Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Mash MethodDocumento28 páginasMash MethodShuvajoyyy100% (5)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- 18 Tricks To Teach Your BodyDocumento4 páginas18 Tricks To Teach Your BodyigiAinda não há avaliações
- DR - BD S Step 1 Guide - PDF Filename UTF-8 DR - BD S Step 1 GuideDocumento24 páginasDR - BD S Step 1 Guide - PDF Filename UTF-8 DR - BD S Step 1 GuideAdeelMunawarAinda não há avaliações
- MS RESPIbfrDocumento13 páginasMS RESPIbfrEmeroot RootAinda não há avaliações
- Induced Lactation ANR SlidesDocumento11 páginasInduced Lactation ANR Slidesjohn cageAinda não há avaliações
- Enls V 4 0 Protocol Coma FinalDocumento16 páginasEnls V 4 0 Protocol Coma Finalsucipto suciptoAinda não há avaliações
- Importance of Anaerobic Glycolysis & Stiffness in SprintsDocumento7 páginasImportance of Anaerobic Glycolysis & Stiffness in SprintsAltec AlsingAinda não há avaliações
- John-Dylan Haynes and Geraint Rees - Decoding Mental States From Brain Activity in HumansDocumento12 páginasJohn-Dylan Haynes and Geraint Rees - Decoding Mental States From Brain Activity in HumansNoScriptAinda não há avaliações
- Stoichiometry of Microbial Growth and Product FormationDocumento10 páginasStoichiometry of Microbial Growth and Product FormationfayeAinda não há avaliações
- Robert Leeb Et Al - A Tetraplegic Patient Controls A Wheelchair in Virtual RealityDocumento4 páginasRobert Leeb Et Al - A Tetraplegic Patient Controls A Wheelchair in Virtual RealityNoScriptAinda não há avaliações
- Steven Lemm, Christin Schafer and Gabriel Curio - Aggregating Classification Accuracy Across Time: Application To Single Trial EEGDocumento8 páginasSteven Lemm, Christin Schafer and Gabriel Curio - Aggregating Classification Accuracy Across Time: Application To Single Trial EEGNoScriptAinda não há avaliações
- Leonard J. Trejo Et Al - Multimodal Neuroelectric Interface DevelopmentDocumento6 páginasLeonard J. Trejo Et Al - Multimodal Neuroelectric Interface DevelopmentNoScriptAinda não há avaliações
- John Shawe-Taylor - Centre For Computational Statistics and Machine LearningDocumento24 páginasJohn Shawe-Taylor - Centre For Computational Statistics and Machine LearningNoScriptAinda não há avaliações
- Cédric Arrouët Et Al - Open-ViBE: A 3D Platform For Real-Time NeuroscienceDocumento22 páginasCédric Arrouët Et Al - Open-ViBE: A 3D Platform For Real-Time NeuroscienceNoScriptAinda não há avaliações
- Jean-Marc Vesin and Touradj Ebrahimi - Trends in Brain Computer InterfacesDocumento94 páginasJean-Marc Vesin and Touradj Ebrahimi - Trends in Brain Computer InterfacesNoScriptAinda não há avaliações
- Katarzyna Blinowska Et Al - Multimodal Imaging of Human Brain Activity: Rational, Biophysical Aspects and Modes of IntegrationDocumento10 páginasKatarzyna Blinowska Et Al - Multimodal Imaging of Human Brain Activity: Rational, Biophysical Aspects and Modes of IntegrationNoScriptAinda não há avaliações
- R. Begg and J. Kamruzzaman - A Machine Learning Approach For Automated Recognition of Movement Patterns Using Basic, Kinetic and Kinematic Gait DataDocumento8 páginasR. Begg and J. Kamruzzaman - A Machine Learning Approach For Automated Recognition of Movement Patterns Using Basic, Kinetic and Kinematic Gait DataNoScriptAinda não há avaliações
- Ye Yang - Pattern Analysis of Functional MRI DataDocumento41 páginasYe Yang - Pattern Analysis of Functional MRI DataNoScriptAinda não há avaliações
- Roman Rosipal - Kernel-Based Regression and Objective Nonlinear Measures To Assess Brain FunctioningDocumento106 páginasRoman Rosipal - Kernel-Based Regression and Objective Nonlinear Measures To Assess Brain FunctioningNoScriptAinda não há avaliações
