Escolar Documentos
Profissional Documentos
Cultura Documentos
Guia de PLC
Enviado por
Javier MaestreTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Guia de PLC
Enviado por
Javier MaestreDireitos autorais:
Formatos disponíveis
Concept 2.
6 Biblioteca de mdulos IEC Parte: CONT_CTL
01/2007
33002250.04
www.telemecanique.com
Tabla de materias
Informacin de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Parte I
Generalidades sobre la biblioteca de bloques CONT_CTL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Captulo 1 Captulo 2
Parametrizacin de funciones y bloques de funcin . . . . . . . 23
Parametrizacin de funciones y bloques de funcin . . . . . . . . . . . . . . . . . . . . . . 24
Informacin general sobre la biblioteca de bloques CONT_CTL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Introduccin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Grupos de la biblioteca de bloques CONT_CTL . . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Exploracin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Procesado de errores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Denominacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 28 34 36 37 38
Parte II Descripciones EFB (desde A hasta PH). . . . . . . . . . . . . 39
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Captulo 3
ALIM: Limitador de crecimiento de segundo orden . . . . . . . . 41
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 42 43 44 45
Captulo 4
AUTOTUNE: Ajuste automtico del regulador . . . . . . . . . . . . 47
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 Principio del ajuste automtico del regulador . . . . . . . . . . . . . . . . . . . . . . . . . . . 51 Principio de identificacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 Acoplamiento del regulador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57 Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58 Diagnstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59 Estado del ajuste automtico del regulador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60 Causas de un inicio fallido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 Causas de la interrupcin del ajuste automtico del regulador . . . . . . . . . . . . . . 62 Realizacin de una prueba despus de finalizar el ajuste automtico del regulador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Captulo 5
COMP_DB: Comparacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Captulo 6
COMP_PID: Regulador PID avanzado . . . . . . . . . . . . . . . . . . . 73
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 Diagrama de estructura del regulador PID avanzado . . . . . . . . . . . . . . . . . . . . . 78 Parametrizacin del regulador COMP_PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 Antiwindup para COMP_PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82 Seleccin del tipo de regulador para COMP_PID . . . . . . . . . . . . . . . . . . . . . . . . 83 Conmutacin de modalidad de servicio sin brusquedad . . . . . . . . . . . . . . . . . . . 84 Seleccin de la modalidad de servicio del COMP_PID . . . . . . . . . . . . . . . . . . . . 88 Frmulas detalladas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Captulo 7
DEADTIME: Unidad de tiempo muerto. . . . . . . . . . . . . . . . . . . 95
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97 Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98 Ejemplo del comportamiento del bloque de funcin . . . . . . . . . . . . . . . . . . . . . . 99 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Captulo 8
DELAY: Unidad de tiempo muerto . . . . . . . . . . . . . . . . . . . . . 101
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Kurzbeschreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplo del comportamiento del bloque de funcin . . . . . . . . . . . . . . . . . . . . . 101 102 103 104 106 107 108 109 110 111 112 112 113 114 115 116 119 120 122 123 124 125 126 127 128 131 135 136 139 140 141 143 144
Captulo 9
DERIV: Diferenciador con alisamiento . . . . . . . . . . . . . . . . . . 107
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplo del bloque de funcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 10
DTIME: Retardo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Inicializaciones y modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplo de medicin de un caudal de paso . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 11
FGEN: Generador de funciones . . . . . . . . . . . . . . . . . . . . . . . 123
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seleccin de la funcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Definicin de la funcin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Diagramas de las distintas funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Casos especiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Cronogramas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 12
INTEG: Integrador con limitacin . . . . . . . . . . . . . . . . . . . . . . 139
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 13
INTEGRATOR: Integrador con limitacin . . . . . . . . . . . . . . . 145
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Captulo 14
INTEGRATOR1: Integrador con limitacin . . . . . . . . . . . . . . 151
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Captulo 15
K_SQRT: Raz cuadrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Captulo 16
LAG: Unidad de retardo de primer orden . . . . . . . . . . . . . . . 161
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
Captulo 17
LAG1: Unidad de retardo de primer orden . . . . . . . . . . . . . . 167
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Captulo 18
LAG2: Unidad de retardo de segundo orden . . . . . . . . . . . . 173
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176 Diagramas de ciclos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Captulo 19
LAG_FILTER: Unidad de retardo de primer orden . . . . . . . . 179
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
Captulo 20
LDLG: Unidad PD con alisamiento . . . . . . . . . . . . . . . . . . . . . 185
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplos del bloque de funcin LDLG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185 186 187 188 189 191 192 193 194 195 196 197 198 199 201 203 204 205 206 207 209 210 211 212 213 215 216 217 218 219
Captulo 21
LEAD: Diferenciador con alisamiento . . . . . . . . . . . . . . . . . . 191
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 22
LEAD_LAG: Unidad PD con alisamiento . . . . . . . . . . . . . . . . 195
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplos del bloque de funcin LEAD_LAG. . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 23
LEAD_LAG1: Unidad PD con alisamiento . . . . . . . . . . . . . . . 203
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplos para el bloque de funcin LEAD_LAG1. . . . . . . . . . . . . . . . . . . . . . .
Captulo 24
LIMV: Limitador de crecimiento de primer orden . . . . . . . . . 209
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 25
MFLOW: Bloque para caudal volumtrico . . . . . . . . . . . . . . . 215
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 26
MS: Control manual de una salida . . . . . . . . . . . . . . . . . . . . . 221
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224 Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
Captulo 27
MULDIV_W: Multiplicacin / Divisin. . . . . . . . . . . . . . . . . . . 231
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
Captulo 28
PCON2: Regulador de dos puntos . . . . . . . . . . . . . . . . . . . . . 235
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
Captulo 29
PCON3: Regulador de tres puntos . . . . . . . . . . . . . . . . . . . . . 243
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
Captulo 30
PD_or_PI: Conmutacin de la estructura PD / PI . . . . . . . . . 251
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253 Diagrama de estructura del bloque de funcin PD_or_PI . . . . . . . . . . . . . . . . . 255 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256 Frmulas detalladas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
Captulo 31
PDM: Modulacin por duracin de pulso . . . . . . . . . . . . . . . 263
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
Parte III Descripciones EFB (PI hasta Z) . . . . . . . . . . . . . . . . . . 271
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
Captulo 32
PI: Regulador PI: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplo de un regulador PI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273 274 275 277 278 280 281 282 283 284 285 286 287 289 290 291 293 294 295 297 298 302 304 307 308 309 311 312 314 317 320
Captulo 33
PI1: Regulador PI:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplo del regulador PI1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 34
PI_B: Regulador PI simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ecuaciones detalladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 35
PID: Regulador PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Diagrama de estructura del bloque de funcin PID. . . . . . . . . . . . . . . . . . . . . . Parametrizacin del regulador PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas detalladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 36
PID1: Regulador PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323 Diagrama de estructura del bloque de funcin PID1 . . . . . . . . . . . . . . . . . . . . . 325 Parametrizacin del regulador PID1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326 Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 328 Frmulas detalladas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
Captulo 37
PID_P: Regulador PID con estructura paralela . . . . . . . . . . . 335
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338 Parametrizacin del regulador PID_P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340 Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342 Frmulas detalladas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
Captulo 38
PID_PF: Regulador PID con estructura paralela . . . . . . . . . . 347
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349 Parametrizacin del regulador PID_PF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351 Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353 Frmulas detalladas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
Captulo 39
PIDFF: Regulador PID completo. . . . . . . . . . . . . . . . . . . . . . . 359
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361 Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364 Diagrama de estructura del regulador PIDFF. . . . . . . . . . . . . . . . . . . . . . . . . . . 366 Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367 Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372 Ecuaciones detalladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373 Ecuaciones detalladas: Algoritmo incremental regulador PID . . . . . . . . . . . . . . 376 Ecuaciones detalladas: Algoritmo incremental en modalidad integral . . . . . . . . 378 Ejemplos del bloque PIDFF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385
10
Captulo 40
PIDP1: Regulador PID con estructura paralela . . . . . . . . . . . 387
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parametrizacin del regulador PIDP1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas detalladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387 388 389 391 393 394 396 397 398 399 401 402 404 406 407 409 410 411 413 414 416 417 418 419 420 421 422 423 426 429 430 431 432 433 435
Captulo 41
PIP: Regulador PIP en cascada. . . . . . . . . . . . . . . . . . . . . . . . 397
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Diagrama de estructura del bloque de funcin PIP. . . . . . . . . . . . . . . . . . . . . . Parametrizacin del regulador en cascada PIP . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas detalladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 42
PPI: Regulador PPI en cascada. . . . . . . . . . . . . . . . . . . . . . . . 409
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Diagrama de estructura del bloque de funcin PPI. . . . . . . . . . . . . . . . . . . . . . Parametrizacin del regulador en cascada PPI . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas detalladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 43
PWM: Modulacin por ancho de pulso. . . . . . . . . . . . . . . . . . 419
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplos del bloque PWM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 44
PWM1: Modulacin por ancho de pulso. . . . . . . . . . . . . . . . . 429
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplo del bloque PWM1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
Captulo 45
QDTIME: Unidad de tiempo muerto . . . . . . . . . . . . . . . . . . . . 437
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 437 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 438 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 439 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440
Captulo 46
QPWM: Modulacin por ancho de pulso (simple) . . . . . . . . 443
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445 Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 447 Ejemplo del bloque QPWM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 449
Captulo 47
RAMP: Generador de rampas . . . . . . . . . . . . . . . . . . . . . . . . . 451
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 451 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455
Captulo 48
RATIO: Regulador proporcional . . . . . . . . . . . . . . . . . . . . . . . 457
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 458 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 459 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 460 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462
Captulo 49
SCALING: Escalado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464 Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466
Captulo 50
SCON3: Regulador de tres puntos de a pasos . . . . . . . . . . . 467
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 467 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 468 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 469 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 470 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472
12
Captulo 51
SERVO: Control para servomotores elctricos . . . . . . . . . . . 473
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Algoritmos para el bloque de funcin SERVO . . . . . . . . . . . . . . . . . . . . . . . . . Modalidades de servicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ejemplos del bloque de funcin SERVO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473 474 474 476 478 479 480 487 489 490 490 491 492 495 496 497 499 502 503 504 505 506 508 509 510 511 512 514 515 516 517 518 520
Captulo 52
SMOOTH_RATE: Diferenciador con alisamiento. . . . . . . . . . 489
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Frmulas para el bloque de funcin SMOOTH_RATE . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 53
SP_SEL: Conmutador de valor terico. . . . . . . . . . . . . . . . . . 495
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 54
SPLRG: Control de dos actuadores . . . . . . . . . . . . . . . . . . . . 503
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 55
STEP2: Regulador de dos puntos. . . . . . . . . . . . . . . . . . . . . . 509
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Captulo 56
STEP3: Regulador de tres puntos. . . . . . . . . . . . . . . . . . . . . . 515
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
Captulo 57
SUM_W: Sumador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523
Captulo 58
THREEPOINT_CON1: Regulador de tres puntos . . . . . . . . . 525
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 528 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 531
Captulo 59
THREE_STEP_CON1: Regulador de tres puntos de a pasos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538
Captulo 60
TOTALIZER: Integrador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 539
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 539 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 540 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 541 Frmulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 547
Captulo 61
TWOPOINT_CON1: Regulador de dos puntos . . . . . . . . . . . 549
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 549 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 550 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 551 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554
Captulo 62
VEL_LIM: Limitador de crecimiento . . . . . . . . . . . . . . . . . . . . 555
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555 Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556 Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557 Descripcin detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 558 Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559
14
Captulo 63
VLIM: Limitador de crecimiento de primer orden . . . . . . . . . 561
Vista general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Representacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Descripcin detallada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Error de tiempo de ejecucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 561 562 563 564 565
Glosario ndice
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 567 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593
15
16
Informacin de seguridad
Informacin importante
AVISO Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo antes de instalarlo, utilizarlo o realizar su mantenimiento. Los mensajes especiales que se ofrecen a continuacin pueden aparecer a lo largo de la documentacin o en el equipo para advertir de peligros potenciales o para ofrecer informacin que aclare o simplifique los distintos procedimientos.
La inclusin de este icono en una etiqueta de peligro o advertencia indica un riesgo de descarga elctrica, que puede provocar lesiones si no se siguen las instrucciones. ste es el icono de alerta de seguridad. Se utiliza para advertir de posibles riesgos de lesiones. Observe todos los mensajes que siguen a este icono para evitar posibles lesiones o incluso la muerte.
PELIGRO
PELIGRO indica una situacin inminente de peligro que, si no se evita, provocar lesiones graves o incluso la muerte.
ADVERTENCIA
ADVERTENCIA indica una posible situacin de peligro que, si no se evita, puede provocar daos en el equipo, lesiones graves o incluso la muerte.
ADVERTENCIA
ADVERTENCIA indica una posible situacin de peligro que, si no se evita, puede provocar lesiones o daos en el equipo.
33002250
17
Informacin de seguridad
TENGA EN CUENTA
Slo el personal de servicio cualificado podr instalar, utilizar, reparar y mantener el equipo elctrico. Schneider Electric no asume las responsabilidades que pudieran surgir como consecuencia de la utilizacin de este material. 2007 Schneider Electric. Todos los derechos reservados.
18
33002250
Acerca de este libro
Presentacin
Objeto Esta documentacin le ayudar en la configuracin de las funciones y los mdulos de funciones. Esta documentacin se refiere a Concept 2.6 en Microsoft Windows 98, Microsoft Windows 2000, Microsoft Windows XP y Microsoft Windows NT 4.x. Nota: Encontrar ms informacin en el archivo README de Concept.
Campo de aplicacin
Documentos relacionados
Ttulo Instrucciones de instalacin de Concept Manual de usuario de Concept Concept EFB User Manual Biblioteca de mdulos Concept LL984
Reference Number 840 USE 502 03 840 USE 503 03 840 USE 505 00 840 USE 506 03
Puede descargar estas publicaciones tcnicas y otra informacin tcnica de nuestro sitio Web en www.telemecanique.com Comentarios del usuario Enve sus comentarios a la direccin electrnica techpub@schneider-electric.com
33002250
19
Acerca de este libro
20
33002250
Generalidades sobre la biblioteca de bloques CONT_CTL
Vista general
Introduccin Esta seccin comprende informacin general sobre la biblioteca de bloques CONT_CTL. Esta parte contiene los siguientes captulos:
Captulo 1 2 Nombre del captulo Parametrizacin de funciones y bloques de funcin Informacin general sobre la biblioteca de bloques CONT_CTL Pgina 23 27
Contenido
33002250
21
Generalidades
22
33002250
Parametrizacin de funciones y bloques de funcin
33002250
23
Parametrizacin
Parametrizacin de funciones y bloques de funcin
Generalidades Cada FFB se compone de una operacin, los operandos necesarios para la operacin y un nombre de ejemplar/contador de funciones. FFB
(p.e. retardo de conexin)
Nombre/contador de funciones del ejemplar
(p.e. FBI_2_22 (18))
Operacin
(p.e TON)
Operando
Parmetro formal
(p.e. IN,PT,Q,ET)
Parmetro actual
Variable, elemento de una variable de elementos mltiples, direccin literal, directa (p.e. ENABLE, EXP.1, TIME, ERROR, OUT, %4:0001)
FBI_2_22 (18) TON ENABLE EXP.1 TIME EN IN PT ENO Q ET ERROR OUT %4:00001
Operacin
La operacin establece la funcionalidad que se debe ejecutar por el FFB, p. ej., registro de corrimientos, operaciones de conversin El operando determina con lo que se debe ejecutar la operacin. En FFBs est compuesto de parmetros formales y parmetros actuales.
Operando
24
33002250
Parametrizacin
Parmetros formales / Parmetros actuales
El parmetro formal es una reserva de lugar para un operando. Durante la parametrizacin se le asigna un parmetro actual al parmetro formal (parmetro actual). El parmetro actual puede ser una variable, una variable de elementos mltiples, un elemento de una variable de elementos mltiples, un literal o una direccin directa. Cada FFB dispone de la posibilidad de la llamada "condicional" o "incondicional". La condicin se realiza mediante una unin delante de la entrada EN. EN visualizada Llamada condicional (slo si el EN = 1 se procesar FFB) EN oculta Llamada incondicional (el FFB ser siempre procesado)
Llamada a funciones y bloques de funcin en IL y ST
33002250
l l
Llamada condicional / incondicional
Nota: Si no se parametriza la entrada EN sta se deber ocultar. Debido a que las entradas no parametrizadas se ocupan automticamente con un "0", el FFB no se procesara jams en caso contrario.
Nota: En el caso de los bloques de funciones bloqueados (EN = 0) con funcin de tiempo interna (por ejemplo: DELAY) el tiempo parece seguir corriendo, ya que cuentan con la ayuda del reloj del sistema y no dependen del ciclo del programa ni de que el bloque est habilitado.
La llamada a funciones y bloques de funcin en IL (lista de instrucciones) y ST (texto estructurado) deber consultarlas en los correspondientes captulos del Manual de usuario.
25
Parametrizacin
26
33002250
Informacin general sobre la biblioteca de bloques CONT_CTL
Introduccin
Vista general Esta seccin contiene informacin general sobre la biblioteca de bloques CONT_CTL. Este captulo contiene los siguiente apartados:
Apartado Grupos de la biblioteca de bloques CONT_CTL Modalidades de servicio Exploracin Procesado de errores Denominacin Pgina 28 34 36 37 38
Contenido:
33002250
27
Introduccin
Grupos de la biblioteca de bloques CONT_CTL
Vista general de los grupos La biblioteca "Continuous Control"(CONT-CTL) est estructurada en 7 grupos con bloques de funcin elementales (EFBs):
Grupo CLC Contenido Contiene bloques de funcin tcnicos de regulacin como, por ejemplo, filtros, reguladores, integradores y unidades de tiempo muerto Contiene otra seleccin de bloques de funcin tcnicos de regulacin EFBs para el procesamiento del valor de medicin o de otra magnitud discreta EFBs reguladores y bloques de ajuste automtico del regulador EFBs para funciones matemticas de regulacin EFBs para el control de los diferentes tipos de actuadores EFBs para la generacin y la seleccin del valor terico
CLC_PRO Conditioning Controller Mathematics Output Processing Setpoint Management
Grupo "CLC"
Este grupo contiene los siguientes EFBs:
Bloque DELAY INTEGRATOR1 LAG1 LEAD_LAG1 LIMV PI1 PID1 PIDP1 SMOOTH_RATE THREEPOINT_CON1 THREE_STEP_CON1 TWOPOINT_CON1 Significado Unidad de tiempo muerto Integrador con limitacin (Modalidades de servicio: Manual, Detenido, Automtico) Unidad de retardo de primer orden Unidad PD con alisamiento Limitador de crecimiento de primer orden Regulador PI Regulador PID Regulador PID con estructura paralela Diferenciador con alisamiento Regulador de tres puntos Regulador de tres puntos de a pasos Regulador de dos puntos
28
33002250
Introduccin
Grupo "CLC_PRO"
Este grupo contiene los siguientes EFBs:
Bloque ALIM COMP_PID DEADTIME DERIV FGEN INTEG LAG LAG2 LEAD_LAG PCON2 PCON3 PD_or_PI PDM PI PID PID_P PIP PPI PWM QPWM SCON3 VLIM Significado Limitador de crecimiento de segundo orden Regulador PID avanzado Unidad de tiempo muerto Diferenciador con alisamiento Generador de funciones Integrador con limitacin Unidad de retardo de primer orden Unidad de retardo de segundo orden Unidad PD con alisamiento Regulador de dos puntos Regulador de tres puntos Conmutacin de la estructura PD / PI Modulacin por duracin de pulso Regulador PI Regulador PID Regulador PID con estructura paralela Regulador PIP en cascada Regulador PPI en cascada Modulacin por ancho de pulso Modulacin por ancho de pulso (simple) Regulador de tres puntos de a pasos Limitador de crecimiento de primer orden
33002250
29
Introduccin
Grupo "Conditioning"
Este grupo contiene los EFBs para los procesamientos que, por lo general, estn situados delante de los reguladores, como el procesamiento del valor de medicin de la magnitud de regulacin, las magnitudes de perturbacin u otras magnitudes discretas. Adems de filtros y otras funciones clsicas, este grupo contiene tambin funciones de retardo y de adicin. Este grupo contiene los siguientes EFBs:
Bloque DTIME INTEGRATOR LAG_FILTER LDLG LEAD MFLOW Significado Funcin de retardo para ms precisin o para la modificacin dinmica (online) del valor de retardo. Integrador con limitacin (Modalidades de servicio Tracking y Automtico) Unidad de retardo de primer orden Unidad PD con alisamiento (avanzador / retardador de fase) Diferenciador con alisamiento Regulador para caudal volumtrico, p. ej., para el procesamiento de la medicin de presin diferencial de un dispositivo reductor Unidad de tiempo muerto, funcin de retardo para la parametrizacin rpida (Q = Quick) Escalado de todas las magnitudes discretas Integrador, para integrar un caudal y calcular de esta forma un caudal volumtrico. Por medio de este EFB se pueden tener en consideracin valores muy pequeos, incluso si el volumen total es importante. La funcin posee un contador parcial de volumen y un contador de volumen total. Limitacin de crecimiento de una magnitud de entrada o intermedia.
QDTIME SCALING TOTALIZER
VEL_LIM
30
33002250
Introduccin
Grupo "Controller"
Este grupo contiene, entre otros, un bloque para el ajuste automtico del regulador (AUTOTUNE). Este bloque est adaptado a los bloques de regulacin PI_B y PIDFF. De esta forma se pueden programar aplicaciones de autoregulacin. Este grupo contiene los siguientes EFBs:
Bloque AUTOTUNE PI_B PIDFF STEP2 STEP3 Significado Ajuste automtico del regulador Regulador PI simple Regulador PID completo Regulador de dos puntos Regulador de tres puntos
Grupo "Mathematics"
En el rango de regulacin se utilizan las funciones aritmticas a menudo en relacin con zonas de insensibilidad y ponderaciones. Partiendo de este principio, este grupo abarca funciones aritmticas de utilizacin directa. Multiplicacin / divisin con ponderacin: MULDIV_W Adicin ponderada: SUM_W Comparacin con zona de insensibilidad e histresis COMP_DB Raz cuadrada con punto de separacin y ponderacin: K_SQRT
Este grupo contiene los siguientes EFBs:
Bloque COMP_DB K_SQRT MULDIV_W SUM_W Significado Comparacin Raiz cuadrada Multiplicacin / divisin Sumador
33002250
l l l l
31
Introduccin
Grupo "Output Processing"
A menudo, no es posible utilizar directamente la salida de regulacin para controlar el actuador. Por ejemplo, como en los tpicos casos de los procesos que utilizan servomotores elctricos, se debe utilizar un bloque SERVO supeditado al regulador. Si dos actuadores manejan la misma magnitud se debe utilizar el bloque de funcin SPLRG. Este bloque de funcin funciona tanto como regulador paso a paso de tres puntos (cuando los actuadores son antagnicos), as como en la modalidad de servicio "split-range" (cuando los actuadores se complementan). El bloque PWM1 permite una modulacin por ancho de pulso de, por ejemplo, una magnitud de posicionado de un regulador continuo anterior (PI, PID). A pesar de que todos los bloques de regulacin pueden funcionar en la modalidad Manual, a menudo es necesario utilizar el bloque de funcin MS. Este bloque permite un control ampliado de la modalidad Manual La variable que se debe controlar no es directamente la salida del regulador La salida no se controla a travs de un circuito de regulacin El circuito de regulacin dispone de un intervalo de exploracin prolongado (1 s y ms)
Este grupo contiene los siguientes EFBs:
Bloque MS PWM1 SERVO SPLRG Significado Control manual de una salida Modulacin por ancho de pulso Control para servomotores elctricos Control de dos actuadores
32
l l l
33002250
Introduccin
Grupo "Setpoint Management"
La funcin clsica de "seleccin del valor terico" no se encuentra integrada en los bloques de regulacin, sino en los bloques de funcin SP_SEL. Esta estructura modular permite una mayor flexibilidad y facilidad de manejo, sin tener que renunciar a la ampliacin de funciones. Entre ellas: El seguimiento del valor real, si el circuito de regulacin est ajustado a la modalidad manual. La conmutacin interna / externa sin brusquedad La conmutacin interna / externa sin brusquedad (con seguimiento del valor terico)
Otros dos bloques de funcin permiten generar el valor terico que se debe supeditar al regulador: el bloque de funcin RATIO, que se utiliza para controlar una magnitud en funcin de otra (regulacin proporcional) y el bloque RAMP, que permite generar un valor terico en forma de rampa. Este grupo contiene los siguientes EFBs:
Bloque RAMP RATIO SP_SEL Significado Generador de rampas Regulador proporcional Conmutador de valor terico
33002250
l l l
33
Introduccin
Modalidades de servicio
Modalidades de servicio Diferentes bloques de funcin disponen de un control integrado de modalidades de servicio. Se puede seleccionar entre las siguientes modalidades: Tracking (seguimiento) Manual / Automtico.
Adems, se explica la secuencia prioritaria de las modalidades de servicio. Tracking Esta modalidad permite ajustar un bloque de funcin a la modalidad de servicio "regulador de seguimiento". Dos entradas permiten el control de esta modalidad: una entrada binaria TR_S (TRacking Switch), as como una entrada numrica TR_I (TRacking Input). Si un bloque de funcin se encuentra en la modalidad Tracking (TR_S = 1) se conectar a su salida principal (p. ej., OUT en un regulador PIDFF) el valor de entrada TR_I y se actualizarn las variables internas de los diferentes algoritmos. De esta forma se garantizar una conmutacin sin brusquedad, si el bloque de funcin pasa a la modalidad Manual o a Automtico. En la modalidad Tracking se controla la salida OUT del FFB por medio de la entrada TR_I. Modalidad de servicio Tracking
Se puede aplicar una limitacin en la salida del bloque de funcin si ste se encuentra en la modalidad de servicio Tracking: esto se debe decidir individualmente para los distintos bloques de funcin.
34
l l l l l
TR_S Funcin OUT TR_I
Esta modalidad se puede aplicar en diferentes casos: Inicializacin en la fase de inicio, Modalidad Tracking en caso de autmatas redundantes para poder garantizar un inicio sin brusquedad del autmata auxiliar, Control de la modalidad por medio de un programa para evitar, por ejemplo, el control directo de la magnitud de posicionado, si un ajuste automtico del regulador, etc., se encuentra en curso.
33002250
Introduccin
Manual / Automtico
Si un bloque de funcin se encuentra en la modalidad de servicio Automtico su algoritmo calcular el valor que se debe aplicar a la salida. A travs de la modalidad Manual se puede bloquear el ajuste de la salida principal (OUT) de un bloque de funcin, para poder controlarlo a continuacin, por ejemplo, por medio de un dilogo de usuario. La entrada MAN_AUTO permite el control de esta modalidad (0 : Manual, 1 : Automtico). Modalidad Manual / Automtico
MAN_AUTO Auto Funcin OUT Manual
No obstante, el bloque de funcin leer esta salida y permitir de esta forma una conmutacin sin brusquedad entre las modalidades Manual <-> Automtico. Se puede aplicar una limitacin en la salida del bloque de funcin si ste se encuentra en la modalidad de servicio Manual o Automtico: esto se debe decidir de forma individual para cada bloque de funcin. Secuencia prioritaria de las modalidades de servicio Si un bloque de funcin dispone de ambas modalidades, la modalidad Tracking tiene prioridad frente a la modalidad Manual / Automtico:
TR_S MAN_AUTO Funcin TR_I OUT
Por razones de claridad no se han representado las uniones entre la funcin y la modalidad de servicio del bloque de funcin. Tampoco se representa el valor de posicionamiento efectivo aplicado.
33002250
35
Introduccin
Exploracin
Exploracin Los algoritmos de regulacin se basan en valores de exploracin en los cuales se debe considerar el intervalo de tiempo entre dos ciclos consecutivos. Los bloques de funcin calculan automticamente este valor del intervalo, es decir, se pueden ajustar en cualquier posicin de las secciones de Concept sin tener en cuenta la gestin del tiempo. Con un intervalo de tiempo fijo se pueden realizar las siguientes funciones de regulacin: Optimizacin del tiempo de ejecucin del programa de PLC repartiendo las operaciones de regulacin en varios ciclos, Mejora de la calidad de regulacin, evitando el abuso de exploracin de los circuitos de regulacin Minimizar la solicitacin de los actuadores
Para esto se puede utilizar, por ejemplo, el bloque de funcin SAMPLETM, que se debe conectar a la entrada EN de los bloques de funcin que se desea explorar. Si el intervalo de exploracin de los circuitos de regulacin supera 1 segundo, el bloque de funcin MS: Control manual de una salida, p. 221 se deber supeditar a los bloques reguladores PIDFF: Regulador PID completo, p. 359 y PI_B: Regulador PI simple, p. 293 , de manera que se puedan controlar manualmente los circuitos de regulacin sin depender de los intervalos de exploracin.
36
l l l
33002250
Introduccin
Procesado de errores
Principio La mayora de los bloques de funcin de los grupos "Conditioning", "Controller", "Output Processing" y "Setpoint Management" disponen de una palabra de salida STATUS. En este captulo se describen los mecanismos de deteccin y aviso de errores que utilizan estos bloques de funcin. Cada bit del parmetro STATUS se puede utilizar para sealar un error, una alarma o una informacin. El significado de los primeros 8 bits de la palabra STATUS es idntico en todos los mdulos. El significado de los siguientes bits (bits 8 a 15) es distinto en cada bloque de funcin. Palabra de estado La siguiente tabla representa el significado comn de los bits de todos los bloques en el primer byte de la palabra STATUS. Encontrar ms informacin en la descripcin del respectivo bloque de funcin.
