Você também pode gostar
- Card College Volume 1Documento267 páginasCard College Volume 1ulf anders100% (4)
- 2004 - Poole, Das - Anthropology in The Margin of The StateDocumento174 páginas2004 - Poole, Das - Anthropology in The Margin of The StateMari Ning100% (2)
- (Andrzej Lasota, Michael C. Mackey) Chaos, Fractal PDFDocumento490 páginas(Andrzej Lasota, Michael C. Mackey) Chaos, Fractal PDFAngel Leon Geronimo100% (1)
- Jack Benjamin, C. A. Cornell-Probability, Statistics, and Decisions For Civil Engineers - McGraw-Hill Companies (1960)Documento287 páginasJack Benjamin, C. A. Cornell-Probability, Statistics, and Decisions For Civil Engineers - McGraw-Hill Companies (1960)mrswcecivil100% (11)
- Artificial Neural Networks An Econometric PerspectiveDocumento98 páginasArtificial Neural Networks An Econometric PerspectiveHector Aguilar TorresAinda não há avaliações
- Truth MattersDocumento537 páginasTruth MattersAlexisTorres75% (4)
- Microsoft Word - Arbitrary Reference Frame TheoryDocumento8 páginasMicrosoft Word - Arbitrary Reference Frame Theorysameerpatel157700% (1)
- Neural Networks in A Softcomputing FrameworkDocumento67 páginasNeural Networks in A Softcomputing FrameworkEmilio GarcíaAinda não há avaliações
- History of Neural NetworksDocumento34 páginasHistory of Neural NetworksScribedSkypeAinda não há avaliações
- Fqxi Essay 2017 RGDocumento9 páginasFqxi Essay 2017 RGFrancisco Vega GarciaAinda não há avaliações
- Development and Application of Artificial Neural NetworkDocumento12 páginasDevelopment and Application of Artificial Neural Networkmesay bahiruAinda não há avaliações
- Neural Networks, Radial Basis Functions, and ComplexityDocumento26 páginasNeural Networks, Radial Basis Functions, and ComplexityAndrei CondreaAinda não há avaliações
- Neural NetworksDocumento38 páginasNeural Networkstt_aljobory3911Ainda não há avaliações
- Learning in Feedforward Layered Networks: The Tiling AlgorithmDocumento13 páginasLearning in Feedforward Layered Networks: The Tiling AlgorithmOgnjen OzegovicAinda não há avaliações
- ConnectionismDocumento9 páginasConnectionismjoseph458Ainda não há avaliações
- Introduction To Statistical Physics-57314317Documento131 páginasIntroduction To Statistical Physics-57314317Augusto MenezesAinda não há avaliações
- NN Basics Tutorial 2004Documento46 páginasNN Basics Tutorial 2004dunertoAinda não há avaliações
- Use of Neural Nets For Dynamic Modeling and Control of Chemical Process SystemsDocumento10 páginasUse of Neural Nets For Dynamic Modeling and Control of Chemical Process Systemsccnew3000Ainda não há avaliações
- Unit-4 AimlDocumento27 páginasUnit-4 AimlRAFIQAinda não há avaliações
- A Conceptual Version of The K-Means Algorithm: Pattern Recognition LettersDocumento11 páginasA Conceptual Version of The K-Means Algorithm: Pattern Recognition LettersMiguel Katsuyi Ayala KanashiroAinda não há avaliações
- Proposing Solution To XOR Problem Using Minimum Configuration MLPDocumento8 páginasProposing Solution To XOR Problem Using Minimum Configuration MLPAlexa NicoleAinda não há avaliações
- Computer Scientist Finds Small-Memory Algorithm For Fundamental Graph ProblemDocumento3 páginasComputer Scientist Finds Small-Memory Algorithm For Fundamental Graph ProblemARC87Ainda não há avaliações