- Thomas Navin Lal Et Al - A Brain Computer Interface With Online Feedback Based On MagnetoencephalographyDocumento8 páginasThomas Navin Lal Et Al - A Brain Computer Interface With Online Feedback Based On MagnetoencephalographyNoScriptAinda não há avaliações
- Vincent Guigue Et Al - Translation Invariant Classification of Non-Stationary SignalsDocumento6 páginasVincent Guigue Et Al - Translation Invariant Classification of Non-Stationary SignalsNoScriptAinda não há avaliações
- Henrik Ohlsson - Regression On Manifolds With Implications For System IdentificationDocumento115 páginasHenrik Ohlsson - Regression On Manifolds With Implications For System IdentificationNoScriptAinda não há avaliações
- Barry Chai Et Al - Exploring Functional Connectivity of The Human Brain Using Multivariate Information AnalysisDocumento9 páginasBarry Chai Et Al - Exploring Functional Connectivity of The Human Brain Using Multivariate Information AnalysisNoScriptAinda não há avaliações
- Kay H. Brodersen - Decoding Mental Activity From Neuroimaging Data - The Science Behind Mind-ReadingDocumento7 páginasKay H. Brodersen - Decoding Mental Activity From Neuroimaging Data - The Science Behind Mind-ReadingNoScriptAinda não há avaliações
- Anders Eklund Et Al - Using Real-Time fMRI To Control A Dynamical System by Brain Activity ClassificationDocumento8 páginasAnders Eklund Et Al - Using Real-Time fMRI To Control A Dynamical System by Brain Activity ClassificationNoScriptAinda não há avaliações
- Yukiyasu Kamitani and Frank Tong - Decoding The Visual and Subjective Contents of The Human BrainDocumento18 páginasYukiyasu Kamitani and Frank Tong - Decoding The Visual and Subjective Contents of The Human BrainNoScriptAinda não há avaliações
- Henrik Ohlsson Et Al - Enabling Bio-Feedback Using Real-Time fMRIDocumento6 páginasHenrik Ohlsson Et Al - Enabling Bio-Feedback Using Real-Time fMRINoScriptAinda não há avaliações
- Xuerui Wang, Rebecca Hutchinson and Tom M. Mitchell - Training fMRI Classifiers To Detect Cognitive States Across Multiple Human SubjectsDocumento8 páginasXuerui Wang, Rebecca Hutchinson and Tom M. Mitchell - Training fMRI Classifiers To Detect Cognitive States Across Multiple Human SubjectsNoScriptAinda não há avaliações
- James Ford Et Al - Patient Classi Cation of fMRI Activation MapsDocumento8 páginasJames Ford Et Al - Patient Classi Cation of fMRI Activation MapsNoScriptAinda não há avaliações
- Nikolaus Weiskopf Et Al - Principles of A Brain-Computer Interface (BCI) Based On Real-Time Functional Magnetic Resonance Imaging (fMRI)Documento5 páginasNikolaus Weiskopf Et Al - Principles of A Brain-Computer Interface (BCI) Based On Real-Time Functional Magnetic Resonance Imaging (fMRI)NoScriptAinda não há avaliações
- Kendrick N. Kay Et Al - Identifying Natural Images From Human Brain ActivityDocumento5 páginasKendrick N. Kay Et Al - Identifying Natural Images From Human Brain ActivityNoScriptAinda não há avaliações
- Tom M. Mitchell Et Al - Classifying Instantaneous Cognitive States From fMRI DataDocumento5 páginasTom M. Mitchell Et Al - Classifying Instantaneous Cognitive States From fMRI DataNoScriptAinda não há avaliações
- Hasan Ayaz Et Al - Detecting Cognitive Activity Related Hemodynamic Signal For Brain Computer Interface Using Functional Near Infrared SpectrosDocumento5 páginasHasan Ayaz Et Al - Detecting Cognitive Activity Related Hemodynamic Signal For Brain Computer Interface Using Functional Near Infrared SpectrosNoScriptAinda não há avaliações
- Theoretical, Statistical, and Practical Perspectives On Pattern-Based Classification Approaches To The Analysis of Functional Neuroimaging DataDocumento19 páginasTheoretical, Statistical, and Practical Perspectives On Pattern-Based Classification Approaches To The Analysis of Functional Neuroimaging DataNoScriptAinda não há avaliações
