control SystemSarthak Bansal0% (1)
- Control Theory ModulesDocumento53 páginasControl Theory ModulesSushmita KujurAinda não há avaliações
- Control Theory ModulesDocumento27 páginasControl Theory ModulesSushmita KujurAinda não há avaliações
- Introduction to Control Systems EngineeringDocumento28 páginasIntroduction to Control Systems EngineeringOmer Ahmed100% (1)
- Se201 (A4)Documento4 páginasSe201 (A4)Mehran Rasheed GorayaAinda não há avaliações
- Presentation 1Documento28 páginasPresentation 1Sithy JuhaniyaAinda não há avaliações
- PID Control System Analysis and DesignDocumento48 páginasPID Control System Analysis and DesignAsghar AliAinda não há avaliações
- Open loop PID tuning for 1st order systemsDocumento18 páginasOpen loop PID tuning for 1st order systemskarmoweldingAinda não há avaliações
- Understanding PID Control Using a Process Control UnitDocumento11 páginasUnderstanding PID Control Using a Process Control Unittk_atiqahAinda não há avaliações
- Closed Loop System AnalysisDocumento23 páginasClosed Loop System AnalysistkjingAinda não há avaliações
- Pe-3032 WK 1 Introduction To Control System March 04Documento70 páginasPe-3032 WK 1 Introduction To Control System March 04Charlton S.Inao100% (2)
- DcsDocumento75 páginasDcsrashm006ranjanAinda não há avaliações
- Exp - P9 - Pressure ControlDocumento9 páginasExp - P9 - Pressure ControlPriyanshu LilhaAinda não há avaliações
- Lecture No.1 - Control SystemsDocumento41 páginasLecture No.1 - Control SystemsCH MOHAMMAD ATTIR KHAYYAMAinda não há avaliações
- EVMS Full Notes PDFDocumento78 páginasEVMS Full Notes PDFNaveen DhanurajAinda não há avaliações
- IntroductionDocumento11 páginasIntroductionMr YERRYBBAinda não há avaliações
- Introduction to Control SystemsDocumento26 páginasIntroduction to Control SystemsNicole HyominAinda não há avaliações
- The Process May Be A Complex Assembly of PhenomenaDocumento9 páginasThe Process May Be A Complex Assembly of PhenomenaNishat AnwarAinda não há avaliações
- Control Lab Project ReportDocumento28 páginasControl Lab Project ReportDanyal QamarAinda não há avaliações
- PID ControllerDocumento44 páginasPID ControllerDeepthiAinda não há avaliações
- Model Based Controller Design For A Spherical TankDocumento6 páginasModel Based Controller Design For A Spherical TankInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- Control System Engineering: InstructorsDocumento49 páginasControl System Engineering: InstructorsShereen BawatnehAinda não há avaliações
- Control Sensors and Actuators: Lalith Gamage, PHDDocumento16 páginasControl Sensors and Actuators: Lalith Gamage, PHDrasika.ouAinda não há avaliações
- 4th Class, Production Engineering Department of Production Engineering and Metallurgy, University of Technology, BaghdadDocumento94 páginas4th Class, Production Engineering Department of Production Engineering and Metallurgy, University of Technology, BaghdadMegaroboMegaroboAinda não há avaliações
- Feedback Control TheoryDocumento16 páginasFeedback Control TheorykelvinAinda não há avaliações
- Watt's Speed Governor ForDocumento18 páginasWatt's Speed Governor ForMuhammad Tayyab YousafzaiAinda não há avaliações
- Pe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01Documento69 páginasPe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01OkingszackAinda não há avaliações
- PID ControlDocumento32 páginasPID ControlSyamil RahmanAinda não há avaliações
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseDocumento34 páginasProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshAinda não há avaliações
- Lab 5 ReportDocumento12 páginasLab 5 ReportMelaku DinkuAinda não há avaliações
- Name: Roll: Year: Department: Subject: Subject CodeDocumento11 páginasName: Roll: Year: Department: Subject: Subject CodeMayukh BiswasAinda não há avaliações
- EngM513 LAB Manual Automatic Control EngineeringDocumento23 páginasEngM513 LAB Manual Automatic Control Engineeringlacika04Ainda não há avaliações
- Group 4 Lab 5Documento16 páginasGroup 4 Lab 5Melaku DinkuAinda não há avaliações
- W1-Introduction of Control SystemDocumento59 páginasW1-Introduction of Control SystemFarzana AlyaAinda não há avaliações
