Você também pode gostar
- Dual Cell HSDPA Application PerformanceDocumento1 páginaDual Cell HSDPA Application PerformancesujanAinda não há avaliações
- Chaos Based Fragile Watermarking Algorithm For JPEG ImagesDocumento1 páginaChaos Based Fragile Watermarking Algorithm For JPEG ImagessujanAinda não há avaliações
- Smith Predictive Model: Abstract-In Real Applications, A Remote Control System Is Generally An Integration ofDocumento1 páginaSmith Predictive Model: Abstract-In Real Applications, A Remote Control System Is Generally An Integration ofsujanAinda não há avaliações
- Extraction Text From Video SequencesDocumento1 páginaExtraction Text From Video SequencessujanAinda não há avaliações
- Smith Predictive Model: Abstract-In Real Applications, A Remote Control System Is Generally An Integration ofDocumento1 páginaSmith Predictive Model: Abstract-In Real Applications, A Remote Control System Is Generally An Integration ofsujanAinda não há avaliações
- Channel Estimation For OFDM System With Two Training Symbols Aided and Polynomial FittingDocumento1 páginaChannel Estimation For OFDM System With Two Training Symbols Aided and Polynomial FittingsujanAinda não há avaliações
- STATCOM-Based Indirect Torque Control of Induction Machines During Voltage Recovery After Grid FaultsDocumento1 páginaSTATCOM-Based Indirect Torque Control of Induction Machines During Voltage Recovery After Grid FaultssujanAinda não há avaliações
- Impact of Distribution System Quality On DG Interconnection ProtectionDocumento1 páginaImpact of Distribution System Quality On DG Interconnection ProtectionsujanAinda não há avaliações
- STATCOM-Based Indirect Torque Control of Induction Machines During Voltage Recovery After Grid FaultsDocumento1 páginaSTATCOM-Based Indirect Torque Control of Induction Machines During Voltage Recovery After Grid FaultssujanAinda não há avaliações
- New Microsoft OfSimulation of Power System Stabilizers Fice Word DocumentDocumento1 páginaNew Microsoft OfSimulation of Power System Stabilizers Fice Word DocumentsujanAinda não há avaliações
- A Novel Sliding Mode Control For BLDC Motor Network Control SystemDocumento1 páginaA Novel Sliding Mode Control For BLDC Motor Network Control SystemsujanAinda não há avaliações
- Abstract For Combined DWT-DCT Digital Image WatermarkingDocumento1 páginaAbstract For Combined DWT-DCT Digital Image WatermarkingsujanAinda não há avaliações
- New MiA Novel Control Technique For A Switched-Capacitor-Converter-Based Hybrid Electric Vehicle Energy Storage Systemcrosoft Office Word DocumentDocumento1 páginaNew MiA Novel Control Technique For A Switched-Capacitor-Converter-Based Hybrid Electric Vehicle Energy Storage Systemcrosoft Office Word DocumentsujanAinda não há avaliações
- Abstract For .Adaptive Techniques For Multi-User OFDMDocumento3 páginasAbstract For .Adaptive Techniques For Multi-User OFDMsujanAinda não há avaliações
- Abstract For PCA and Lda Based Face Ion SystemDocumento1 páginaAbstract For PCA and Lda Based Face Ion SystemsujanAinda não há avaliações
- Matlab DSP Dip Communication ProjectsDocumento1 páginaMatlab DSP Dip Communication ProjectssujanAinda não há avaliações
- Abstrcat For Modeling of A PWM VSI Induction Motor DriveDocumento1 páginaAbstrcat For Modeling of A PWM VSI Induction Motor DrivesujanAinda não há avaliações
- Eee Proj List11Documento3 páginasEee Proj List11sujanAinda não há avaliações
- L Asymmetric PWM Modulation Based Three Phase Inverter.Documento1 páginaL Asymmetric PWM Modulation Based Three Phase Inverter.sujanAinda não há avaliações
- Vlsi Projects On Verilog and VHDLDocumento3 páginasVlsi Projects On Verilog and VHDLsujan100% (1)
- Abstrcat For Modeling of A PWM VSI Induction Motor DriveDocumento1 páginaAbstrcat For Modeling of A PWM VSI Induction Motor DrivesujanAinda não há avaliações
- Matlab DSP Dip Communication ProjectsDocumento9 páginasMatlab DSP Dip Communication ProjectssujanAinda não há avaliações
- UARTDocumento6 páginasUARTsujanAinda não há avaliações
- Bills PpunitDocumento20 páginasBills PpunitsujanAinda não há avaliações
- A Configurable Motion Estimation Architecture For Block Matching AlgorithmsDocumento11 páginasA Configurable Motion Estimation Architecture For Block Matching AlgorithmssujanAinda não há avaliações
