Você também pode gostar
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- ASV Posi-Track PT-80 Track Loader Parts Catalogue Manual PDFDocumento14 páginasASV Posi-Track PT-80 Track Loader Parts Catalogue Manual PDFfisekkkdAinda não há avaliações
- Simovert Masterdrives VCDocumento16 páginasSimovert Masterdrives VCangeljavier9Ainda não há avaliações
- Business Analyst Interview QuestionsDocumento49 páginasBusiness Analyst Interview Questionsmital patel100% (4)
- Floor ManualDocumento35 páginasFloor ManualGihan ChathurangaAinda não há avaliações
- Loftware Spectrum User GuideDocumento1.646 páginasLoftware Spectrum User GuideRupesh Kumar67% (3)
- Grade 9 ICT Network Configuration GuideDocumento15 páginasGrade 9 ICT Network Configuration GuideMark Anthony Nieva RafalloAinda não há avaliações
- SDLC Phases Feasibility Analysis RequirementsDocumento4 páginasSDLC Phases Feasibility Analysis RequirementsBrandon Mitchell0% (1)
- Ln26r71bd Ln-s2652d Ln26r71b Ln32r71bd LN s3252d DiagramaDocumento261 páginasLn26r71bd Ln-s2652d Ln26r71b Ln32r71bd LN s3252d DiagramaVictor Julio AlvarezAinda não há avaliações
- MTO Response Letter 0609Documento3 páginasMTO Response Letter 0609hwy7and8Ainda não há avaliações
- Converting Urban Waste To EnergyDocumento11 páginasConverting Urban Waste To EnergyDéépákAinda não há avaliações
- Imageclass Lbp611cn 613cdw 2Documento2 páginasImageclass Lbp611cn 613cdw 2Maulana Ikhwan SadikinAinda não há avaliações
- 24C02BN Su18Documento26 páginas24C02BN Su18Dwp BhaskaranAinda não há avaliações
- Ax2012 Enus Sam 04 PDFDocumento26 páginasAx2012 Enus Sam 04 PDFErnesto J DuranAinda não há avaliações
- 64-2103 Tweco Pistolas WeldskillDocumento6 páginas64-2103 Tweco Pistolas WeldskillcarlosAinda não há avaliações
- VisQ Queue Manager System Guide Version 10.3Documento27 páginasVisQ Queue Manager System Guide Version 10.3MSC Nastran Beginner100% (1)
- Strategic Human Resource Management and The HR ScorecardDocumento20 páginasStrategic Human Resource Management and The HR ScorecardRajat JainAinda não há avaliações
- AKA DP Close Bus Ring SolutionsDocumento2 páginasAKA DP Close Bus Ring Solutionssun qiAinda não há avaliações
- By Himanshu Panwar Asst. Prof. Civil Engineering Department AkgecDocumento34 páginasBy Himanshu Panwar Asst. Prof. Civil Engineering Department AkgecAlok0% (1)
- John Deere 125 HP PDFDocumento2 páginasJohn Deere 125 HP PDFJulio TovarAinda não há avaliações
- Managing Information for Better DecisionsDocumento12 páginasManaging Information for Better DecisionsTosin WilliamsAinda não há avaliações
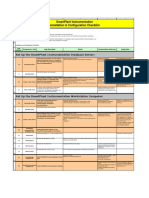
- SmartPlant Instrumentation installation checklistDocumento2 páginasSmartPlant Instrumentation installation checklistmnoormohamed82Ainda não há avaliações
- Eaton 9130 Rack 700-3000vaDocumento4 páginasEaton 9130 Rack 700-3000vaJose Luis PintoAinda não há avaliações
- Model Manajemen Rantai Pasok Industri Perikanan Tangkap Berkelanjutan Di Propinsi MalukuDocumento12 páginasModel Manajemen Rantai Pasok Industri Perikanan Tangkap Berkelanjutan Di Propinsi MalukuEmanuellaAinda não há avaliações
- Diligence International Group Understands MexicoDocumento2 páginasDiligence International Group Understands MexicoPR.comAinda não há avaliações
- Final year project presentationDocumento13 páginasFinal year project presentationbadg15594Ainda não há avaliações
- Technology in Supply Chain ManagementDocumento8 páginasTechnology in Supply Chain ManagementjasmineAinda não há avaliações
- Sparc t8 2 Ds 3864232 PDFDocumento6 páginasSparc t8 2 Ds 3864232 PDFanhtuan29Ainda não há avaliações
- How To Setup CM Notify SyncDocumento2 páginasHow To Setup CM Notify SyncascfsfAinda não há avaliações
- The Device Is Running PDFDocumento22 páginasThe Device Is Running PDFBint MustaphaAinda não há avaliações
- EZSkin v3 User GuideDocumento16 páginasEZSkin v3 User GuidePg1978Ainda não há avaliações