Bit Bit 0 = 1 Bit 1 = 1 Significado Error en el clculo con valores e n coma flotante (p. ej., clculo de la raz cuadrada de un nmero negativo) Tipo Error
La deteccin de un valor no permitido en una entrada de Error coma flotante puede tener las siguientes causas: el valor no es un valor en coma flotante el valor es infinito (p. ej., resultado de un clculo anterior al bloque de funcin)
Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Desbordamiento de capacidad en un clculo de valores con coma flotante Un parmetro de entrada se encuentra fuera del rango El valor utilizado internamente por el bloque de funcin ser recortado. La salida principal del bloque de funcin ha alcanzado el valor lmite inferior La salida principal del bloque de funcin ha alcanzado el valor lmite superior
Bit 5 = 1 (Nota 2) Bit 6 = 1 (Nota 2) Bit 7 = 1
Los lmites inferior y superior del rango de un parmetro de Error entrada son idnticos
33002250
l l
Divisin por cero en el clculo de valores con coma flotante Error Error Advertencia o informacin (Nota 1) Informacin Informacin
37
Introduccin
Nota 1 (parmetro de entrada)
Nota: Si el valor procede del rango de un parmetro con tipos de datos derivados (tpicamente el parmetro PARA), este recorte provocar una advertencia y el bit 4 se pondr a 1. Si el valor procede de una entrada de tipo simple no se sealizar ninguna advertencia, pero el bit 4 de la palabra STATUS se pondr a 1.
Nota 2 (valores lmite)
Nota: Si los parmetros de limitacin superior e inferior de una entrada se ha invertido (p. ej., out_min >= out_max), el bloque de funcin conmuta la salida al valor ms bajo (es decir, out_max).
Denominacin
Determinacin de la denominacin Si un parmetro booleano sirve para distinguir dos modalidades de servicio o dos estados de un bloque de funcin, su nombre tiene a menudo la forma: mode1_mode2 (Ejemplo: MANU_AUTO, SP_RSP). Por convencin, el valor correspondiente a mode1 es 0, y el valor correspondiente a mode2 ser 1. Es decir, por ejemplo, si el parmetro MANU_AUTO de un bloque de funcin es 0, el bloque se encontrar en la modalidad Manual. Se encontrar en la modalidad Automtico si MANU_AUTO es igual a 1.
38
33002250
Descripciones EFB (desde A hasta PH)
II
Vista general
Introduccin Las descripciones EFB estn reunidas por orden alfabtico. Nota: Se puede aumentar la cantidad de entradas de cada EFB hasta un mximo de 32, modificando la magnitud vertical del smbolo FFB. Consulte la descripcin de cada EFB para saber de cul se trata.
33002250
39
Descripciones EFB (desde A hasta PH)
Contenido
Esta parte contiene los siguientes captulos:
Captulo 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 Nombre del captulo ALIM: Limitador de crecimiento de segundo orden AUTOTUNE: Ajuste automtico del regulador COMP_DB: Comparacin COMP_PID: Regulador PID avanzado DEADTIME: Unidad de tiempo muerto DELAY: Unidad de tiempo muerto DERIV: Diferenciador con alisamiento DTIME: Retardo FGEN: Generador de funciones INTEG: Integrador con limitacin INTEGRATOR: Integrador con limitacin INTEGRATOR1: Integrador con limitacin K_SQRT: Raz cuadrada LAG: Unidad de retardo de primer orden LAG1: Unidad de retardo de primer orden LAG2: Unidad de retardo de segundo orden LAG_FILTER: Unidad de retardo de primer orden LDLG: Unidad PD con alisamiento LEAD: Diferenciador con alisamiento LEAD_LAG: Unidad PD con alisamiento LEAD_LAG1: Unidad PD con alisamiento LIMV: Limitador de crecimiento de primer orden MFLOW: Bloque para caudal volumtrico MS: Control manual de una salida MULDIV_W: Multiplicacin / Divisin PCON2: Regulador de dos puntos PCON3: Regulador de tres puntos PD_or_PI: Conmutacin de la estructura PD / PI PDM: Modulacin por duracin de pulso Pgina 41 47 69 73 95 101 107 113 123 139 145 151 157 161 167 173 179 185 191 195 203 209 215 221 231 235 243 251 263
40
33002250
ALIM: Limitador de crecimiento de segundo orden
Vista general
Introduccin Contenido: Este captulo describe el bloque ALIM. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 42 43 44 45
33002250
41
ALIM: Limitador de crecimiento de segundo orden
Descripcin breve
Descripcin de funcionamiento El bloque de funcin representa un limitador de crecimiento de 2 orden. En concreto, las propiedades del bloque de funcin son las siguientes: Modalidades de servicio: Manual, Detenido, Automtico Limitacin de la salida
Se pueden proyectar EN y ENO como parmetros adicionales.
42
l l
33002250
ALIM: Limitador de crecimiento de segundo orden
Representacin
Smbolo Representacin del bloque:
ALIM
REAL Mode_MH Para_ALIM REAL
X MODE PARA YMAN
REAL
Descripcin de parmetros ALIM
Descripcin de los parmetros de bloque:
Parmetros X MODE PARA YMAN Y Tipo de datos REAL Mode_MH Para_ALIM REAL REAL Significado Entrada Modalidad de servicio Parmetros Valor manual para la salida Y Salida
Descripcin de parmetros Mode_MH
Descripcin de la estructura de datos:
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
Descripcin de parmetros Para_ALIM
Descripcin de la estructura de datos:
Elemento max_v max_a Tipo de datos REAL REAL Significado Velocidad de crecimiento mxima (x mxima) Unidad: 1/[s] Aceleracin de crecimiento mxima (x mxima) Unidad: 1 s 2
33002250
43
ALIM: Limitador de crecimiento de segundo orden
Descripcin detallada
Parametrizacin La parametrizacin del bloque de funcin se realiza determinando la mxima velocidad de crecimiento max_v y la mxima aceleracin de crecimiento max_a. La mxima velocidad de crecimiento indica cunto puede cambiar el valor de la salida Y en un segundo. La aceleracin de crecimiento mxima indica cunto puede cambiar como mximo el valor de la velocidad de la salida Y. El valor de Y sigue al valor de X, pero est limitado por la velocidad de crecimiento y la aceleracin mximas permitidas. Modalidades de servicio Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidades de servicio Automtico Manual Detenido man 0 1 0 halt 0 01 1 Significado Constantemente se calcula y entrega un nuevo valor para Y. El valor manual YMAN se transmite de forma fija a la salida Y. La salida Y se mantendr en el ltimo valor calculado. La salida ya no se modificar, pero el usuario la podr sobrescribir.
44
33002250
ALIM: Limitador de crecimiento de segundo orden
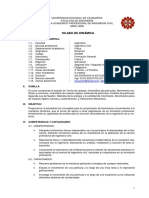
Ejemplo
En la figura se representa el comportamiento dinmico del bloque de funcin, as como la reaccin en la modalidad de servicio DETENIDO.
max_v
1s
0 1 0
halt
El bloque de funcin reacciona al salto en la entrada X con un crecimiento acelerado de la salida Y. La salida Y se acelera con la aceleracin de crecimiento establecida en max_a. En el momento en el que la velocidad de crecimiento alcanza el valor de max_v, ya no se acelerar ms, sino que la salida Y seguir la entrada X con la velocidad de crecimiento mxima max_v (vase tramo recto en el centro de la figura). Una vez que la salida Y se ha acercado lo suficiente al valor de la seal de entrada, se frenar la salida con la aceleracin de crecimiento negativa -max_a, de forma que la salida no se parar bruscamente, sino que alcanzar despacio su valor final.
Error de tiempo de ejecucin
Aviso de error Se efectuar un aviso de error cuando: haya un nmero de coma flotante no permitido en la entrada YMAN o X, max_a o max_v sean 0.
33002250
l l
45
ALIM: Limitador de crecimiento de segundo orden
46
33002250
AUTOTUNE: Ajuste automtico del regulador
Vista general
Introduccin Contenido: Este captulo describe el bloque AUTOTUNE. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Principio del ajuste automtico del regulador Principio de identificacin Parametrizacin Acoplamiento del regulador Modalidades de servicio Diagnstico Estado del ajuste automtico del regulador Causas de un inicio fallido Causas de la interrupcin del ajuste automtico del regulador Realizacin de una prueba despus de finalizar el ajuste automtico del regulador Error de tiempo de ejecucin Pgina 48 49 51 53 54 57 58 59 60 61 62 64 68
33002250
47
AUTOTUNE: Ajuste automtico del regulador
Descripcin breve
Descripcin de funcionamiento Este bloque de funcin permite ajustar automticamente el regulador PID (PIDFF: Regulador PID completo, p. 359, PI_B: Regulador PI simple, p. 293). Durante el inicio de la instalacin, el ajuste automtico del regulador estabiliza la regulacin y, por tanto, ahorra tiempo. Se pueden proyectar EN y ENO como parmetros adicionales. Algoritmo El algoritmo se basa en reglas heursticas, como, por ejemplo, el mtodo de ZieglerNichols. Primero se efecta un anlisis que corresponde, aproximadamente, a 2 veces y media el tiempo de reaccin del bucle abierto. De esta forma se puede identificar el proceso como proceso de primer orden con retardo. Basndose en este modelo se crea un juego de parmetros de regulacin basados en reglas heursticas y valores experimentales. El rango de parmetros se determina mediante el criterio perf. Este factor asigna en cada caso el rango mximo al tiempo de reaccin a los fallos o a la estabilidad. El algoritmo se aplica a los siguientes tipos de procesos: Procesos con slo una entrada/salida Procesos con estabilidad natural o con componente integral Procesos asimtricos dentro de los lmites permitidos por el algoritmo del regulador PID Procesos controlados mediante salidas de modulacin de duracin de impulsos (PWM) El bloque posee las siguientes caractersticas Estimacin previa de la regulacin para los tipos PDIFF o PI_B Funcin de diagnstico Parametrizacin de la dinmica de regulacin Restauracin de los anteriores ajustes del regulador
48
l l l l
Caractersticas importantes
l l l l
33002250
AUTOTUNE: Ajuste automtico del regulador
Representacin
Smbolo Representacin del bloque
AUTOTUNE
REAL REAL REAL BOOL BOOL Para_AUTOTUNE REAL BOOL
PV SP RCPY START PREV PARA TR_I TR_S
PV_O SP_O PARA_C
REAL REAL *
TRI TRS INFO STATUS
REAL BOOL Info_AUTOTUNE WORD
Parmetros del regulador ajustado automticamente (Para_PIDFF, Para_PI_B,... u otros)
Descripcin de parmetros AUTOTUNE
Descripcin de parmetros del bloque
Parmetros PV SP RCPY START PREV PARA TR_I TR_S PV_O SP_O PARA_C Tipo de datos REAL REAL REAL BOOL BOOL Para_AUTOTUNE REAL BOOL REAL REAL Parmetros del regulador ajustable automticamente (Para_PIDFF o Para_PI_B) REAL BOOL Info_AUTOTUNE WORD Significado Valor real (Process Value) Valor terico (Set Point) Copia de la magnitud de posicionado real "0 1" : Inicio del ajuste automtico del regulador Retorno a los anteriores ajustes del regulador Parmetros Entrada de inicio Comando de inicio Copia del valor real PV Copia de la entrada SP Parmetros de regulacin
TRI TRS INFO STATUS
33002250
Copia de la entrada TR_I Copia de la entrada TR_S Informacin Palabra de estado
49
AUTOTUNE: Ajuste automtico del regulador
Descripcin de parmetros Para_ AUTOTUNE
Descripcin de la estructura de datos
Elemento step_ampl Tipo de datos REAL Significado Valor del impulso de posicionado de salida (expresado en valores de la escala de salida out_inf, out_sup) Duracin del impulso de posicionado con ajuste automtico del regulador ndice de rendimiento entre 0 y 1 Palabra reservada
tmax perf plant_type
TIME REAL WORD
Descripcin de parmetros Info_AUTOTUNE
Descripcin de la estructura de datos
Elemento diag p1_prev p2_prev p3_prev p4_prev p5_prev p6_prev Tipo de datos UDINT REAL REAL REAL REAL REAL REAL Significado Palabra doble utilizada para el diagnstico Anterior valor del parmetro 1 Anterior valor del parmetro 2 Anterior valor del parmetro 3 Anterior valor del parmetro 4 Anterior valor del parmetro 5 Anterior valor del parmetro 6
50
33002250
AUTOTUNE: Ajuste automtico del regulador
Principio del ajuste automtico del regulador
Existen dos tipos de ajuste automtico del regulador Son posibles dos tipos de ajuste automtico del regulador: ajuste automtico del regulador con arranque del sistema en caliente y en fro. La primera fase del ajuste automtico del regulador es vlida para los dos tipos: se trata de una prueba de estabilidad y ruido del proceso de regulacin con una duracin aproximada de 0.5 * tmax con salidas constantes. Las siguientes fases dependen del tipo de ajuste. Se habla de ajuste automtico del regulador para arranque en fro si la variacin entre el valor real y el terico supera el 40% y el valor real no llega al 30 %. En este caso, la salida TRI del bloque de funcin admite dos impulsos de posicionado similares. Cada impulso de posicionado tiene una duracin de tmax. Al finalizar el ajuste del regulador se retorna a la anterior modalidad de servicio del circuito de regulacin. Ajuste automtico del regulador para arranque en fro
SP PV tmax tmax
Ajuste automtico del regulador para arranque en fro
tmax/2
TRI
START
1
1 2 3
Modalidad de servicio automtico o manual Modalidad de servicio de ajuste automtico del regulador Modalidad de servicio automtico o manual
33002250
51
AUTOTUNE: Ajuste automtico del regulador
Ajuste automtico del regulador para arranque en caliente
Si no se cumple la condicin para un ajuste automtico del regulador para arranque en fro, se realizar el ajuste para arranque en caliente: a la salida se le aplica un impulso de posicionado seguido de un impulso de posicionado en la direccin opuesta. Cada etapa tiene una duracin de tmax. Una vez concluido el ajuste automtico del regulador, se retornar a la anterior modalidad de servicio del circuito de regulacin: Ajuste automtico del regulador para arranque en caliente
tmax/2 tmax tmax
SP PV
TRI START
1
1 2 3
Modalidad de servicio automtico o manual Modalidad de servicio de ajuste automtico del regulador Modalidad de servicio automtico o manual
52
33002250
AUTOTUNE: Ajuste automtico del regulador
Principio de identificacin
Proceso de identificacin El proceso de identificacin consta de 3 etapas: un anlisis de estabilidad y ruido del proceso de regulacin un primer anlisis de la reaccin a un impulso de posicionado que representa el primer modelo de identificacin: basndose en esta primera estimacin se crea un filtro que se utilizar en la ltima fase en un segundo anlisis de la reaccin a un segundo impulso de posicionado se obtienen datos ms precisos gracias al filtro de datos
Finalmente, se crea un modelo completo del proceso. Si los resultados de las dos fases anteriores estn muy separados entre s, la estimacin se desechar y el ajuste automtico del regulador habr fracasado. Principio de regulacin Despus de cada una de las dos fases se crea un juego de parmetros para el regulador que hay que ajustar. Las ecuaciones de las que se obtienen los parmetros de regulacin se basan en el factor de amplificacin y en la relacin entre el tiempo de reaccin y el retardo del proceso. El algoritmo debe ser capaz de resistir la modificacin del factor de amplificacin y de la constante temporal en una relacin 2 sin perder estabilidad. Los procesos asimtricos se admiten si cumplen esta condicin. En caso contrario, en el diagnstico diag. se mostrar un error.
33002250
l l l
53
AUTOTUNE: Ajuste automtico del regulador
Parametrizacin
Parametrizacin del impulso de posicionado En el ajuste automtico del regulador se conectan dos impulsos de posicionado a la salida TRI. Un impulso de posicionado se identifica mediante dos parmetros. su duracin (tmax) y su amplitud (step_ampl). Los rangos de valores para estos parmetros son: tmax mayor de 4 segundos y step_ampl mayor que el 1 % de la escala de salida (out_inf, out_sup). La funcin tambin supervisa que la salida TRI no rebase los valores lmites de la escala de salida. La comprobacin se efecta al iniciar el ajuste automtico del regulador. La siguiente tabla incluye los valores de los parmetros para algunas clases tpicas de regulacin:
Esquema Caudal o presin de lquido Presin de gas Nivel Temperatura o presin de vapor Composicin tmax (s) 5-30 60-300 120-600 600-3600 600-3600 step_ampl (%) 10-20 10-20 20 30-50 30-50
ndice de rendimiento: perf
El regulador se puede modular en funcin del valor del ndice de rendimiento. El ndice de rendimiento perf oscila entre 0 y 1, lo que permite estabilizar el parmetro perf cerca de 0 o alcanzar una regulacin ms dinmica (y, por tanto, optimizar el tiempo de reaccin a las magnitudes de perturbacin) si se ajusta perf ms cerca de 1.
54
33002250
AUTOTUNE: Ajuste automtico del regulador
Inicio del ajuste automtico del regulador: START
Si este bit se pone a 1, la funcin estar activada. Al final del proceso de ajuste, el usuario deber volver a poner este bit a cero. Si en este momento se est realizando el ajuste automtico, la puesta a cero del bit hace que se detenga la funcin. Los parmetros PARA_C conservarn el ltimo valor an activo. En el ejemplo mostrado abajo, el programa restaur el bit START al final del proceso de ajuste. Ejemplo para iniciar el ajuste automtico del regulador
F_TRIG
Fc3542_trs
CLK
MOVE EN ENO
Fc3542_atstart_w
AUTOTUNE
Fc3542_pv Fc3542_sp Fc3542_out Fc3542_atprev_w Fc3542_para_autotune Fc3542_tr_input Fc3542_trk
PV SP RCPY START PREV PARA TR_I TR_S
PV_O SP_O PARA_C
Fc3542_para_pidff
TRI TRS INFO STATUS
Fc3542_trs Fc3542_info_autotune
33002250
55
AUTOTUNE: Ajuste automtico del regulador
Retorno al ajuste anterior: PREV
La modificacin del valor de este bit permite cambiar entre el parmetro actual y el anterior con la condicin de que en ese momento dado no se est efectuando ninguna regulacin (dos modificaciones seguidas de este bit darn como resultado la configuracin inicial). Para el regulador del tipo PIDFF se aplican los siguientes parmetros de estructura Info_AUTOTUNE:
Elemento de la estructura de datos p1_prev p2_prev p3_prev Significado KP TI TD
Para el regulador del tipo PI_B se aplican los siguientes parmetros de estructura Info_AUTOTUNE:
Elemento de la estructura de datos p1_prev p2_prev Significado KP TI
Diagnstico para el ajuste automtico del regulador: diag
Los datos de diagnstico del ajuste automtico del regulador se almacenan en una palabra doble. El valor de esta palabra se conserva hasta que se reinicie el ajuste automtico del regulador. Obtendr ms datos acerca de esta palabra doble en la seccin Diagnstico.
56
33002250
AUTOTUNE: Ajuste automtico del regulador
Acoplamiento del regulador
Ejemplo de aplicacin con un EFB del tipo de regulador PIDFF El siguiente diagrama es un ejemplo de aplicacin de un EFB AUTOTUNE con un EFB del tipo de regulador FIDFF:
AUTOTUNE TT2_PV TT2_SP TC2_OUT TC2_START TC2_PREV TC2_AT_PARA TC2_TRI TC2_TRS PV SP RCPY START PREV PARA TR_I TR_S PV_O SP_O PARA_C PIDFF PV OUT SP OUTD FF RCPY MAN_AUTO MA_O PARA INFO TR_I STATUS TR_S TC2_OUT
TC2_PARA TC2_MAN_AUTO
TRI TRS INFO STATUS
El EFB AUTOTUNE EFB se intercambia con el parmetro del regulador: El acceso a los parmetros del regulador se realiza a travs de la conexin entre la salida PARA_C del bloque de funcin AUTOTUNE y la entrada PARA del regulador. La salida PARA_C es del tipo ANY y permite la conexin de EFB AUTOTUNE a distintos tipos de reguladores (PIDFF o PI_B). Adems, el EFB AUTOTUNE y el regulador se reparten las siguientes variables encadenables: PV, SP, TR_I y TR_S. Estas variables representan las entradas AUTOTUNE que conducen a las salidas correspondientes para permitir la conmutacin de las entradas del regulador. Si el ajuste automtico del regulador est activo, la salida TRS pasa a 1 y la magnitud de posicionado se establece en la salida TRI. La funcin de esta salida es conectarse a las entradas TRI_I y TR_S de los siguientes bloques de funcin AUTOTUNE. De esta forma, se pueden ajustar a la modalidad de servicio Tracking (PIDFF, PI_B, MS,...). Ejemplo de conexin: Circuito de regulacin con un regulador PID simple En esta seccin nos ocuparemos del ajuste automtico de un nico regulador (el caso ms habitual). El regulador puede ser del tipo PI_B o PIDFF. El EFB AUTOTUNE necesita los parmetros de escala del regulador (parmetro de estructura PARA_C) pv_inf, pv_sup, out_inf, out_sup, as como el tipo de estructura del regulador indicado por el bit mix_par. El EFB genera a partir de ah los parmetros del regulador PID (KP, TI, TD). La direccin de accin del regulador (rev_dir) se comprueba durante la prueba del ajuste automtico del regulador y se compara con el signo de los factores de amplificacin del modelo. Si hubiera incompatibilidades, se indicar un error para el parmetro "diag.".
33002250
57
AUTOTUNE: Ajuste automtico del regulador
Ejemplo de conexin: Circuito de regulacin con regulador PID simple y bloque de funcin MS
Si el circuito de regulacin contiene un EFB MS, la estructura puede tener el siguiente aspecto:
AUTOTUNE TT18_PV TT18_SP TC18_OUT TC18_START TC18_PREV TC_PARA PV SP RCPY START PREV PARA TR_I TR_S PV_O SP_O PARA_C PIDFF PV OUT SP OUTD FF RCPY MAN_AUTO MA_O PARA INFO TR_I STATUS TR_S
TC18_PARA TC18_OUT 1
TRI TRS INFO STATUS
MS OUT IN FORC OUTD MA_FORC MA_O MAN_AUTO STATUS PARA TR_I TR_S TC18_OUT
Al iniciar el ajuste automtico del regulador, el EFB AUTOTUNE ajusta el bloque de funcin MS a la modalidad de servicio Tracking, controlando as directamente la salida del circuito de regulacin. La utilizacin de las entradas RCPY de los bloques AUTOTUNE y PIDFF permite la continuacin del circuito de regulacin sin problemas.
Modalidades de servicio
Modalidades de servicio Las distintas modalidades de servicio del ajuste automtico del regulador y las prioridades aplicables se definen en la siguiente tabla:
Modalidad de servicio Tracking Ajuste automtico del regulador TR_S 1 0 START 01 1
Al finalizar el ajuste automtico del regulador, la salida TRS se ajusta a cero y, por tanto, hace que el circuito de regulacin vuelva a la modalidad de servicio anterior (manual o automtica). Si fracasa el ajuste automtico del regulador, la variable TRI retornar al valor vigente antes del inicio del ajuste automtico del regulador y el circuito de regulacin volver a la modalidad de servicio anterior.
58
33002250
AUTOTUNE: Ajuste automtico del regulador
Diagnstico
Vista general del diagnstico Puede haber distintos motivos para que no se pueda iniciar el ajuste automtico del regulador, se cancele o falle. Es posible que, dependiendo de la causa del fallo, se ofrezca un juego de parmetros. Cada bit de la palabra de diagnstico diag permite crear un tipo de error. Esta palabra contiene la actual modalidad de servicio del ajuste automtico del regulador. Se explican los siguientes casos: Estado del ajuste automtico del regulador, p. 60 Causas de un inicio fallido, p. 61 Causas de la interrupcin del ajuste automtico del regulador, p. 62 Realizacin de una prueba despus de finalizar el ajuste automtico del regulador, p. 64 En esta tabla encontrar el significado del elemento diag de la estructura de datos Info_AUTOTUNE
Bit Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1 Bit 5 = 1 Bit 6 = 1 Bit 7 = 1 Bit 8 = 1 Bit 9 = 1 Bit 10 = 1 Bit 11= 1 Bit 12 = 1 Bit 13 = 1 Bit 14 = 1 Bit 15 = 1 Bit 16 = 1 Significado Ajuste automtico del regulador en proceso Ajuste del regulador cancelado Error de parmetros Modificacin de los parmetros que se estn ajustando automticamente en este momento Parada debida a un error del sistema Saturacin del valor real Modificacin demasiado pequea Intervalo de exploracin no vlido Reaccin incomprensible Medicin no estabilizada en el inicio Duracin del impulso de posicionado (tmax) demasiado corta Ruido medido demasiado fuerte Duracin del impulso de posicionado (tmax) demasiado larga Proceso con gran rebasamiento de los valores lmite Proceso sin mnimo de fase Proceso asimtrico Proceso con componente integral
Palabra de diagnstico
33002250
l l l l
59
AUTOTUNE: Ajuste automtico del regulador
Estado del ajuste automtico del regulador
Vista general Los siguientes bits de la palabra de diagnstico (elemento diag) muestran el estatus del ajuste automtico del regulador.
Bit 0 1 Significado 1 = Ajuste automtico del regulador en proceso 1 = Ajuste automtico del regulador suspendido
Bit 0 del elemento diag Bit 1 del elemento diag
Este bit muestra que el ajuste del regulador funciona. Al finalizar el ajuste del regulador o al suspenderse mediante el bit START se ubica a 0. Este bit muestra que el usuario ha suspendido la ltima regulacin mediante el bit START o ajustando la modalidad de servicio Tracking.
60
33002250
AUTOTUNE: Ajuste automtico del regulador
Causas de un inicio fallido
Vista general Los siguientes bits de la palabra de diagnstico (elemento diag) muestran un inicio fallido:
Bit 2 7 Significado 1 = error de parmetros 1 = intervalo de exploracin incorrecto
Bit 7 del elemento diag
33002250
l l l
Bit 2 del elemento diag
Las siguientes causas pueden llevar a un inicio fallido : Duracin demasiado dbil del impulso de posicionado (tmax < 4 s), Amplitud demasiado dbil (step_ampl < 1% del rango de salida), protocolo no aplicable: si la salida actual + n x amplitud de la secuencia del impulso de posicionado (n = 1 en el ajuste del arranque en caliente y n = 2 en el ajuste del arranque en fro) se encuentra fuera del rango de salida (out_inf, out_sup), el protocolo de prueba no se podr utilizar. El valor de ajuste de step_ampl debe ser compatible con el punto de trabajo actual. Si el intervalo de exploracin es demasiado grande en comparacin con la duracin del impulso de posicionado (> tmax / 25) la el examen de la respuesta no ser suficientemente preciso y se bloquear el ajuste del regulador. Este caso es tpico de los procesos de regulacin muy rpidos (tmax mayor que el tiempo de estabilizacin del proceso, del orden de algunos segundos). En este caso se puede aumentar tmax, ya que el algoritmo apenas reacciona a este parmetro (en comparacin 1 con 3), o ajustar el intervalo de exploracin correspondiente.
61
AUTOTUNE: Ajuste automtico del regulador
Causas de la interrupcin del ajuste automtico del regulador
Vista general Los siguientes bits de la palabra de diagnstico (elemento diag) muestran las causas de la interrupcin del ajuste automtico del regulador.
Bit 3 4 5 6 8 Significado 1 = Modificacin de parmetros durante el ajuste del regulador 1 = Interrupcin debido a un fallo del sistema 1 = Saturacin del valor real 1 = Crecimiento demasiado pequeo 1 = reaccin ilgica
Bit 3 del elemento diag Bit 4 del elemento diag
Si el parmetro tmax o step_ampl se modifica durante el ajuste del regulador, ste se interrumpir. El ajuste automtico del regulador se interrumpir cuando existe un fallo de sistema en SPS que impide la secuenciacin completa de la cadena de secuencias. La desconexin interrumpe de forma automtica el funcionamiento en caso de retorno de la tensin. Si el valor de medicin sobrepasa el rango de medicin (pv_inf, pv_sup), el ajuste automtico del regulador se interrumpir y el regulador se ajustar a la modalidad de servicio anterior. Una estimacin del valor de medicin permite interrumpir el ajuste automtico del regulador antes de que el rango de medicin se vea sobrepasado (cuando se identifica un primer modelo).
Bit 5 del elemento diag
62
33002250
AUTOTUNE: Ajuste automtico del regulador
Bit 6 del elemento diag
Esta figura muestra el comportamiento durante un crecimiento demasiado pequeo:
PV
PV < 2 %
La amplitud del impulso de posicionado es demasiado pequea para influir en el proceso. En este caso se puede aumentar el valor de step_ampl. Bit 8 del elemento diag Esta figura muestra el comportamiento durante una reaccin ilgica:
PV
La reaccin del proceso de regulacin es incomprensible (factores de refuerzo con distintos signos). Esto puede llevar a una perturbacin importante, a un acoplamiento con otros circuitos reguladores, etc.
33002250
63
AUTOTUNE: Ajuste automtico del regulador
Realizacin de una prueba despus de finalizar el ajuste automtico del regulador
Vista general
Los siguientes bits de la palabra de diagnstico (elemento diag) muestran el estatus del ajuste automtico del regulador:
Bit 9 10 11 12 13 14 15 16 Significado 1 = Valor de medida no estabilizado al principio 1 = Duracin del impulso de posicionado (tmax) demasiado corta 1 = Ruido de medicin demasiado alto 1 = Duracin del impulso de posicionado (tmax) demasiado larga 1 = Gran rebasamiento del valor de medida 1 = Proceso sin mnimo de fase 1 = Proceso asimtrico 1 = Proceso integrador
Bit 9 del elemento diag
Esta figura muestra el comportamiento de un valor de medida no estabilizado al principio:
PV
El ajuste automtico del regulador se lleva a cabo aunque el valor de medida no era estable. Si la modificacin del valor de medida es mayor que la reaccin del impulso de posicionado, los resultados de la prueba sern falsos.
