Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- ConciousnessDocumento5 páginasConciousnessavenkyAinda não há avaliações
- ConciousnessDocumento5 páginasConciousnessavenkyAinda não há avaliações
- Cp5152 Advanced Computer ArchitectureDocumento1 páginaCp5152 Advanced Computer ArchitectureDennis Ebenezer Dhanaraj100% (1)
- Balance Scale ManualDocumento16 páginasBalance Scale ManualavenkyAinda não há avaliações
- Conf Proceedings IndexDocumento33 páginasConf Proceedings IndexavenkyAinda não há avaliações
- SVMTutorial PDFDocumento43 páginasSVMTutorial PDFOnyong GalarionAinda não há avaliações
- A Bayesian Approach For Shadow Extraction From A Single ImageDocumento8 páginasA Bayesian Approach For Shadow Extraction From A Single ImageavenkyAinda não há avaliações
- How To Do Graduate-Level Research: Some AdviceDocumento12 páginasHow To Do Graduate-Level Research: Some AdvicevalethedoctorAinda não há avaliações
- Chb01 SummaryDocumento5 páginasChb01 SummaryavenkyAinda não há avaliações
- Mosix Instrukcja AngDocumento7 páginasMosix Instrukcja AngburholAinda não há avaliações
- DC EndsemsDocumento157 páginasDC Endsemsashishkr23438Ainda não há avaliações
- OS 4th Sem SyllabusDocumento4 páginasOS 4th Sem Syllabusraju gtAinda não há avaliações
- LINK HỌC ONLINE-HK2-21-22-3Documento42 páginasLINK HỌC ONLINE-HK2-21-22-3Fǫét StormlineAinda não há avaliações
- Synchronization in JavaDocumento13 páginasSynchronization in JavaMITALI SHARMAAinda não há avaliações
- 11 Aneka in Cloud ComputingDocumento14 páginas11 Aneka in Cloud Computingsai chitraAinda não há avaliações
- FCFSDocumento4 páginasFCFSsneha555Ainda não há avaliações
- Unit 9Documento34 páginasUnit 9Anonymous 7wk2G5BXAinda não há avaliações
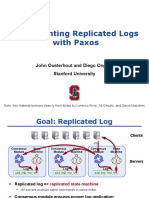
- Implementing Replicated Logs With Paxos: John Ousterhout and Diego Ongaro Stanford UniversityDocumento33 páginasImplementing Replicated Logs With Paxos: John Ousterhout and Diego Ongaro Stanford UniversityNarasimha Murthy GangaiahAinda não há avaliações
- Advanced Computer ArchitectureDocumento2 páginasAdvanced Computer Architecturesatraj5Ainda não há avaliações
- ch3 AOSDocumento48 páginasch3 AOSMuhammad AbbasAinda não há avaliações
- Module 2 Cpu SchedulingDocumento67 páginasModule 2 Cpu SchedulingJoseph PrasanthAinda não há avaliações
- t4 Multicore White Paper 1984594Documento44 páginast4 Multicore White Paper 1984594Alexa diazAinda não há avaliações
- Os Unit 3Documento74 páginasOs Unit 3balu 1203Ainda não há avaliações
- Data Guru Non 2019 deDocumento75 páginasData Guru Non 2019 dejulhedioAinda não há avaliações
- Chap 06Documento62 páginasChap 06api-26090714Ainda não há avaliações
- 4.0: Literature Review: Round Robin CPU Scheduling AlgorithmDocumento9 páginas4.0: Literature Review: Round Robin CPU Scheduling AlgorithmVaishnavi PatilAinda não há avaliações
- Object Oriented Programming Through Java: G.Praveen Itdept-SnistDocumento88 páginasObject Oriented Programming Through Java: G.Praveen Itdept-Snistprasad varmaAinda não há avaliações
- Spark IntroductionDocumento19 páginasSpark Introductionalpha0Ainda não há avaliações
- Install TunerDocumento5 páginasInstall Tunercamilo896857Ainda não há avaliações
- Rcu Decade LaterDocumento12 páginasRcu Decade LaterVipin SharmaAinda não há avaliações
- CSE-3611 (Operating System) : Segment:-1Documento4 páginasCSE-3611 (Operating System) : Segment:-1Zishan CseAinda não há avaliações
- Osslip 1Documento88 páginasOsslip 1Sandipa ShindeAinda não há avaliações
- OS4Documento15 páginasOS4Kaustubh patilAinda não há avaliações
- CSE2005 ETH Reference Material I Module2 ThreadsDocumento39 páginasCSE2005 ETH Reference Material I Module2 ThreadsKanishka MalikAinda não há avaliações
- Operating System Exercises - Chapter 5-ExrDocumento2 páginasOperating System Exercises - Chapter 5-ExrevilanubhavAinda não há avaliações
- Sistem Operasi 10Documento43 páginasSistem Operasi 10renggaslbonAinda não há avaliações
- OS FullDocumento46 páginasOS Full66 Rohit PatilAinda não há avaliações
- Multithreading: Object Oriented Programming 1Documento102 páginasMultithreading: Object Oriented Programming 1Kalyan MajjiAinda não há avaliações