Você também pode gostar
- Auto-Tuning Control Using Ziegler-NicholsDocumento5 páginasAuto-Tuning Control Using Ziegler-NicholsValerian PopescuAinda não há avaliações
- A Simple PID Controller With Adaptive Parameter in A DsPICDocumento5 páginasA Simple PID Controller With Adaptive Parameter in A DsPICAlfian Apin Ma'arifAinda não há avaliações
- VFD Fault DetectionDocumento7 páginasVFD Fault DetectionEmmanuel S SombilonAinda não há avaliações
- PID Tuning Classical Methods GuideDocumento10 páginasPID Tuning Classical Methods GuideTolga DurudoganAinda não há avaliações
- 3500 92 Communication Gateway Module Operation and MaintenanDocumento106 páginas3500 92 Communication Gateway Module Operation and Maintenanarturo neiraAinda não há avaliações
- A Flooded Screw ChillerDocumento29 páginasA Flooded Screw ChillerDiêm Công Việt100% (3)
- Boiler-Tuning Basics, Part II PDFDocumento12 páginasBoiler-Tuning Basics, Part II PDFIain NeillAinda não há avaliações
- Digital Excitation SystemDocumento9 páginasDigital Excitation SystemMauricio GuanellaAinda não há avaliações
- 8011 - Phase and Sign Conventions For Energy MetersDocumento2 páginas8011 - Phase and Sign Conventions For Energy MetersAnonymous kuSnz0kl1Ainda não há avaliações
- Abb ActuatorDocumento160 páginasAbb ActuatorSayak GhoshAinda não há avaliações
- EL-O-MATIC Brch-EngDocumento24 páginasEL-O-MATIC Brch-EngLadysAmaris100% (1)
- Grounding ABCDDocumento8 páginasGrounding ABCDdipenkhandhediyaAinda não há avaliações
- S7 1200 ManualDocumento348 páginasS7 1200 ManualVlada MilosevicAinda não há avaliações
- Literature Review Harmonics AnalysisDocumento3 páginasLiterature Review Harmonics AnalysisAmirul AshraffAinda não há avaliações
- Rajdhani Power Supply & Load DetailsDocumento32 páginasRajdhani Power Supply & Load DetailsDeepak GehlotAinda não há avaliações
- Application of Static Excitation SysDocumento34 páginasApplication of Static Excitation SysJay So HanAinda não há avaliações
- Induction Motors - Modelling and ControlDocumento558 páginasInduction Motors - Modelling and ControlCesar CarácterAinda não há avaliações
- Siemens 3TF ContactorsDocumento15 páginasSiemens 3TF ContactorsDavid tangkelangiAinda não há avaliações
- A Tutorial On Cascade Control - Control NotesDocumento5 páginasA Tutorial On Cascade Control - Control Notesaprk_paulrajAinda não há avaliações
- What Is Partial Discharge Testing - Vertiv InsightsDocumento5 páginasWhat Is Partial Discharge Testing - Vertiv InsightsAlexander WijesooriyaAinda não há avaliações
- BA BT300 DLT1201 13 aEN 009Documento188 páginasBA BT300 DLT1201 13 aEN 009Teddy HariyantoAinda não há avaliações
- Advances in Motor Torque Control PDFDocumento122 páginasAdvances in Motor Torque Control PDFTasos PoteasAinda não há avaliações
- 1 Upfc ContentsDocumento4 páginas1 Upfc ContentsRafat ThongAinda não há avaliações
- Pid Good Tuning A Pocket GuideDocumento120 páginasPid Good Tuning A Pocket GuideHeidi HillAinda não há avaliações
- Static Exciter RegulatorDocumento24 páginasStatic Exciter RegulatorMauricio GuanellaAinda não há avaliações
- 01 MGC3000speed Governor User Manual PDFDocumento180 páginas01 MGC3000speed Governor User Manual PDFChee NguyenAinda não há avaliações
- VinayDocumento28 páginasVinayyugendraraoknAinda não há avaliações
- EI6002-Power Plant InstrumentationDocumento7 páginasEI6002-Power Plant Instrumentationgdreddy25Ainda não há avaliações
- Flame Monitoring SystemDocumento33 páginasFlame Monitoring SystemOceman1Ainda não há avaliações
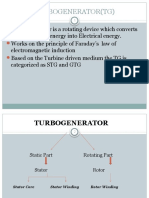
- Electrical Testing On Turbogenerator (TG2Documento40 páginasElectrical Testing On Turbogenerator (TG2rkcAinda não há avaliações