64
33002250
AUTOTUNE: Ajuste automtico del regulador
Bit 10 del elemento diag
Esta figura muestra el comportamiento en caso de una duracin demasiado corta del impulso de posicionado:
PV
t
1 2 Impulso de posicionado de prueba Reaccin del proceso
La reaccin no se estabiliza antes del retorno a la magnitud de posicionado del principio. Los parmetros calculados son por lo tanto falsos.
Bit 11 del elemento diag
Esta figura muestra el comportamiento en caso de ruido de medicin demasiado alto : PV
La reaccin del proceso ante el impulso de posicionado no es suficiente en comparacin con el nivel de ruido de medicin. El valor de medicin tiene que filtrarse o aumentar step_ampl.
33002250
65
AUTOTUNE: Ajuste automtico del regulador
Bit 12 del elemento diag
Esta figura muestra el comportamiento en caso de una duracin demasiado larga del impulso de posicionado: PV
tmax determina la frecuencia a tomar en consideracin para las mediciones que sirven para el clculo de los coeficientes. tmax debe comprender entre 1 y 5 veces el tiempo de crecimiento del proceso de regulacin.
Bit 13 del elemento diag
Se pone este bit si la reaccin ante un impulso de posicionado sobrepasa con mucho (overshoot) el valor de medida (ms del 10%). El proceso no se corresponde con los modelos procesados por el algoritmo. Este bit se ubica si la reaccin ante un impulso de posicionado lleva a una inversin de la reaccin en la fase inicial (undershoot mayor del 10%). El proceso no se corresponde con los modelos procesados por el algoritmo.
Bit 14 del elemento diag
66
33002250
AUTOTUNE: Ajuste automtico del regulador
Bit 15 del elemento diag
Esta figura muestra el comportamiento durante un proceso asimtrico: PV
La reaccin del proceso es asimtrica. El juego de parmetros finales se corresponde con un compromiso entre las reacciones durante el aumento o la disminucin. En ambos casos se trata de prestaciones medianas. Si el criterio elegido es la duracin de la reaccin en el crecimiento, habr que tener en cuenta el primer parmetro. Para ello, durante la fase de retorno a la magnitud inicial de posicionado habr que desconectar el ajuste automtico del regulador. Si el criterio elegido es la duracin de disminucin, habr que utilizar una amplitud negativa.
Bit 16 del elemento diag
Esta figura muestra el comportamiento durante un proceso integrador: PV
El proceso comprende una componente integral o el tmax es demasiado pequeo y el proceso, asimtrico. Los coeficientes calculados corresponden al proceso integrador con amplificacin de la integracin. Si ste no es el caso, reiniciar una regulacin automtica del regulador despus de haber aumentado tmax.
33002250
67
AUTOTUNE: Ajuste automtico del regulador
Error de tiempo de ejecucin
Palabra de estado
Los bits de la palabra de estado tienen el siguiente significado:
Bit Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1 Bit 7 = 1 Bit 8 = 1 Bit 9 = 1 Bit 10 = 1 Significado Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de coma flotante Divisin por cero en el clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante El parmetro perf est fuera del rango [0,1]: El bloque de funcin utiliza para el clculo el valor 0 1. Los valores lmite pv_inf y pv_sup del regulador que se va a ajustar son idnticos La salida PARA_C no est conectada a los parmetros de un regulador que se puede ajustar automticamente El ajuste automtico del regulador ha fallado El ltimo ajuste automtico del regulador se ha realizado con xito
Aviso de error
Este error aparece si en una entrada se detecta un valor no flotante, si en un clculo en valores con coma flotante se presenta un problema o si los valores lmite pv_inf y pv_sup del regulador son idnticos. En este caso, no se modificarn las salidas del bloque de funcin. Aparecer una advertencia de que el parmetro perf est fuera del rango [0,1]. En este caso, el bloque puede utilizarse para calcular tanto el valor 0 como el valor 1.
Advertencia
68
33002250
COMP_DB: Comparacin
5
Vista general
Introduccin Contenido:
Este captulo describe el bloque COMP_DB Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 70 70 71 72
33002250
69
COMP_DB: Comparacin
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin COMP_DB permite la comparacin de los dos valores numricos IN1 y IN2. Dependiendo de si IN1 es mayor, igual o menor que IN2, el bloque de funcin pondr a 1 una de las salidas GREATER, EQUAL o LESS. El bloque de funcin tiene en cuenta tambin una zona de insensibilidad y una histresis. Se pueden proyectar EN y ENO como parmetros adicionales.
Representacin
Smbolo
Representacin del bloque
COMP_DB
REAL REAL REAL REAL
IN1 IN2 DBAND HYST
GREATER EQUAL LESS
BOOL BOOL BOOL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros IN1 IN2 DBAND HYST GREATER EQUAL LESS Tipo de datos REAL REAL REAL REAL BOOL BOOL BOOL Significado Entrada n 1 Entrada n 2 Zona de insensibilidad Histresis Marca de mayor Marca de igual Marca de menor
70
33002250
COMP_DB: Comparacin
Descripcin detallada
Zona de insensibilidad
El parmetro DBAND permite establecer una zona de insensibilidad en la que la variacin entre IN1 y IN2 se considerar como cero. Si la variacin entre IN1 y IN2 est dentro de esta zona, la salida EQUAL se pondr a 1. Establecimiento de la zona de insensibilidad
GREATER 1 -DBAND 0 1 DBAND LESS IN1-IN2 -DBAND 1 0 DBAND IN1-IN2 EQUAL
Histresis
El parmetro HYST permite generar un efecto de histresis si disminuye la variacin entre IN1 y IN2: partiendo de un estado en el que la salida GREATER o LESS adopta el valor 1, la salida EQUAL adoptar el valor 1 si la variacin IN1 - IN2 es menor que DBAND - HYST. Generacin de un efecto de histresis
GREATER 1 -DBAND 0 DBAND 1 LESS IN1-IN2 -DBAND HYST 1 0 DBAND IN1-IN2 EQUAL HYST
33002250
71
COMP_DB: Comparacin
Funcin de comparacin clsica (DBAND = 0 y HYST = 0
GREATER 1 0 IN1-IN2 -1 LESS 1 0 IN1-IN2 EQUAL
Error de tiempo de ejecucin
Aviso de error
Advertencia
72
l l l l l
DBAND = 0 y HYST = 0
En este caso, el bloque se comporta como una funcin de comparacin clsica: Si IN1 es continuamente mayor que IN2, entonces GREATER = 1 Si IN1 es igual que IN2, entonces EQUAL = 1 Si IN1 es menor que IN2, entonces LESS = 1
Este error aparecer si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. En este caso las salidas GREATER, EQUAL y LESS permanecern sin variacin. Se generar un mensaje de advertencia cuando: El parmetro DBAND es negativo: el bloque de funcin utilizar entonces DBAND = 0 para realizar el clculo. El parmetro HYST est fuera del rango [0, DBAND]: el bloque de funcin utilizar para el clculo el siguiente valor correcto, es decir, 0 si HYST es menor que 0, y DBAND si HYST es mayor que DBAND.
33002250
COMP_PID: Regulador PID avanzado
Vista general
Introduccin Contenido:
Este captulo describe el bloque COMP_PID. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Diagrama de estructura del regulador PID avanzado Parametrizacin del regulador COMP_PID Antiwindup para COMP_PID Seleccin del tipo de regulador para COMP_PID Conmutacin de modalidad de servicio sin brusquedad Seleccin de la modalidad de servicio del COMP_PID Frmulas detalladas Error de tiempo de ejecucin Pgina 74 75 78 79 82 83 84 88 91 93
33002250
73
COMP_PID: Regulador PID avanzado
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa un regulador PID avanzado, concebido especialmente para el tratamiento de cascadas. La estructura del regulador se representa en el Diagrama de estructura, p. 78 . Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin tiene las siguientes propiedades: Regulador PID real con ajuste independiente de gain, ti, td Modalidades de servicio Manual, Detenido, Automtico, Cascada, Reseteado, Ajuste de valor manual Limitacin de crecimiento para servicio manual Ajuste del seguimiento del valor manual Limitacin de crecimiento para los valores de guiado Conmutacin manual/automtico sin brusquedad Limitacin de magnitudes de posicionado Componentes P, I y D conectables en forma independiente y sin brusquedad Modificacin de la amplificacin sin brusquedad Se puede elegir entre Reseteado Antiwindup o Detencin Antiwindup Desplazamiento de los lmites Antiwindup con respecto a los lmites de posicionado Medida Antiwindup slo si est activa la componente I Tiempo de retardo de la componente D definible Componente D conmutable a magnitud de regulacin PV o diferencia de regulacin ERR Zona de insensibilidad con reduccin de la amplificacin Punto de trabajo externo (en servicio P, PD y D) Conmutacin Manual/Automtico seleccionable con y sin brusquedad
Explicacin de las magnitudes
Magnitud YD YI YP Significado Componente D (solamente en caso de en_d = 1) Componente I (solamente en caso de en_i = 1) Componente P (solamente en caso de en_p = 1)
74
Funcin de transferencia
l l l l l l l l l l l l l l l l l
La funcin de transferencia es: 1 td s G(s) = gain 1 + ----------- + ---------------------------------ti s 1 + td_lag s
YD YI YP
33002250
COMP_PID: Regulador PID avanzado
Representacin
Smbolo
Representacin del bloque:
COM_PID
REAL REAL REAL Mode_COMP_PID Para_COMP_PID REAL REAL REAL REAL
SP Y PV ERR SP_CAS STATUS MODE PARA YMAN SP_CAS_N YRESET YMAN_N FEED_FWD OFF_N OFF
REAL REAL Stat_COMP_PID
REAL REAL REAL
Descripcin de parmetros COMP_PID
Descripcin de parmetros del bloque
Parmetros SP PV SP_CAS MODE PARA YMAN YRESET FEED_FWD OFF Y ERR STATUS SP_CAS_N YMAN_N OFF_N Tipo de datos REAL REAL REAL Mode_COMP_PID Para_COMP_PID REAL REAL REAL REAL REAL REAL Stat_COMP_PID REAL REAL REAL Significado Magnitud de guiado Magnitud de regulacin Magnitud de guiado para cascada Modalidad de servicio Parmetros Valor de posicionado manual Valor de reseteado de la magnitud de posicionado Entrada de la magnitud de perturbacin Offset para el servicio P/PD Magnitud de posicionado Diferencia de regulacin Estado de salida Magnitud de guiado para cascada Valor de posicionado manual Offset para el servicio P/PD
33002250
75
COMP_PID: Regulador PID avanzado
Descripcin de parmetros Mode_COMP_ PID
Descripcin de la estructura de datos
Elemento r man halt cascade en_p en_i en_d d_on_pv halt_aw bump ymanc Tipo de datos BOOL BOOL BOOL BOOL BOOL BOOL BOOL BOOL BOOL BOOL BOOL Significado "1": Modalidad de servicio Reseteado "1": Modalidad de servicio Manual "1": Modalidad de servicio Detenido "1": Modalidad de Cascada "1": Componente P conectada "1": Componente I conectada "1": Componente D "1": Componente D en magnitud de regulacin; "0": Componente D en diferencia de regulacin "1": Detencin Antiwindup "0": Reseteado Antiwindup "0": Modificacin sin brusquedad de la modalidad de servicio "1": Seguimiento YMAN
Descripcin de parmetros Para_COMP_PID
Descripcin de la estructura de datos
Elemento gain ti td td_lag db gain_red rate_sp rate_man ymax ymin delt_aw Tipo de datos REAL TIME TIME TIME REAL REAL REAL REAL REAL REAL REAL Significado Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Tiempo de adelantamiento de valor terico Tiempo de retardo de la componente D Zona de insensibilidad Reduccin de la amplificacin en la zona de insensibilidad (db) Velocidad de crecimiento del valor terico (SP) [1/s] Velocidad de crecimiento del valor de posicionado manual (YMAN) [1/s] Valor lmite superior para Y Valor lmite inferior para Y Ampliacin de los lmites para Antiwindup
76
33002250
COMP_PID: Regulador PID avanzado
Descripcin de parmetros Stat_COMP_PID
Descripcin de la estructura de datos
Elemento st_r st_man st_halt st_auto st_cascade st_max st_min Tipo de datos BOOL BOOL BOOL BOOL BOOL BOOL BOOL Significado "1": COMP_PID se encuentra en la modalidad de servicio Reseteado "1": COMP_PID se encuentra en la modalidad de servicio Manual "1": COMP_PID se encuentra en la modalidad de servicio Detenido "1": COMP_PID se encuentra en la modalidad de servicio Automtico "1": COMP_PID se encuentra en la modalidad de servicio Cascada "1": Y Para_COMP_PID.ymax "1": Y Para_COMP_PID.ymin
33002250
77
COMP_PID: Regulador PID avanzado
Diagrama de estructura del regulador PID avanzado
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del regulador COMP_PID
a) SP rate_sp b) 0 1 cascade SP_CAS + -db db 1 0 c) sp_intern gain P
gain
d) PV 1 0
YMAN rate_man FEED_FWD
en_p e)
ERR a)
b) 1 0 0 c) 1 ti I + +
Reseteado Antiwindup YP + YI 1 halt_aw + + YD ymax ymin st_max Servicio control de la modalidad Y + 0 AWMAX AWMIN
YP + td, td_lag 0 1 0 d) d_on_pv OFF 1 0 en_i e) YRESET en_d 1 D +
st_min
78
33002250
COMP_PID: Regulador PID avanzado
Parametrizacin del regulador COMP_PID
Parametrizacin
La estructura del regulador COMP_PID se representa en el Diagrama de estructura, p. 78. La parametrizacin del bloque de funcin se efecta en primer lugar a travs de los parmetros PID puros, es decir, la amplificacin proporcional gain, la constante de tiempo de posicionado ti y tiempo de adelantamiento de valor terico td. La componente D se retarda con el tiempo td_lag. La relacin entre td/td_lag se denomina amplificacin diferenciada y se selecciona por lo general entre 3 y 10. Se puede formar la componente D, ya sea basndose en la diferencia de regulacin ERR (d_on_pv =0) o en la magnitud de regulacin PV (d_on_pv = 1). Si se determina la componente D sobre la base de la magnitud de regulacin PV, no existir ningn salto debido a la componente D, en caso de modificaciones en las magnitudes de guiado (modificaciones en la entrada SP). Dicha componente D se manifiesta solamente en el caso de perturbaciones y modificaciones en el proceso.
Nota: El EFB dispone de 3 parmetros E/S (SP_CAS, OFF, YMAN), que se actualizan por s mismos a travs de la funcin en el modo cascada. Si desea utilizar el bloque en servicio cascada, deber establecer la unin entre estas entradas y las correspondientes salidas (SP_CAS_N, OFF_N, YMAN_N) a travs de variables.
Inversin del sentido de regulacin
Se puede lograr un comportamiento inverso del regulador cambiando el signo antepuesto en gain. Un valor positivo en gain, hace que la magnitud de posicionado aumente en el caso de una magnitud de perturbacin positiva. Un valor negativo en gain, hace que la magnitud de posicionado disminuya en el caso de una magnitud de perturbacin positiva.
33002250
79
COMP_PID: Regulador PID avanzado
En la modalidad de servicio Automtico, se forma la diferencia de regulacin a travs de sp_intern y PV, en la cual sp_intern alcanza el valor del parmetro SP a travs de un limitador de crecimiento. La magnitud de guiado interna sp_intern se lleva hasta el valor del parmetro SP en forma de rampa, con la velocidad de crecimiento determinada mediante el parmetro rate_sp (unidad 1/s). La cantidad se evala a partir del parmetro rate_sp. Si es rate_sp = 0, estar desconectada la funcin del limitador de crecimientos para SP. SP se transferir directamente a sp_intern. En las modalidades de servicio Reseteado, Manual y Detenido, la diferencia de regulacin es dependiente del estado del parmetro cascade. Si es cascade=1, se ajustar sp_intern al valor del parmetro PV, y ERR ser entonces 0. Si es cascade=0, y se encuentra ajustado el servicio sin brusquedad (bump=0), se ajustar sp_intern al valor del parmetro SP. En otro caso (bump=1), tambin aqu se ajustar sp_intern al valor del parmetro PV.
Reduccin de la amplificacin en caso de una diferencia de regulacin pequea
El parmetro db indica el tamao de una zona de insensibilidad, en la cual no se encuentra activa la amplificacin proporcional gain completa, sino un valor reducido por el parmetro gain_red. El parmetro db afecta a la diferencia de regulacin ERR = SP - PV en la forma representada en la figura Representacin de la zona de insensibilidad, p. 81. Por medio de la zona de insensibilidad se pueden reducir las cargas innecesarias de los elemento de posicionado a causa de pequeas perturbaciones de la magnitud de regulacin o ruido de medicin. Se debe ingresar un valor positivo del parmetro db. Para gain_red se deben ingresar valores entre 0 y 1.
Guiado del valor manual YMAN
80
l l
Formacin de la diferencia de regulacin
En la modalidad de servicio Cascada, se forma la diferencia de regulacin ERR a travs de SP_CAS y PV: sp_intern = SP_CAS ERR = sp_intern - PV
En las modalidades de servicio Automtico y Cascada, la entrada YMAN ser guiada por el valor de la magnitud de posicionado Y, cuando se encuentre conectada la modalidad de servicio Valor Manual-Guiado (ymanc = 1), o sea, regir: YMAN = Y. Si se encuentra desconectada la modalidad de servicio Valor ManualGuiado ( ymanc = 0), el valor en YMAN permanecer sin variacin.
33002250
COMP_PID: Regulador PID avanzado
Representacin de la zona de insensibilidad
Zona de insensibilidad:
Y db ERR
sp_intern ERR
+ -
PV
db YN
1 1 2 Pendiente 1 Pendiente gain_red
Limitacin de magnitudes de posicionado
Los valores ymax e ymin limitan la magnitud de posicionado tanto hacia arriba como hacia abajo. De esta forma rigen ymin Y ymax. . Cuando se alcanzan los valores lmites o una limitacin del valor de la magnitud de posicionado se visualizar a travs de ambos elementos st_max y st_min. st_max = 1 cuando Y ymax st_min = 1 cuando Y ymin.
33002250
l l
El lmite superior ymax para la limitacin del valor de la magnitud de posicionado deber seleccionarse mayor que el lmite inferior ymin.
81
COMP_PID: Regulador PID avanzado
Antiwindup para COMP_PID
Definicin
A travs de la medida Antiwindup se asegura, que la componente integral no se haga demasiado grande y se bloquee el regulador si ha permanecido demasiado tiempo en un lmite de posicionado. Esta medida Antiwindup se ejecutar solamente en caso de que est activa la componente I del regulador. Los lmites para la medida Antiwindup son, de forma standard, las magnitudes de posicionado del regulador (delt_aw = 0). Pero a travs del parmetro delt_aw se pueden aumentar (delt_aw > 0) o reducir (delt_aw < 0) los lmites con respecto a los lmites de posicionado (ymax, ymin). Por lo tanto, los lmites utilizados para la medida Antiwindup son: AWMAX = ymax + delt_aw AWMIN = ymin - delt_aw Especialmente para seales muy ruidosas, se puede lograr, mediante el desplazamiento de los lmites de Antiwindup con respecto a los lmites de posicionado, que la magnitud de posicionado Y no 'salte permanentemente por fuera' del lmite de posicionado (accin de la componente D en caso de perturbaciones) y a continuacin regrese hacia dentro de la posicin de lmite (accin de la componente I en caso de diferencia de regulacin ERR 0). Si los lmites de posicionado deben regir simultneamente para la medida Antiwindup, se deber elegir el parmetro delt_aw = 0. Mediante valores negativos en delt_aw se puede lograr que los lmites para el Antiwindup sean ms pequeos que los lmites de posicionado (conveniente para la detencin Antiwindup).
Reseteado Antiwindup (halt_aw = 0)
Detencin Antiwindup (halt_aw = 1)
82
l l
La componente D no se tiene en cuenta para la medida Antiwindup, de forma que los picos provocados por esta componente D no se recortarn a travs de dicha medida Antiwindup. La medida de reseteado Antiwindup corrige la componente I de tal forma, que rija: AWMIN YP + FEED_FWD + YI AWMAX. Para la medida Antiwindup se tiene en cuenta solamente la componente I. Cuando se encuentran conectados la detencin Antiwindup y la componente I, la medida Antiwindup corrige la componente I de tal forma que rija: AWMIN YI AWMAX. Los parmetros rate_sp y rate_man representan limitadores de crecimiento para los valores manuales SP e YMAN (vase aqu tambin el bloque de funcin VLIM). Mediante el valor 0 ( rate_sp = 0 o bien, rate_man = 0), se desconecta la funcin del correspondiente limitador de crecimientos. Los valores SP e YMAN se utilizarn entonces sin retardo.
33002250
COMP_PID: Regulador PID avanzado
Seleccin del tipo de regulador para COMP_PID
Tipos de reguladores
Existen diferentes tipos de reguladores que se seleccionan a travs de los parmetros en_p, en_i y en_d.
Tipo de regulador Regulador P Regulador PI Regulador PD Regulador PID Regulador I en_p 1 1 1 1 0 en_i 0 1 0 1 1 en_d 0 0 1 1 0
La componente I tambin se puede desconectar por medio de ti = 0. Tambin se puede desconectar la componente D a travs de td = 0.
Influencia del parmetro OFF
Si se encuentra conectada la componente I (en_i = 1), se calcular la magnitud de posicionado Y a travs de la adicin de las componentes YP, YI, YD y FEED_FWD. El Offset no interviene en el clculo en el caso de encontrarse conectada la componente I. Pero si se encuentra desconectada la componente I (en_i = 0), se formar la magnitud de posicionado mediante la adicin de las componentes YP, YD, FEED_FWD y el Offset OFF.
Nota: El parmetro OFF est previsto solamente para los reguladores P, D, o PD.
33002250
83
COMP_PID: Regulador PID avanzado
Conmutacin de modalidad de servicio sin brusquedad
Tipo de conmutacin Conmutacin sin brusquedad con componente I conectada
La conexin y desconexin de las diversas componentes (P, I, D) se realiza sin brusquedad. Si se conecta o desconecta la componente P, se corregir la componente I interna por el valor de la componente P. De esta manera se logra una conexin y desconexin sin brusquedad de esta componente P, incluso si la diferencia de regulacin es distinta de cero. Si se desconecta la componente D, la componente I interna adoptar el valor de la componente D restante. Si se conecta la componente D, su componente se pondr a 0.
Conmutacin sin brusquedad con componente D desconectada
La conmutacin sin brusquedad con componente D desconectada se realizar solamente si el parmetro es bump = 0. En este caso se utiliza el parmetro OFF para lograr una conmutacin sin brusquedad. Si se conecta o desconecta la componente P, se corregir la componente I interna por el valor de la componente P. De esta manera se logra una conexin y desconexin sin brusquedad de esta componente P, incluso si la diferencia de regulacin es distinta de cero. Si se desconecta la componente D, se le sumar el valor del parmetro OFF a la componente D restante. Si se conecta la componente D, el valor de su componente se pondr a 0 (OFF permanece sin variacin).
Conmutacin sin brusquedad de la componente I
La desconexin sin brusquedad de la componente I se realizar solamente si el parmetro es bump = 0. En este caso se utilizar tanto el parmetro OFF, como la componente I (YI) interna para lograr la conmutacin sin brusquedad.
84
33002250
COMP_PID: Regulador PID avanzado
Conmutacin sin brusquedad de un regulador PI(D)- a P(D)
El concepto fundamental para una conmutacin sin brusquedad de un regulador PI(D) a un P(D) se basa en la suposicin de que el regulador PI(D) ha alcanzado un estado esttico. En este caso, el proceso ha alcanzado su estado de reposo. Aqu tiene la componente I un valor especfico. Entonces, para poder conmutar sin brusquedad al servicio P(D), tendra que servir la componente I del regulador PI(D) como punto de trabajo (Offset) para el regulador PD, de forma que la conmutacin pueda tener lugar sin procesos de compensaciones (nueva estabilizacin). Basndose en el concepto anterior, la desconexin sin brusquedad de la componente I se realizar de tal manera, que el parmetro OFF tome el valor de dicha componente. Valor de la magnitud de posicionado Y en funcin de en_i:
Si ... en_i = 1 en_i = 0 Entonces ... Y = YP + YI + YD + FEED_FWD Y = YP + OFF + YD + FEED_FWD
Conexin de la componente I
La conexin de la componente I se basa en un concepto similar. La componente I interna se ubica en el valor del parmetro OFF. De esta manera se puede conectar la componente I sin que aparezcan procesos de compensacin.
Nota: Si se calcula el parmetro OFF por medio de un bloque de funcin previo (salida de un EFB o DFB, p. ej. MOVE), las correcciones para una conmutacin sin brusquedad quedarn sin efecto (lo ms tarde, cuando se procese ese bloque de funcin).
33002250
85
COMP_PID: Regulador PID avanzado
Ejemplo de una conmutacin sin brusquedad de la componente D
Si se requiere la realizacin de la conmutacin sin brusquedad del regulador P(D), as como tambin modificar el parmetro OFF a travs del programa de aplicacin, se podr tomar como base el siguiente ejemplo.
.1.6(2)
OR_BOOL
mkpid.en_i change_off FBI_1_4(3) mvlim.man
VLIM
new_off mvlim pvlim off
FBI_1_2(4) off sp pv sp_cas mkpid pkpid yman yreset 0.0
X MODE PARA YMAN
Y STATUS
COMP_PID Y SP PV ERR SP_CAS STATUS MODE PARA YMAN SP_CAS_N YRESET YMAN_N FEED_FWD OFF_N OFF
y err skpid
sp_cas yman off
En este ejemplo se lleva el parmetro OFF a travs de un limitador de crecimiento VLIM en forma de rampa hasta el valor de la variable new_off, por medio de la velocidad de crecimiento indicada en pvlim.rate.
86
33002250
COMP_PID: Regulador PID avanzado
Notas acerca del ejemplo
Es importante en este ejemplo la utilizacin de la variable off, tanto en la entrada YMAN del VLIM, as como tambin en la salida Y del VLIM, y la conexin de la salida de VLIM con la entrada OFF del COMP_PID. La conexin entre la salida Y de VLIM y la entrada OFF de COMP_PID hace que el bloque de funcin VLIM sea procesado antes que el COMP_PID (esto es una condicin previa para el funcionamiento correcto). Mientras se encuentre conectada la modalidad de servicio Manual (mvlim.man = 1) en el VLIM, se transmitir el valor manual del bloque de funcin VLIM al parmetro OFF del COMP_PID. El bloque de funcin COMP_PID puede modificar ahora el contenido de las variables para un tratamiento sin brusquedad. En el ciclo siguiente este valor modificado se encontrar tambin a disposicin en la entrada YMAN del bloque de funcin VLIM. En un momento adecuado, se podr entonces desconectar la modalidad de servicio Manual en el bloque de funcin VLIM y el bloque de funcin modificar, siguiendo una rampa, el valor de la variable off desde su valor actual hasta el valor de new_off. En el ejemplo mencionado arriba se controla la conexin del valor manual en el bloque de funcin OR_BOOL. Mientras el COMP_PID tenga conectada la componente I (mkpid.en_i = 1) permanecer el bloque de funcin VLIM en la modalidad de servicio Manual.
Nota: Si es mkpid.en_i = 1, entonces el parmetro OFF de COMP_PID no intervendr en ningn caso en el clculo de la salida de COMP_PID.
En el ejemplo mencionado arriba se necesita en el bloque de funcin OR_BOOL una segunda condicin adicional, para modificar off a new_off: La variable change_off tiene que ser 1.
Modificacin de la amplificacin sin brusquedad
La modificacin de la amplificacin proporcional gain tiene lugar sin brusquedad. Igual que en la conexin o desconexin de las modalidades de servicio, se llevar a cabo internamente una correccin para este efecto. Si se encuentra conectada la componente I (en_i = 1 y ti > 0), se corregir la componente I interna por el salto esperado en la componente P, provocado por la modificacin de la amplificacin. Si se encuentra desconectada la componente I, se corregir el valor en el parmetro OFF por el salto esperado en la componente P, si el parmetro es bump = 0. Si es bump = 1, no se modificar OFF y una modificacin de la amplificacin del regulador P(D) conducir a procesos de compensacin.
33002250
87
COMP_PID: Regulador PID avanzado
Seleccin de la modalidad de servicio del COMP_PID
Modalidades de servicio
Existe cinco modalidades de servicio, que se pueden seleccionar a travs de r, man, halt y cascade.
Modalidad de servicio Reset Manual Detenido Cascada Automtico r 1 0 0 0 0 man 10 1 0 0 0 halt 10 10 1 0 0 cascade 10 10 10 1 0
Modalidades de servicio Automtico y Cascada
En la modalidad de servicio Automtico, se determina la magnitud de posicionado Y a travs de algoritmos PID discretos, dependiendo de la magnitud de regulacin X y de la magnitud de guiado SP. En la modalidad de servicio Cascada, se determina la magnitud de posicionado Y a travs de algoritmos PID discretos, dependiendo de la magnitud de regulacin X y de la magnitud de guiado SP_CAS. Ambas modalidades de servicio Automtico y Cascada se distinguen externamente solamente por la distinta utilizacin de la magnitud de guiado SP. SP_CAS rige para Cascada, SP para todas las restantes modalidades de servicio (con limitacin de crecimiento). La magnitud SP_CAS es una entrada solamente en la modalidad de servicio Cascada, y en todas las dems modalidades de servicio es una salida. En las modalidades de servicio Reseteado, Manual, Detenido o Automtico, as como tambin en la fase de arranque, se entregar la magnitud X de vuelta al regulador de guiado en SP_CAS, para permitir una conmutacin sin brusquedad entre, p. ej., regulacin de valor fijo a regulacin en cascada. En ambas modalidades de servicio, se limita la magnitud de posicionado Y a travs de ymax e ymin. Para la medida Antiwindup se pueden ampliar los lmites de posicionado a travs del parmetro delt_aw.