- Modeling Digital Systems: © Sudhakar Yalamanchili, Georgia Institute of Technology, 2006Documento19 páginasModeling Digital Systems: © Sudhakar Yalamanchili, Georgia Institute of Technology, 2006mahendra singhAinda não há avaliações
- Job Description KnoahDocumento2 páginasJob Description KnoahsujanAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- LTE For M-LMS 900 MHZ For Intelligent Transportation Systems. N.D. Tripathi. Aug 2012.Documento36 páginasLTE For M-LMS 900 MHZ For Intelligent Transportation Systems. N.D. Tripathi. Aug 2012.Skybridge Spectrum FoundationAinda não há avaliações
- Seminar On PolyfuseDocumento25 páginasSeminar On PolyfuseLemi Hussain50% (2)
- Tetrode: GeneralDocumento5 páginasTetrode: GeneralAlejandroAinda não há avaliações
- Lecture 4 2022 FinalDocumento39 páginasLecture 4 2022 FinalKenedy GreysonAinda não há avaliações
- Density Based Traffic Control System.: Electrical EngineeringDocumento41 páginasDensity Based Traffic Control System.: Electrical Engineeringvijay shindeAinda não há avaliações
- mp4 FileDocumento2 páginasmp4 FileSharon MorganAinda não há avaliações
- Project Proposal: Wireless Mobile ChargerDocumento13 páginasProject Proposal: Wireless Mobile ChargerJerin TasnimAinda não há avaliações
- PDFDocumento28 páginasPDFMiraAinda não há avaliações
- MicrowaveDocumento3 páginasMicrowavetamAinda não há avaliações
- Philips AA5 AADocumento6 páginasPhilips AA5 AAКрасимир_КостадиновAinda não há avaliações
- Technical SpecificationsDocumento7 páginasTechnical SpecificationsElla MariaAinda não há avaliações
- Large Signal Amp-unit-IV NotesDocumento19 páginasLarge Signal Amp-unit-IV NotesNagamani VAinda não há avaliações
- 3625f-High Efficiency 2-Cell Supercap ChargerDocumento16 páginas3625f-High Efficiency 2-Cell Supercap ChargernevdullAinda não há avaliações
- Chapter 8Documento7 páginasChapter 8Salvador FayssalAinda não há avaliações
- SCXI Chassis: Heading NI SCXI-1000, NI SCXI-1000DC, NI SCXI-1001Documento3 páginasSCXI Chassis: Heading NI SCXI-1000, NI SCXI-1000DC, NI SCXI-1001hariya03240681Ainda não há avaliações
- Sinusoidal AC Circuit MeasurementsDocumento17 páginasSinusoidal AC Circuit MeasurementsComputer Guru100% (4)
- Three Phase Transformer Connections PDFDocumento4 páginasThree Phase Transformer Connections PDFhelen tsegayAinda não há avaliações
- Transmission and Distribution Module2Documento3 páginasTransmission and Distribution Module2Susmita PandaAinda não há avaliações
- PFC Rectifier Technology STATRON 11 15 ENDocumento5 páginasPFC Rectifier Technology STATRON 11 15 ENpatilshailesh123Ainda não há avaliações
- Manual Udian AL 7021Documento6 páginasManual Udian AL 7021Vasudha SharmaAinda não há avaliações
- Projects List - 1271 Raspberry PI ProjectsDocumento47 páginasProjects List - 1271 Raspberry PI ProjectsAshrafAinda não há avaliações
- GPS Interface - Interfacing GPS With AVR Microcontroller (Atmega16)Documento13 páginasGPS Interface - Interfacing GPS With AVR Microcontroller (Atmega16)Chittaranjan BaralAinda não há avaliações
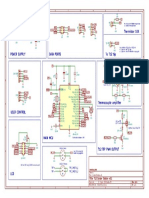
- Thermistor 10K: Tip+ Tip-Tip - Check - 1 Tip - Check - 2Documento1 páginaThermistor 10K: Tip+ Tip-Tip - Check - 1 Tip - Check - 2darioAinda não há avaliações
- ECNG 3016 Advanced Digital Electronics: Eneral NformationDocumento11 páginasECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon Boucaud100% (1)
- Power Transformer Inrush Current Detection & Harmonic Sharing in Differential Relay ProtectionDocumento6 páginasPower Transformer Inrush Current Detection & Harmonic Sharing in Differential Relay ProtectionasrinivasareddyAinda não há avaliações
- DPC 5 Gen3 Manual v1.00dDocumento26 páginasDPC 5 Gen3 Manual v1.00dalanbecerraAinda não há avaliações
- Intro To Data CommDocumento4 páginasIntro To Data CommChinchay GuintoAinda não há avaliações
- t4300 Load SharerDocumento4 páginast4300 Load SharerndukAinda não há avaliações
- DVC Woofers ManDocumento18 páginasDVC Woofers ManJorge Luiz EstrellaAinda não há avaliações
- AQZ102 NaisDocumento6 páginasAQZ102 NaishüseyinAinda não há avaliações