- Variable Frequency Drive : Ravikumar .M M.Tech 3 SEM C.A.I.DDocumento22 páginasVariable Frequency Drive : Ravikumar .M M.Tech 3 SEM C.A.I.Davi013Ainda não há avaliações
- Control of Heat Recovery Steam GeneratorDocumento5 páginasControl of Heat Recovery Steam Generatordrmsrmurty9473100% (5)
- IFM Speed Relay DD0203 Data SheetDocumento2 páginasIFM Speed Relay DD0203 Data SheetRaymund GatocAinda não há avaliações
- Governing of Turbine HydraulicDocumento3 páginasGoverning of Turbine HydraulicMike100% (1)
- User Manual: D637-R/D639-R SERIESDocumento138 páginasUser Manual: D637-R/D639-R SERIESStage2 C&I ShiftAinda não há avaliações
- Building Technologies: HVAC ProductsDocumento28 páginasBuilding Technologies: HVAC ProductsDavid'Sh VeraAinda não há avaliações
- Control Loops PDFDocumento48 páginasControl Loops PDFAnonymous PTHwJyinsAinda não há avaliações
- Brushless Excitation SystemDocumento27 páginasBrushless Excitation SystemSam100% (2)
- RIO600 PG 757487 ENfDocumento36 páginasRIO600 PG 757487 ENfZeckrey JikurunAinda não há avaliações
- Thrust and Differential Expansion Measurements: Operation and Maintenance ManualDocumento46 páginasThrust and Differential Expansion Measurements: Operation and Maintenance ManualRabah AmidiAinda não há avaliações
- MHI DEH Governor for Stable Steam Turbine OperationDocumento2 páginasMHI DEH Governor for Stable Steam Turbine Operationhamidkatebi100% (1)
- D 633 Series Valves eDocumento16 páginasD 633 Series Valves ehaggAinda não há avaliações
- KNX Secure EN PDFDocumento24 páginasKNX Secure EN PDFWamba Gotico LeonAinda não há avaliações
- Single Phase Automatic Voltage Regulator DesignDocumento9 páginasSingle Phase Automatic Voltage Regulator DesignPeter JordanAinda não há avaliações
- Chapter 15Documento40 páginasChapter 15ovidiu_blnAinda não há avaliações
- SMB Series Catalogur PDFDocumento106 páginasSMB Series Catalogur PDFSatish KumarAinda não há avaliações
- Design of VFD Drive For AC MotorDocumento8 páginasDesign of VFD Drive For AC MotorralphholingsheadAinda não há avaliações
- AGN 022 - Conditions For Parallel Operation: SynchronisationDocumento6 páginasAGN 022 - Conditions For Parallel Operation: SynchronisationQuang PhamAinda não há avaliações
- DC Power Systems HandbookDocumento141 páginasDC Power Systems Handbookcharleselitb92100% (1)
- Emergency trip system overviewDocumento22 páginasEmergency trip system overviewBui Vanluong100% (1)
- Opal Generator Annunciator - Turbine V1 - Rev CDocumento35 páginasOpal Generator Annunciator - Turbine V1 - Rev CRaj ChavanAinda não há avaliações
- 228 Power System ProtectionDocumento2 páginas228 Power System ProtectionRamesh Prajapat100% (1)
- Static Excitation System Stage-I. 2docDocumento28 páginasStatic Excitation System Stage-I. 2docraghavendran raghu100% (1)
- Tsi FinalDocumento41 páginasTsi FinalAnand KumarAinda não há avaliações
- DECS 200 ManualDocumento184 páginasDECS 200 ManualCristina ParedesAinda não há avaliações
- Imsed01 & Imset01Documento146 páginasImsed01 & Imset01Dang Jinlong100% (1)
- Variable Speed DrivesDocumento44 páginasVariable Speed Drivesmnt6176100% (2)
- Ebara Flow Switch Controlled Booster System-20100212101823 - TD - UdDocumento25 páginasEbara Flow Switch Controlled Booster System-20100212101823 - TD - Udriadazem2119Ainda não há avaliações
- Distributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981No EverandDistributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981Ainda não há avaliações
- (SAC, BIC, XOR, LAT, AWD) On Some Cryptographic Properties of Rijndael (Yucel)Documento12 páginas(SAC, BIC, XOR, LAT, AWD) On Some Cryptographic Properties of Rijndael (Yucel)Alsita Putri IrianaAinda não há avaliações
- 489-F Latest JudgmentDocumento15 páginas489-F Latest JudgmentMoving StepAinda não há avaliações