88
33002250
COMP_PID: Regulador PID avanzado
Modalidad de servicio Manual
En la modalidad de servicio Manual, se transmite el valor de posicionado manual YMAN mediante un limitador de crecimientos a la magnitud de posicionado Y. Dicha magnitud de posicionado Y se guiar con la velocidad de crecimiento determinada en el parmetro rate_man (unidad 1/s), siguiendo una rampa, al valor del parmetro YMAN. La cantidad se evaluar por medio del parmetro rate_man. Si es rate_man = 0, estar desconectada la funcin del limitador de crecimientos para YMAN. YMAN se transmitir directamente a la magnitud de posicionado. La magnitud de posicionado se limita a travs de ymax e ymin. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). La medida Antiwindup est implementada como en el servicio Automtico. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
Modalidad de servicio Reseteado
En la modalidad de servicio Reseteado, se transmite el valor de Reseteado YRESET en forma firme a la magnitud de posicionado Y. La magnitud de posicionado se limita a travs de ymax e ymin. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). La medida Antiwindup est implementada como en el servicio Automtico. En la modalidad de servicio Detenido, la magnitud de posicionado permanecer tal y como se encontraba, o sea, el bloque de funcin no modifica la magnitud de posicionado Y (el regulador se detiene). Las magnitudes internas sern guiadas de tal forma, que el regulador contine su marcha sin brusquedad a partir de su posicin actual. La limitacin de las magnitudes de posicionado y la medida Antiwindup estn implementadas como en el servicio Automtico. La modalidad de servicio Detenido es apropiada, entre otras cosas, para ajustar la magnitud de posicionado Y a travs de un mando externo, siendo guiadas correctamente las componentes internas en el regulador. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
Modalidad de servicio Detenido
33002250
89
COMP_PID: Regulador PID avanzado
Servicio no sin brusquedad (bump = 0)
El servicio no sin brusquedad se define de tal manera, que el regulador, en caso de conmutacin de modalidad de servicio (p. ej., de Manual a Automtico), presenta un salto en la magnitud de posicionado Y debido a la componente P. Dependiendo del campo de aplicacin del regulador, puede ser conveniente que, en el caso de una conmutacin, p. ej. de Manual a Automtico, el regulador corrija la magnitud de posicionado de un salto, cuando la diferencia de regulacin sea distinta de 0. La altura de ese salto se corresponde con la componente P del regulador, y es de: YP = ERR x gain
Servicio sin brusquedad (bump = 1)
El servicio sin brusquedad se define de tal manera, que el regulador, en caso de una conmutacin de la modalidad de servicio, no presenta en el guiado de la magnitud de posicionado ninguna parte discontinua. Eso significa, que l debe continuar su marcha sin ningn salto desde el lugar exacto en el cual se encontraba ltimamente. En esta modalidad de servicio se corrige la componente interna I por la componente P. Si no se encuentra conectada ninguna componente I, se lograr el servicio sin brusquedad al ajustar el punto de trabajo OFF de tal forma, que el regulador pueda continuar su marcha sin brusquedad en caso de un cambio de modalidad de servicio a pesar de una diferencia de regulacin diferente de 0.
90
33002250
COMP_PID: Regulador PID avanzado
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las siguientes frmulas:
Magnitud Significado Diferencia de tiempo entre el ciclo actual y el anterior La diferencia de regulacinde creacin interna actual Valor de la diferencia de regulacin del ciclo de exploracin actual Valor de la diferencia de regulacin del ciclo de exploracin anterior Magnitud de perturbacin (solamente en los reguladores P, D o PD) Offset Valor de la magnitud de regulacin del ciclo de exploracin actual Valor de la magnitud de regulacin del ciclo de exploracin anterior Salida actual (modalidad de servicio Detenido) o YMAN (modalidad de servicio manual) Componente D (solamente en caso de en_d = 1) Componente I (solamente en caso de en_i = 1) Componente P (solamente en caso de en_p = 1)
dt ERR ERR ( new ) ERR ( old )
FEED_FWD OFF
PV ( new ) PV ( old )
Y YD YI YP
Magnitud de posicionado
La magnitud de posicionado se compone de diferentes magnitudes parciales que dependen de las modalidades de servicio:
Y = YP + YI + YD + OFF + FEED_FWD
Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir:
ymin Y ymax
33002250
91
COMP_PID: Regulador PID avanzado
Componente P YP para todas las modalidades de servicio
Componente I YI para la modalidad de servicio Automtico
Componente I YI para la modalidad de servicio Manual y Detenido
92
l l l l l
Vista general para el clculo de las componentes de regulacin
A continuacin encontrar una vista general de los diferentes clculos de las componentes de regulacin dependiendo de los elementos en_p, en_i y en_d: Componente P YP para las modalidades de servicio Manual, Detenido, Automtico y Cascada Componente I para la modalidad de servicio Automtico Componente I YI para la modalidad de servicio Manual y Detenido Componente D YD para las modalidades de servicio Automtico y Cascada Componente D YD para la modalidad de servicio Manual y Detenido El YP para la modalidad de servicio Manual, Detenido, Automtico y Cascada se averigua de la siguiente forma: Para en_p = 1 rige:
YP = gain ERR Para en_p = 0 rige: YP = 0
El YI para la modalidad de servicio Automtico se averigua de la siguiente forma: Para en_i = 1 rige:
dt ERR ( new ) + ERR ( old ) YI ( ne w ) = YI ( old ) + gain ---- ----------------------------------------------------ti 2
Para en_i = 0 rige:
YI = 0 La componente I se forma de acuerdo a la regla del trapecio.
El YI para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: Para en_i = 1 rige:
YI = Y ( YP FEED_FWD )
Para en_i = 0 rige:
YI = 0
33002250
COMP_PID: Regulador PID avanzado
Componente D YD para las modalidades de servicio Automtico y Cascada
El YD para la modalidad de servicio Automtico y Cascada se averigua de la siguiente forma: Para en_d = 1 y d_on_pv = 0 rige:
YD ( old ) td_lag + td gain ( ERR ( ne w ) ERR ( old ) ) YD ( new ) = ---------------------------------------------------------------------------------------------------------------------------------------dt + dt_lag
Para en_d = 1 y d_on_pv = 1 rige:
YD ( old ) td_lag + td gain ( PV ( ol d) PV ( ne w ) ) YD ( new ) = ------------------------------------------------------------------------------------------------------------------------------dt + dt_lag
Para en_d = 0 rige:
YD = 0 Componente D YD para la modalidad de servicio Manual y Detenido
El YD para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma:
YD = 0
Error de tiempo de ejecucin
Aviso de error
Se efectuar un aviso de error, si existe un nmero de coma flotante no vlido en la entrada PV gain_red es > 1 o gain_red es < 0 db es < 0 ymax es < ymin
33002250
l l l l
93
COMP_PID: Regulador PID avanzado
94
33002250
DEADTIME: Unidad de tiempo muerto
Vista general
Introduccin Contenido:
Este captulo describe el bloque DEADTIME. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Modalidades de servicio Ejemplo del comportamiento del bloque de funcin Error de tiempo de ejecucin Pgina 96 97 98 99 99
33002250
95
DEADTIME: Unidad de tiempo muerto
Descripcin breve
Descripcin de funcionamiento
Mediante este bloque de funcin se retarda una seal de entrada en un tiempo, el llamado tiempo muerto. Dicho bloque de funcin retarda la seal X en el tiempo muerto T_DELAY, antes de ser entregada de nuevo a Y. Este bloque de funcin tiene una posibilidad de almacenamiento (bfer) para 128 valores de X sucesivos, o sea, durante el tiempo T_DELAY se podrn guardar 128 valores de X. El bfer se tratar segn las diferentes modalidades de servicio. El valor de Y permanecer inalterado despus de un arranque en fro o en caliente del sistema. Los valores internos se ajustarn al valor de X. Despus de un arranque en fro o en caliente del sistema, o despus de una modificacin del tiempo muerto T_DELAY, la salida READY ser igual a "0". Esto significa: sin preparar, bfer vaco. El bloque de funcin dispone de las siguientes modalidades de servicio: Manual Detenido Automtico. Se pueden proyectar EN y ENO a modo de parmetros adicionales.
Nota: El tiempo de retardo contina contando incluso si el bloque se bloquea por medio del parmetro EN, debido a que el bloque calcula sus diferencias de tiempo a travs del reloj del sistema.
Frmula
96
l l l
La funcin de transferencia es:
G(s) = e
s T_D ELAY
33002250
DEADTIME: Unidad de tiempo muerto
Representacin
Smbolo
Representacin del bloque
DEADTIME
REAL Mode_MH TIME REAL
X MODE T_DELAY YMAN
Y READY
REAL BOOL
Descripcin del parmetro DEADTIME
Descripcin de parmetros del bloque
Parmetros X MODE T_DELAY YMAN Y READY Tipo de datos REAL Mode_MH TIME REAL REAL BOOL Significado Valor de entrada Modalidad de servicio Tiempo muerto Valor de posicionado manual Salida "1" = Bfer interno lleno "0" = Bfer interno no lleno (p. ej., despus de un arranque en caliente/fro o modificacin del tiempo muerto)
Descripcin de parmetros Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
33002250
97
DEADTIME: Unidad de tiempo muerto
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los elementos "man" y "halt":
Modalidad de servicio Automtico Manual Detenido man 0 1 0 halt 0 01 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico, el mdulo de funcin opera segn las siguientes reglas:
Si ... T_De lay ---------------------Tiempo de ciclo > 128 Entonces ... el valor actual de X se transmite al bfer y el valor ms antiguo de X del bfer se entrega en la salida Y. En el caso de un tiempo de ciclo mayor que T_DELAY / 128, resultar una resolucin menor que 128 y surgir un error sistemtico, es decir, algunos valores de X se guardarn por duplicado (vase el siguiente ejemplo). no se pueden depositar todos los valores X en el bfer. En este caso, en algunos ciclos no se guardar el valor de X. Por esta razn, la salida Y permanecer invariable despus de transcurrir el tiempo T_DELAY en dos (o ms) ciclos consecutivos.
Tiempo de ciclo <
T_De lay ---------------------128
Ejemplo de la modalidad de servicio Automtico
En el ejemplo se suponen los siguientes valores: Tiempo de ciclo = 100 ms T_DELAY = 10 s tin = T_DELAY / 128 = 78 ms Dado que el tiempo de lectura tin es menor que el tiempo de ciclo, en el bfer se aceptan todos los valores de X. No obstante, en la cuarta ejecucin del mdulo de funcin (despus de 400 ms), el valor de X se guardar dos veces en lugar de una (porque 3 x 78 = 312 y 4 x 78 = 390).
98
33002250
DEADTIME: Unidad de tiempo muerto
Modalidad de servicio Manual
En la modalidad de servicio Manual se transmite el valor manual YMAN a la salida Y. El bfer interno se completa con el valor manual YMAN. El bfer se marca como lleno (READY = 1). En la modalidad de servicio Detenido, la salida Y se detiene en el ltimo valor calculado. La salida ya no se modifica, pero el usuario puede sobrescribirla. No obstante, contina el procesamiento del bfer interno como en la modalidad de servicio Automtico.
Modalidad de servicio Detenido
Ejemplo del comportamiento del bloque de funcin
Ejemplo
El siguiente diagrama muestra un ejemplo del comportamiento del bloque de funcin. La entrada X se modifica en forma de rampa desde un valor a otro nuevo y la salida Y le sigue a la entrada X retardada por el tiempo muerto T_DELAY. Diagrama del bloque de funcin DEADTIME
T_DELAY
Error de tiempo de ejecucin
Aviso de error
Aparecer un aviso de error si existe un nmero de coma flotante no vlido en la entrada YMAN o X.
33002250
99
DEADTIME: Unidad de tiempo muerto
100
33002250
DELAY: Unidad de tiempo muerto
8
Vista general
Introduccin Contenido:
Este captulo describe el bloque DELAY. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Modalidades de servicio Ejemplo del comportamiento del bloque de funcin Pgina 102 103 104 106
33002250
101
DELAY: Unidad de tiempo muerto
Descripcin breve
Descripcin de funcionamiento
Con este bloque de funcin se retarda una seal de entrada por un tiempo muerto. Dicho bloque de funcin retarda la seal X en el tiempo muerto T_DELAY, antes de ser entregada de nuevo a Y. Este bloque de funcin tiene un bfer de retardo para 128 elementos (valores de X), o sea, durante el tiempo T_DELAY se pueden guardar 128 valores de X. El bfer se tratar segn las diferentes modalidades de servicio. El valor de Y permanecer inalterado despus de un arranque en fro o en caliente del sistema. Los valores internos se ajustarn al valor de X. Despus de un arranque en fro o en caliente del sistema, o despus de una modificacin del tiempo muerto T_DELAY, la salida READY ser igual a "0". Esto significa: sin preparar, debido al bfer vaco. El bloque de funcin dispone de las siguientes modalidades de servicio: Manual, Detenido y Automtico. Se pueden proyectar EN y ENO a modo de parmetros adicionales.
Nota: El tiempo de retardo contina contando incluso si el bloque se bloquea por medio del parmetro EN, debido a que el bloque calcula sus diferencias de tiempo a travs del reloj del sistema.
102
33002250
DELAY: Unidad de tiempo muerto
Representacin
Smbolo
Representacin del bloque
DELAY
BOOL BOOL REAL TIME REAL
MAN HALT X T_DELAY YMAN
Y READY
REAL BOOL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros MAN HALT X T_DELAY YMAN Y READY Tipo de datos BOOL BOOL REAL TIME REAL REAL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido Valor de entrada Tiempo muerto Valor de posicionado manual Salida "1" = Bfer interno lleno "0" = Bfer interno no lleno (p. ej., despus de un arranque en caliente/fro o una modificacin del tiempo muerto)
33002250
103
DELAY: Unidad de tiempo muerto
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT.
Modalidad de servicio Automtico Manual Detener MAN 0 1 0 HALT 0 01 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico el bloque de funcin opera segn las siguientes reglas:
Si ... T_De lay ---------------------Tiempo de ciclo > 128 Entonces ... el valor actual de X se transmite al bfer y el valor ms antiguo de X del bfer se entregar en la salida Y. En el caso de un tiempo de ciclo mayor que T_DELAY / 128, resulta una resolucin menor que 128 y se llega a un error sistemtico, o sea, algunos valores de X se guardarn dobles (vase el siguiente ejemplo). no se podrn depositar todos los valores X en el bfer. En este caso, no se guardar el valor de X en algunos ciclos, e Y permanecer en esos ciclos sin variacin.
Tiempo de ciclo <
T_De lay ---------------------128
Ejemplo de la modalidad de servicio Automtico
En el ejemplo se suponen los siguientes valores: Tiempo de ciclo = 100 ms T_DELAY = 10 s tin = T_DELAY / 128 = 78 ms Debido a que el tiempo de lectura es menor que el tiempo de ciclo, cada valor X se aplicar en el bfer. Pero en la cuarta ejecucin del bloque de funcin (despus de 400 ms) el valor de X se guardar dos veces en lugar de una (porque 3 x 78 = 312 y 4 x 78 = 390).
Modalidad manual
En la modalidad de servicio Manual se transmite el valor manual YMAN a la salida Y. El bfer interno se llena con el valor manual YMAN. El bfer se marcar como lleno (READY = 1).
104
33002250
DELAY: Unidad de tiempo muerto
Modalidad de servicio Detenido
En la modalidad de servicio Detenido se mantendr la salida Y en el ltimo valor calculado. La salida ya no se modificar, pero el usuario la podr sobrescribir. No obstante, el bfer interno se continuar procesando como en la modalidad de servicio Automtico.
33002250
105
DELAY: Unidad de tiempo muerto
Ejemplo del comportamiento del bloque de funcin
Ejemplo
El siguiente diagrama muestra un ejemplo del comportamiento del bloque de funcin. La entrada X se modifica en forma de rampa desde un valor a otro nuevo y la salida Y le sigue a la entrada X retardada por el tiempo muerto T_DELAY. Diagrama del bloque de funcin DELAY
T_DELAY
106
33002250
DERIV: Diferenciador con alisamiento
Vista general
Introduccin Contenido:
Este captulo describe el bloque DERIV. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Frmulas Descripcin detallada Ejemplo del bloque de funcin Error de tiempo de ejecucin Pgina 108 109 110 111 112 112
33002250
107
DERIV: Diferenciador con alisamiento
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa una unidad de diferenciacin con una salida Y retardada por una constante de tiempo lag. El bloque de funcin dispone de las siguientes modalidades de servicio: Manual, Detenido y Automtico. Se pueden proyectar EN y ENO a modo de parmetros adicionales.
108
33002250
DERIV: Diferenciador con alisamiento
Representacin
Smbolo
Representacin del bloque
DERIV
REAL Mode_MH Para_DERIV REAL
X MODE PARA YMAN
REAL
Descripcin del parmetro DERIV
Descripcin de parmetros del bloque
Parmetros X MODE PARA YMAN Y Tipo de datos REAL Mode_MH Para_DERIV REAL REAL Significado Magnitud de entrada Modalidades de servicio Parmetros Valor de posicionado manual Salida diferenciador con alisamiento
Descripcin de parmetros Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
Descripcin de parmetros Para_COMP_PID
Descripcin de la estructura de datos
Elemento gain lag Tipo de datos REAL TIME Significado Amplificacin de la diferenciacin Constante de tiempo de retardo
33002250
109
DERIV: Diferenciador con alisamiento
Frmulas
Funcin de transferencia
La funcin de transferencia para Y es:
s lag G(s) = gain ------------------------1 + s lag
Frmula de clculo para Y
La frmula de clculo para Y es:
lag Y = ------------------ ( Y ( old ) + gain ( X ( new ) X ( ol d) ) ) dt + lag
Caso especial: lag = 0
Se trata en este caso de una diferenciacin pura sin unidad de retardo de primer orden. En este caso la funcin de transferencia es:
G(s) = gain s
La frmula para el clculo es:
X ( new ) X ( old ) Y = gain ------------------------------------dt Significado de las magnitudes
A continuacin encontrar el significado de las magnitudes de las frmulas:
Magnitud Significado el valor de la entrada X del ciclo actual el valor de la entrada X del ciclo anterior el valor de la salida Y del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
X ( new ) X ( old ) Y ( old ) dt
110
33002250
DERIV: Diferenciador con alisamiento
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin tiene lugar mediante la determinacin de la amplificacin gain del diferenciador y de la constante de tiempo lag con la cual se retarda la salida Y. Para tiempos de exploracin muy cortos y para la entrada de un escaln unitario en la entrada X (salto en la entrada X de 0 a 1.0), la salida Y saltar al valor gain (valor terico - real un poco ms pequeo, debido a que el tiempo de exploracin no puede ser infinitamente pequeo), para luego retornar nuevamente a 0 con la constante de tiempo lag.
Modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidad de servicio Automtico Manual Detenido man 0 1 0 halt 0 01 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". La entrada YMAN se transmitir a la salida Y. La salida Y se mantendr en el ltimo valor calculado. La salida ya no se modificar, pero el usuario la podr sobrescribir.
33002250
111
DERIV: Diferenciador con alisamiento
Ejemplo del bloque de funcin
Ejemplo DERIV
En el ejemplo siguiente se representa la respuesta a escaln del bloque de funcin DERIV. Respuesta a escaln con gain = 1 y lag = 10 s
X YMAN Y
halt 0 man 1 0
Error de tiempo de ejecucin
Aviso de error
Aparecer un aviso de error si existe un nmero de coma flotante no vlido en la entrada YMAN o X.
112
33002250
DTIME: Retardo
10
Vista general
Introduccin Contenido:
Este captulo describe el bloque DTIME. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Parametrizacin Inicializaciones y modalidades de servicio Ejemplo de medicin de un caudal de paso Error de tiempo de ejecucin Pgina 114 115 116 119 120 122
33002250
113
DTIME: Retardo
Descripcin breve
Descripcin de funcionamiento
El bloque de funcinDTIME genera un retardo durante la transferencia de la magnitud numrica de entrada IN. La magnitud numrica de salida OUT genera el mismo comportamiento que la magnitud numrica de entrada incluyendo el retardo T_DELAY, que puede variar. Comportamiento del bloque de funcin DTIME:
OUT IN
t T_DELAY
Se pueden proyectar EN y ENO a modo de parmetros adicionales.
Frmula
Este bloque de funcin implementa la siguiente funcin de transferencia:
G(p) = e
p.T_DELAY
114
33002250
DTIME: Retardo
Representacin
Smbolo
Representacin del bloque
DTIME
REAL TIME REAL BOOL
IN T_DELAY TR_I TR_S
OUT BUFFER STATUS
REAL ANY WORD
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros IN T_DELAY TR_I TR_S OUT BUFFER STATUS Tipo de datos REAL TIME REAL BOOL REAL ANY*) WORD Significado Valor digital que se debe retardar Retardo deseado Entrada de inicializacin Comando de inicializacin Salida retardada Memoria, en la cual se depositan los valores retardados. Palabra de estado
*) Es fundamental que este parmetro est unido a una variable (vase "Parametrizacin, p. 116").
33002250
115
DTIME: Retardo
Parametrizacin
Guardar los valores de entrada (salida BUFFER)
La salida BUFFER se debe unir a una variable (por lo general del tipo Buffer_DTIME). Los valores que se deben retardar se depositarn en esta variable. Cada vez que se ejecute el bloque de funcin se guardar un nuevo valor para la entrada IN. La magnitud de la variable vinculada a la salida BUFFER determinar el nmero de valores que se pueden guardar y, por lo tanto, tambin el valor mximo que puede adoptar el retardo:
T_DELAY maximum = n T_Period
En este caso es vlido:
Magnitud de la frmula n T_PERIOD Significado Cantidad de valores de coma flotante que puede contener el BUFFER Intervalo de exploracin del bloque de funcin
Nota: En cuanto se conecte una variable a la salida BUFFER slo se podr sustituir por otra variable del mismo tipo. Para poder sustituirla por otra variable mayor, con la cual se puedan alcanzar p. ej. valores de retardo ms altos, deber borrarse el bloque de funcin y se deber crear uno nuevo.
Tipo de datos de la salida del bfer
La salida del BUFFER es del tipo ANY. Esto significa, que se le puede asignar cualquier tipo de variable. En principio es una ventaja utilizar en primer lugar una variable del tipo Buffer_DTIME. En este caso se trata de una tabla que puede contener hasta 100 valores de desalizamiento. Por medio de este tipo de variable se puede alcanzar un retardo que se corresponda con 100 veces el intervalo de exploracin del bloque de funcin DTIME.
116
33002250
DTIME: Retardo
Procedimiento en caso de grandes tiempos de retardo
Para alcanzar valores de retardo que se correspondan con ms de 100 veces el intervalo de exploracin del bloque de funcin, se deber asignar una variable mayor al parmetro BUFFER:
Paso 1 2 3 Accin Defina un nuevo tipo de datos derivado, p. ej., una tabla con 200 valores de coma flotante Declare una variable de este tipo y vinclela al parmetro BUFFER del bloque de funcin DTIME El retardo mximo se corresponde con 100 veces el intervalo de exploracin del bloque de funcin.
33002250
117
DTIME: Retardo
Modificacin dinmica del retardo T_DELAY
Es posible aumentar o disminuir el tiempo de retardo T_DELAY durante la ejecucin del programa. Si el tiempo de retardo recin ajustado es compatible con la magnitud de la salida BUFFER, el nuevo retardo ser efectivo inmediatamente. Representacin de la modificacin dinmica del retardo T_DELAY
Aumento de T_DELAY Disminucin de T_DELAY
OUT IN
Nuevo valor de T_DELAY Nuevo valor de T_DELAY
t
Valor inicial de T_DELAY
Si el valor de T_DELAY es demasiado grande en relacin a la magnitud BUFFER, no ser posible guardar suficientes valores de entrada, para poder alcanzar el retardo deseado. En este caso el retardo permanecer en la mayor duracin posible (el bit 8 de la palabra de estado pasar a continuacin a 1). Para evitar este problema se recomienda atribuir las dimensiones de tal forma a la variable asignada al parmetro BUFFER, que se pueda contar con un posible aumento del retardo T_DELAY. Si T_DELAY = 0, la salida OUT se corresponder siempre con la entrada IN.
118
33002250
DTIME: Retardo
Inicializaciones y modalidades de servicio
Inicializaciones y modalidades de servicio
En la primera ejecucin del bloque de funcin (al cargar el programa o la llamada online) se inicializarn todos los valores que contenga el BUFFER con el valor de TR_I. La salida OUT conservar este valor por el tiempo de duracin del retardo T_DELAY. Si la entrada TR_I no est conectada el valor 0 servir para la inicializacin de la salida del BUFFER; la salida OUT conservar el valor 0 durante el retardo T_DELAY. En la modalidad de servicio Tracking (TR_S = 1) se conducir la entrada TR_I a la salida OUT y la salida BUFFER se inicializar tambin con el valor de TR_I. Tras regresar a la modalidad de servicio Normal, la salida conservar este valor por el tiempo de duracin de T_DELAY, tal y como fue el caso durante el primer ciclo.
33002250
119
DTIME: Retardo
Ejemplo de medicin de un caudal de paso
Medicin de un caudal de paso
El bloque de funcin DTIME sirve, p. ej., para modelar un retardo del proceso, que se puede proyectar, entre otras cosas, durante la medicin de caudales de paso o revoluciones de sistemas de traccin. En el siguiente ejemplo se vertern de forma consecutiva dos productos, A y B, en un depsito y se mezclarn. El depsito se situar en primer lugar bajo la instalacin dosificadora para el producto A, que emitir la cantidad P1. A continuacin se trasladar por medio de una cinta de transporte hasta la instalacin dosificadora para el producto B, que emitir la cantidad P2. El intervalo de tiempo entre ambas instalaciones dosificadoras es de 20 s. Medicin de caudales de paso
A B
P1
P1 + P2
20 s
La cantidad del producto P2 se regula, pero la medicin del peso en el depsito resulta P1+P2. P1 se debe restar. La cantidad P2 se corresponde con la cantidad medida restndole la cantidad P1 dosificada 20 s antes. La medicin de la cadena cerrada en P2 se corresponde por tanto con el siguiente esquema:
FBI_9_1(1) DTIME PV_A T_DELAY IN T_DELAY TR_I TR_S OUT BUFFER STATUS PV_A_DELAY BUFF PV_AB IN1 IN2 IN3 PARA FBI_9_2(2) SUM_W OUT PV_B
SUM_PARA
120
33002250
DTIME: Retardo
Valores de los elementos de la estructura de datos de la variable SUM_PARA:
Elemento de SUM_PARA SUM_PARA.K1 SUM_PARA.K2 Valor 1 1
33002250
121
DTIME: Retardo
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit Bit 0 = 1: Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 8 = 1 Significado Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante T_DELAY sobrepasa el valor mximo que se puede alcanzar a travs de la salida del BUFFER
Aviso de error
Este error aparecer si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. En este caso las salidas OUT y BUFFER permanecern sin variacin. Se emitir una alarma si T_DELAY sobrepasa el valor mximo posible. En este caso el bloque de funcin utilizar el valor mximo. Si se desea un valor que sobrepase el valor de retardo, solamente ser necesario vincular la salida del BUFFER con una variable mayor.
Alarma
122
33002250
FGEN: Generador de funciones
11
Vista general
Introduccin Contenido:
Este captulo describe el bloque FGEN. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Parametrizacin Seleccin de la funcin Definicin de la funcin Diagramas de las distintas funciones Casos especiales Cronogramas Pgina 124 125 126 127 128 131 135 136
33002250
123
FGEN: Generador de funciones
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin FGEN representa un generador de funciones. Genera en la salida Y una forma de seal definida en la estructura de datos Para_FGEN. Dicho bloque de funcin se puede disponer en forma de cascada, o sea, en el caso de usarse varios de estos EFBs, se pueden generar y solapar diversas formas de seales. Se pueden generar las 8 siguientes formas de seales: Funcin escaln Funcin rampa Funcin triangular Funcin diente se sierra Funcin rectangular Funcin trapezoidal Funcin senoidal Nmero casual Se pueden proyectar EN y ENO a modo de parmetros adicionales.
124
l l l l l l l l
33002250
FGEN: Generador de funciones
Representacin
Smbolo
Representacin del bloque
FGEN
BOOL BOOL Para_FGEN REAL
R START PARA YOFF
Y ACTIVE N
REAL BOOL INT
Descripcin de parmetros FGEN
Descripcin de parmetros del bloque
Parmetros R START PARA YOFF Y ACTIVE N Tipo de datos BOOL BOOL Para_FGEN REAL REAL BOOL INT Significado "1": Resetear 1": Arrancar el generador de funciones Parmetros Offset para la salida Y Salida del generador de funciones ACTIVE = 1: El generador de funciones est activo Cantidad de perodos desde el arranque
Descripcin de parmetros Para_FGEN
Descripcin de la estructura de datos
Elemento func_no amplitude halfperiod t_off t_rise t_acc unipolar Tipo de datos INT REAL TIME TIME TIME TIME BOOL Significado Seleccin de la funcin (1- 8) del generador Amplitud de la funcin Duracin de medio perodo Desconexin de la constante de tiempo Constante de tiempo de crecimiento Tiempo de recorrido de bucle "1 "= Seal unipolar "0" = Seal bipolar
33002250
125
FGEN: Generador de funciones
Parametrizacin
Reset
El parmetro R significa RESET. Si este parmetro est ajustado (R = 1), se interrumpir inmediatamente toda funcin en ejecucin y se entregar a la salida Y el valor del parmetro YOFF (Offset). Al mismo tiempo se resetear (se pondr a 0) el contador para la cantidad de perodos N y ACTIVE se pondr a "0". Por medio del parmetro START se arranca la funcin definida a travs de la estructura de datos (START = 1). Con el comienzo de un nuevo perodo se incrementa la salida N. Si se vuelve a poner a 0 el parmetro START, se procesar hasta el final el perodo comenzado de la funcin seleccionada. Mientras se ejecute la funcin la salida ACTIVE estar a 1. Cuando finalice el perodo se resetear tambin la salida ACTIVE a 0. Las seales generadas mediante el generador de funciones tienen una amplitud del valor de "amplitude", o sea, el rango de validez se extiende de -"amplitude" hasta "amplitude" en caso de servicio bipolar (unipolar = 0) o bien, de 0 hasta "amplitude" en caso de servicio unipolar (unipolar = 1). A travs del parmetro YOFF se puede desplazar esta funcin con respecto del punto cero.