- Chapter 6 PIDDocumento43 páginasChapter 6 PIDkibrom atsbhaAinda não há avaliações
- PID ControllersDocumento58 páginasPID Controllerss12originalAinda não há avaliações
- Mizan Tepi Campus Lab Report Speed Control of DC MotorDocumento16 páginasMizan Tepi Campus Lab Report Speed Control of DC MotorMelaku DinkuAinda não há avaliações
- Instrumentation and Process Control Sample ChaptersDocumento18 páginasInstrumentation and Process Control Sample ChaptersGurunath EpiliAinda não há avaliações
- Automated Manufacturing SystemsDocumento25 páginasAutomated Manufacturing SystemsSoto KunAinda não há avaliações
- FMEA Template for Failure AnalysisDocumento21 páginasFMEA Template for Failure AnalysisGauravBedreAinda não há avaliações
- Automatic Control Lecture OverviewDocumento56 páginasAutomatic Control Lecture OverviewGGAP LASTAinda não há avaliações
- PID CONTROLLER EXPERIMENTDocumento13 páginasPID CONTROLLER EXPERIMENTMohd KhairiAinda não há avaliações
- NI Tutorial 3782 enDocumento4 páginasNI Tutorial 3782 enpetergoodingAinda não há avaliações
- PIDTuningClassical - ControlsWikiDocumento14 páginasPIDTuningClassical - ControlsWikiksameer_coepAinda não há avaliações
- Control of DC Motor Using Different Control StrategiesNo EverandControl of DC Motor Using Different Control StrategiesAinda não há avaliações
- CH 1 PDFDocumento43 páginasCH 1 PDFVimala ElumalaiAinda não há avaliações
- EC-GATE-2012 KeyDocumento31 páginasEC-GATE-2012 KeypnrgoudAinda não há avaliações
- Z TransformDocumento59 páginasZ TransformDenise NelsonAinda não há avaliações
- Intro to Digital Signal ProcessingDocumento15 páginasIntro to Digital Signal Processingvimalaspl7831Ainda não há avaliações
- Lecture 1 Digital Signal Processing DR Mona LotfyDocumento1 páginaLecture 1 Digital Signal Processing DR Mona Lotfyvimalaspl7831Ainda não há avaliações
- Nodal PDFDocumento1 páginaNodal PDFvimalaspl7831Ainda não há avaliações
- Lecture 2 Digital Signal Processing DR Mona LotfyDocumento4 páginasLecture 2 Digital Signal Processing DR Mona Lotfyvimalaspl7831Ainda não há avaliações
- 3 Kundur DiffEq Implement HandoutsDocumento6 páginas3 Kundur DiffEq Implement Handoutsvimalaspl7831Ainda não há avaliações
- Needs MomDocumento4 páginasNeeds Momvimalaspl7831Ainda não há avaliações
- Two Port Networks: Unit - 6Documento15 páginasTwo Port Networks: Unit - 6vimalaspl7831Ainda não há avaliações
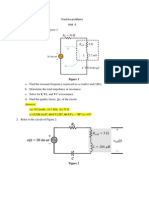
- Practice Problems-Unit 1 PDFDocumento1 páginaPractice Problems-Unit 1 PDFvimalaspl7831Ainda não há avaliações
- Unit 1 AmplifiersDocumento46 páginasUnit 1 Amplifiersvimalaspl7831Ainda não há avaliações
- 7a. Filters HandoutsDocumento6 páginas7a. Filters Handoutsvimalaspl7831Ainda não há avaliações
- 7a. Filters HandoutsDocumento6 páginas7a. Filters Handoutsvimalaspl7831Ainda não há avaliações
- Unit 1 AmplifiersDocumento46 páginasUnit 1 Amplifiersvimalaspl7831Ainda não há avaliações
- Different WordsDocumento1 páginaDifferent Wordsvimalaspl7831Ainda não há avaliações
- Sample Midterm1Documento1 páginaSample Midterm1vimalaspl7831Ainda não há avaliações
- AC FundamentalsDocumento15 páginasAC Fundamentalsvimalaspl7831Ainda não há avaliações
- Unit 3 OscillatorsDocumento20 páginasUnit 3 Oscillatorsvimalaspl7831Ainda não há avaliações
- Circle The Matching Number - Worksheet 3Documento1 páginaCircle The Matching Number - Worksheet 3vimalaspl7831Ainda não há avaliações
- Rajma Curry/red Kideny Beans Curry: From SwathiDocumento53 páginasRajma Curry/red Kideny Beans Curry: From Swathivimalaspl7831Ainda não há avaliações
- Write Missing Number Caterpillar Worksheet 1Documento1 páginaWrite Missing Number Caterpillar Worksheet 1vimalaspl7831Ainda não há avaliações
- CE - Eg4Documento3 páginasCE - Eg4vimalaspl7831Ainda não há avaliações
- Transistor Circuits (101-200) PDFDocumento76 páginasTransistor Circuits (101-200) PDFCarlos NettoAinda não há avaliações
- Practice Problems-Unit 5Documento2 páginasPractice Problems-Unit 5vimalaspl7831Ainda não há avaliações
- Method:: Tiffin Sambar IngredientsDocumento18 páginasMethod:: Tiffin Sambar Ingredientsvimalaspl7831Ainda não há avaliações
