Você também pode gostar
- LK315T3LA57Documento24 páginasLK315T3LA57Repararelcd Lcd0% (1)
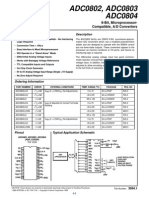
- Adc 0804Documento41 páginasAdc 0804AndySilvandAinda não há avaliações
- Abb Ag: OperationDocumento6 páginasAbb Ag: OperationNajamUSSaqibNadeem100% (1)
- Instruction Manual MODEL 2017-03A Up/DownconverterDocumento17 páginasInstruction Manual MODEL 2017-03A Up/Downconverterch2231Ainda não há avaliações
- Tda7317 EcualizadorDocumento13 páginasTda7317 EcualizadorRafael AlcazarAinda não há avaliações
- DInverter B To Commander SEDocumento18 páginasDInverter B To Commander SEDave CárdenasAinda não há avaliações
- HJ1602A DatasheetDocumento11 páginasHJ1602A DatasheetsunthomaAinda não há avaliações
- Tda 7339Documento12 páginasTda 7339Giovanni Carrillo VillegasAinda não há avaliações
- TDA7442Documento16 páginasTDA7442gaston30-3@Ainda não há avaliações
- Adc 0808Documento14 páginasAdc 0808Vikas PatelAinda não há avaliações
- Adm1602k Nsa Fbs 3.3vDocumento22 páginasAdm1602k Nsa Fbs 3.3vHer ManTokAinda não há avaliações
- LMC-SSC2E16-01 Serial: User ManualDocumento12 páginasLMC-SSC2E16-01 Serial: User ManualFred ShihAinda não há avaliações
- Datasheet LCD 128x64 ATM12864DDocumento21 páginasDatasheet LCD 128x64 ATM12864DRafael MendozaAinda não há avaliações
- Carlo Gavazzi Wm12 Communications ManualDocumento13 páginasCarlo Gavazzi Wm12 Communications Manualthekiller6996Ainda não há avaliações
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocumento18 páginasADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesMarco MenezesAinda não há avaliações
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocumento17 páginasADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesJorge Luis Castillo GuarachiAinda não há avaliações
- HMICnnection DeltaDocumento136 páginasHMICnnection DeltaramdarkmasterAinda não há avaliações
- ADC0809CCNDocumento16 páginasADC0809CCNFrancesca Castelar BenalcazarAinda não há avaliações
- Serial Communication Rs 232 With Batch FileDocumento5 páginasSerial Communication Rs 232 With Batch FileKaja Mohiuddeen100% (2)
- CB900K e 0203Documento73 páginasCB900K e 0203Vuong NguyenAinda não há avaliações
- G12864C LCD Module ManualDocumento13 páginasG12864C LCD Module Manualsigit jokoAinda não há avaliações
- 3EJ4 Set 07 Mixed Signal MJDDocumento45 páginas3EJ4 Set 07 Mixed Signal MJDSoroush AkAinda não há avaliações
- Agm 0070WTDocumento27 páginasAgm 0070WTbrandt_br7991Ainda não há avaliações
- μP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerDocumento16 páginasμP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerKasi ChinnaAinda não há avaliações
- Graphic Display AGM-12864A-801Documento15 páginasGraphic Display AGM-12864A-801Anonymous nMZN9dJvaZAinda não há avaliações
- DatasheetDocumento248 páginasDatasheetRajesh MauryaAinda não há avaliações
- Galil Cds3310 CatalogDocumento5 páginasGalil Cds3310 CatalogElectromateAinda não há avaliações
- Tda 7440Documento17 páginasTda 7440Albert ThomasAinda não há avaliações
- μP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerDocumento16 páginasμP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerKudo ShinichiAinda não há avaliações
- DOP HM Conexionado Con Otros PLCsDocumento136 páginasDOP HM Conexionado Con Otros PLCsMarcio MifaroAinda não há avaliações