Nota: Si se conecta al parmetro YOFF la salida de otro generador de funciones, se sobrepondrn las seales que generen ambos generadores de funciones.
Arranque del generador de funciones
Offset
Tiempo de crecimiento t_rise
El tiempo de crecimiento t_rise slo se utilizar en las funciones "rampa" y "trapecio". En el caso de la funcin "Diente de sierra" resulta el tiempo de crecimiento de halfperiod - t_off. En el caso de la funcin "Tringulo" resulta el tiempo de crecimiento de 0.5 *(halfperiod - t_off).
126
33002250
FGEN: Generador de funciones
Seleccin de la funcin
Seleccin
Se pueden generar en total 8 funciones con el generador de funciones. La seleccin de la funcin tiene lugar a travs de func_no. En caso de un cambio de funcin, siempre se procesar solamente de forma completa la ltima funcin seleccionada. Se admiten los siguientes nmero de funciones:
func_no 1 2 3 4 5 6 7 8 Funcin Salto Rampa Diente de sierra Tringulo Rectngulo: Trapecio Seno Nmero casual
33002250
127
FGEN: Generador de funciones
Definicin de la funcin
Definicin
La funcin se define completamente en la estructura de datos Para_FGEN. En primer lugar se debe determinar la forma de seal (vase Seleccin de la funcin, p. 127). Como tipo bsico para la definicin se seleccionar el trapecio (tringulo, diente de sierra, rectngulo) unipolar / bipolar.
Y t_acc
amplitude
amplitude
t_rise t_acc t_rise halfperiod
t_off
amplitude
En el parmetro amplitude se determinar la amplitud de la funcin. Aqu se debe tener en cuenta, que estos datos son vlidos para el servicio unipolar. En el caso del servicio bipolar, la amplitud se compone de amplitude y -amplitude, o sea, es el doble de grande. El parmetro halfperiod define la duracin de medio perodo. El parmetro t_off define un tiempo de desconexin (tiempo de reposo). Un medio perodo de la funcin se entregar a continuacin dentro del tiempo halfperiod t_off. Para la definicin de la funcin trapezoidal existe adems el tiempo de crecimiento t_rise. ste es el tiempo, en el cual la seal debe subir desde 0 hasta amplitude. Este tiempo se utiliza tambin para la cada desde amplitude hasta 0.
128
33002250
FGEN: Generador de funciones
"Suavizado" de una funcin
Cuando una funcin tiene que crecer o decrecer siguiendo una rampa, existe siempre una discontinuidad en los puntos de inflexin. La pendiente aqu no es continua. Para la realizacin de un crecimiento o decrecimiento continuo se utiliza el "suavizado", o sea, la rampa se convierte en una curva en S. Suavizado" de una funcin
Y amplitude
S3
II
III
v=0 v' = -a
S2
S1
v=0 v' = +a
v = v0 v' = 0 t
t_acc t_rise
t_acc
Esta rampa se descompone en tres partes. En la parte I se sube desde 0 "acelerando". En la parte II se contina la marcha con la velocidad alcanzada al final de la parte I. En la parte III se frena con la aceleracin de la parte I, para alcanzar con suavidad el punto final. Se puede elegir libremente el tamao de los sectores. Estos se definen a travs de las especificaciones de t_acc y t_rise. La aceleracin utilizada se calcula mediante las siguientes frmulas:
amplitude = S1 + S2 + S3
con
a 2 S3 = S1 = -- t_acc 2
y
S2 = a t_acc ( t_rise 2 t_acc )
33002250
129
FGEN: Generador de funciones
De aqu resulta
amplitude a = --------------------------------------------------------2 t_acc t_rise t_acc
Nota: El Suavizado slo se utilizar en las funciones "rampa", "diente de sierra", "tringulo" y "trapecio". "Salto", "rectngulo" y "seno" no son funciones que admitan el "suavizado".
Utilizacin de los distintos parmetros
Aprovechamiento de los parmetros dentro de las diversas funciones
Funcin Salto Rampa Diente de sierra Tringulo Rectngulo Trapecio Seno Nmero casual amplitude halfperiod t_off X X X X X X X X X X X X X X X X X X X X X halfperiod - t_acc (halfperiod - t_acc)/2 X X X X X X X X X t_rise t_acc unipolar
Encontrar la representacin grfica de las funciones en la seccin Diagramas de las distintas funciones, p. 131
Servicio unipolar
A travs del parmetro unipolar se puede definir si la funcin se debe entregar como unipolar o como bipolar. Aqu se debe contemplar que, en el caso de servicio unipolar, un perodo est caracterizado no obstante como 2 medias ondas "unipolares". Durante el recorrido de un perodo, se pueden modificar todos los parmetros de la funcin. Pero dichas modificaciones no se activarn hasta que finalice el perodo. Si, por ejemplo, se modifica el tiempo de desconexin t_off durante la ejecucin de un perodo, no se activar hasta el perodo siguiente. Si se modifica el parmetro func_no durante la ejecucin de un perodo, tambin finalizar primeramente el perodo actual con la funcin (las funciones) seleccionada(s) previamente. Despus se arrancar la nueva funcin. Aqu se resetear la salida N, que indica la cantidad de perodos.
Modificacin de los parmetros de la funcin
Modificacin de la funcin
130
33002250
FGEN: Generador de funciones
Diagramas de las distintas funciones
Funcin escaln
Representacin de la funcin escaln
Y
START = 1
START = 0
Funcin rampa
Representacin de la funcin rampa
Y
t t_acc t_rise START = 1
33002250
131
FGEN: Generador de funciones
Funcin diente se sierra
Representacin de la funcin diente de sierra
Y
t t_acc halfperiod t_off
Funcin tringulo
Representacin de la funcin tringulo
Y
t t_acc halfperiod t_off
132
33002250
FGEN: Generador de funciones
Funcin rectangular
Representacin de la funcin rectngular
Y
t t_off halfperiod
Funcin trapezoidal
Representacin de la funcin trapezoidal
Y
t_acc t_rise t_rise halfperiod t_off
33002250
133
FGEN: Generador de funciones
Funcin senoidal
Representacin de la funcin senoidal
Y
t t_off halfperiod
134
33002250
FGEN: Generador de funciones
Casos especiales
Funcin escaln
En la funcin "escaln" se ajustar la salida en START = 0 al valor Y = YOFF y en START = 1 al valor Y = YOFF + amplitude Las especificaciones de tiempo (t_off, t_rise, t_acc) no tienen importancia en esta funcin. En cada nuevo flanco 0 1 en la entrada START se incrementa la salida N. Para esta funcin no existe el servicio bipolar, es decir, el valor del parmetro bipolar no se tendr en cuenta.
Funcin rampa
Con la funcin "Rampa" la salida Y sube, siguiendo una rampa, desde YOFF a YOFF + amplitude. Mientras contine START en 1, la salida Y permanecer en el valor YOFF + amplitude. Si se retira START a 0, la salida Y saltar al valor YOFF. El crecimiento se determinar a travs del tiempo t_rise y t_acc. El tiempo t_rise indica aqu el tiempo en el cual el valor de Y = YOFF sube hasta el valor de Y = YOFF + amplitude. A travs de t_acc se puede "suavizar" este tiempo. En cada nuevo flanco 0 1 en la entrada START se incrementa la salida N. Para esta funcin no existe el servicio bipolar, es decir, el valor del parmetro bipolar no se tendr en cuenta.
Nmero casual
En la funcin "Nmero casual" se ajustar la salida Y con un nmero "casual" comprendido entre YOFF Y YOFF + amplitude, en servicio unipolar y YOFF - amplitude Y YOFF + amplitude, en servicio bipolar. Las especificaciones de tiempo (t_off, t_rise, t_acc) no tienen importancia en esta funcin. En cada nuevo flanco 0 1 en la entrada START se incrementa la salida N.
33002250
135
FGEN: Generador de funciones
Cronogramas
Servicio bipolar
Para la representacin de las distintas funciones en servicio bipolar son vlidos los siguientes parmetros predeterminados:
Parmetro amplitude halfperiod t_off t_rise t_acc unipolar Valor predeterminado 1 10 2 2 0 0
Servicio bipolar
Diente de sierra
amplitude
Tringulo Rectngulo Trapecio
Seno
Nmero casual
136
-amplitude
33002250
FGEN: Generador de funciones
Servicio unipolar
Para la representacin de las distintas funciones en servicio unipolar son vlidos los siguientes parmetros predeterminados:
Parmetro amplitude halfperiod t_off t_rise t_acc unipolar Valor predeterminado 1 10 2 2 0 1
Servicio unipolar
YS
Diente de sierra
Tringulo Rectngulo Trapecio
Seno
Nmero casual
33002250
137
FGEN: Generador de funciones
Funcin trapezoidal
Para la representacin de la funcin trapezoidal con tiempo de suavizado son vlidos los siguientes parmetros predeterminados:
Parmetro amplitude halfperiod t_off t_rise t_acc Valor predeterminado 1 10 1 4 1.5
Funcin trapezoidal
2 1 0 N
amplitude
-ampiltude
unipolar 1 0 1 0 START
138
33002250
INTEG: Integrador con limitacin
12
Vista general
Introduccin Contenido:
Este captulo describe el bloque INTEG. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 140 141 143 144
33002250
139
INTEG: Integrador con limitacin
Descripcin breve
Descripcin de funciones
El bloque de funcin realiza un integrador con limitacin. El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
140
l l
La funcin de transferencia es: gain G(s) = ---------s La frmula para el clculo es: X ( new) + X ( old ) Y = Y ( old ) + gain dt ------------------------------------2 Significado de las magnitudes
Magnitud Significado el valor de la entrada X del ciclo anterior el valor de la salida Y del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
X ( old ) Y ( old )
dt
33002250
INTEG: Integrador con limitacin
Representacin
Smbolo
Representacin del bloque
INTEG
REAL Mode_MH Para_INTEG REAL
X MODE PARA YMAN
Y STATUS
REAL Stat_MAXMIN
Descripcin de parmetros INTEG
Descripcin de parmetros del bloque
Parmetros X MODE PARA YMAN Y STATUS Tipo de datos REAL Mode_MH Para_INTEG REAL REAL Stat_MAXMIN Significado Magnitud de entrada Modalidades de servicio Parmetros Valor de posicionado manual Salida Estado de la salida
Descripcin del parmetro Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
Descripcin de parmetros Para_INTEG
Descripcin de la estructura de datos
Elemento gain ymax ymin Tipo de datos REAL REAL REAL Significado Amplificacin de la integracin (Unidades/segundo) Lmite superior de posicionado Lmite inferior de posicionado
33002250
141
INTEG: Integrador con limitacin
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento qmin qmax Tipo de datos BOOL BOOL Significado "1" = Y alcanz el lmite de posicionado inferior "1" = Y alcanz el lmite de posicionado superior
142
33002250
INTEG: Integrador con limitacin
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin se efecta determinando la amplificacin de integracin gain y los valores lmite ymax e ymin para la salida Y. Los valores ymax e ymin limitan la salida tanto hacia arriba como hacia abajo. De esta forma rigen ymin Y ymax A travs de qmax y qmin se visualiza cuando se alcanzan los valores lmites as como cuando se alcanza una limitacin de la seal de salida: qmax = 1 si Y ymax qmin = 1 si Y ymin
Modalidades de servicio
33002250
l l
Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidad de servicio Automtico Manual man 0 1 halt 0 01 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor manual YMAN se transmite de forma fija a la salida Y. Pero la salida de posicionado se limita, no obstante, a travs de ymax e ymin. La salida Y se mantendr en el ltimo valor calculado. La salida ya no se modificar, pero el usuario la podr sobrescribir.
Detenido
143
INTEG: Integrador con limitacin
Ejemplo
La seal de entrada se integra a travs del tiempo. En el caso de un escaln en la entrada X, la salida aumenta (en caso de valores positivos de X) o bien cae (en caso de valores negativos de X) de acuerdo a una funcin de rampa. Y se encuentra siempre entre ymax e ymin; si Y es igual a ymax o ymin se visualizar como corresponde en qmax o qmin. Representacin de la respuesta a escaln del integrador
ymax Y
ymin = 0
1 0 1 0 1 0
halt qmax qmin
Error de tiempo de ejecucin
Aviso de error
Se efectuar un aviso de error cuando: haya un nmero de coma flotante no permitido en la entrada YMAN o X, ymax es < ymin
144
l l
33002250
INTEGRATOR: Integrador con limitacin
13
Vista general
Introduccin Contenido:
Este captulo describe el bloque INTEGRATOR. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 146 147 148 149
33002250
145
INTEGRATOR: Integrador con limitacin
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin realiza un integrador con limitacin. El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio Tracking y Automtico Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
146
l l
La funcin de transferencia es: GAIN G(s) = --------------s La frmula para la salida OUT es:
IN ( new ) + IN ( old ) OUT = OUT ( old ) ) + GAIN dt -----------------------------------------2
Significado de las magnitudes
Magnitud Significado el valor actual de la entrada IN el valor de la entrada IN del ciclo anterior el valor de la salida OUT del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
IN ( ne w ) IN ( ol d ) OUT ( old )
dt
33002250
INTEGRATOR: Integrador con limitacin
Representacin
Smbolo
Representacin del bloque
INTEGRATOR
REAL REAL REAL REAL REAL BOOL
IN GAIN OUT_MIN OUT_MAX TR_I TR_S
OUT
REAL
QMIN QMAX
BOOL BOOL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros IN GAIN OUT_MIN OUT_MAX TR_I TR_S Tipo de datos REAL REAL REAL REAL REAL BOOL Significado Magnitud de entrada Amplificacin de integracin Lmite inferior de posicionado Lmite superior de posicionado Entrada de inicializacin Tipo de inicializacin "1" = Modalidad de servicio Tracking "0" = Modalidad de servicio Automtico Salida "1" = Salida OUT alcanz el lmite inferior de posicionado "1" = Salida OUT alcanz el lmite superior
OUT QMIN QMAX
REAL BOOL BOOL
33002250
147
INTEGRATOR: Integrador con limitacin
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin tiene lugar mediante la determinacin de la amplificacin de integracin GAIN y de los valores lmites OUT_MAX y OUT_MIN para la salida OUT. Los lmites OUT_MAX y OUT_MIN limitan la salida tanto hacia arriba como hacia abajo. De esta manera rige OUT_MIN OUT OUT_MAX. Se visualiza a travs de ambas marcas QMAX y QMIN cuando se alcanzan los valores lmites o una limitacin de la seal de salida: QMAX = 1 cuando OUT OUT_MAX QMIN = 1 cuando OUT OUT_MIN
Modalidades de servicio
148
l l
Existen dos modalidades de servicio, que se seleccionan a travs de la entrada TR_S
Modalidad de servicio Automtico Tracking TR_S 0 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor de Tracking TR_I se transmite de forma fija a la salida OUT. No obstante, la salida de posicionado se limita mediante OUT_MAX y OUT_MIN.
33002250
INTEGRATOR: Integrador con limitacin
Ejemplo
La seal de entrada se integra a travs del tiempo. En el caso de un escaln en la entrada IN, la salida aumenta (en caso de valores positivos de IN) o bien cae (en caso de valores negativos de IN) de acuerdo a una funcin de rampa. OUT se encuentra siempre entre OUTMAX y OUT_MIN; en caso de ser OUT igual a OUT_MAX OUT_MIN, se indicar como corresponde en QMAX QMIN. Se representa la respuesta a escaln del integrador:
OUT_MAX
OUT
IN
OUT_MIN =0
1 0 1 0
QMAX QMIN
Error de tiempo de ejecucin
Aviso de error
En OUT_MAX < OUT_MIN se efecta un aviso de error.
33002250
149
INTEGRATOR: Integrador con limitacin
150
33002250
INTEGRATOR1: Integrador con limitacin
14
Vista general
Introduccin Contenido:
Este captulo describe el bloque INTEGRATOR1. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 152 153 154 155
33002250
151
INTEGRATOR1: Integrador con limitacin
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin realiza un integrador con limitacin. El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio Manual, Detenido y Automtico. Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
152
l l
La funcin de transferencia es:
GAIN G(s) = --------------s
La frmula para la salida Y es:
X ( ne w ) + X ( ol d) Y = Y ( old ) ) + GAIN dt ------------------------------------2 Significado de las magnitudes
Magnitud Significado el valor de la entrada X del ciclo anterior el valor de la salida Y del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
X ( old ) Y ( old )
dt
33002250
INTEGRATOR1: Integrador con limitacin
Representacin
Smbolo
Representacin del bloque
INTEGRATOR1
BOOL BOOL REAL REAL REAL REAL REAL
MAN HALT X GAIN YMAN YMIN YMAX
Y QMAX QMIN
REAL BOOL BOOL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros MAN HALT X GAIN YMAX YMIN YMAN Y QMAX QMIN Tipo de datos BOOL BOOL REAL REAL REAL REAL REAL REAL BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido Magnitud de entrada Amplificacin de integracin Lmite superior de posicionado Lmite inferior de posicionado Valor de posicionado manual Salida "1" = Salida Y alcanz el lmite superior "1" = Salida Y alcanz el lmite inferior
33002250
153
INTEGRATOR1: Integrador con limitacin
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin se efecta determinando la amplificacin de integracin GAIN y los valores lmite YMAX e YMIN para la salida Y. Los lmites YMAX e YMIN limitan la salida tanto hacia arriba como hacia abajo. De esta manera rige YMIN Y YMAX. Se visualiza a travs de ambas marcas QMAX y QMIN cuando se alcanzan los valores lmites o una limitacin de la seal de salida: QMAX = 1 si Y YMAX QMIN = 1 si Y YMIN
Modalidades de servicio
154
l l
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT:
Modalidad de MAN servicio Automtico Manual 0 1 HALT 0 01 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor manual YMAN se transmite de forma fija a la salida Y. No obstante, la salida de posicionado se limita a travs de YMAX e YMIN. La salida Y se mantendr en el ltimo valor calculado.
Detenido
33002250
INTEGRATOR1: Integrador con limitacin
Ejemplo
La seal de entrada se integra a travs del tiempo. En el caso de un escaln en la entrada X, la salida aumenta (en caso de valores positivos de X) o bien cae (en caso de valores negativos de X) de acuerdo a una funcin de rampa. Y se encuentra siempre entre YMAX e YMIN; en caso de ser Y igual a YMAX YMIN, se indicar como corresponde en QMAX QMIN. Se representa la respuesta a escaln del integrador:
YMAX Y
YMIN = 0
1 0 1 0 1 0
HALT QMAX QMIN
Error de tiempo de ejecucin
Aviso de error
En YMAX < YMIN se efecta un aviso de error.
33002250
155
INTEGRATOR1: Integrador con limitacin
156
33002250
K_SQRT: Raz cuadrada
15
Vista general
Introduccin Contenido:
Este captulo describe el bloque K_SQRT. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Error de tiempo de ejecucin Pgina 158 158 159
33002250
157
K_SQRT: Raz cuadrada
Descripcin breve
Descripcin de funcionamiento
Este bloque de funcin calcula la raz cuadrada ponderada de un valor numrico. Se puede definir un punto de separacin, por debajo del cual el bloque de funcin entregue el valor cero. El clculo de la raz cuadrada sirve tpicamente para la linealizacin de un valor de medicin de un caudal a travs de un dispositivo reductor Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
El bloque de funcin realiza el siguiente clculo:
Clculo Condicin
OUT = K IN OUT = 0
IN CUTOFF IN < 0 - o - IN < CUTOFF
Representacin
Smbolo
Representacin del bloque
K_SQRT
REAL REAL REAL
IN K CUTOFF
OUT
REAL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros IN K CUTOFF OUT Tipo de datos REAL REAL REAL REAL Significado Valor numrico que se debe procesar Coeficiente de ponderacin Punto de separacin Resultado del clculo
158
33002250
K_SQRT: Raz cuadrada
Error de tiempo de ejecucin
Aviso de error
Se visualizar un error si se detecta un valor no flotante en una de las entradas o si se presenta un problema en un clculo de valores con coma flotante. La salida OUT permanecer en este caso sin variacin. Se emitir una advertencia si la entrada CUTOFF es negativa. El bloque de funcin utilizar entonces el valor 0 para realizar el clculo.
Advertencia
33002250
159
K_SQRT: Raz cuadrada
160
33002250
LAG: Unidad de retardo de primer orden
16
Vista general
Introduccin Contenido:
Este captulo describe el bloque LAG. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Pgina 162 163 164
33002250
161
LAG: Unidad de retardo de primer orden
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa una unidad de retardo de primer orden (pasabajos) El bloque de funcin dispone de las siguientes modalidades de servicio: Manual Detenido Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
Significado de las magnitudes
Magnitud Significado el valor de la entrada X del ciclo anterior el valor de la salida Y del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
X ( old ) Y ( old )
dt
162
X ( old ) + X ( new ) dt Y = Y ( old ) + ------------------ gain ------------------------------------- Y ( ol d ) lag + dt 2
l l l
La funcin de transferencia es:
gain G(s) = gain ------------------------1 + s lag
La frmula para el clculo es:
33002250
LAG: Unidad de retardo de primer orden
Representacin
Smbolo
Representacin del bloque
LAG
REAL Mode_MH Para_LAG REAL
X MODE PARA YMAN
REAL
Descripcin de parmetros LAG
Descripcin de parmetros del bloque
Parmetros X MODE PARA YMAN Y Tipo de datos REAL Mode_MH Para_LAG REAL REAL Significado Valor de entrada Modalidades de servicio Parmetros Valor de posicionado manual Salida
Descripcin del parmetro Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
Descripcin de parmetros Para_LAG
Descripcin de la estructura de datos
Elemento gain lag Tipo de datos REAL TIME Significado Factor de amplificacin Constante de tiempo de retardo
33002250
163
LAG: Unidad de retardo de primer orden
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin se efecta determinando el factor de amplificacin gain as como la parametrizacin de la constante del tiempo de retardo lag. Al salto de salto de escaln unitario en la entrada X (salto en la entrada X de 0 a 1.0) le sigue la salida Y en forma retardada. Despus de una funcin exponencial
exp ( t lag )
se aproximar al valor gain X .
Modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidad de servicio Automtico Manual Detenido man 0 1 0 halt 0 01 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor manual YMAN se transmite de forma fija a la salida Y. La salida Y se mantendr en el ltimo valor calculado. La salida ya no se modificar, pero el usuario la podr sobrescribir.
164
33002250
LAG: Unidad de retardo de primer orden
Ejemplo
El diagrama muestra un ejemplo para la respuesta del bloque de funcin al escaln: La entrada X salta a un nuevo valor, y la salida Y le sigue a la entrada X de acuerdo a una funcin exponencial. Respuesta a un escaln del bloque de funcin LAG con gain = 1
X
0 1 0 halt
33002250
165
LAG: Unidad de retardo de primer orden
166
33002250
LAG1: Unidad de retardo de primer orden
17
Vista general
Introduccin Contenido:
Este captulo describe el bloque LAG1. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Pgina 168 169 170
33002250
167
LAG1: Unidad de retardo de primer orden
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa una unidad de retardo de primer orden. El bloque de funcin dispone de las siguientes modalidades de servicio: Manual Detenido Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
Significado de las magnitudes
Magnitud Significado el valor de la entrada X del ciclo anterior el valor de la salida Y del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
X ( old ) Y ( old )
dt
168
l l l
La funcin de transferencia es:
1 G(s) = gain ------------------------1 + s lag
La frmula para el clculo es:
X ( old ) + X ( ne w ) dt Y = Y ( old ) + ----------------------- gain ------------------------------------- Y ( old ) LAG + dt 2
33002250
LAG1: Unidad de retardo de primer orden
Representacin
Smbolo
Representacin del bloque
LAG1
BOOL BOOL REAL REAL TIME REAL
MAN HALT X GAIN LAG YMAN
REAL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros MAN HALT X GAIN LAG YMAN Y Tipo de datos BOOL BOOL REAL REAL TIME REAL REAL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido Valor de entrada Factor de amplificacin Constante de tiempo de retardo Valor de posicionado manual Salida
33002250
169
LAG1: Unidad de retardo de primer orden
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin se efecta determinando el factor de amplificacin GAIN as como la parametrizacin de la constante del tiempo de retardo LAG. Al salto de salto de escaln unitario en la entrada X (salto en la entrada X de 0 a 1.0) le sigue la salida Y en forma retardada. Despus de una funcin exponencial
exp ( t ( LAG ) )
se aproximar al valor GAIN X .
Modalidades de servicio
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT:
Modalidad de servicio Automtico Manual Halt MAN 0 1 0 HALT 0 01 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor manual YMAN se transmite de forma fija a la salida Y. La salida Y se mantendr en el ltimo valor calculado.
170
33002250
LAG1: Unidad de retardo de primer orden
Ejemplo
El diagrama muestra un ejemplo para la respuesta de la unidad PLAG al escaln: La entrada X salta a un nuevo valor, y la salida Y le sigue a la entrada X de acuerdo a una funcin exponencial. Respuesta a escaln del bloque de funcin LAG1 con GAIN = 1
X
0 1 0 HALT
33002250
171
LAG1: Unidad de retardo de primer orden
172
33002250
LAG2: Unidad de retardo de segundo orden
18
Vista general
Introduccin Contenido:
Este captulo describe el bloque LAG2. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Diagramas de ciclos Pgina 174 175 176 177
33002250
173
LAG2: Unidad de retardo de segundo orden
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin LAG2 representa una unidad de retardo de segundo orden. El bloque de funcin dispone de las siguientes modalidades de servicio: Manual Detenido Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
La frmula para el clculo es:
Y ( new ) = A B
siendo
gain X ( freq dt ) + Y ( ol d ) A = --------------------------------------------------------------------------------------------2 1 + 2 dmp freq dt + ( freq dt )
2
y
( 2 dmp freq dt 2 ) Y ( old2 ) B = --------------------------------------------------------------------------------------------2 1 + 2 dmp freq dt + ( freq dt )
Significado de las magnitudes
Magnitud Significado el valor de la salida Y del ciclo anterior el valor de la salida Y del ciclo ante-anterior la diferencia de tiempo entre la llamada actual y la anterior
Y ( old ) Y ( old2 )
dt
174
l l l
La funcin de transferencia es:
1 G(s) = gain --------------------------------------------------------------s 2 dmp 1 + s 2 ---------- + ---------freq freq
33002250
LAG2: Unidad de retardo de segundo orden
Representacin
Smbolo
Representacin del bloque
LAG2
REAL Mode_MH Para_LAG2 REAL
X MODE PARA YMAN
REAL
Descripcin de parmetros LAG2
Descripcin de parmetros del bloque
Parmetros X MODE PARA YMAN Y Tipo de datos REAL Mode_MH Para_LAG2 REAL REAL Significado Valor de entrada Modalidad de servicio Parmetros Valor manual para la salida Salida
Descripcin del parmetro Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
Descripcin de parmetros Para_LAG2
Descripcin de la estructura de datos
Elemento gain dmp freq Tipo de datos REAL REAL REAL Significado Factor de amplificacin Amortiguacin Frecuencia propia
33002250
175
LAG2: Unidad de retardo de segundo orden
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin tiene lugar a travs de la determinacin del factor de amplificacin gain, as como tambin a travs de la parametrizacin de la amortiguacin dmp y la frecuencia propia freq. Se deben introducir positivas la amortiguacin dmp y la frecuencia propia freq. Al salto en la entrada X le sigue la salida Y con una oscilacin amortiguada. La duracin del perodo de la oscilacin no amortiguada es de T = 1/freq. En los casos de valores de amortiguacin dmp < 1 se habla de una oscilacin amortiguada. En los casos de valores 1 se habla de un comportamiento aperidico (o sea, sin oscilacin); en este caso la salida le sigue a la entrada en forma similar como con 2 bloques de funcin LAG conectados en serie.
Modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidad de servicio Automtico Manual Detenido man 0 1 0 halt 0 01 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor manual YMAN se transmite de forma fija a la salida Y. La salida Y se mantendr en el ltimo valor calculado. La salida ya no se modificar, pero el usuario la podr sobrescribir.
176
33002250
LAG2: Unidad de retardo de segundo orden
Diagramas de ciclos
Vista general
Los siguientes diagramas muestran ejemplos para la respuesta a escaln de la unidad LAG2 con diferentes parametrizaciones. En el caso de una amortiguacin de dmp = 1, le sigue la salida Y a la entrada X con un comportamiento aperidico.
X
Amortiguacin dmp = 1
0 1 0 halt
33002250
177
LAG2: Unidad de retardo de segundo orden
Amortiguacin dmp = 0.5
En el caso de una amortiguacin de dmp = 0.5, la salida Y le sigue a la entrada X de acuerdo a un proceso peridico amortiguado.
0 1 0 halt
Amortiguacin dmp = 0.2
En el caso de amortiguacin de dmp = 0.2, se reconoce claramente que la respuesta a escaln se amortigua mucho menos.