- Breaking The Curse of Dimensionality With Convex Neural NetworksDocumento53 páginasBreaking The Curse of Dimensionality With Convex Neural NetworksJonny BidonAinda não há avaliações
- Acta Numerica 1999 Volume 8 CompressDocumento299 páginasActa Numerica 1999 Volume 8 CompressFernanda LuisaAinda não há avaliações
- C1 Support IJNME43Documento25 páginasC1 Support IJNME43Daniel ClaudiuAinda não há avaliações
- Psychol Limits NNDocumento11 páginasPsychol Limits NNniwdex12Ainda não há avaliações
- Evolving Neural Network Using Real Coded Genetic Algorithm (GA) For Multispectral Image ClassificationDocumento13 páginasEvolving Neural Network Using Real Coded Genetic Algorithm (GA) For Multispectral Image Classificationjkl316Ainda não há avaliações
- Perceptron - WikipediaDocumento9 páginasPerceptron - WikipediaNoles PandeAinda não há avaliações
- Statistical Mechanics of Multiple Scales of Neocortical InteractionsDocumento78 páginasStatistical Mechanics of Multiple Scales of Neocortical InteractionsLester IngberAinda não há avaliações
- Unit 1Documento25 páginasUnit 1Ramya KanagarajAinda não há avaliações
- Fuzzy & Nural NetworkDocumento24 páginasFuzzy & Nural NetworkRavi ShankarAinda não há avaliações
- Biological NeuronsDocumento37 páginasBiological NeuronsCharles TaylorAinda não há avaliações
- Jean Faber and Gilson A. Giraldi - Quantum Models For Artifcial Neural NetworkDocumento8 páginasJean Faber and Gilson A. Giraldi - Quantum Models For Artifcial Neural Networkdcsi3Ainda não há avaliações
- Clustering Hierarchical AlgorithmsDocumento21 páginasClustering Hierarchical AlgorithmsjhoysAinda não há avaliações
- Computational Social ScineceDocumento21 páginasComputational Social ScineceAndrej KranjecAinda não há avaliações
- Theory and Applications of Compressed Sensing: Gitta Kutyniok October 15, 2018Documento25 páginasTheory and Applications of Compressed Sensing: Gitta Kutyniok October 15, 2018GilbertAinda não há avaliações
- 3 Weighted Networks - The Perceptron: 3.1 Perceptrons and Parallel ProcessingDocumento22 páginas3 Weighted Networks - The Perceptron: 3.1 Perceptrons and Parallel ProcessingArjun HajongAinda não há avaliações
- Preliminary OWR 2018 11Documento29 páginasPreliminary OWR 2018 11Jaweria AmjadAinda não há avaliações
- Artificial Neural Network: 1 BackgroundDocumento13 páginasArtificial Neural Network: 1 Backgroundyua_ntAinda não há avaliações
- A Primer On Kernel Methods PDFDocumento42 páginasA Primer On Kernel Methods PDFhari_sree88Ainda não há avaliações
- Parallel Distributed Processing Explorations in The Microstructure of CognitionDocumento39 páginasParallel Distributed Processing Explorations in The Microstructure of CognitioncleatushorseAinda não há avaliações
- The Architecture of Complex SystemsDocumento8 páginasThe Architecture of Complex SystemsSamuelAinda não há avaliações
- Fncom 09 00094Documento9 páginasFncom 09 00094Sandeep NairAinda não há avaliações
- T H e Capacity of The Hopfield Associative M e M o Ry: (Cf. FL)Documento22 páginasT H e Capacity of The Hopfield Associative M e M o Ry: (Cf. FL)Anamul HaqueAinda não há avaliações
- Review of Perceptrons An Introduction To Computat PDFDocumento3 páginasReview of Perceptrons An Introduction To Computat PDFlucasbotelhodacruzAinda não há avaliações
- What Are Neural NetsDocumento4 páginasWhat Are Neural NetsCVDSCRIBAinda não há avaliações