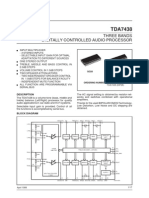
- Tda 7438Documento18 páginasTda 7438sontuyet82Ainda não há avaliações
- MCP3901Documento62 páginasMCP3901oxobfeAinda não há avaliações
- AMC2002C DatasheetDocumento22 páginasAMC2002C DatasheetAda CsabaAinda não há avaliações
- ARM InstructionsDocumento6 páginasARM InstructionsSteven AstorgaAinda não há avaliações
- ADC0802, ADC0803 ADC0804: Features DescriptionDocumento17 páginasADC0802, ADC0803 ADC0804: Features DescriptionSuryananda PadmadinataAinda não há avaliações
- Hoja de Datos Del TDA 7439Documento20 páginasHoja de Datos Del TDA 7439_el_patriarca_Ainda não há avaliações
- Folding ADCs ADIDocumento12 páginasFolding ADCs ADINishit Shah100% (1)
- Example of Power Supply: Normal Temperature Type Extended Temperature TypeDocumento1 páginaExample of Power Supply: Normal Temperature Type Extended Temperature Typerdc02271Ainda não há avaliações
- CA12000202-A Pump Starter With ProfibusDocumento1 páginaCA12000202-A Pump Starter With Profibusnickname12345Ainda não há avaliações
- Quadrature Encoder Receiver Module: An Implementation On FPGADocumento12 páginasQuadrature Encoder Receiver Module: An Implementation On FPGAสหายดิว ลูกพระอาทิตย์Ainda não há avaliações
- Pic 16 F 628Documento20 páginasPic 16 F 628Merényi Oszkár100% (1)
- HCTL 2017Documento12 páginasHCTL 2017ivancho1070Ainda não há avaliações
- Adc Atmega128Documento4 páginasAdc Atmega128M70AB2Ainda não há avaliações
- SR-95 User ManualDocumento18 páginasSR-95 User ManualNikhil DixitAinda não há avaliações
- Tda 7313Documento15 páginasTda 7313jordachadiAinda não há avaliações
- Im Delta Dop SerialDocumento137 páginasIm Delta Dop SerialChina BrownAinda não há avaliações
- LCD - GDM1602BDocumento10 páginasLCD - GDM1602BElanio Julio100% (1)
- ADC0808Documento15 páginasADC0808Ketan SalviAinda não há avaliações
- AC Servo System: SDA Series 100W 3.5KWDocumento22 páginasAC Servo System: SDA Series 100W 3.5KWSunil Kumar YelisettyAinda não há avaliações
- VICIDocumento6 páginasVICIhaoAinda não há avaliações
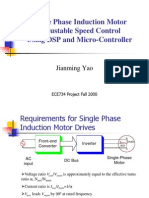
- Single Phase Induction Motor Adjustable Speed Control Using DSP and Micro-ControllerDocumento11 páginasSingle Phase Induction Motor Adjustable Speed Control Using DSP and Micro-ControllerRajan GuptaAinda não há avaliações
- GM16C550Documento23 páginasGM16C550kranti06Ainda não há avaliações
- LK370D3LZ33Documento31 páginasLK370D3LZ33Fly KuAinda não há avaliações
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkAinda não há avaliações
- Power Systems-On-Chip: Practical Aspects of DesignNo EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Variable Speed AC Drives with Inverter Output FiltersNo EverandVariable Speed AC Drives with Inverter Output FiltersAinda não há avaliações
- Delta VocabDocumento11 páginasDelta VocabJoshi ThomasAinda não há avaliações
- Types of Managerial Communication 1Documento11 páginasTypes of Managerial Communication 1chris annAinda não há avaliações
- Dokumen - Tips - Telecommunication For High Rise Building PresentationDocumento50 páginasDokumen - Tips - Telecommunication For High Rise Building PresentationKayzha Shafira Ramadhani460 105Ainda não há avaliações
- 2 IIMM Business Communication (PGDMM-PGDSCM&L)Documento220 páginas2 IIMM Business Communication (PGDMM-PGDSCM&L)Shubham waghmareAinda não há avaliações