0 1 0 halt
178
33002250
LAG_FILTER: Unidad de retardo de primer orden
19
Vista general
Introduccin Contenido:
Este captulo describe el bloque LAG_Filter. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Pgina 180 181 182
33002250
179
LAG_FILTER: Unidad de retardo de primer orden
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa una unidad de retardo de primer orden. El bloque de funcin dispone de las siguientes modalidades de servicio: Tracking Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
Significado de las magnitudes
Magnitud Significado el valor de la entrada IN del ciclo anterior el valor de la salida OUT del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
IN ( ol d ) OUT ( old )
dt
180
l l
La funcin de transferencia es:
1 G(s) = GAIN -----------------------------1 + s LAG
La frmula para el clculo es:
IN ( ol d ) + IN ( new ) dt OUT = OUT ( old ) + ----------------------- GAIN ------------------------------------------ OUT ( old ) LAG + dt 2
33002250
LAG_FILTER: Unidad de retardo de primer orden
Representacin
Smbolo
Representacin del bloque
LAG_FILTER
REAL REAL TIME REAL BOOL
IN GAIN LAG TR_I TR_S
OUT
REAL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros IN GAIN LAG TR_I TR_S Tipo de datos REAL REAL TIME REAL BOOL Significado Valor de entrada Factor de amplificacin Constante de tiempo de retardo Entrada de inicializacin Tipo de inicializacin "1" = Modalidad de servicio Tracking "0" = Modalidad de servicio Automtico Salida
OUT
REAL
33002250
181
LAG_FILTER: Unidad de retardo de primer orden
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin se efecta determinando el factor de amplificacin GAIN as como la parametrizacin de la constante del tiempo de retardo LAG. Al salto de escaln unitario en la entrada IN (salto en la entrada IN de 0 a 1.0) le sigue la salida OUT en forma retardada. Despus de una funcin exponencial
exp ( t LAG )
se aproximar al valor GAIN X .
Modalidades de servicio
Existen dos modalidades de servicio, que se seleccionan a travs de la entrada TR_S:
Modalidad de servicio Automtico Tracking TR_S 0 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor de Tracking TR_I se transmite de forma fija a la salida OUT.
182
33002250
LAG_FILTER: Unidad de retardo de primer orden
Ejemplo
El diagrama muestra un ejemplo para la respuesta del bloque de funcin LAG_FILTER al escaln: La entrada IN salta a un nuevo valor y la salida OUT seguir a la entrada IN segn una funcin exponencial. Respuesta a escaln del bloque de funcin LAG_FILTER con GAIN = 1
IN
OUT
33002250
183
LAG_FILTER: Unidad de retardo de primer orden
184
33002250
LDLG: Unidad PD con alisamiento
20
Vista general
Introduccin Contenido:
Este captulo describe el bloque LDLG. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Ejemplos del bloque de funcin LDLG Pgina 186 187 188 189
33002250
185
LDLG: Unidad PD con alisamiento
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa una unidad PD seguida de un alisamiento. El bloque de funcin dispone de las siguientes propiedades: Tiempo de retardo definible de la componente D Modalidades de servicio Tracking y Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
186
l l
La funcin de transferencia es:
1 + s LEAD G(s) = GAIN ---------------------------------1 + s LAG
La frmula para el clculo es:
LAG OUT( ol d ) + GAIN ( ( LEAD + dt ) IN LEAD IN ( ol d ) ) OUT = ------------------------------------------------------------------------------------------------------------------------------------------------------------------------LAG + dt
Significado de las magnitudes
Magnitud Significado el valor de la entrada IN del ciclo anterior el valor de la salida OUT del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
IN ( ol d ) OUT ( old )
dt
33002250
LDLG: Unidad PD con alisamiento
Representacin
Smbolo
Representacin del bloque
LDLG
REAL REAL TIME TIME REAL BOOL
IN GAIN LEAD LAG TR_I TR_S
OUT
REAL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros IN GAIN LEAD LAG TR_I TR_S Tipo de datos REAL REAL TIME TIME REAL BOOL Significado Entrada Factor de amplificacin Constante de tiempo de diferenciacin Constante de tiempo de retardo Entrada de inicializacin Tipo de inicializacin "1" = Modalidad de servicio Tracking "0" = Modalidad de servicio Automtico Salida
OUT
REAL
33002250
187
LDLG: Unidad PD con alisamiento
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin se efecta determinando el factor de amplificacin GAIN, as como la parametrizacin de la constante del tiempo de diferenciacin LEAD y la constante del tiempo de retardo LAG. Para tiempos de exploracin muy cortos y para el salto de escaln unitario en la entrada IN (salto en la entrada IN de 0 a 1.0), la salida OUT saltar al valor GAIN LEAD LAG (valor terico - real un poco ms pequeo, debido a que el tiempo de exploracin no puede ser infinitamente pequeo), para luego retornar al valor GAIN 1.0 con la constante de tiempo LAG.
Modalidades de servicio
Existen dos modalidades de servicio, que se seleccionan a travs de la entrada TR_S:
Modalidad de servicio Automtico Tracking TR_S 0 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor de Tracking TR_I se transmite de forma fija a la salida OUT.
188
33002250
LDLG: Unidad PD con alisamiento
Ejemplos del bloque de funcin LDLG
Vista general de los ejemplos
Los siguientes ejemplos se representan en los diagramas siguientes: LEAD = LAG LEAD/LAG = 0.5, GAIN = 1 LEAD/LAG = 2, GAIN = 1
LEAD = LAG
LEAD/LAG = 0.5, GAIN = 1
33002250
l l l
El bloque de funcin se comporta como un bloque puro de multiplicacin con el multiplicador GAIN. Bloque de funcin LDLG con LEAD = LAG
IN 1 0 GAIN OUT
La salida OUT saltar en este caso a la mitad del valor final para luego alcanzar el valor final (GAIN *IN) con la constante de tiempo de retardo LAG. Bloque de funcin LDLG con LEAD/LAG = 0.5 y GAIN = 1
IN
OUT
189
LDLG: Unidad PD con alisamiento
LEAD/LAG = 2, GAIN = 1
La salida OUT saltar en este caso al doble del valor final para luego alcanzar el valor final (GAIN *IN) con la constante de tiempo de retardo LAG. Bloque de funcin LDLG con LEAD/LAG = 2 y GAIN = 1
OUT
IN
190
33002250
LEAD: Diferenciador con alisamiento
21
Vista general
Introduccin Contenido:
Este captulo describe el bloque LEAD. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Pgina 192 193 194
33002250
191
LEAD: Diferenciador con alisamiento
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa una unidad de diferenciacin con una salida OUT retardada por una constante de tiempo LAG. El bloque de funcin dispone de las siguientes modalidades de servicio: Tracking Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
192
l l
La funcin de transferencia para OUT es: s G(s) = GAIN -----------------------------1 + s LAG La frmula para el clculo es:
LAG OUT = ----------------------- ( OUT ( old ) + GAIN ( IN ( ne w ) IN ( old ) ) ) dt + LAG
Significado de las magnitudes
Magnitud Significado el valor de la entrada IN del ciclo anterior el valor de la entrada IN del ciclo anterior el valor de la salida OUT del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
IN ( ne w ) IN ( ol d ) OUT ( old )
dt
33002250
LEAD: Diferenciador con alisamiento
Representacin
Smbolo
Representacin del bloque
LEAD
REAL REAL TIME REAL BOOL
IN GAIN LAG TR_I TR_S
OUT
REAL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros IN GAIN LAG TR_I TR_S Tipo de datos REAL REAL TIME REAL BOOL Significado Valor de entrada Amplificacin de la diferenciacin Constante de tiempo de retardo Entrada de inicializacin Tipo de inicializacin "1" = Modalidad de servicio Tracking "0" = Modalidad de servicio Automtico Salida diferenciador con alisamiento
OUT
REAL
33002250
193
LEAD: Diferenciador con alisamiento
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin tiene lugar mediante la determinacin de la amplificacin GAIN del diferenciador y de la constante de tiempo LAG con la cul se retarda la salida OUT. Para tiempos muy cortos de exploracin y para el salto de escaln unitario en la entrada IN (salto en la entrada X de 0 a 1.0), la salida OUT saltar al valor GAIN (valor terico - real un poco ms pequeo, debido a que el tiempo de exploracin no puede ser infinitamente pequeo), para luego retornar nuevamente a 0 con la constante de tiempo LAG.
Modalidades de servicio
Existen dos modalidades de servicio, que se seleccionan a travs de la entrada TR_S:
Modalidad de servicio Automtico Tracking TR_S 0 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor de Tracking TR_I se transmite de forma fija a la salida OUT.
Ejemplo
Representacin de la respuesta a escaln del bloque de funcin LEAD con GAIN = 1 y LAG = 10s:
IN TR_I OUT
TR_S 1 0
194
33002250
LEAD_LAG: Unidad PD con alisamiento
22
Vista general
Introduccin Contenido:
Este captulo describe el bloque LEAD_LAG. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Ejemplos del bloque de funcin LEAD_LAG Error de tiempo de ejecucin Pgina 196 197 198 199 201
33002250
195
LEAD_LAG: Unidad PD con alisamiento
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa una unidad PD seguida de un pasabajos. El bloque de funcin dispone de las siguientes propiedades: Tiempo de retardo definible de la componente D Modalidades de servicio: Manual, Detenido, Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
196
l l
La funcin de transferencia es:
1 + s lead G(s) = gain ---------------------------1 + s lag
La frmula para el clculo es:
lag Y ( old ) + gain ( ( lead + dt ) X lead X ( ol d) ) Y = -------------------------------------------------------------------------------------------------------------------------------------lag + dt
Significado de las magnitudes
Magnitud Significado el valor de la entrada X del ciclo anterior el valor de la salida Y del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
X ( old ) Y ( old )
dt
33002250
LEAD_LAG: Unidad PD con alisamiento
Representacin
Smbolo
Representacin del bloque
LEAD_LAG
REAL Mode_MH Para_LEAD_LAG REAL
X MODE PARA YMAN
REAL
Descripcin de parmetros LEAD_LAG
Descripcin de parmetros del bloque
Parmetros X MODE PARA YMAN Y Tipo de datos REAL Mode_MH Para_LEAD_LAG REAL REAL Significado Entrada Modalidades de servicio Parmetros Valor manual-valor de posicionado Salida
Descripcin del parmetro Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
Descripcin de parmetros Para_LEAD_LAG
Descripcin de la estructura de datos
Elemento gain lead lag Tipo de datos REAL TIME TIME Significado Factor de amplificacin Constante de tiempo de diferenciacin Constante de tiempo de retardo
33002250
197
LEAD_LAG: Unidad PD con alisamiento
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin se efecta determinando el factor de amplificacin gain, as como la parametrizacin de la constante del tiempo de diferenciacin lead y la constante del tiempo de retardo lag. Para tiempos de exploracin muy cortos y para la entrada de un salto de escaln unitario en la entrada X (salto en la entrada X de 0 a 1.0), la salida Y saltar al valor gain lead lag (valor terico - real un poco ms pequeo, debido a que el tiempo de exploracin no puede ser infinitamente pequeo), para luego acercarse al valor gain 1.0 con la constante de tiempo lag.
Modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidad de servicio Automtico Manual Detenido man 0 1 0 halt 0 01 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor manual YMAN se transmite de forma fija a la salida Y. La salida Y se mantendr en el ltimo valor calculado. La salida ya no se modificar, pero el usuario la podr sobrescribir.
198
33002250
LEAD_LAG: Unidad PD con alisamiento
Ejemplos del bloque de funcin LEAD_LAG
Vista general de los ejemplos
Los siguientes ejemplos se representan en los diagramas siguientes: lead = lag lead=lag * 0.5, gain = 1 lead/lag = 2, gain = 1
lead = lag
33002250
l l l
El bloque de funcin se comporta como un bloque puro de multiplicacin con el multiplicador gain. Bloque de funcin LEAD_LAG con lead = lag
X 1 0 gain Y
0 1 0 halt
199
LEAD_LAG: Unidad PD con alisamiento
lead=lag * 0.5, gain = 1
La salida Y saltar en este caso a la mitad del valor final para luego alcanzar el valor final (gain *X) con la constante de tiempo de retardo lag. Bloque de funcin LEAD_LAG con lead/lag = 0.5 y gain = 1
0 1 0 halt
lead/lag = 2, gain = 1
La salida Y saltar en este caso al doble del valor final para luego alcanzar el valor final (gain * X) con la constante de tiempo de retardo lag. Bloque de funcin LEAD_LAG con lead/lag = 2 y gain = 1
0 1 0 halt
200
33002250
LEAD_LAG: Unidad PD con alisamiento
Error de tiempo de ejecucin
Aviso de error
Aparecer un aviso de error si existe un nmero de coma flotante no vlido en la entrada YMAN o X.
33002250
201
LEAD_LAG: Unidad PD con alisamiento
202
33002250
LEAD_LAG1: Unidad PD con alisamiento
23
Vista general
Introduccin Contenido:
Este captulo describe el bloque LEAD_LAG1. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Ejemplos para el bloque de funcin LEAD_LAG1 Pgina 204 205 206 207
33002250
203
LEAD_LAG1: Unidad PD con alisamiento
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa una unidad PD seguida de un alisamiento. El bloque de funcin dispone de las siguientes propiedades: Tiempo de retardo definible de la componente D Modalidades de servicio: Manual, Detenido, Automtico Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
204
l l
La funcin de transferencia es:
1 + s LEAD G(s) = GAIN ---------------------------------1 + s LAG
La frmula para el clculo es:
LAG Y ( old ) + GAIN ( ( LEAD + dt ) X LEAD X ( ol d ) ) Y = ----------------------------------------------------------------------------------------------------------------------------------------------------------LAG + dt
Significado de las magnitudes
Magnitud Significado el valor de la entrada X del ciclo anterior el valor de la salida Y del ciclo anterior la diferencia de tiempo entre el ciclo actual y el anterior
X ( old ) Y ( old )
dt
33002250
LEAD_LAG1: Unidad PD con alisamiento
Representacin
Smbolo
Representacin del bloque
LEAD_LAG1
BOOL BOOL REAL REAL TIME TIME REAL
MAN HALT X GAIN LEAD LAG YMAN
REAL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros MAN HALT X GAIN LEAD LAG YMAN Y Tipo de datos BOOL BOOL REAL REAL TIME TIME REAL REAL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido Entrada Factor de amplificacin Constante de tiempo de diferenciacin Constante de tiempo de retardo Valor manual-valor de posicionado Salida
33002250
205
LEAD_LAG1: Unidad PD con alisamiento
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin se efecta determinando el factor de amplificacin GAIN, as como la parametrizacin de la constante del tiempo de diferenciacin LEAD y la constante del tiempo de retardo LAG. Para tiempos de exploracin muy cortos y para la entrada de un salto de escaln unitario en la entrada X (salto en la entrada X de 0 a 1.0), la salida Y saltar al valor GAIN LEAD LAG (valor terico - real un poco ms pequeo, debido a que el tiempo de exploracin no puede ser infinitamente pequeo), para luego retornar al valor GAIN 1.0 con la constante de tiempo LAG.
Modalidades de servicio
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT:
Modalidad de servicio Automtico Manual Detenido MAN 0 1 0 HALT 0 01 1 Significado El bloque de funcin se procesar tal y como se describe en "Parametrizacin". El valor manual YMAN se transmite de forma fija a la salida Y. La salida Y se mantendr en el ltimo valor calculado.
206
33002250
LEAD_LAG1: Unidad PD con alisamiento
Ejemplos para el bloque de funcin LEAD_LAG1
Vista general de los ejemplos
Los siguientes ejemplos se representan en los diagramas siguientes: LEAD = LAG LEAD=LAG * 0.5, GAIN = 1 LEAD/LAG = 2, GAIN = 1
LEAD = LAG
33002250
l l l
El bloque de funcin se comporta como un bloque puro de multiplicacin con el multiplicador GAIN. Bloque de funcin LEAD_LAG1 con LEAD = LAG
X 1 0 GAIN Y
0 1 0 HALT
207
LEAD_LAG1: Unidad PD con alisamiento
LEAD=LAG * 0.5, GAIN = 1
La salida Y saltar en este caso a la mitad del valor final para luego alcanzar el valor final (GAIN *X) con la constante de tiempo de retardo lag. Bloque de funcin LEAD_LAG1 con LEAD/LAG = 0.5 y GAIN = 1
0 1 0 HALT
LEAD/LAG = 2, GAIN = 1
La salida Y saltar en este caso al doble del valor final para luego alcanzar el valor final (GAIN *X) con la constante de tiempo de retardo LAG. Bloque de funcin LEAD_LAG1 con LEAD/LAG = 2 y GAIN = 1
0 1 0 HALT
208
33002250
LIMV: Limitador de crecimiento de primer orden
24
Vista general
Introduccin Contenido:
Este captulo describe el bloque LIMV. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 210 211 212 213
33002250
209
LIMV: Limitador de crecimiento de primer orden
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa un limitador de crecimiento de primer orden con limitacin de la magnitud de posicionado. El gradiente de la magnitud de entrada X se limita a un valor RATE predeterminable. Adems, la salida Y se limita mediante YMAX e YMIN. De esta manera, el bloque de funcin puede adaptar las seales teniendo en cuenta las limitaciones tecnolgicas de las velocidades y las posiciones finales de los actuadores. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico
210
l l
33002250
LIMV: Limitador de crecimiento de primer orden
Representacin
Smbolo
Representacin del bloque
LIMV
BOOL BOOL REAL REAL REAL REAL REAL
MAN HALT X RATE YMAX YMIN YMAN
Y QMAX QMIN
REAL BOOL BOOL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros MAN HALT X RATE YMAX YMIN YMAN Y QMAX QMIN Tipo de datos BOOL BOOL REAL REAL REAL REAL REAL REAL BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido Entrada Limitacin mxima del crecimiento (x' mxima) Lmite superior de posicionado Lmite inferior de posicionado Valor de posicionado manual Salida "1" = La salida Y ha alcanzado el lmite superior "1" = La salida Y ha alcanzado el lmite inferior
33002250
211
LIMV: Limitador de crecimiento de primer orden
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin tiene lugar mediante la determinacin de la velocidad mxima de crecimiento RATE y de los lmites YMAX e YMIN para la salida Y. La mxima velocidad de crecimiento indica cunto puede cambiar el valor de la salida en un segundo. El valor se calcula a partir del parmetro RATE. Si RATE = 0, entonces Y = X. Los lmites YMAX e YMIN limitan la salida tanto hacia arriba como hacia abajo. De esta manera rige YMIN Y YMAX. Si se llega a los valores lmite o si hay limitacin de la seal de salida se indicar mediante las salidas QMAX y QMIN: QMAX = 1 si Y YMAX QMIN = 1 si Y YMIN
Modalidades de servicio
212
l l
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT:
Modalidad de servicio Automtico Manual MAN 0 1 HALT 0 01 Significado Constantemente se calcula y entrega el valor actual para Y. El valor manual YMAN se transmite de forma fija a la salida Y. No obstante, la salida de posicionado se limita a travs de YMAX e YMIN. La salida Y se mantendr en el ltimo valor calculado.
Halt
33002250
LIMV: Limitador de crecimiento de primer orden
Ejemplo
Al salto en la entrada X le sigue el bloque de funcin con su velocidad de modificacin mxima. Durante el modo de servicio detenido, la salida Y se detiene, para luego continuar a partir del punto en el que se detuvo. Tambin se reconoce claramente la limitacin de la salida Y mediante YMAX e YMIN con sus correspondientes avisos QMAX y QMIN. Comportamiento dinmico de LIMV
YMAX
X Y
YMIN 1 0 1 0 1 0 QMAX QMIN HALT
Error de tiempo de ejecucin
Aviso de error
En YMAX < YMIN se efecta un aviso de error.
33002250
213
LIMV: Limitador de crecimiento de primer orden
214
33002250
MFLOW: Bloque para caudal volumtrico
25
Vista general
Introduccin Contenido:
Este captulo describe el bloque MFLOW. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 216 217 218 219
33002250
215
MFLOW: Bloque para caudal volumtrico
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin MFLOW calcula el caudal volumtrico de un gas en un dispositivo reductor basndose en la presin diferencial y las condiciones de temperatura y presin del gas. El valor medido para la presin diferencial se puede sustituir por la velocidad del medio u otro valor con compensacin de presin y temperatura. Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
La frmula completa (es decir, con en_sqrt = 1, en_pres = 1 y en_temp =1) es como sigue:
OUT = k IN PA -------------------TA
Significado de las magnitudes
Magnitud PA TA Significado Presin del gas en unidades absolutas Temperatura absoluta del gas en grados Kelvin
216
33002250
MFLOW: Bloque para caudal volumtrico
Representacin
Smbolo
Representacin del mdulo
MFLOW
REAL REAL REAL Para_MFLOW
IN PRES TEMP PARA
OUT STATUS
REAL WORD
Descripcin de parmetros MFLOW
Descripcin de los parmetros del mdulo
Parmetro IN PRES TEMP PARA OUT STATUS Tipo de datos REAL REAL REAL Para_MFLOW REAL WORD Significado Entrada Presin del gas absoluta o relativa Temperatura del gas expresada en C o F Parmetro Valor del caudal volumtrico, con correccin de la temperatura y la presin Palabra de estado
Descripcin de parmetros Para_MFLOW
Descripcin de la estructura de datos
Elemento k en_pres pr_pa pu en_temp tc_tf en_sqrt Tipo de datos REAL BOOL BOOL REAL BOOL BOOL BOOL Significado Constante de clculo (vase Clculo de la constante k, p. 218) "1": Activacin de la correccin de presin "1": PRES es una presin absoluta "0": PRES es una presin relativa Valor que representa 1 atmsfera en la unidad de presin utilizada "1": Activacin de la correccin de temperatura "1": TEMP se expresa en grados Fahrenheit "0": TEMP se expresa en grados centgrados "1": Clculo con raz cuadrada
33002250
217
MFLOW: Bloque para caudal volumtrico
Descripcin detallada
Clculo de la constante k
La constante k se puede calcular tomando como base un punto de trabajo de referencia en el que se conoce el caudal volumtrico (MF_REF), la presin diferencial (IN_REF), la presin absoluta (P_REF) y la temperatura absoluta (T_REF). Si la entrada IN es una presin diferencial, la frmula ser la siguiente:
T_REF k = MF_REF ---------------------------------------------P_REF IN_REF
Si la entrada IN no es una presin diferencial, la frmula ser la siguiente:
k = MF_REF
Especificacin del clculo
Para el clculo se ha predeterminado una sencilla multiplicacin: OUT = k IN . Para conseguir una compensacin de presin o temperatura, se debern poner a 1 los parmetros en_pres o en_temp. Tambin la raz cuadrada est activa slo si en_sqrt = 1. Si uno de los parmetros en_sqrt, en_pres, en_temp permanece a 0, el clculo de la constante k deber adaptarse de acuerdo con esto (borrar la raz cuadrada, sustituir P_REF o T_REF por1)
Unidad de temperatura
La temperatura TEMP se puede expresar en grados centgrados o Fahrenheit, dependiendo del valor del parmetro tc_tf :
tc_tf 0 Unidad de temperatura de TEMP Grados centgrados Clculo de la temperatura absoluta TA: TA(K) = TEMP + 273 1 Grados Fahrenheit Clculo de la temperatura absoluta TA:
5 TA(K) = -- ( TEMP 32 ) + 273 9
Unidad de presin
La presin PRES se puede expresar en cualquier unidad como presin absoluta o relativa, dependiendo del valor del parmetro pr_pa.
pr_pa 0 Unidad de presin de PRES Presin relativa El parmetro pu se debe corresponder a 1 atmsfera en la unidad utilizada. Clculo de la presin absoluta: PA = PRES + pu Presin absoluta: PA = PRES
33002250
218
MFLOW: Bloque para caudal volumtrico
Error de tiempo de ejecucin
Palabra de estado
Los bits de la palabra de estado tienen el siguiente significado:
Bit Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1 Significado Error en un clculo en valores con coma flotante Deteccin de un valor no permitido en una entrada de coma flotante Divisin por cero en el clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante Una de las siguientes magnitudes es negativa: IN, pu, PA, TA. Para el clculo, el bloque de funcin utiliza el valor 0.
Aviso de error
En los siguientes casos se genera un mensaje de error: Se ha detectado un valor no permitido en una entrada de coma flotante Divisin por cero en el clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante
Advertencia
33002250
l l l
La salida OUT no se modifica.
Se emitir una advertencia si el parmetro pu es negativo, en este caso, el bloque puede utilizar para el clculo el valor 0 en vez del valor pu defectuoso.
219
MFLOW: Bloque para caudal volumtrico
220
33002250
MS: Control manual de una salida
26
Vista general
Introduccin Contenido:
Este captulo describe el bloque MS. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Ejemplo Error de tiempo de ejecucin Pgina 222 222 224 228 229
33002250
221
MS: Control manual de una salida
Descripcin breve
Descripcin de funcionamiento
Este bloque de funcin sirve para controlar una salida numrica que se puede conectar a una salida analgica, un servomotor o un actuador controlados mediante el bloque de funcin PWM1 (vase PWM1: Modulacin por ancho de pulso, p. 429 ). El control se puede realizar a travs de un cuadro de dilogo de usuario o directamente a travs del programa del PLC. En general, un bloque de funcin de regulador sirve para controlar una salida digital. El bloque MS se deber utilizar si hay que desacoplar la salida del regulador del control de la salida analgica. Se pueden proyectar EN y ENO como parmetros adicionales.
Representacin
Smbolo
222
l l l l
Posibilidades de aplicacin
El bloque de funcin se utiliza principalmente en las siguientes aplicaciones: Para controlar una salida analgica que no se controla mediante un circuito regulador (circuito regulador abierto). En los circuitos reguladores en los que se ha intercalado un proceso de manipulacin entre la salida de regulador y la salida controlada por el usuario. En la exploracin del regulador que controla la salida, si el perodo de exploracin es superior en 1 2 segundos. En el control de un servomotor: el bloque de funcin MS deber intercalarse en este caso entre el bloque del regulador y el servomotor.
Representacin del mdulo
MS
REAL BOOL BOOL BOOL Para_MS REAL BOOL
IN OUT FORC OUTD MA_FORC MA_O MAN_AUTO STATUS PARA TR_I TR_S
REAL REAL BOOL WORD
33002250
MS: Control manual de una salida
Descripcin de parmetros MS
Descripcin de los parmetros del mdulo
Parmetro IN FORC Tipo de datos REAL BOOL Significado Magnitud de posicionado utilizada en la modalidad de servicio Automtico "1": la modalidad de servicio Manual/Automtico se predetermina mediante MA_FORC "0": la modalidad de servicio Manual/Automtico se predetermina mediante MAN_AUTO Modalidad de servicio Manual/Automtico (si FORC = 1) "1": Modalidad de servicio Automtico "0": Modalidad de servicio Manual Modalidad de servicio manual/automtico (si FORC = 0) "1": Modalidad de servicio Automtico "0": Modalidad de servicio Manual Parmetro Entrada de inicializacin Comando de inicializacin Salida absoluta Salida incremental: diferencia entre la salida actual y la salida de la ejecucin anterior Modalidad de servicio actual del mdulo de funcin (0: Manual, 1: Automtico) Palabra de estado
MA_FORC
BOOL
MAN_AUTO
BOOL
PARA TR_I TR_S OUT OUTD MA_O STATUS
Para_MS REAL BOOL REAL REAL BOOL WORD
Descripcin de parmetros Para_MS
Descripcin de la estructura de datos
Elemento out_min out_max inc_rate dec_rate outbias use_bias bumpless Tipo de datos REAL REAL REAL REAL REAL BOOL BOOL Significado Valor lmite inferior de la salida Valor lmite superior de la salida Rampa ascendente en la conmutacin manual/ automtico (unidades por segundo) Rampa descendente en la conmutacin manual/ automtico (unidades por segundo) Valor del bias "1": Habilitacin del bias "1": Ajuste del bias en la conmutacin manual/ automtico (sin brusquedad)
33002250
223
MS: Control manual de una salida
Descripcin detallada
Diagrama de estructura
En el siguiente diagrama se representa la estructura del bloque de funcin:
bumpless outbias Clculo de gradiente OUTD
use_bias
use_bias out_max OUT out_min
IN
Auto Manual
sin brusquedad conmutacin Manual / Automtico inc_rate dec_rate
Ajuste de la seleccin de modalidades de servicio
La seleccin de modalidades de servicio se puede ajustar independientemente de la entrada FORC a travs del programa del PLC o desde un cuadro de dilogo de usuario (aparato de supervisin).
Entrada FORC 0 Ajuste de la modalidad de servicio Ajuste a travs de la entrada MAN_AUTO (mediante dispositivo de mando): MAN_AUTO= 1: Modalidad de servicio Automtico MAN_AUTO= 0: Modalidad de servicio Manual En este caso, la entrada MA_FORC no tiene efecto. Ajuste a travs de la entrada MA_FORC (mediante el programa del PLC): MA_FORC = 1: Modalidad de servicio Automtico MA_FORC = 0: Modalidad de servicio Manual En este caso, la entrada MAN_AUTO no tiene efecto.
La salida MA_O siempre indica la actual modalidad de servicio del bloque de funcin.
224
33002250
MS: Control manual de una salida
33002250
l l l
Caractersticas de la salida OUT
La salida OUT tiene las siguientes caractersticas: Modalidad de servicio Automtico: La salida OUT es la copia de la entrada IN. En esta modalidad de servicio se puede aplicar un valor OUTBIAS a la salida OUT (ajustar use_bias a 1). OUT se calcular de la siguiente forma: OUT = IN + outbias. Modalidad de servicio Manual: El bloque de funcin no ajusta la salida, el usuario puede modificar directamente el valor en la variable conectada a la salida OUT. La salida OUT est limitada bsicamente a un rango entre out_min y out_max. Si el valor calculado por el bloque de funcin (o introducido por el usuario en el modo manual) supera uno de estos valores lmite, se cortar el valor de OUT (auf out_min o out_max). Por el contrario, la salida incremental OUTD nunca tiene en cuenta este truncamiento.