- Unit 3 - Q3 &Q7Documento4 páginasUnit 3 - Q3 &Q7vimalaspl7831Ainda não há avaliações
- 1140NDocumento6 páginas1140Nvimalaspl7831Ainda não há avaliações
- Tennis ResDocumento16 páginasTennis ResFrancescoAinda não há avaliações
- PRC PIC ApplicationDocumento1 páginaPRC PIC ApplicationJudy Mar ValdezAinda não há avaliações
- 10-NodeB WCDMA V200R015 Initial Data Configuration Based On CMEDocumento78 páginas10-NodeB WCDMA V200R015 Initial Data Configuration Based On CMESergio BuonomoAinda não há avaliações
- An Overview of The Bro Intrusion Detection System: Brian L. Tierney, Vern Paxson, James RothfussDocumento12 páginasAn Overview of The Bro Intrusion Detection System: Brian L. Tierney, Vern Paxson, James RothfussEmotelvad TeluskoAinda não há avaliações
- Inflight EntertainmentDocumento10 páginasInflight EntertainmentNeha BhatiaAinda não há avaliações
- Mid 210Documento16 páginasMid 210danecuprijaAinda não há avaliações
- CC103 Mod3Documento12 páginasCC103 Mod3Vincent SiaronAinda não há avaliações
- Maruthi Technologies: CCTV, Computer, Laptop, Ups - Sales, Service, Installation, Amc'S & SparesDocumento4 páginasMaruthi Technologies: CCTV, Computer, Laptop, Ups - Sales, Service, Installation, Amc'S & SparesMadhu EnterprisesAinda não há avaliações
- 1000 Artificial Intelligence MCQs For Freshers & Experienced - SanfoundryDocumento7 páginas1000 Artificial Intelligence MCQs For Freshers & Experienced - SanfoundryashokmvanjareAinda não há avaliações
- Red PagesDocumento146 páginasRed PagesmcastilhoAinda não há avaliações
- Examples of Staff Confidentiality Letters and AgreementsDocumento3 páginasExamples of Staff Confidentiality Letters and AgreementsCedric YabyabinAinda não há avaliações
- Matched Filter in RadarDocumento10 páginasMatched Filter in RadarTaha Assadi100% (1)
- Shantanu Narayen: Ceo - Adobe SystemsDocumento8 páginasShantanu Narayen: Ceo - Adobe SystemssumanAinda não há avaliações
- Interfacing With ABAP ProxyDocumento11 páginasInterfacing With ABAP ProxyAshishAinda não há avaliações
- UNA - Podcast ReleaseDocumento1 páginaUNA - Podcast Releaseandrew_mayesAinda não há avaliações
- Python Vs C++Documento14 páginasPython Vs C++Vimal PatelAinda não há avaliações
- High-Score IELTS Writting Model AnswersDocumento252 páginasHigh-Score IELTS Writting Model AnswersEBOOK SOSAinda não há avaliações
- SWOT analysis of an educational institutionDocumento8 páginasSWOT analysis of an educational institutionhashadsh100% (3)
- Keysight i3070 Inline 4 Module In-Circuit Test SystemDocumento11 páginasKeysight i3070 Inline 4 Module In-Circuit Test SystemDanielAinda não há avaliações
- Grafcet Automate Programmable PDFDocumento3 páginasGrafcet Automate Programmable PDFTabithaAinda não há avaliações
- Technical Note No. TN S02 Second Order Effects Safe and EtabsDocumento9 páginasTechnical Note No. TN S02 Second Order Effects Safe and EtabsVance KangAinda não há avaliações
- Agrivi Reviews 2021 - Details, Pricing, & Features - G2Documento8 páginasAgrivi Reviews 2021 - Details, Pricing, & Features - G2Tesfaye DegechissaAinda não há avaliações
- Samyu AgreementDocumento16 páginasSamyu AgreementMEENA VEERIAHAinda não há avaliações
- Network Service Paradigm - 584Documento6 páginasNetwork Service Paradigm - 584Entertainment's worldAinda não há avaliações
- English Worksheet #1 Third Term Student's Name: Johan Sebastian Plata Solano Grade: 10 - 1Documento3 páginasEnglish Worksheet #1 Third Term Student's Name: Johan Sebastian Plata Solano Grade: 10 - 1Johan PlataAinda não há avaliações
- EBSPROD - Switchover - Switchback - Version 1.0Documento20 páginasEBSPROD - Switchover - Switchback - Version 1.0Azeemahp PunekarAinda não há avaliações
- Cs 372Documento2 páginasCs 372Balakumar RamadossAinda não há avaliações
- Attachment 1Documento2 páginasAttachment 1SemutkecilAinda não há avaliações
- Signature Redacted Signature RedactedDocumento355 páginasSignature Redacted Signature Redactedraja_agarwal100Ainda não há avaliações
- 22 Managing Object DefinitionsDocumento22 páginas22 Managing Object DefinitionsJayaRam KothaAinda não há avaliações