Você também pode gostar
- Fulltext 5Documento9 páginasFulltext 5Van NguyenAinda não há avaliações
- FEA Assignment - Lucas Dos Santos Almeida p13175018Documento19 páginasFEA Assignment - Lucas Dos Santos Almeida p13175018Lucas AlmeidaAinda não há avaliações
- Review For Unit 3 - Chapter 3 Part 2: Sin Xisthesameas (Sinx) Know The Unit Circle!!Documento16 páginasReview For Unit 3 - Chapter 3 Part 2: Sin Xisthesameas (Sinx) Know The Unit Circle!!Ian StantonAinda não há avaliações
- MATLAB Lecture 8. Special Matrices in MATLABDocumento4 páginasMATLAB Lecture 8. Special Matrices in MATLAByclAinda não há avaliações
- Indian Institute of Technology Delhi: Mcp746 NVHDocumento15 páginasIndian Institute of Technology Delhi: Mcp746 NVHMohit KumarAinda não há avaliações
- FDMcodeDocumento9 páginasFDMcodemixigaliAinda não há avaliações
- EE-322L ADC Lab-3Documento5 páginasEE-322L ADC Lab-3Hassan TariqAinda não há avaliações
- Lecture2013 04 25Documento4 páginasLecture2013 04 25pikachu_latias_latiosAinda não há avaliações
- FDMcodeDocumento9 páginasFDMcodeSand ShuklaAinda não há avaliações
- MATLAB Lecture 8. Special Matrices in MATLABDocumento4 páginasMATLAB Lecture 8. Special Matrices in MATLAByisayeAinda não há avaliações
- Basics of FEM: Prof. S. V. KulkarniDocumento28 páginasBasics of FEM: Prof. S. V. KulkarniKiran Kumar KandregulaAinda não há avaliações
- The Advanced Encryption Standard (AES)Documento55 páginasThe Advanced Encryption Standard (AES)pathmakerpkAinda não há avaliações
- Programming Exercises For R: by Nastasiya F. Grinberg & Robin J. ReedDocumento35 páginasProgramming Exercises For R: by Nastasiya F. Grinberg & Robin J. ReedElena50% (2)
- JVilardy Paper2 5CNIFDocumento7 páginasJVilardy Paper2 5CNIFcarlosj114Ainda não há avaliações
- Fig. 3.2.1 Finite Element Mesh Consisting of Triangular and Rectangular ElementDocumento9 páginasFig. 3.2.1 Finite Element Mesh Consisting of Triangular and Rectangular Elementsrinadh1602Ainda não há avaliações
- PST 3dplotDocumento70 páginasPST 3dplotIldeberto de los SantosAinda não há avaliações
- MTH10007 Notes s1-2015Documento208 páginasMTH10007 Notes s1-2015Dylan Ngu Tung Hong0% (1)
- Section 2 4Documento4 páginasSection 2 4api-294440065Ainda não há avaliações
- Chapter 2: Integration: 2.1 The General Integration or Antiderivative of A FunctionDocumento11 páginasChapter 2: Integration: 2.1 The General Integration or Antiderivative of A Functionahlam_1995Ainda não há avaliações
- A Robust and Efficient Scheme For Image Encryption-DecryptionDocumento5 páginasA Robust and Efficient Scheme For Image Encryption-DecryptionInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- Lab2 - Task2 - Sultan Momar Alshalabi - 422039543Documento8 páginasLab2 - Task2 - Sultan Momar Alshalabi - 422039543Sultan MohamedAinda não há avaliações
- Subpixel Edge Detection Based On Morphological Theory: Yu Lei and Nie JiafaDocumento4 páginasSubpixel Edge Detection Based On Morphological Theory: Yu Lei and Nie JiafarphmiAinda não há avaliações
- Performance of The Finite Strip Method For Structural Analysis On A Parallel ComputerDocumento14 páginasPerformance of The Finite Strip Method For Structural Analysis On A Parallel ComputerFabio OkamotoAinda não há avaliações
- MS3200 Anum Part 2Documento47 páginasMS3200 Anum Part 2Angga HermawanAinda não há avaliações
- Geometric Nonlinearity: Chapter NineDocumento27 páginasGeometric Nonlinearity: Chapter NineWeight lossAinda não há avaliações
- 4500ICBTEGDocumento9 páginas4500ICBTEGKalana wickramanayakaAinda não há avaliações
- 2021 QP Pca Test-1Documento1 página2021 QP Pca Test-1Muhammed Ashiq SAinda não há avaliações
- Gpom: 3 ModellingDocumento18 páginasGpom: 3 ModellingAbhishekAinda não há avaliações
- ExercisesDocumento15 páginasExercisesDrRooba HasanAinda não há avaliações
