Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Maintenance ScheduleDocumento22 páginasMaintenance ScheduleDen100% (2)
- Cooler BalanceDocumento16 páginasCooler BalanceIrfan Ahmed100% (1)
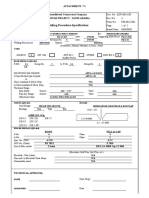
- Consolidated Contractors Welding Procedure SpecificationDocumento3 páginasConsolidated Contractors Welding Procedure Specificationsiva8000100% (1)
- OMM Volvo Penta TAD 851 VE PDFDocumento78 páginasOMM Volvo Penta TAD 851 VE PDFHariyono Busro100% (5)
- Taneks Deutz CatalogueDocumento123 páginasTaneks Deutz CatalogueeCommerce SAJID AutoAinda não há avaliações
- Gallic 16 Engels Hld23 TornoDocumento47 páginasGallic 16 Engels Hld23 TornoAdrian Macaya100% (1)
- Gas-Liquid Separators Sizing Parameter - Campbell Tip of The MonthDocumento18 páginasGas-Liquid Separators Sizing Parameter - Campbell Tip of The MonthsterlingAinda não há avaliações
- CDI 6: Fire Behavior and Arson Investigation ExamDocumento3 páginasCDI 6: Fire Behavior and Arson Investigation ExamRyan PelayreAinda não há avaliações
- Downtime BD TyreDocumento127 páginasDowntime BD TyreRidhani IqbalAinda não há avaliações
- Lect 5 - Mechanism DescriptionDocumento15 páginasLect 5 - Mechanism Descriptionjackie delos santosAinda não há avaliações
- Escort Limited Champion F 11 Brand Name - FarmtracDocumento12 páginasEscort Limited Champion F 11 Brand Name - Farmtrachugo fernandezAinda não há avaliações
- SA - Super Inverter - Original File PDFDocumento32 páginasSA - Super Inverter - Original File PDFJojit Cantillep MagbutayAinda não há avaliações
- General Catalog 2011: SELCO S.R.LDocumento194 páginasGeneral Catalog 2011: SELCO S.R.LPapp ZsoltAinda não há avaliações
- CVT PatriotDocumento37 páginasCVT PatriotErnesto Rivas SoteloAinda não há avaliações
- Retrofit BMBS InstructionsDocumento3 páginasRetrofit BMBS InstructionsPradipta SahooAinda não há avaliações
- Manual Awp Le Blanc Pag. 147Documento231 páginasManual Awp Le Blanc Pag. 147Ruben Alejandro Yam PechAinda não há avaliações
- National Oil Corporation: Rev Date Description Checked ApprovedDocumento14 páginasNational Oil Corporation: Rev Date Description Checked ApprovedRochdi SahliAinda não há avaliações
- 320D & 320D L Excavator Hydraulic System SchematicDocumento15 páginas320D & 320D L Excavator Hydraulic System SchematicchanlinAinda não há avaliações
- Branch Name B.E. Aeronautical Engineering: Semes Ter Subject Name Subject Code Exam Date SessionDocumento99 páginasBranch Name B.E. Aeronautical Engineering: Semes Ter Subject Name Subject Code Exam Date SessionCoding HintsAinda não há avaliações
- Shear & Diagonal Tension in BeamsDocumento15 páginasShear & Diagonal Tension in BeamsS. M. ZAHIDUR RAHMAN 1301129Ainda não há avaliações
- High Pressure Gear Pump GuideDocumento12 páginasHigh Pressure Gear Pump GuideMauricio Ariel H. OrellanaAinda não há avaliações
- Adjusting Hydraulic Conversion Brake-Park BrakeDocumento2 páginasAdjusting Hydraulic Conversion Brake-Park Brakev53Ainda não há avaliações
- Chapter 2Documento35 páginasChapter 2Eba GetachewAinda não há avaliações
- Tofd & Pe ReportDocumento1 páginaTofd & Pe ReportLuong Ho VuAinda não há avaliações
- 236d ElectricalDocumento4 páginas236d ElectricalJavier CaceresAinda não há avaliações
- Nominal Performance: Hermetic Compressor Model: Aw 2495Zk-P BOM ID: 972-A1Documento1 páginaNominal Performance: Hermetic Compressor Model: Aw 2495Zk-P BOM ID: 972-A1Zikko FirmansyahAinda não há avaliações
- h06961 Accu PulseDocumento1 páginah06961 Accu PulsekirankirkAinda não há avaliações
- Terminal Blocks ABBDocumento36 páginasTerminal Blocks ABBalishaikh12Ainda não há avaliações
- Experiment # 10Documento4 páginasExperiment # 10Usama0% (1)
- Thermal Physics - DPP 11 of (Lec 23) - Saakaar Batch For IIT JAM PhysicsDocumento3 páginasThermal Physics - DPP 11 of (Lec 23) - Saakaar Batch For IIT JAM PhysicsAnkur TiwariAinda não há avaliações