225
MS: Control manual de una salida
Conmutacin manual/ automtico
La conmutacin manual/automtico en la salida se produce sin brusquedad porque el valor de IN no se condujo de repente a la salida. La salida OUT se acerca a la entrada IN en forma de rampa con pendiente positiva (inc_rate) o negativa (dec_rate): se aplicar inc_rate si en el momento de la conmutacin IN es mayor que OUT se aplicar dec_rate si en el momento de la conmutacin IN es menor que OUT
226
l l
Conmutacin sin brusquedad
IN OUT
Servicio Manual
Modalidad automtica
OUT - IN
Pendiente = inc_rate
Conmutacin manual/automtico
La conmutacin sin brusquedad se puede anular en la rampa ascendente poniendo inc_rate a 0. De igual forma, si dec_rate = 0, la conmutacin tendr lugar con brusquedad en el caso de rampa descendente. En ambos casos, la entrada IN se conduce inmediatamente a la salida OUT al conmutar a la modalidad de servicio automtico. Si se utiliza el parmetro outbias (use_bias = 1), se puede conseguir una conmutacin manual/automtica sin brusquedad y sin modificacin de la salida si se pone a 1 el parmetro bumpless. En este caso, el bloque de funcin volver a calcular el parmetro outbias y tendr en cuenta la variacin entre la entrada IN y la salida OUT.
33002250
MS: Control manual de una salida
Conmutacin sin brusquedad con el parmetro Outbias
IN OUT
Servicio Manual
Modalidad automtica
Se calcula de nuevo outbias: outbias = OUT - IN
outbias
Conmutacin manual/automtico
La conmutacin manual/automtico sin brusquedad tiene sentido si la entrada del bloque de funcin no est conectado a ningn regulador o lo est a una salida de regulador sin componente integral.
33002250
227
MS: Control manual de una salida
Ejemplo
Ejemplo
En este ejemplo se intercala un proceso de manipulacin (por parte del DFB FCT) entre la salida del bloque del regulador y la salida controlada por el usuario. Para garantizar una conmutacin sin brusquedad entre las modalidades de servicio manual/automtico, se intercalar el proceso de manipulacin inverso (R_FCT) a la salida del bloque de funcin MS y el resultado se enviar de vuelta a la entrada del regulador RCPY que permanece en la modalidad de servicio Automtico (MAN_AUTO = 1). Representacin del esquema de funciones
FBI_10_3 (2) SAMPLETM TC18_ST INTERVAL DELSCANS Q
TC_18 (3) PIDFF TC18_PV TC18_SP EN ENO PV OUT SP OUTD FF RCPY MAN_AUTO MA_O PARA INFO TR_I STATUS TR_S FBI_10_1 (4) FCT OUT IN OUT
1 TC18_PARA
FBI_10_2 (1) R_FCT TC18_OUT IN
MS_TC18 (5) MS TC18_FORC_MS TC18_MA_FORC TC18_MAN_AUTO TC18_PARA_MS OUT IN FORC OUTD MA_FORC MA_O MAN_AUTO STATUS PARA TR_I TR_S TC18_OUT TC18_MA_O
228
33002250
MS: Control manual de una salida
Error de tiempo de ejecucin
Palabra de estado
Los bits de la palabra de estado tienen el siguiente significado:
Bit Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1 Significado Error en un clculo en valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante Se mostrarn los siguientes errores: Una de las siguientes magnitudes es negativa: inc_rate, dec_rate. Para el clculo, el bloque de funcin utiliza el valor 0. El parmetro Outbias est fuera del rango
Bit 5 = 1 Bit 6 = 1
La salida OUT no ha alcanzado el valor lmite inferior out_min (vase Nota) La salida OUT ha alcanzado el valor lmite superior out_max (vase Nota)
Nota Nota: En el servicio manual estos bits slo permanecen en 1 durante un ciclo del programa. Si el usuario indica un valor para OUT que supera uno de los valores lmite, el bloque de funcin pondr el bit 5 6 a 1 y cortar el valor introducido por el usuario. La siguiente vez que se ejecute el bloque de funcin, el valor de OUT ya no estar fuera del rango y los bits 5 y volvern a estar a 0.
Aviso de error
Aparecer un error si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. En este caso, las salidas OUT, OUTD y MA_O permanecern sin variacin. En los siguientes casos se emitir una advertencia: El parmetro inc_rate es negativo: el bloque de funcin utilizar en este caso el valor 0 en vez del valor errneo de inc_rate. El parmetro dec_rate es negativo: el bloque de funcin utilizar en este caso el valor 0 en vez del valor errneo de dec_rate. El parmetro Outbias est fuera del rango [(out_min - out_max), (out_max out_min)]. El bloque de funcin utilizar en este caso para el clculo el valor (out_min - out_max) o (out_max - out_min).
Advertencia
33002250
l l
[ ( out_min out_max ), ( out_max out_min ) ] .
El bloque de funcin utilizar en este caso un valor recortado: ( out_min out_max ) o ( out_max out_min ) .
l l l
229
MS: Control manual de una salida
230
33002250
MULDIV_W: Multiplicacin / Divisin
27
Vista general
Introduccin Contenido:
Este captulo describe el bloque MULDIV_W. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Error de tiempo de ejecucin Pgina 232 232 233
33002250
231
MULDIV_W: Multiplicacin / divisin
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin MULDIV_W ejecuta una multiplicacin/divisin ponderada de 3 magnitudes numricas de entrada. Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
La frmula es:
k ( IN1 + c1 ) ( IN2 + c2 ) OUT = --------------------------------------------------------------------- + c4 IN3 + c3
Representacin
Smbolo
Representacin del mdulo
MULDIV_W
REAL REAL REAL Para_MULDIV_W
IN1 IN2 IN3 PARA
OUT
REAL
Descripcin del mdulo MULDIV_W
Descripcin de los parmetros del mdulo
Parmetro de IN1 a IN3 PARA OUT Tipo de datos REAL Para_MULDIV_W REAL Significado Magnitudes numricas que hay que procesar Parmetro Resultado del clculo
Descripcin de parmetros PARA_ MULDIV_W
Descripcin de la estructura de datos
Elemento k, de c1 a c4 Tipo de datos REAL Significado Coeficientes de clculo
232
33002250
MULDIV_W: Multiplicacin / divisin
Error de tiempo de ejecucin
Aviso de error
Este error aparecer si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. La salida OUT conserva en general su valor anterior, excepto en una divisin entre 0, donde el valor corresponde a INF, dependiendo de qu signo tenga el contador.
33002250
233
MULDIV_W: Multiplicacin / divisin
234
33002250
PCON2: Regulador de dos puntos
28
Vista general
Introduccin Contenido:
Este captulo describe el bloque PCON2. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 236 237 239 241
33002250
235
PCON2: Regulador de dos puntos
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin reproduce un regulador de dos puntos que, mediante dos realimentaciones dinmicas, recibe un comportamiento similar a un PID. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Dos realimentaciones internas (retardador de primer orden)
236
l l
33002250
PCON2: Regulador de dos puntos
Representacin
Smbolo
Representacin del bloque:
PCON2
REAL REAL Mode_MH Para_PCON2 BOOL
SP PV MODE PARA YMAN
BOOL
ERR_EFF
REAL
Descripcin de parmetros PCON2
Descripcin de parmetros del bloque
Parmetros SP PV MODE PARA YMAN Y ERR_EFF Tipo de datos REAL REAL Mode_MH Para_PCON2 BOOL BOOL REAL Significado Entrada de valor terico Entrada de valor real Modalidades de servicio Parmetros "1" = Valor manual para ERR_EFF "1" = Salida de la magnitud de posicionado Valor efectivo de conmutacin
Descripcin de parmetros Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
33002250
237
PCON2: Regulador de dos puntos
Descripcin de parmetros Para_PCON2
Descripcin de la estructura de datos
Elemento gain lag_neg lag_pos hys xf_man Tipo de datos REAL TIME TIME REAL REAL Significado Amplificacin de la realimentacin Constante de tiempo de la realimentacin rpida Constante de tiempo de la realimentacin lenta Histresis del conmutador de dos puntos Valor de reseteado de la realimentacin en % (0 - 100)
238
33002250
PCON2: Regulador de dos puntos
Descripcin detallada
Estructura del regulador
Estructura del regulador de dos puntos:
Y ERR_EFF SP
+ + -
PV
xf
+ -
xf1
gain G ( s ) = ------------------------------------1 + lag_neg s
xf2
gain G ( s ) = ------------------------------------1 + lag_pos s
Principio del regulador de dos puntos
Al autntico regulador de dos puntos se le aaden 2 realimentaciones dinmicas (unidades PT1). Gracias a una eleccin apropiada de las constantes de tiempo de estas unidades de realimentacin, el regulador de dos puntos tiene un comportamiento dinmico que corresponde al de un regulador PID.
Y ERR_EFF SP
+ + 0 1
PV Xf hys ERR_EFF
33002250
239
PCON2: Regulador de dos puntos
Realimentacin
El juego de parmetros de realimentacin, compuesto de la amplificacin de realimentacin gain y las constantes de tiempo de realimentacin lag_neg y lag_pos, posibilita una aplicacin universal de este regulador de dos puntos. La siguiente tabla ofrece informacin ms precisa:
Realimentacin Comportamiento de 2 puntos (sin realimentacin) Realimentacin negativa Realimentacin negativa + positiva Advertencia, debido al acoplamiento (realimentacin neg. con lag_pos) Advertencia, debido al acoplamiento (realimentacin pos. desconectada) lag_neg =0 >0 >0 =0 > lag_pos lag_pos =0 =0 > lag_neg >0 >0
Se debe elegir la amplificacin de realimentacin gain mayor que cero. Para xf_man (significado entre 0% y 100%) debern indicarse valores entre 0 y 100.
Histresis
El parmetro hys indica la histresis de conmutacin, o sea, el valor en que se debe disminuir el valor de conmutacin efectivo ERR_EFF, partiendo del punto de conmutacin hys/2, antes de que la salida Y se ponga de nuevo a "0". La dependencia de la salida Y con el valor de conmutacin efectivo ERR_EFF y el parmetro hys se explica en el diagrama Principio del regulador de dos puntos, p. 239. El valor del parmetro hys se ajusta normalmente al 1% del rango mximo de regulacin [mx. (SP - PV)]. Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidad de servicio Automtico Manual man 0 1 halt 0 01 Significado El bloque de funcin se procesar tal y como se ha descrito ms arriba. La salida Y se ajustar al valor YMAN. xf1 y xf2 se calcularn de acuerdo con la siguiente frmula: xf1 = xf_man * gain /100 xf2 = xf_man * gain /100 La salida Y se mantendr en el ltimo valor. xf1 y xf2 se ajustarn a gain * Y.
Modalidades de servicio
Detenido
240
33002250
PCON2: Regulador de dos puntos
Error de tiempo de ejecucin
Advertencia
En los siguientes casos se emitir una advertencia:
Causas lag_neg = 0 y lag_pos > 0 Comportamiento del regulador El regulador funciona como si slo tuviera una realimentacin negativa con la constante de tiempo lag_pos. El regulador funciona como si slo tuviera una realimentacin negativa con la constante de tiempo lag_neg. El regulador funciona sin realimentaciones internas.
lag_pos < lag_neg > 0
xf_man < 0 o xf_man > 100
33002250
241
PCON2: Regulador de dos puntos
242
33002250
PCON3: Regulador de tres puntos
29
Vista general
Introduccin Contenido:
Este captulo describe el bloque PCON3. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 244 245 247 250
33002250
243
PCON3: Regulador de tres puntos
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin reproduce un regulador de tres puntos que, mediante dos realimentaciones dinmicas, recibe un comportamiento similar a un PID. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin PCON3 dispone de las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Dos realimentaciones internas (retardador de primer orden)
244
l l
33002250
PCON3: Regulador de tres puntos
Representacin
Smbolo
Representacin del bloque:
PCON3
REAL REAL Mode_MH Para_PCON3 BOOL BOOL
SP PV MODE PARA YMAN_POS YMAN_NEG
Y_POS Y_NEG ERR_EFF
BOOL BOOL REAL
Descripcin de parmetros PCON3
Descripcin de parmetros del bloque
Parmetros SP PV MODE PARA YMAN_POS YMAN_NEG Y_POS Y_NEG ERR_EFF Tipo de datos REAL REAL Mode_MH Para_PCON3 BOOL BOOL BOOL BOOL REAL Significado Entrada de valor terico Entrada de valor real Modalidades de servicio Parmetros Valor de posicionado manual para Y_POS Valor de posicionado manual para Y_NEG "1" = magnitud de posicionado positiva en la salida ERR_EFF "1" = magnitud de posicionado negativa en la salida ERR_EFF Valor efectivo de conmutacin
Descripcin de parmetros Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido
33002250
245
PCON3: Regulador de tres puntos
Descripcin de parmetros Para_PCON3
Descripcin de la estructura de datos
Elemento gain lag_neg lag_pos hys db xf_man Tipo de datos REAL TIME TIME REAL REAL REAL Significado Amplificacin de la realimentacin (juego de parmetros de realimentacin) Constante de tiempo de la realimentacin rpida (juego de parmetros de realimentacin) Constante de tiempo de la realimentacin lenta (juego de parmetros de realimentacin) Histresis del conmutador de tres puntos Zona de insensibilidad Valor de reseteado de la realimentacin en % (0 100)
246
33002250
PCON3: Regulador de tres puntos
Descripcin detallada
Estructura del regulador
Estructura del regulador de tres puntos:
Y ERR_EFF SP
+ + -
Y_POS Y Y_NEG
PV
xf
+ -
xf1
gain G ( s ) = ------------------------------------1 + lag_neg s
xf2
gain G ( s ) = ------------------------------------1 + lag_pos s
Aqu rige:
Si ... Y=1 Y=0 Y = -1 Entonces ... Y_POS = 1 Y_NEG = 0 Y_POS = 0 Y_NEG = 0 Y_POS = 0 Y_NEG = 1
33002250
247
PCON3: Regulador de tres puntos
Principio del regulador de tres puntos
Al autntico regulador de tres puntos se le aaden 2 realimentaciones dinmicas (unidades PT1). Gracias a una eleccin apropiada de las constantes de tiempo de estas unidades de realimentacin, el regulador de tres puntos tiene un comportamiento dinmico que corresponde al de un regulador PID.
Y_POS HYS ERR_EFF SP
+ + -1
DB
Y_POS
1 0
PV HYS xf1 xf2
DB
ERR_EFF
Y_NEG
Y_NEG
Realimentacin
El bloque de funcin tiene un juego de parmetros para las realimentaciones internas compuesto por la amplificacin de realimentacin gain y las constantes de realimentacin lag_neg y lag_pos. La siguiente tabla ofrece informacin ms precisa:
Realimentacin Comportamiento de 3 puntos (sin realimentacin) Realimentacin negativa Realimentacin negativa + positiva Advertencia, debido al acoplamiento (realimentacin neg. con lag_pos) Advertencia, debido al acoplamiento (realimentacin pos. desconectada) lag_neg =0 >0 >0 =0 > lag_pos lag_pos =0 =0 > lag_neg >0 >0
El parmetro gain tiene que ser > 0. Se evaluar el valor de la histresis hys y la zona de insensibilidad db. Para xf_man (significado entre -100 y 100%) debern indicarse valores entre -100 y 100.
Zona de insensibilidad
El parmetro db establece el punto de conmutacin para las salidas Y_POS e Y_NEG. Si el valor de conmutacin efectivo ERR_EFF es positivo y se hace mayor que db, la salida Y_POS conmutar de "0" a "1". Si el valor de conmutacin efectivo ERR_EFF es negativo y se hace menor que -db, la salida Y_NEG conmutar de "0" a "1". El valor del parmetro db se ajusta normalmente al 1% del rango de regulacin mximo (mx. SP - PV).
248
33002250
PCON3: Regulador de tres puntos
Histresis
El parmetro hys indica la histresis de conmutacin, o sea, el valor en que se debe disminuir el valor de conmutacin efectivo ERR_EFF, partiendo del punto de conmutacin db, antes de que la salida Y_POS (Y_NEG) se ponga de nuevo a "0". La relacin entre Y_POS e Y_NEG que depende del valor de conmutacin efectivo ERR_EFF y los parmetros db e hys se explica en la figura Principio del regulador de tres puntos, p. 248. El valor del parmetro hys se ajusta normalmente al 0.5% del rango de regulacin mximo (mx. SP - PV). Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidad de servicio Automtico Manual man 0 1 halt 0 01 Significado El bloque de funcin se procesar tal y como se ha descrito ms arriba. Las salidas Y_POS e Y_NEG se ajustan al valor YMAN_POS e YMAN_NEG. Aqu se ha aplicado la lgica de prioridad Y_NEG predomina sobre Y_POS, lo que impide que las dos salidas se puedan ajustar al mismo tiempo. xf1 y xf2 se calculan de acuerdo con la siguiente frmula: xf1 = xf_man * gain /100 xf2 = xf_man * gain /100 En la modalidad de servicio Detenido, las dos salidas Y_POS e Y_NEG conservarn el ltimo valor. xf1 y xf2 se ajustarn a gain * Y.
Modalidades de servicio
Detenido
33002250
249
PCON3: Regulador de tres puntos
Error de tiempo de ejecucin
Aviso de error Advertencia
Si hys > 2 * db se genera un mensaje de error. En los siguientes casos se emitir una advertencia:
Causas lag_neg = 0 y lag_pos > 0 Comportamiento del regulador El regulador funciona como si slo tuviera una realimentacin negativa con la constante de tiempo lag_pos. El regulador funciona como si slo tuviera una realimentacin negativa con la constante de tiempo lag_neg. El regulador funciona sin realimentaciones internas.
lag_pos < lag_neg > 0
xf_man < 0 o xf_man > 100
250
33002250
PD_or_PI: Conmutacin de la estructura PD / PI
30
Vista general
Introduccin Contenido:
Este captulo describe el bloque PD_or_PI. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Diagrama de estructura del bloque de funcin PD_or_PI Descripcin detallada Frmulas detalladas Error de tiempo de ejecucin Pgina 252 253 255 256 259 261
33002250
251
PD_or_PI: Conmutacin de la estructura PD / PI
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin PD_or_PI puede trabajar como regulador PD y como regulador PI. En funcin de la diferencia de regulacin (SP - PV) y de un valor de conmutacin especificable trig_err, se efectuar automticamente una conmutacin de estructura del regulador PD al regulador PI y viceversa. Este EFB se presta especialmente para circuitos de arranque. El regulador reacciona en el momento del arranque de un proceso como regulador P(D), debiendo la magnitud de regulacin alcanzar lo ms rpidamente posible el valor ajustado para la magnitud de guiado. Cuando casi se haya alcanzado el valor terico predeterminado, se conmutar la estructura del regulador y una componente I se ocupar de que desaparezca la diferencia de regulacin restante. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin dispone de las siguientes propiedades: Regulador PI con ajuste independiente de gain, ti Regulador PD con ajuste independiente de gain, td Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Reseteado Antiwindup en servicio con PI Tiempo de retardo de la componente D definible Modalidades de servicio: Manual, Detenido, Automtico Conmutacin manual/automtico sin brusquedad Conmutacin automtica sin brusquedad de servicio PD a PI, y viceversa
252
Funcin de transferencia del regulador PD
La funcin de transferencia del regulador PD es:
td s G(s) = gain_d 1 + ---------------------------------1 + td_lag s
Funcin de transferencia del regulador PI
l l l l l l l l
La funcin de transferencia del regulador PI es:
1 G(s) = gain_i 1 + ----------ti s
33002250
PD_or_PI: Conmutacin de la estructura PD / PI
Representacin
Smbolo
Representacin del bloque:
PD_or_PI
REAL REAL Mode_MH Para_PD_or_PI REAL REAL
SP PV MODE PARA YMAN FEED_FWD
Y ERR STATUS
REAL REAL Stat_MAXMIN
Descripcin de parmetros PD_or_PI
Descripcin de parmetros del bloque
Parmetros SP PV MODE PARA YMAN FEED_FWD Y ERR STATUS Tipo de datos REAL REAL Mode_MH Para_PD_or_PI REAL REAL REAL REAL Stat_MAXMIN Significado Entrada de valor terico (magnitud de guiado) Entrada de valor real (magnitud de regulacin) Modalidad de servicio Parmetros Magnitud de posicionado manual Magnitud de perturbacin Magnitud de posicionado Diferencia de regulacin Estado de salida
Descripcin de parmetros Mode_MH
Descripcin de la estructura de datos
Elemento man halt Tipo de datos BOOL BOOL Significado "1": Modalidad de servicio Manual "1": Modalidad de servicio Detenido
33002250
253
PD_or_PI: Conmutacin de la estructura PD / PI
Descripcin de parmetros Para_PD_or_PI
Descripcin de la estructura de datos
Elemento trig_err gain_d td td_lag gain_i ti ymax ymin Tipo de datos REAL REAL TIME TIME REAL TIME REAL REAL Significado Valor de conmutacin para la conmutacin de regulador de PD a PI Amplificacin proporcional (factor de amplificacin) del regulador PD Tiempo de adelantamiento de valor terico del regulador PD Retardo del tiempo de adelantamiento de valor terico del regulador PD Amplificacin proporcional (factor de amplificacin) del regulador PI Constante de tiempo de posicionado del regulador PI Lmite superior de posicionado Lmite inferior de posicionado
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento qmax qmin Tipo de datos BOOL BOOL Significado "1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
254
33002250
PD_or_PI: Conmutacin de la estructura PD / PI
Diagrama de estructura del bloque de funcin PD_or_PI
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del bloque PD_or_PI:
a) b) Regulador PI SP gain_i + + c) + ti
gain_d PV td, td_lag + +
d)
Regulador PD
a) Reseteado Antiwindup b)
ERR
1 0 -trig_err trig_err
c) 1 0 d) + + ymax ymin
qmax
Servicio control de la qmin modalidad
FEED_FWD YMAN
33002250
255
PD_or_PI: Conmutacin de la estructura PD / PI
Descripcin detallada
Determinacin del valor de conmutacin
La parametrizacin comienza con la determinacin del valor de conmutacin trig_err. Mediante este parmetro se determina cundo el bloque de funcin debe pasar automticamente del servicio PD al servicio PI. Si la diferencia de regulacin ERR = SP - PV se hace menor que el valor de conmutacin trig_err, el regulador conmutar automticamente del servicio PD al servicio PI. Si la diferencia de regulacin ERR se hace mayor que el valor de conmutacin trig_err, el regulador conmutar automticamente del servicio PI al servicio PD. El resultado ser: Regulador PD: ERR > trig_err Regulador PI: ERR trig_err
Regulador PD
Regulador PI
256
l l
A cada tipo de regulador le corresponde un juego de parmetros propio que tambin deber proyectarse. Con la conmutacin de la estructura del regulador tambin se lleva a cabo prcticamente la conmutacin de un juego de parmetros al otro. La conmutacin se efecta sin brusquedad.
La parametrizacin del regulador PD se realiza proyectando la amplificacin proporcional gain_d y el tiempo de adelantamiento de valor terico td. Para el servicio como regulador PD, se retarda la componente D con la constante de tiempo td_lag. La relacin entre td/td_lag se denomina amplificacin diferenciada y se selecciona por lo general entre 3 y 10. La componente D se determina basndose en la diferencia de regulacin ERR, de forma que en caso de modificaciones en la magnitud de guiado (modificaciones en la entrada SP) se produce un salto condicionado por la componente D. La componente D se puede desconectar con td = 0. La parametrizacin del regulador PI se realiza proyectando la amplificacin proporcional gain_i y la constante de tiempo de posicionado ti. En general, para la amplificacin proporcional durante el proceso de arranque con estructura PD se ajusta un valor mayor que en el servicio cuasi-estacionario con estructura PI que le sigue. Este hecho se tiene en cuenta mediante el otorgamiento de dos amplificaciones proporcionales independientes. La componente I se puede desconectar con ti = 0.
33002250
PD_or_PI: Conmutacin de la estructura PD / PI
Limitacin de magnitudes de posicionado
Los valores ymax e ymin limitan la magnitud de posicionado tanto hacia arriba como hacia abajo. Aqu rige: ymin Y ymax qmax y qmin indican cundo se alcanzan los valores lmites o si hay una limitacin de la magnitud de posicionado: qmax = 1 si Y ymax qmin = 1 si Y ymin El lmite superior ymax para la limitacin del valor de la magnitud de posicionado deber seleccionarse mayor que el lmite inferior ymin.
Reseteado Antiwindup
33002250
l l l l
Si tiene lugar una limitacin de las magnitudes de posicionado y la estructura actual del regulador es PI, el reseteado Antiwindup debe encargarse de que la componente integral no pueda rebasar todos los lmites. Esta medida Antiwindup se ejecutar solamente cuando la componente I del regulador no es "0". Los lmites para el Antiwindup son aqu los mismos que para la limitacin de las magnitudes de posicionado. La medida de reseteado Antiwindup corrige la componente I de tal forma, que rija: YI ymin - gain_i * (SP - PV) - FEED_FWD YI ymax - gain_i * (SP - PV) - FEED_FWD
257
PD_or_PI: Conmutacin de la estructura PD / PI
Modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los elementos man y halt.
Modalidad de servicio Automtico man 0 halt 0 Significado La magnitud de posicionado Y se determina mediante el algoritmo discreto PI o PD en funcin de la magnitud de regulacin PV y de la magnitud de guiado SP. La magnitud de posicionado se limita a travs de ymax e ymin. Los lmites de posicionado tambin son al mismo tiempo los lmites para el reseteado Antiwindup. El valor de posicionado manual YMAN se transmite de forma fija a la magnitud de posicionado Y. La magnitud de posicionado se limita a travs de ymax e ymin. Las magnitudes internas sern guiadas de tal forma que el regulador pueda conmutar de Manual a Automtico sin brusquedad. La salida del regulador permanece tal como se encontraba, o sea, el bloque no modifica la magnitud de posicionado Y (el regulador queda detenido). Las magnitudes internas sern guiadas de tal forma, que el regulador contine su marcha sin brusquedad a partir de su posicin actual. La limitacin de las magnitudes de posicionado y la medida Antiwindup son las mismas que en el servicio Automtico. La modalidad de servicio Detenido es apropiada, entre otras cosas, para ajustar la magnitud de posicionado Y a travs de un mando externo, siendo guiadas correctamente las componentes internas en el regulador.
Manual
01
Detenido
258
33002250
PD_or_PI: Conmutacin de la estructura PD / PI
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las siguientes frmulas:
Magnitud Significado Tiempo de exploracin actual Diferencia de regulacin Valor de la diferencia de regulacin del ciclo de exploracin anterior Magnitud de perturbacin Salida actual (modalidad de servicio Detenido) o YMAN (modalidad de servicio manual) Componente D Valor de la componente D del paso de exploracin anterior Componente I Valor de la componente I del paso de exploracin anterior. Componente P
dt ERR ERR ( ol d)
FEED_FWD Y YD
YD ( ol d)
YI
YI ( old )
YP
Diferencia de regulacin
La diferencia de regulacin se determina de la siguiente forma:
ERR = SP PV
Magnitud de posicionado
La magnitud de posicionado se compone de diferentes magnitudes parciales que dependen de las modalidades de servicio:
Y = YP + YI + YD + FEED_FWD
Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir:
ymin Y ymax
33002250
259
PD_or_PI: Conmutacin de la estructura PD / PI
Vista general para el clculo de las componentes de regulacin
A continuacin encontrar una vista general de los diferentes clculos de las componentes de regulacin dependiendo del elemento trig_err:
Tipo de regulador Regulador PI (ERR trig_err) Componentes del regulador YP e YD para las modalidades de servicio Manual, Detenido y Automtico YI para la modalidad de servicio Automtico YI para las modalidades de servicio Manual y Detenido YP e YI para las modalidades de servicio Manual, Detenido y Automtico YD para la modalidad de servicio Automtico YD para las modalidades de servicio Manual y Detenido
Regulador PD (ERR > trig_err)
Regulador PI: YP e YD para todas las modalidades de servicio
YP e YD para la modalidad de servicio Manual, Detenido, Automtico y Cascada se averiguan de la siguiente forma:
YP = gain_i ERR YD = 0
Regulador PI: Componente I para la modalidad de servicio Automtico Regulador PI: Componente I YI para la modalidad de servicio Manual y Detenido Regulador PD: YP e YI para todas las modalidades de servicio
YI para la modalidad de servicio Automtico se averigua de la siguiente forma (ti > 0): dt ERR + ERR ( ol d ) YI = YI ( old ) + gain_i ---- ----------------------------------------ti 2 La componente I se forma de acuerdo a la regla del trapecio. YI para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma:
YI = Y ( YP FEED_FWD )
YP e YD para las modalidades de servicio Manual, Detenido y Automtico se averiguan de la siguiente forma:
YP = gain_d ERR YI = 0
260
33002250
PD_or_PI: Conmutacin de la estructura PD / PI
Regulador PD: Componente D para la modalidad de servicio Automtico Regulador PD: Componente D para las modalidades de servicio Manual y Detenido
El YD para la modalidad de servicio Automtico se averigua de la siguiente forma:
YD ( old ) td_lag + td gain_d ( ERR ERR ( old ) ) YD = ---------------------------------------------------------------------------------------------------------------------------------dt + dt_lag
El YD para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma:
YD = 0
Error de tiempo de ejecucin
Aviso de error
Se efectuar un aviso de error cuando: existe un nmero de coma flotante no vlido en la entrada PV ymax es < ymin
33002250
l l
261
PD_or_PI: Conmutacin de la estructura PD / PI
262
33002250
PDM: Modulacin por duracin de pulso
31
Vista general
Introduccin Contenido:
Este captulo describe el bloque PDM. Este captulo contiene los siguiente apartados:
Apartado Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin Pgina 264 265 266 270
33002250
263
PDM: Modulacin por duracin de pulso
Descripcin breve
Utilizacin del bloque
El mando de los actuadores no slo se realiza mediante magnitudes analgicas, sino tambin a travs de seales de control binarias. La transformacin de valores analgicos en seales de salida binarias se realiza, por ejemplo, mediante modulacin por ancho de pulso (PWM) o modulacin por duracin de pulso (PDM). Aqu la energa media ajustada del actuador (energa de posicionado) tiene que corresponderse con el valor analgico de entrada (X) del bloque de modulacin.