- MTH 103 Assignment 014Documento22 páginasMTH 103 Assignment 014Сара З. ЛорићAinda não há avaliações
- Ee202 Artigo ManaDocumento11 páginasEe202 Artigo ManaludokellypAinda não há avaliações
- Full Text 4Documento17 páginasFull Text 4David BensoussanAinda não há avaliações
- Fast Inverse Square RootDocumento8 páginasFast Inverse Square RootMaxminlevelAinda não há avaliações
- Srno4 - Conti....Documento30 páginasSrno4 - Conti....Bharti VijAinda não há avaliações
- A Step-By-Step Procedure To The Numerical Solution For Time-Dependent Partial Derivative Equations in Three Spatial DimensionsDocumento29 páginasA Step-By-Step Procedure To The Numerical Solution For Time-Dependent Partial Derivative Equations in Three Spatial Dimensionssportcar2000Ainda não há avaliações
- Assignment 3: Trajectory Compression: 2022 Fall EECS205002 Linear Algebra Due: 2022/12/14Documento4 páginasAssignment 3: Trajectory Compression: 2022 Fall EECS205002 Linear Algebra Due: 2022/12/14Samuel DharmaAinda não há avaliações
- Laboratory 3 - Plotting SignalsDocumento14 páginasLaboratory 3 - Plotting SignalsOsama AlqahtaniAinda não há avaliações
- PS2 Lab ManualDocumento37 páginasPS2 Lab ManualFariha shaikhAinda não há avaliações
- Lab2 - Task1 - Sultan Momar Alshalabi - 422039543Documento9 páginasLab2 - Task1 - Sultan Momar Alshalabi - 422039543Sultan MohamedAinda não há avaliações
- GPU Programming EE 4702-1 Take-Home Pre-Final Examination: Name SolutionDocumento19 páginasGPU Programming EE 4702-1 Take-Home Pre-Final Examination: Name SolutionmoienAinda não há avaliações
- Network Coding: Theory and Practice: Apirath Limmanee Jacobs UniversityDocumento18 páginasNetwork Coding: Theory and Practice: Apirath Limmanee Jacobs Universityireene_tjakepAinda não há avaliações
- Computer Graphics (ECS-504) 2011-12-2Documento4 páginasComputer Graphics (ECS-504) 2011-12-2Ajay YadavAinda não há avaliações
- Matrix SummaryDocumento15 páginasMatrix SummaryApam BenjaminAinda não há avaliações
- Kuliah1 2015Documento36 páginasKuliah1 2015wiraAinda não há avaliações
- Gate-Level Minimization: M.ShoaibDocumento61 páginasGate-Level Minimization: M.ShoaibShoaib MushtaqAinda não há avaliações
- Column Generation With GamsDocumento19 páginasColumn Generation With GamsBrayan IbañezAinda não há avaliações
- Maths 2Documento3 páginasMaths 2Phoenix GriffithAinda não há avaliações
- 2.2 A2 2017 Unit 2-2 WS Packet LG PDFDocumento37 páginas2.2 A2 2017 Unit 2-2 WS Packet LG PDFAngelicaAinda não há avaliações
- Make Up Test1 Eng Math 1 1 2011/2012Documento6 páginasMake Up Test1 Eng Math 1 1 2011/2012calliepearsonAinda não há avaliações
- Lecture2013 03 28Documento4 páginasLecture2013 03 28pikachu_latias_latiosAinda não há avaliações
- Old Quesition Papers (III Sem) Dec-13Documento52 páginasOld Quesition Papers (III Sem) Dec-139966197483Ainda não há avaliações
- Fortran 77 Code For SplineDocumento4 páginasFortran 77 Code For Splinesubha_aeroAinda não há avaliações
- Properties of The Ternary Cubic Equation 5x2-3y2 z3Documento6 páginasProperties of The Ternary Cubic Equation 5x2-3y2 z3IJRASETPublicationsAinda não há avaliações
- Advanced Data Mining and Machine Learning: Assignment 3: High Dimensional Data ClusteringDocumento4 páginasAdvanced Data Mining and Machine Learning: Assignment 3: High Dimensional Data ClusteringAnkit MalhotraAinda não há avaliações
- 03 Chapter 3 Differentiation 5oktDocumento38 páginas03 Chapter 3 Differentiation 5oktMohd ShahidAinda não há avaliações
- FEmetDocumento58 páginasFEmetHamed MemarianAinda não há avaliações
- Final 2008 FDocumento18 páginasFinal 2008 FMuhammad MurtazaAinda não há avaliações
- Ordinary Differential Equations II: CHE338 - Lecture#10Documento11 páginasOrdinary Differential Equations II: CHE338 - Lecture#10waleeda34Ainda não há avaliações