- Preparation Total Consecration PDFDocumento872 páginasPreparation Total Consecration PDFgbarcelonAinda não há avaliações
- 477382Documento797 páginas477382PradipGhandiAinda não há avaliações
- English Language (1122)Documento26 páginasEnglish Language (1122)TD X Mzinda100% (1)
- AEF3 File4 TestADocumento5 páginasAEF3 File4 TestAdaniel-XIIAinda não há avaliações
- Watch Blow Fly Arrang e Sleep Go Cook Clean Hear Cut Give Fall Open See Listen Carry Visit Buy Bring Write Bake Make Sit Play DrawDocumento3 páginasWatch Blow Fly Arrang e Sleep Go Cook Clean Hear Cut Give Fall Open See Listen Carry Visit Buy Bring Write Bake Make Sit Play DrawEmily NytAinda não há avaliações
- Chapter-1 of F.mensurationDocumento8 páginasChapter-1 of F.mensurationpradeeppoddarAinda não há avaliações
- Informative Speech 2010 (Speaking Outline) 2Documento5 páginasInformative Speech 2010 (Speaking Outline) 2FaranzaSynsAinda não há avaliações
- A Study on Student Budgeting HabitsDocumento41 páginasA Study on Student Budgeting Habitsbornak BonalasAinda não há avaliações
- Week4.pdf 82849 1 1583836882000 PDFDocumento17 páginasWeek4.pdf 82849 1 1583836882000 PDFsssmmm8Ainda não há avaliações
- PAG 03.1 - Determination of ResistivityDocumento3 páginasPAG 03.1 - Determination of ResistivityjmsonlAinda não há avaliações
- IvanhoeDocumento17 páginasIvanhoeRob Collins100% (4)
- Philippine Idea FileDocumento64 páginasPhilippine Idea FileJerica TamayoAinda não há avaliações
- Shukr Thankfulness To Allah Grade 12Documento21 páginasShukr Thankfulness To Allah Grade 12Salman Mohammed AbdullahAinda não há avaliações
- Motivation and Frustration: Understanding the Causes and Types of ConflictDocumento6 páginasMotivation and Frustration: Understanding the Causes and Types of ConflictKamlakar Sadavarte100% (1)
- Health Concerns of Middle-Aged Men in a Philippine JailDocumento88 páginasHealth Concerns of Middle-Aged Men in a Philippine JailJelloEslaoAinda não há avaliações
- MTH 204Documento6 páginasMTH 204Sahil ChopraAinda não há avaliações
- BSIA - Access ControlDocumento16 páginasBSIA - Access ControlSayed HashemAinda não há avaliações
- Georgethirdearlo 00 WilluoftDocumento396 páginasGeorgethirdearlo 00 WilluoftEric ThierryAinda não há avaliações
- Central Venous Access Devices (Cvads) andDocumento68 páginasCentral Venous Access Devices (Cvads) andFitri ShabrinaAinda não há avaliações
- ABC Pre School: (Please Refer Advertisement in This Section)Documento5 páginasABC Pre School: (Please Refer Advertisement in This Section)hemacrcAinda não há avaliações
- Animal BitesDocumento48 páginasAnimal BitesJalouis GabalfinAinda não há avaliações
- Process Costing: © 2016 Pearson Education LTDDocumento47 páginasProcess Costing: © 2016 Pearson Education LTDAshish ShresthaAinda não há avaliações
- Reduction in Left Ventricular Hypertrophy in Hypertensive Patients Treated With Enalapril, Losartan or The Combination of Enalapril and LosartanDocumento7 páginasReduction in Left Ventricular Hypertrophy in Hypertensive Patients Treated With Enalapril, Losartan or The Combination of Enalapril and LosartanDiana De La CruzAinda não há avaliações
- CRCT Probe 2011Documento300 páginasCRCT Probe 2011huffpostAinda não há avaliações
- Practices For Improving The PCBDocumento35 páginasPractices For Improving The PCBmwuestAinda não há avaliações
- Shero Shayari by GhalibDocumento65 páginasShero Shayari by GhalibEngr Muhammad Shafeeq NaqeebiAinda não há avaliações
- PALS - Bar Ops Corporation Law Must Read CasesDocumento70 páginasPALS - Bar Ops Corporation Law Must Read CasesOnat PAinda não há avaliações
- 00 HR Analytics 2018Documento40 páginas00 HR Analytics 2018Aalya ModiAinda não há avaliações