- Some Theorems For Feed Forward Neural Networks: K. Eswaran Vishwajeet SinghDocumento17 páginasSome Theorems For Feed Forward Neural Networks: K. Eswaran Vishwajeet SinghBagya GaneshAinda não há avaliações
- Efficient Behavior of Small-World NetworksDocumento5 páginasEfficient Behavior of Small-World NetworksKobe BrianAinda não há avaliações
- PerceptronDocumento8 páginasPerceptronJavier Garcia RajoyAinda não há avaliações
- Review of Perceptrons An Introduction To ComputatDocumento3 páginasReview of Perceptrons An Introduction To ComputatSeverin BenzAinda não há avaliações
- Handbook of Research On Machine Learning Applications and TrendsDocumento34 páginasHandbook of Research On Machine Learning Applications and TrendsAbdelkrim KefifAinda não há avaliações
- Barabasi - Rev Mod Phy 2002 - Complex NetworksDocumento51 páginasBarabasi - Rev Mod Phy 2002 - Complex Networksjgonzalezsanz8914Ainda não há avaliações
- Statistic Mechanis of Complex NetworksDocumento51 páginasStatistic Mechanis of Complex NetworksRodrigo CollinAinda não há avaliações
- 2012 - Analysis of The Influence of Forestry Environments On The Accuracy of GPS Measurements by Means of Recurrent Neural NetworksDocumento8 páginas2012 - Analysis of The Influence of Forestry Environments On The Accuracy of GPS Measurements by Means of Recurrent Neural NetworksSilverio G. CortesAinda não há avaliações
- Computation of Shortest Path in Cellular AutomataDocumento10 páginasComputation of Shortest Path in Cellular AutomataMariusz BarańskiAinda não há avaliações
- Learning Algorithms Utilizing Quasi-Geodesic Flows On The Stiefel ManifoldDocumento30 páginasLearning Algorithms Utilizing Quasi-Geodesic Flows On The Stiefel ManifoldShafayat AbrarAinda não há avaliações
- Introduction To The Theory of Neural ComputationDocumento18 páginasIntroduction To The Theory of Neural ComputationJon Arnold GreyAinda não há avaliações
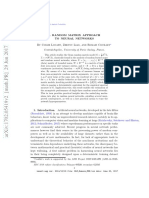
- RMT Aproach To NNDocumento63 páginasRMT Aproach To NNxofpwualcygbvrucsAinda não há avaliações
- RAM-based Neural NetworksDocumento251 páginasRAM-based Neural NetworksRaphael AlcairesAinda não há avaliações
- On The Properties of Small-World Network Models: HE Uropean Hysical OurnalDocumento14 páginasOn The Properties of Small-World Network Models: HE Uropean Hysical OurnalMouliAinda não há avaliações
- 9 Cryptical Learning IsDocumento5 páginas9 Cryptical Learning IsRichard BryanAinda não há avaliações
- Study On Neutrosophic Graph With Application in Wireless NetworkDocumento7 páginasStudy On Neutrosophic Graph With Application in Wireless NetworkScience DirectAinda não há avaliações
- (U.john Hopkins) Matrix Computations (3rd Ed.)Documento723 páginas(U.john Hopkins) Matrix Computations (3rd Ed.)phucborso150% (2)
- Feedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsNo EverandFeedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsAinda não há avaliações
- Complex Analysis, Functional Analysis and Approximation TheoryNo EverandComplex Analysis, Functional Analysis and Approximation TheoryAinda não há avaliações
- Kjell O. E. Elenius and Hans G. C. Tråvén - Multi-Layer Perceptrons and Probabilistic Neural Networks For Phoneme RecognitionDocumento4 páginasKjell O. E. Elenius and Hans G. C. Tråvén - Multi-Layer Perceptrons and Probabilistic Neural Networks For Phoneme RecognitionAsvcxvAinda não há avaliações