- Fourth: AeideirhelnnomDocumento9 páginasFourth: AeideirhelnnomauctmetuAinda não há avaliações
- Parth Valves and Hoses LLP.: Test & Guarantee CertificateDocumento1 páginaParth Valves and Hoses LLP.: Test & Guarantee CertificateSURYAKANTAinda não há avaliações
- The Importance of Subscale Jet Engine TestingDocumento8 páginasThe Importance of Subscale Jet Engine TestingKKayAinda não há avaliações
- ARRI SkyPanel - DMX Protocol Specification V4.4Documento88 páginasARRI SkyPanel - DMX Protocol Specification V4.4Quan LyAinda não há avaliações
- LRT JakproDocumento21 páginasLRT JakproAzzah Auliya Ardindasari100% (1)
- Paper AeroplaneDocumento19 páginasPaper Aeroplanejkb SudhakarAinda não há avaliações
- Fire Protection Design For Healthcare FacilitiesDocumento34 páginasFire Protection Design For Healthcare Facilitiesapi_fabianAinda não há avaliações
- 02-Dr Ooi-Design of Jacked-In Piles & Case Studies in SingaporeDocumento39 páginas02-Dr Ooi-Design of Jacked-In Piles & Case Studies in SingaporefreezefreezeAinda não há avaliações
- Use Case Diagram For Employee Management SystemDocumento60 páginasUse Case Diagram For Employee Management SystemAnant JaiswalAinda não há avaliações
- 1.5SMC Series-1864824 PDFDocumento8 páginas1.5SMC Series-1864824 PDFRizwan RanaAinda não há avaliações
- Activa NewDocumento160 páginasActiva NewSiddharth Jain100% (1)
- CE 411 Lecture 03 - Moment AreaDocumento27 páginasCE 411 Lecture 03 - Moment AreaNophiAinda não há avaliações
- ICON Catalog LocationsDocumento16 páginasICON Catalog LocationsTools StuffsAinda não há avaliações
- Computer SoftwareDocumento3 páginasComputer SoftwareCyrine CalagosAinda não há avaliações
- Sd-1-Parts-Book Manual Propietario SpreaderDocumento30 páginasSd-1-Parts-Book Manual Propietario Spreadergabriel sanchezAinda não há avaliações
- Exterior Perspective 1: PasuquinDocumento1 páginaExterior Perspective 1: Pasuquinjay-ar barangayAinda não há avaliações
- Project Based Lab Report ON Voting Information System: K L UniversityDocumento13 páginasProject Based Lab Report ON Voting Information System: K L UniversitySai Gargeya100% (1)
- Hadron XX ManualDocumento41 páginasHadron XX ManualEverton DenardiAinda não há avaliações
- Seamless Fiux Fored Wire - Megafil250Documento1 páginaSeamless Fiux Fored Wire - Megafil250SungJun ParkAinda não há avaliações
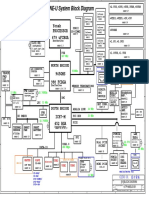
- Clevo M620ne-UDocumento34 páginasClevo M620ne-UHh woo't hoofAinda não há avaliações
- Inspection and Quality Control in Production ManagementDocumento4 páginasInspection and Quality Control in Production ManagementSameer KhanAinda não há avaliações
- 2015 Audi q5 sq5 71153 PDFDocumento302 páginas2015 Audi q5 sq5 71153 PDFPraveen100% (1)
- Connection DiagramsDocumento3 páginasConnection Diagramsfahad pirzadaAinda não há avaliações
- ANSYS Mechanical Basic Structural NonlinearitiesDocumento41 páginasANSYS Mechanical Basic Structural NonlinearitiesalexAinda não há avaliações
- Exterity g44 Serie 1.2 ManualDocumento87 páginasExterity g44 Serie 1.2 Manualruslan20851Ainda não há avaliações
- Rankel Engine.Documento16 páginasRankel Engine.Divya Prakash SrivastavaAinda não há avaliações
- NAWTEC18-3507: Comparison of Acid Gas Control Technologies in Efw FacilitiesDocumento10 páginasNAWTEC18-3507: Comparison of Acid Gas Control Technologies in Efw FacilitiesPunki KokoAinda não há avaliações
- 9C606C.64 To 65Documento24 páginas9C606C.64 To 65SHIRISHA YADAVAinda não há avaliações
- Ijet V3i6p54Documento6 páginasIjet V3i6p54International Journal of Engineering and TechniquesAinda não há avaliações
- MCS-011 Solved Assignment 2015-16 IpDocumento12 páginasMCS-011 Solved Assignment 2015-16 IpJigar NanduAinda não há avaliações
- Suzuki B-King Indicator Mod CompleteDocumento9 páginasSuzuki B-King Indicator Mod Completehookuspookus1Ainda não há avaliações