- Lesson Plan: Step Activity/Description Material Interaction & Duration Anticipated Problems/Solutions You StudentsDocumento4 páginasLesson Plan: Step Activity/Description Material Interaction & Duration Anticipated Problems/Solutions You StudentsLaurianne SilvaAinda não há avaliações
- Entrepreneurial MarketingDocumento22 páginasEntrepreneurial Marketingkehibif789Ainda não há avaliações
- Morphological BorrowingDocumento14 páginasMorphological BorrowingIrfan Andi SuhadaAinda não há avaliações
- Grade 6 DLL MAPEH Q4 Week 3Documento2 páginasGrade 6 DLL MAPEH Q4 Week 3rudy erebiasAinda não há avaliações
- CH 4 Network SecurityDocumento37 páginasCH 4 Network SecurityHirko GemechuAinda não há avaliações
- LTE Site Solutions OverviewDocumento94 páginasLTE Site Solutions OverviewArghyaPodderAinda não há avaliações
- OELP - District Program Manager - JDDocumento5 páginasOELP - District Program Manager - JDManish MeenaAinda não há avaliações
- Lesson Plan 1Documento3 páginasLesson Plan 1api-303131522Ainda não há avaliações
- Seminar 4 & 5 - TelecomsDocumento81 páginasSeminar 4 & 5 - TelecomsGible BubuAinda não há avaliações
- Speaking Assessment Criteria: CEFR C1Documento1 páginaSpeaking Assessment Criteria: CEFR C1GERESAinda não há avaliações
- Eng RPH 3N, 4M, 5M, 6M (Kogi) 3112020Documento4 páginasEng RPH 3N, 4M, 5M, 6M (Kogi) 3112020MKogiAinda não há avaliações
- Code 1Documento5 páginasCode 1emuye bawokeAinda não há avaliações
- The Violation of Conversational Maxims Found in PDFDocumento7 páginasThe Violation of Conversational Maxims Found in PDFAndyAinda não há avaliações
- Lesson PlanDocumento3 páginasLesson PlanRed LavaAinda não há avaliações
- Chapter 6 ONLINE PLATFORMS FOR ICT CONTENT DEVELOPMENTDocumento6 páginasChapter 6 ONLINE PLATFORMS FOR ICT CONTENT DEVELOPMENTSyrill Cayetano100% (1)
- Student Teaching Experience (Portfolio)Documento100 páginasStudent Teaching Experience (Portfolio)Yulanda Mae ChaiAinda não há avaliações
- Arturo Villalobos ResumeDocumento1 páginaArturo Villalobos ResumeCarlos Arturo VillalobosAinda não há avaliações
- ALS Rules On PlagiarismDocumento7 páginasALS Rules On PlagiarismssAinda não há avaliações
- Critical Reading Strategies PDFDocumento2 páginasCritical Reading Strategies PDFRosha SoberanoAinda não há avaliações
- Cos2626 2014 TL 102 2 BDocumento7 páginasCos2626 2014 TL 102 2 BbibiveeAinda não há avaliações
- School ScheduleDocumento2 páginasSchool Scheduleapi-286549827Ainda não há avaliações
- IEEE Citation Style GuideDocumento3 páginasIEEE Citation Style GuideNalaka HewapathiranaAinda não há avaliações
- The Conjunction Analysis in David Beckham Speech: Vicky Rahmat Tanjung, SudiyonoDocumento7 páginasThe Conjunction Analysis in David Beckham Speech: Vicky Rahmat Tanjung, Sudiyonofirdaus adrAinda não há avaliações
- Sto. Rosario Sapang Palay College, Inc.: Prepared by Mr. Simeon Lorenzo D. MoralesDocumento4 páginasSto. Rosario Sapang Palay College, Inc.: Prepared by Mr. Simeon Lorenzo D. Moralesabner m cruzAinda não há avaliações
- Sample Permission Letter - Use of Material in A ThesisDocumento2 páginasSample Permission Letter - Use of Material in A ThesisColleen Dejan100% (1)
- Intro To Lingusitics PDFDocumento51 páginasIntro To Lingusitics PDFTootsie Misa Sanchez100% (2)