- Martin Bogdan and Michael Bensch - Artificial Neural Networks and Machine Learning For Man-Machine-Interfaces - Processing of Nervous SignalsDocumento10 páginasMartin Bogdan and Michael Bensch - Artificial Neural Networks and Machine Learning For Man-Machine-Interfaces - Processing of Nervous SignalsAsvcxvAinda não há avaliações
- Marco Gori and Franco Scarselli - Are Multilayer Perceptrons Adequate For Pattern Recognition and Verification?Documento12 páginasMarco Gori and Franco Scarselli - Are Multilayer Perceptrons Adequate For Pattern Recognition and Verification?AsvcxvAinda não há avaliações
- J. A. K. Suykens, J. Vandewalle and B. de Moor - Lur'e Systems With Multilayer Perceptron and Recurrent Neural Networks: Absolute Stability and DissipativityDocumento5 páginasJ. A. K. Suykens, J. Vandewalle and B. de Moor - Lur'e Systems With Multilayer Perceptron and Recurrent Neural Networks: Absolute Stability and DissipativityAsvcxvAinda não há avaliações
- C. Bunzmann, M. Biehl and R. Urbanczik - Learning Multilayer Perceptrons EfficientlyDocumento5 páginasC. Bunzmann, M. Biehl and R. Urbanczik - Learning Multilayer Perceptrons EfficientlyAsvcxvAinda não há avaliações
- Support Vector and Multilayer Perceptron Neural Networks Applied To Power Systems Transient Stability Analysis With Input Dimensionality ReductionDocumento6 páginasSupport Vector and Multilayer Perceptron Neural Networks Applied To Power Systems Transient Stability Analysis With Input Dimensionality ReductionAsvcxvAinda não há avaliações
- Mattias Ohlsson - Exercise I: Perceptrons and Multi-Layer Perceptrons For Classification and Prediction of Time SeriesDocumento13 páginasMattias Ohlsson - Exercise I: Perceptrons and Multi-Layer Perceptrons For Classification and Prediction of Time SeriesAsvcxvAinda não há avaliações
- Multilayer PerceptronsDocumento6 páginasMultilayer PerceptronsAsvcxvAinda não há avaliações
- Jenq-Neng Hwang Et Al - Classification Boundaries and Gradients of Trained Multilayer PerceptronsDocumento4 páginasJenq-Neng Hwang Et Al - Classification Boundaries and Gradients of Trained Multilayer PerceptronsAsvcxvAinda não há avaliações
- Sabrina Gerth and Peter Beim Graben - Unifying Syntactic Theory and Sentence Processing Difficulty Through A Connectionist Minimalist ParserDocumento20 páginasSabrina Gerth and Peter Beim Graben - Unifying Syntactic Theory and Sentence Processing Difficulty Through A Connectionist Minimalist ParserAsvcxvAinda não há avaliações
- Taehwan Kim and Tulay Adali - Approximation by Fully Complex Multilayer PerceptronsDocumento27 páginasTaehwan Kim and Tulay Adali - Approximation by Fully Complex Multilayer PerceptronsAsvcxvAinda não há avaliações
- Lotte Fabien Et Al - Studying The Use of Fuzzy Inference Systems For Motor Imagery ClassificationDocumento3 páginasLotte Fabien Et Al - Studying The Use of Fuzzy Inference Systems For Motor Imagery ClassificationAsvcxvAinda não há avaliações
- Ozgur Kisi - Multi-Layer Perceptrons With Levenberg - Marquardt Training Algorithm For Suspended Sediment Concentration Prediction and EstimationDocumento16 páginasOzgur Kisi - Multi-Layer Perceptrons With Levenberg - Marquardt Training Algorithm For Suspended Sediment Concentration Prediction and EstimationAsvcxvAinda não há avaliações