- Decoding Cognitive States From fMRI Data Using Support Vector RegressionDocumento14 páginasDecoding Cognitive States From fMRI Data Using Support Vector RegressionNoScriptAinda não há avaliações
- Sean M. Polyn Et Al - Category-Specific Cortical Activity Precedes Retrieval During Memory SearchDocumento5 páginasSean M. Polyn Et Al - Category-Specific Cortical Activity Precedes Retrieval During Memory SearchNoScriptAinda não há avaliações
- John-Dylan Haynes and Geraint Rees - Predicting The Orientation of Invisible Stimuli From Activity in Human Primary Visual CortexDocumento15 páginasJohn-Dylan Haynes and Geraint Rees - Predicting The Orientation of Invisible Stimuli From Activity in Human Primary Visual CortexNoScriptAinda não há avaliações
- Lab 09 HandoutDocumento8 páginasLab 09 HandoutHyenaAinda não há avaliações
- Fluid and Electrolyte Therapy in NewbornsDocumento10 páginasFluid and Electrolyte Therapy in NewbornsJaner BanosAinda não há avaliações
- Physiology of Digestive SystemDocumento95 páginasPhysiology of Digestive SystemEsha KumavatAinda não há avaliações
- Fantasy/Imagination: Patti M. ValkenburgDocumento3 páginasFantasy/Imagination: Patti M. ValkenburgalbertoadalidAinda não há avaliações
- ACLS JeopardyDocumento3 páginasACLS JeopardyLaylee Clare100% (1)
- KS3 Human Organ SystemDocumento2 páginasKS3 Human Organ Systemejljn1Ainda não há avaliações
- Veta 3 - Datasheet - ENG - 20210315Documento2 páginasVeta 3 - Datasheet - ENG - 20210315JuanAinda não há avaliações
- Synevo Results 5Documento3 páginasSynevo Results 5Kenan BagirAinda não há avaliações
- Laser removal of lower lip mucoceleDocumento5 páginasLaser removal of lower lip mucoceleDevi AlfianiAinda não há avaliações
- Comparison Between Intrauterine Insemination With Ovulation Induction Versus Natural Ovulatory Cycle in Male Factor of InfertilityDocumento74 páginasComparison Between Intrauterine Insemination With Ovulation Induction Versus Natural Ovulatory Cycle in Male Factor of InfertilityMohammed Ahmed AzabAinda não há avaliações
- Understanding CLL: A Guide For Patients Who Want To Take Charge of Chronic Lymphocytic LeukemiaDocumento4 páginasUnderstanding CLL: A Guide For Patients Who Want To Take Charge of Chronic Lymphocytic LeukemiaNakul Singh ParkwayIndiaAinda não há avaliações
- Unit I Clothing Science Two Marks With Answer and Question BankDocumento3 páginasUnit I Clothing Science Two Marks With Answer and Question BankSivakumar KAinda não há avaliações
- Facial Action Coding SystemDocumento13 páginasFacial Action Coding SystemBarkha ShahAinda não há avaliações
- Anaphy (Intro - Skeletal System) ReviewerDocumento34 páginasAnaphy (Intro - Skeletal System) ReviewerYanna G.Ainda não há avaliações
- Classification and Types of StrokeDocumento11 páginasClassification and Types of StrokeJose Enrique OrtizAinda não há avaliações
- Adaptasi Biota LautDocumento19 páginasAdaptasi Biota LautBudhi Agung Prasetyo100% (1)
- 22.3 Anatomy Study Resources - A PDFDocumento3 páginas22.3 Anatomy Study Resources - A PDFNothingAinda não há avaliações
- Sleep & Traumatic Brain InjuryDocumento3 páginasSleep & Traumatic Brain Injury彭金辉 KIVIAinda não há avaliações
- Cormie2011 PDFDocumento22 páginasCormie2011 PDFGust AvoAinda não há avaliações
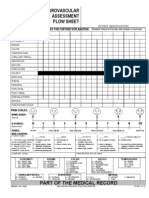
- NeuroVas Assessment.2Documento2 páginasNeuroVas Assessment.2ROxiie RakiztaAinda não há avaliações
- Cellular ComponentsDocumento2 páginasCellular ComponentsWangSheng TanAinda não há avaliações
- Introduction to Biomolecules and Cellular ComponentsDocumento18 páginasIntroduction to Biomolecules and Cellular ComponentsM Nur M. MahmudAinda não há avaliações