- MLP 2Documento12 páginasMLP 2KALYANpwnAinda não há avaliações
- Multilayer Perceptrons and Backpropagation Learning: 1 Some HistoryDocumento6 páginasMultilayer Perceptrons and Backpropagation Learning: 1 Some HistoryIgnacio IriarteAinda não há avaliações
- Mayer August, Wiesbauer Gerald and Spitzlinger Markus - Applications of Hopfield NetworksDocumento30 páginasMayer August, Wiesbauer Gerald and Spitzlinger Markus - Applications of Hopfield NetworksAsvcxvAinda não há avaliações
- Jasmin Steinwender and Sebastian Bitzer - Multilayer PerceptronsDocumento36 páginasJasmin Steinwender and Sebastian Bitzer - Multilayer PerceptronsAsvcxvAinda não há avaliações
- Omar AlZoubi, Irena Koprinska and Rafael A. Calvo - Classification of Brain-Computer Interface DataDocumento9 páginasOmar AlZoubi, Irena Koprinska and Rafael A. Calvo - Classification of Brain-Computer Interface DataAsvcxvAinda não há avaliações
- Ramaswamy Palaniappan - Brain Computer Interface Design Using Band Powers Extracted During Mental TasksDocumento4 páginasRamaswamy Palaniappan - Brain Computer Interface Design Using Band Powers Extracted During Mental TasksAsvcxvAinda não há avaliações
- Ramez T. Mina Et Al - Brain-Computer Interface Based On Classification of Statistical and Power Spectral Density FeaturesDocumento4 páginasRamez T. Mina Et Al - Brain-Computer Interface Based On Classification of Statistical and Power Spectral Density FeaturesAsvcxvAinda não há avaliações
- F Lotte Et Al - A Review of Classi Cation Algorithms For EEG-based Brain-Computer InterfacesDocumento24 páginasF Lotte Et Al - A Review of Classi Cation Algorithms For EEG-based Brain-Computer InterfacesAsvcxvAinda não há avaliações
- Choi Nang So and J. Godfrey Lucas - Neural Network Classifier and Filtering For EEG Detection in Brain-Computer Interface DeviceDocumento5 páginasChoi Nang So and J. Godfrey Lucas - Neural Network Classifier and Filtering For EEG Detection in Brain-Computer Interface DeviceAsvcxvAinda não há avaliações
- Janis J Daly and Jonathan R Wolpaw - Brain-Computer Interfaces in Neurological RehabilitationDocumento12 páginasJanis J Daly and Jonathan R Wolpaw - Brain-Computer Interfaces in Neurological RehabilitationAsvcxvAinda não há avaliações
- Soroosh Solhjoo Et Al - Classification of Chaotic Signals Using HMM Classifiers: EEG-Based Mental Task ClassificationDocumento4 páginasSoroosh Solhjoo Et Al - Classification of Chaotic Signals Using HMM Classifiers: EEG-Based Mental Task ClassificationAsvcxvAinda não há avaliações
- Esa 2 Piaggio PisaDocumento71 páginasEsa 2 Piaggio PisaFlavia GaudioAinda não há avaliações
- Ashish Kapoor, Pradeep Shenoy and Desney Tan - Combining Brain Computer Interfaces With Vision For Object CategorizationDocumento8 páginasAshish Kapoor, Pradeep Shenoy and Desney Tan - Combining Brain Computer Interfaces With Vision For Object CategorizationAsvcxvAinda não há avaliações
- Krunoslav Kovac - Multitask Learning For Bayesian Neural NetworksDocumento100 páginasKrunoslav Kovac - Multitask Learning For Bayesian Neural NetworksAsvcxvAinda não há avaliações
- Xiaoyuan Zhu Et Al - Expectation-Maximization Method For EEG-Based Continuous Cursor ControlDocumento11 páginasXiaoyuan Zhu Et Al - Expectation-Maximization Method For EEG-Based Continuous Cursor ControlAsvcxvAinda não há avaliações
- Kouhyar Tavakolian Et Al - Mental Task Classification For Brain Computer Interface ApplicationsDocumento6 páginasKouhyar Tavakolian Et Al - Mental Task Classification For Brain Computer Interface ApplicationsAsvcxvAinda não há avaliações
- The Scientific MethodDocumento215 páginasThe Scientific MethodMelanie Tagudin TrinidadAinda não há avaliações
- Professional DevelopmentDocumento12 páginasProfessional Developmentapi-437704700Ainda não há avaliações
- Addison, Catherine - Terror, Error or Refuge. Forests in Western LiteratureDocumento21 páginasAddison, Catherine - Terror, Error or Refuge. Forests in Western LiteraturelizardoselvadekAinda não há avaliações
- The Heckman Correction: An Introduction: Jimmy Jin July 22, 2016Documento4 páginasThe Heckman Correction: An Introduction: Jimmy Jin July 22, 2016aaditya01Ainda não há avaliações
- ShakespeareDocumento12 páginasShakespeareapi-510189551Ainda não há avaliações
- References of Book GEOMETRIC OPTICS - Douglas S - GoodmanDocumento5 páginasReferences of Book GEOMETRIC OPTICS - Douglas S - GoodmanFourit FutureAinda não há avaliações
- Titus Andronicus and PTSDDocumento12 páginasTitus Andronicus and PTSDapi-375917497Ainda não há avaliações
- Why Do People Believe in Conspiracy Theories - Scientific AmericanDocumento4 páginasWhy Do People Believe in Conspiracy Theories - Scientific Americanapi-3285979620% (1)
- Segmentation, Targeting and Positioning For UniversitiesDocumento14 páginasSegmentation, Targeting and Positioning For UniversitiesNazish SohailAinda não há avaliações
- Skenario 4 SGD 23 (English)Documento16 páginasSkenario 4 SGD 23 (English)cokdebagusAinda não há avaliações
- No. 07 A'rafDocumento31 páginasNo. 07 A'rafNafee MahatabAinda não há avaliações
- Creative Talents: Unit 7Documento35 páginasCreative Talents: Unit 7Anna Maria RaleaAinda não há avaliações
- ArtHeritageBook PDFDocumento136 páginasArtHeritageBook PDFramanujankAinda não há avaliações
- HerzbergDocumento16 páginasHerzbergIrish IsipAinda não há avaliações
- President Manuel Quezon SpeechDocumento1 páginaPresident Manuel Quezon SpeechJhomarie De LeonAinda não há avaliações
- 0010 - People vs. Agpangan 79 Phil. 334, October 10, 1947 PDFDocumento7 páginas0010 - People vs. Agpangan 79 Phil. 334, October 10, 1947 PDFGra syaAinda não há avaliações
- Cheat Sheet Character Creation Rouge TraderDocumento11 páginasCheat Sheet Character Creation Rouge TraderOscar SmithAinda não há avaliações
- Physics Extended EssayDocumento6 páginasPhysics Extended EssayBesnikAinda não há avaliações
- Saras Rubric ProductDocumento4 páginasSaras Rubric Productapi-311939141Ainda não há avaliações
- Quotes From The Teachings of Gurdjieff Week One-1Documento43 páginasQuotes From The Teachings of Gurdjieff Week One-1volonterneboja100% (3)
- Decision Making ProcessDocumento11 páginasDecision Making ProcessLakshayAinda não há avaliações
- Balloon Car Contest PortfolioDocumento7 páginasBalloon Car Contest Portfolioapi-372765804Ainda não há avaliações
- Theory of RelativityDocumento51 páginasTheory of RelativityZiaTurk0% (1)
- Atheism On The HorizonDocumento63 páginasAtheism On The HorizonD'Argo Endymion AgathonAinda não há avaliações
- Visual Perception of Architecture Cultural Studies EssayDocumento6 páginasVisual Perception of Architecture Cultural Studies EssayAureliaDewiAinda não há avaliações