Descripcin de funcionamiento
El bloque de funcin PDM sirve para transformar los valores analgicos en seales de salida digitales. En el caso del bloque de funcin PDM, se emitir una seal 1 de duracin constante dentro de una frecuencia de ciclo que depende del valor analgico X. La energa media ajustada se corresponde con el cociente de la duracin de la conexin t_on y el perodo de frecuencia de ciclo. Para que la energa media ajustada se corresponda tambin con la magnitud de entrada analgica X, tiene que regir lo siguiente:
1 T period --X
Se pueden proyectar EN y ENO como parmetros adicionales.
Generalidades sobre el accionamiento del actuador
El accionamiento binario del actuador se efecta en general mediante dos seales booleanas Y_POS e Y_NEG. Por ejemplo, en el caso de un motor, la salida Y_POS corresponde a la seal "Marcha a la derecha", y la salida Y_NEG a la seal "Marcha a la izquierda". En el caso de un horno, se pueden interpretar las salidas Y_POS e Y_NEG como "Calentar" y "Enfriar". Si el elemento de posicionado es un motor, es posible que en los motores que no tengan autobloqueo haya que enviar un impulso de frenado despus de la seal de conexin, para evitar la marcha en inercia. Para proteger la electrnica de potencia, se debe prever un tiempo de reposo t_pause despus del impulso de conexin t_on y antes del impulso de frenado t_brake, para evitar cortocircuitos.
264
33002250
PDM: Modulacin por duracin de pulso
Frmula
Para un funcionamiento correcto se deben tener en cuenta las siguientes reglas en la parametrizacin:
pos_ t_on + 2 t_pause + t_brake ------------ t_min neg_
y
pos_ pos_ ----------- t_min < ----------- t_max neg_ neg_
Representacin
Smbolo
Representacin del bloque
PDM
REAL BOOL Para_PDM
X R PARA
Y_POS Y_NEG
BOOL BOOL
Descripcin de parmetros PDM
Descripcin de parmetros del bloque
Parmetros X R PARA Y_POS Y_NEG Tipo de datos REAL BOOL Para_PDM BOOL BOOL Significado Magnitud de entrada Modalidad de servicio Reseteado Parmetros Salida para valores positivos de X Salida para valores negativos de X
33002250
265
PDM: Modulacin por duracin de pulso
Descripcin de parmetros Para_PDM
Descripcin de la estructura de datos
Elemento t_on t_pause t_brake pos_up_x pos_t_min pos_lo_x pos_t_max neg_up_x neg_t_min neg_lo_x neg_t_max Tipo de datos TIME TIME TIME REAL TIME REAL TIME REAL TIME REAL TIME Significado Duracin del impulso (en s) Tiempo de pausa (en s) Tiempo de frenado (en s) Valor de borde superior para X positivo Mnima frecuencia de ciclo para Y_POS (par x = pos_up_x) (en s) Valor de borde inferior para X positivo Mxima frecuencia de ciclo para Y_POS (para x = pos_lo_x) (en s) Valor de borde superior para X negativo Mnima frecuencia de ciclo para Y_NEG (para x = neg_up_x) (en s) Valor de borde inferior para X negativo Mxima frecuencia de ciclo para Y_NEG (para x = neg_lo_x) (en s)
Descripcin detallada
Modo de funcionamiento del mdulo
La duracin del impulso t_on determina el tiempo durante el que la salida Y_POS o Y_NEG poseen seal 1. En el caso de seal de entrada X positiva, se utilizar la salida Y_POS, en el caso de seal de entrada X negativa se utilizar la salida Y_NEG. Slo llevar seal 1 una salida cada vez. En determinadas circunstancias se deber prever entre los impulsos de accionamiento y de frenado un tiempo de pausa de t_pause = 10 20 ms para proteger la electrnica de potencia (evitar el encendido simultneo de vlvulas rectificadoras conectadas en antiparalelo). A la duracin del impulso se le agrega, despus de un tiempo de pausa t_pause, un posible impulso de frenado durante el tiempo t_brake. Dentro del tiempo de pausa ambas salidas poseen la seal 0. Durante el tiempo de frenado, la salida contraria al impulso anterior llevar la seal 1. Un tiempo de pausa de t_pause = 20 ms (t_pause = 0.02) corresponde a un bloqueo del control del ngulo de avance de dos semiondas. De esta manera se garantiza una distancia de seguridad lo suficientemente grande como para evitar cortocircuitos o la activacin del circuito de proteccin debido al encendido de las vlvulas en antiparalelo. A continuacin tiene lugar un perodo durante el que ambas salidas tienen seal 0 (tiempo de espera).
266
33002250
PDM: Modulacin por duracin de pulso
Duracin del perodo t period
Este tiempo de espera, junto con el tiempo de impulso, el tiempo de pausa y el tiempo de frenado tienen como resultado una duracin de perodo t period que se calcula en funcin de lo_x y t_min de acuerdo con las siguientes ecuaciones:
Condiciones lo_x <> 0 Ecuacin Explicacin de las magnitudes de las frmulas up_x lo_x K = ( t_ max t_m in ) ------------------------------u p_x lo_x Kt0 = t_m ax ----------lo_x lo_x = 0 t_min > 0 K tp eriod = ----------------X X0 t_m ax lo _x t_min up_x X0 = ---------------------------------------------------------------------------t_ max t_m in K = t_ min ( up_x X0 ) p eriod
p eriod
K = t + --0 X
lo_x = 0 t_min = 0
X = t_ max 1 -----------up_x
En los tres casos rige:
Condicin lo_x pos_lo_x neg_lo_x up_x pos_up_x neg_up_x t_min pos_t_min neg_t_min t_max pos_t_max neg_t_max
X pos_lo_x X neg_lo_x
Nota: Los parmetros up_x (-pos/-neg) y lo_x (-pos/-neg) evalan el valor respectivo.
33002250
267
PDM: Modulacin por duracin de pulso
Frecuencia de ciclo
El parmetro t_min (hay un valor diferente para cada salida) indica la duracin mnima del perodo, o sea, el tiempo que transcurre desde el comienzo de un impulso de posicionado hasta el comienzo del siguiente. Este tiempo de duracin se ajusta cuando la entrada X supera el valor up_x (tambin aqu hay un valor diferente para cada salida). El parmetro t_max indica el lmite superior de la duracin mxima del perodo. Si la entrada no llega al valor pos_lo_x o neg_lo_x, no se emitir ningn impulso de posicionado hasta que la entrada vuelva a ser mayor que el valor pos_lo_x o neg_lo_x. En principio, los valores pos_lo_x y neg_lo_x determinan una zona de insensibilidad dentro de la cual el mdulo de funcin no ajusta sus salidas. Los parmetros (pos_t_min, pos_up_x) y (pos_t_max, pos_lo_x) rigen para seales de entrada X positivas. Aqu se utilizar la salida Y_POS. Los parmetros (neg_t_min, neg_up_x) y (neg_t_max, neg_lo_x) rigen para seales de entrada X negativas. Aqu se utilizar la salida Y_NEG.
Representacin de las relaciones temporales
La siguiente figura muestra la relacin que existe entre los tiempos:
Y_POS
t_max t-pause t_on t t_brake t_min t_period
Frecuencia variable
1 0 -1
Y_NEG
Dependencia de la duracin
La dependencia de la duracin durante la cual la salida Y_POS (Y_NEG) tiene seal 1 respecto a la magnitud de entrada X se representa en las figuras "Dependencia de las salidas de X, p. 269" y "Dependencia de las salidas de X (caso especial), p. 269 ".
268
33002250
PDM: Modulacin por duracin de pulso
Dependencia de las salidas de X
La siguiente figura representa la forma en la que las salidas dependen de X:
t_period (Y_POS) = f(x) pos_t _max Y_POS
neg_up_x
pos_t_min neg_lo_x pos_lo_x neg_t_min
pos_up_x X
t_period (Y_NEG) = f(x) Y_NEG neg_t_max
Dependencia de las salidas de X (caso especial)
En la siguiente figura se representa el caso especial t_min = 0, lo_x = 0:
t_period (Y_POS) = f(x) pos_t_max Y_POS
neg_up_x pos_up_x
t_period (Y_NEG) = f(x) Y_NEG neg_t_max
33002250
269
PDM: Modulacin por duracin de pulso
Modalidades de servicio
En la modalidad de servicio Reseteado R = 1, las salidas Y_POS e Y_NEG se ponen a cero. Los contadores de tiempos internos se normalizan tambin de forma que, al pasar a R = 0, el mdulo de funcin empiece en la salida correspondiente con la emisin de una nueva seal 1. Si se opera el mdulo de funcin PDM junto con un regulador PID, se debera elegir la duracin del perodo mxima t_max de tal forma, que se corresponda con el tiempo de exploracin de dicho regulador PID. De esta manera se garantiza que se pueda procesar por completo cada nueva seal de posicionado del regulador PID dentro de la duracin del perodo. El tiempo de exploracin del PDM se debera elegir en funcin de la resolucin del tiempo de impulso con respecto a la duracin del perodo. Con l se determina el mnimo impulso de posicionado posible. Se recomienda como mnimo la siguiente relacin: t_max/Tiempo de exploracin (PDM) 10
Condiciones lmite
Error de tiempo de ejecucin
Aviso de error
Se efectuar un aviso de error cuando: |up_x| |lo_x| t_max t_min
270
l l
33002250
Descripciones EFB (PI hasta Z)
III
Vista general
Introduccin
Las descripciones EFB estn reunidas por orden alfabtico.
Nota: La cantidad de entradas de algunos EFB se puede ampliar mediante grandes modificaciones verticales del smbolo FFB a un mximo de 32. Consulte la descripcin de cada EFB para saber de cul se trata.
33002250
271
Descripciones EFB (PI hasta Z)
Contenido
Esta parte contiene los siguientes captulos:
Captulo
32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63
Nombre del captulo
PI: Regulador PI: PI1: Regulador PI: PI_B: Regulador PI simple PID: Regulador PID PID1: Regulador PID PID_P: Regulador PID con estructura paralela PID_PF: Regulador PID con estructura paralela PIDFF: Regulador PID completo PIDP1: Regulador PID con estructura paralela PIP: Regulador PIP en cascada PPI: Regulador PPI en cascada PWM: Modulacin por ancho de pulso PWM1: Modulacin por ancho de pulso QDTIME: Unidad de tiempo muerto QPWM: Modulacin por ancho de pulso (simple) RAMP: Generador de rampas RATIO: Regulador proporcional SCALING: Escalado SCON3: Regulador de tres puntos de a pasos SERVO: Control para servomotores elctricos SMOOTH_RATE: Diferenciador con alisamiento SP_SEL: Conmutador de valor terico SPLRG: Control de dos actuadores STEP2: Regulador de dos puntos STEP3: Regulador de tres puntos SUM_W: Sumador THREEPOINT_CON1: Regulador de tres puntos THREE_STEP_CON1: Regulador de tres puntos de a pasos TOTALIZER: Integrador TWOPOINT_CON1: Regulador de dos puntos VEL_LIM: Limitador de crecimiento VLIM: Limitador de crecimiento de primer orden
Pgina
273 283 293 307 321 335 347 359 387 397 409 419 429 437 443 451 457 463 467 473 489 495 503 509 515 521 525 533 539 549 555 561
272
33002250
PI: Regulador PI:
32
Vista general
Introduccin Contenido:
Este captulo describe el bloque PI. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas Parametrizacin Modalidades de servicio Ejemplo de un regulador PI Error de tiempo de ejecucin
Pgina
274 275 277 278 280 281 282
33002250
273
PI: Regulador PI
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa un regulador PI simple. Entre la magnitud de guiado SP y la magnitud de regulacin PV se forma una diferencia de regulacin ERR. Esta diferencia de regulacin ERR provoca una variacin de la magnitud de posicionado Y. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Conmutacin manual/automtico sin brusquedad Limitacin de magnitudes de posicionado Reseteado Antiwindup (si est activa la componente I)
274
l l l l
33002250
PI: Regulador PI
Representacin
Smbolo
Representacin del bloque:
PI
REAL REAL Mode_MH Para_PI REAL
SP PV MODE PARA YMAN
Y ERR STATUS
REAL REAL Stat-MAXMIN
Descripcin de parmetros PI
Descripcin de parmetros del bloque
Parmetros
SP PV MODE PARA YMAN Y ERR STATUS
Tipo de datos
REAL REAL Mode_MH Para_PI REAL REAL REAL Stat_MAXMIN
Significado
Entrada de valor terico / magnitud de guiado Entrada de valor real / magnitud de regulacin Modalidad de servicio Parmetros Valor manual Magnitud de posicionado Diferencia de regulacin Estado de la salida Y
Descripcin de parmetros Mode_MH
Descripcin de la estructura de datos
Elemento
man halt
Tipo de datos
BOOL BOOL
Significado
"1": Modalidad de servicio Manual "1": Modalidad de servicio Detenido
33002250
275
PI: Regulador PI
Descripcin de parmetros Para_PI
Descripcin de la estructura de datos
Elemento
gain ti ymax ymin
Tipo de datos
REAL TIME REAL REAL
Significado
Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Lmite superior de posicionado Lmite inferior de posicionado
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento
qmax qmin
Tipo de datos
BOOL BOOL
Significado
"1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
276
33002250
PI: Regulador PI
Frmulas
Funcin de transferencia
La funcin de transferencia es:
1 G(s) = gain 1 + ----------ti s
Frmulas de clculos
Las frmulas de clculo son:
YP = gain ERR dt ERR( new ) + ERR ( old ) YI ( ne w ) = YI ( old ) + gain ---- ----------------------------------------------------ti 2
Seal de salida Y
La seal de salida Y ser:
Y = YP + YI
La componente I se forma de acuerdo a la regla del trapecio.
Explicacin de las magnitudes de las frmulas
En las siguientes tablas encontrar el significado de las magnitudes de las frmulas:
Magnitud Significado
Tiempo de exploracin actual Diferencia de regulacin (SP - PV) Valor de la diferencia de regulacin del ciclo de exploracin anterior Componente I Componente P
dt ERR ERR ( old )
YI YP
33002250
277
PI: Regulador PI
Parametrizacin
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del regulador PI:
ERR
SP + PV ERR
gain
a)
b)
a)
Reseteado Antiwindup ti I YP YI + b) + ymax ymin qmax Servicio control de la qmin modalidad Y
YMAN
Parametrizacin
La estructura del regulador PI se representa en el Diagrama de estructura, p. 278 superior. La parametrizacin del bloque de funcin se efecta en primer lugar mediante los parmetros PI puros: la amplificacin proporcional gain y la constante de tiempo de posicionado ti. La componente I se puede desconectar poniendo ti a cero. Los valores ymax e ymin limitan la salida tanto hacia arriba como hacia abajo. De esta forma rigen ymin Y ymax. Si se llega a los valores lmite o si hay limitacin de la seal de salida se indicar mediante las marcas qmax y qmin: qmax = 1 si Y ymax qmin = 1 si Y ymin
Limitacin de magnitudes de posicionado
278
l l
Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir: ymin Y ymax
33002250
PI: Regulador PI
Reseteado Antiwindup
Si tiene lugar una limitacin de las magnitudes de posicionado, el reseteado Antiwindup deber encargarse de que la componente integral no pueda rebasar todos los lmites. La medida Antiwindup se ejecutar solamente cuando la componente I del regulador no se encuentre desconectada. Los lmites para el Antiwindup son aqu los mismos que para la limitacin de las magnitudes de posicionado. La medida de reseteado del Anti-Windup corrige la componente I de tal forma que: ymin - YP YI ymax - YP
33002250
279
PI: Regulador PI
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio que se seleccionan mediante los elementos man y halt.
Modalidad de servicio
Automtico Manual Detenido
man
0 1 0
halt
0 10 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico, la salida de posicionado Y se determina mediante la regulacin en funcin de la magnitud de regulacin PV y de la magnitud de guiado SP. La magnitud de posicionado est limitada por ymax e ymin. Los lmites de posicionado tambin son al mismo tiempo lmites para el reseteado AntiWindup. La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad, debido a que la salida Y puede adoptar cualquier valor entre ymax e ymin, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. Pero si la conmutacin debe tener lugar sin brusquedad, existen dos posibilidades que se aclaran a modo de ejemplo para un regulador PID (vase Conmutacin de Automtico a Manual, p. 315 ).
Modalidad de servicio Manual
En la modalidad de servicio Manual se transmite el valor de posicionado manual YMAN de forma fija a la salida de posicionado Y. No obstante, la magnitud de posicionado se limita a travs de ymax e ymin. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). Los lmites de posicionado tambin son al mismo tiempo lmites para el reseteado Anti-Windup. En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba y el bloque de funcin no modifica la salida de regulacin Y (el regulador permanece detenido), o sea Y = Y(old). Las magnitudes internas sern guiadas de tal manera que la suma de sus componentes se corresponda con la magnitud de posicionado y el regulador siga su marcha sin brusquedad a partir de su posicin actual. Los lmites de posicionado tambin son al mismo tiempo lmites para el reseteado Anti-Windup. La modalidad de servicio Detenido es apropiada, entre otras cosas, para ajustar la magnitud de posicionado Y a travs de un mando externo, siendo guiadas correctamente las componentes internas en el regulador.
Modalidad de servicio Detenido
280
33002250
PI: Regulador PI
Ejemplo de un regulador PI
Ejemplo
En la siguiente figura (vase Respuesta a escaln del regulador PI, p. 281) se representa como ejemplo la respuesta a escaln del regulador PI. En la primera parte de la figura se representa la reaccin del bloque de funcin a la modalidad de servicio MANUAL: La salida Y salta al valor YMAN. En la segunda parte de la figura se muestra la reaccin del bloque de funcin en servicio automtico (MAN = 0 y HALT= 0), tanto con una diferencia de regulacin ERR positiva como negativa. Si la diferencia de regulacin positiva es constante, la Y asciende en forma de rampa hasta alcanzar el lmite de posicionado superior. A continuacin, Y se limitar al valor ymax. Esta limitacin se avisa a travs de qmax. La diferencia de regulacin salta ahora a un valor negativo cuyo valor absoluto es mayor que el valor anterior. Debido a la componente P, la salida salta segn el valor gain ( ERR ( new ) ERR ( ol d ) ) ; a continuacin la Y descender en forma de rampa. En trminos absolutos, el ascenso es aqu mayor que anteriormente con la diferencia de regulacin positiva. Esto se debe a que ahora el valor absoluto de la diferencia de regulacin es mayor.
Respuesta a escaln del regulador PI
Representacin de la respuesta a escaln del regulador PI
ymax Y
yman 0
ERR
1 0 1 0 1 0
man halt qmax
33002250
281
PI: Regulador PI
Error de tiempo de ejecucin
Aviso de error
Se efectuar un aviso de error cuando: haya un nmero de coma flotante no permitido en la entrada YMAN o X, ymax es < ymin.
282
l l
33002250
PI1: Regulador PI
33
Vista general
Introduccin Contenido:
Este captulo describe el bloque PI1. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas Parametrizacin Modalidades de servicio Ejemplo del regulador PI1 Error de tiempo de ejecucin
Pgina
284 285 286 287 289 290 291
33002250
283
PI1: Regulador PI
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa un regulador PI simple. Entre el valor terico SP y la magnitud de regulacin PV surge una diferencia de regulacin ERR. Esta diferencia de regulacin ERR provoca una variacin de la magnitud de posicionado Y. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Conmutacin manual/automtico sin brusquedad Limitacin de magnitudes de posicionado Reseteado Antiwindup Medida Antiwindup slo si est activa la componente I
284
l l l l l
33002250
PI1: Regulador PI
Representacin
Smbolo
Representacin del bloque:
PI1
BOOL BOOL REAL REAL REAL TIME REAL REAL REAL
MAN HALT SP PV GAIN TI YMAX YMIN YMAN
Y ERR QMAX QMIN
REAL REAL BOOL BOOL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros
MAN HALT SP PV GAIN TI YMAX YMIN YMAN Y ERR QMAX QMIN
Tipo de datos
BOOL BOOL REAL REAL REAL TIME REAL REAL REAL REAL REAL BOOL BOOL
Significado
"1": Modalidad de servicio Manual "1": Modalidad de servicio Detenido Entrada de valor terico Magnitud de entrada Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Lmite superior de posicionado Lmite inferior de posicionado Valor manual Magnitud de posicionado Salida de diferencia de regulacin "1" = Salida Y alcanz el lmite de posicionado superior "1" = Salida Y alcanz el lmite de posicionado inferior
33002250
285
PI1: Regulador PI
Frmulas
Funcin de transferencia
La funcin de transferencia es:
33002250
1 G(s) = GAIN 1 + ------------TI s
La componente I se puede desconectar poniendo TI a cero.
Frmulas de clculos
Las frmulas de clculo son:
YP = GAIN ERR dt- ERR ( new ) + ERR ( old) YI ( ne w ) = YI ( old ) + GAIN ----- ----------------------------------------------------TI 2
Seal de salida Y
La seal de salida Y ser:
Y = YP + YI
La componente I se forma de acuerdo a la regla del trapecio.
Explicacin de las magnitudes de las frmulas
En las siguientes tablas encontrar el significado de las magnitudes de las frmulas:
Magnitud Significado
Tiempo de exploracin actual Diferencia de regulacin (SP - PV) Valor de la diferencia de regulacin del ciclo de exploracin anterior Componente I Componente P
dt ERR ERR ( ol d )
YI YP
286
PI1: Regulador PI
Parametrizacin
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del regulador PI1:
ERR
SP + PV ERR
gain
a)
b)
a)
Reseteado Antiwindup ti I YP YI + b) + ymax ymin qmax Servicio control de la qmin modalidad Y
YMAN
Parametrizacin
La estructura del regulador PI1 se representa en el Diagrama de estructura, p. 287 superior. La parametrizacin del mdulo de funcin se efecta en primer lugar mediante los parmetros PI puros: la amplificacin proporcional GAIN y la constante de tiempo de posicionado TI. Los lmites YMAX e YMIN limitan la salida tanto hacia arriba como hacia abajo. De esta manera rige YMIN Y YMAX. Se visualiza a travs de ambas marcas QMAX y QMIN cuando se alcanzan los valores lmites o una limitacin de la seal de salida: QMAX = 1 si Y YMAX QMIN = 1 si Y YMIN
Limitacin de magnitudes de posicionado
33002250
l l
Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir: YMIN Y YMAX
287
PI1: Regulador PI
Reseteado Antiwindup
Si tiene lugar una limitacin de las magnitudes de posicionado, el reseteado Antiwindup deber encargarse de que la componente integral no pueda rebasar todos los lmites. La medida Antiwindup se ejecutar solamente cuando la componente I del regulador no se encuentre desconectada. Los lmites para el Antiwindup son aqu los mismos que para la limitacin de las magnitudes de posicionado. La medida de reseteado del Anti-Windup corrige la componente I de tal forma que: YMIN - YP YI YMAX - YP
288
33002250
PI1: Regulador PI
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT.
Modalidad de servicio
Automtico Manual Detenido
MAN
0 1 0
HALT
0 10 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico, la salida de posicionado Y se determina mediante la regulacin en funcin de la magnitud de regulacin PV y de la magnitud de guiado SP. La magnitud de posicionado est limitada por YMAX e YMIN. Los lmites de posicionado tambin son al mismo tiempo lmites para el reseteado AntiWindup. La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad debido a que la salida Y puede adoptar cualquier valor entre YMAX e YMIN, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. Pero si la conmutacin debe tener lugar sin brusquedad, existen dos posibilidades que se aclaran a modo de ejemplo para un regulador PID1 (vase Conmutacin de Automtico a Manual, p. 329).
Modalidad de servicio Manual
En la modalidad de servicio Manual se transmite el valor de posicionado manual YMAN de forma fija a la salida de posicionado Y. No obstante, la magnitud de posicionado est limitada por YMAX e YMIN. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). Los lmites de posicionado tambin son al mismo tiempo lmites para el reseteado Anti-Windup. En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba y el bloque de funcin no modifica la salida de regulacin Y (el regulador permanece detenido), o sea Y = Y(old). Las magnitudes internas sern guiadas de tal manera que la suma de sus componentes se corresponda con la magnitud de posicionado y el regulador siga su marcha sin brusquedad a partir de su posicin actual. Los lmites de posicionado tambin son al mismo tiempo lmites para el reseteado Anti-Windup.
Modalidad de servicio Detenido
33002250
289
PI1: Regulador PI
Ejemplo del regulador PI1
Ejemplo
En la siguiente figura (vase Respuesta a escaln del regulador PI1, p. 290) se representa como ejemplo la respuesta a escaln del regulador PI1. En la primera parte de la figura se representa la reaccin del bloque de funcin a la modalidad de servicio MANUAL: La salida Y salta al valor YMAN. En la segunda parte de la figura se muestra la reaccin del bloque de funcin en servicio automtico (MAN = 0 y HALT= 0), tanto con una diferencia de regulacin ERR positiva como negativa. Si la diferencia de regulacin positiva es constante, la Y asciende en forma de rampa hasta alcanzar el lmite de posicionado superior. A partir de ahora, la salida se limitar al valor de YMAX. La limitacin se indica en la marca QMAX. La diferencia de regulacin salta ahora a un valor negativo cuyo valor absoluto es mayor que el valor anterior. Debido a la componente P, la salida salta segn el valor GAIN ( ERR ( new ) ERR ( ol d ) ) ); a continuacin la Y descender en forma de rampa. En trminos absolutos, el ascenso es aqu mayor que anteriormente con la diferencia de regulacin positiva. Esto se debe a que ahora el valor absoluto de la diferencia de regulacin es mayor.
Respuesta a escaln del regulador PI1
Representacin de la respuesta a escaln del regulador PI1
YMAX Y
YMAN 0
ERR
1 0 1 0 1 0
MAN HALT QMAX
290
33002250
PI1: Regulador PI
Error de tiempo de ejecucin
Aviso de error
En YMAX < YMIN se efecta un aviso de error.
33002250
291
PI1: Regulador PI
292
33002250
PI_B: Regulador PI simple
34
Vista general
Introduccin Contenido:
Este captulo describe el bloque PI_B. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas Parametrizacin Ecuaciones detalladas Error de tiempo de ejecucin
Pgina
294 295 297 298 302 304
33002250
293
PI_B: Regulador PI simple
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin PI_B representa un algoritmo PI con estructura mixta (serie/ paralelo). Sus funcionalidades han surgido de las del bloque de funcin PIDFF (vase PIDFF: Regulador PID completo, p. 359). Estas funcionalidades permiten al bloque de funcin ejecutar la mayora de las aplicaciones clsicas de regulacin sin perder manejabilidad o requerir demasiados recursos. En las tareas de regulacin difciles, que precisan funciones de regulacin ampliadas, debera utilizarse el bloque PIDFF. Se pueden proyectar EN y ENO como parmetros adicionales.
Funcionalidades
Las funcionalidades ms importantes del bloque de funcin PI_B son las siguientes: Clculo de la componente proporcional e integral de forma incremental Valor real, valor terico y valor de salida en unidades fsicas Accin directa o inversa Posibilidad de desconexin de una componente I externa al bloque (entrada RCPY) Zona de insensibilidad en variacin Salida de valor incremental y de valor absoluto Valor lmite superior e inferior de la seal de salida Offset de salida Seleccin de la modalidad de servicio Manual / Automtico Servicio Tracking Valor lmite superior e inferior del valor terico
Funcionalidades ampliadas
294
l l l l l l l l l l l l l l
Como en el PIDFF, se pueden ampliar estas funcionalidades por medio de la utilizacin adicional de otros bloques de funcin. Ajuste automtico del regulador por medio del bloque AUTOTUNE Seleccin de un valor terico interno o externo por medio del bloque SP_SEL Control del servicio manual de los circuitos de regulacin explorados (vase Exploracin, p. 36) por medio del bloque de funcin MS
33002250
PI_B: Regulador PI simple
Representacin
Smbolo
Representacin del bloque:
PI_B
REAL REAL REAL BOOL Para_PI_B REAL BOOL
OUT PV SP OUTD RCPY MA_O MAN_AUTO DEV STATUS PARA TR_I TR_S
REAL REAL DATA REAL WORD
Descripcin de parmetros PI_B
Descripcin de parmetros del bloque
Parmetros
PV SP RCPY MAN_AUTO
Tipo de datos
REAL REAL REAL BOOL
Significado
Valor real (Process Value) Valor terico (Set Point) Copia de la magnitud de posicionado efectiva Regulador de modalidad de servicio: "1" : Servicio Automtico "0" : Servicio Manual Parmetros Entrada de inicializacin Comando de inicializacin Salida del actuador Salida diferencial: Diferencia entre la salida de la ejecucin actual y la anterior Modalidad de servicio actual del bloque de funcin: "1" : Modalidad de servicio Automtico "0" : otra modalidad de servicio (es decir, servicio Manual o Tracking) Valor de variacin (PV - SP) Palabra de estado
PARA TR_I TR_S OUT OUTD MA_O
Para_PI_B REAL BOOL REAL REAL BOOL
DEV STATUS
REAL WORD
33002250
295
PI_B: Regulador PI simple
Descripcin de parmetros Para_PI_B
Descripcin de la estructura de datos
Elemento
id pv_inf pv_sup out_inf out_sup rev_dir en_rcpy kp ti dband outbias
Tipo de datos
UINT REAL REAL REAL REAL BOOL BOOL REAL TIME REAL REAL
Significado
Reservado para el ajuste automtico del regulador Lmite inferior del rango del valor real Lmite superior del rango del valor real Lmite inferior del rango del valor de salida Lmite superior del rango del valor de salida "1" : Accin directa del regulador PID "0" : Accin inversa del regulador PID "1" : la entrada RCPY se utilizar Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Zona de insensibilidad en variacin Compensacin manual de la variacin esttica
296
33002250
PI_B: Regulador PI simple
Frmulas
Funcin de transferencia
La funcin de transferencia es:
1 OUT = kp 1 + ------------ IN ti p
Frmulas de clculos
Las frmulas utilizadas realmente varan dependiendo de que el bloque de funcin utilice el algoritmo incremental o el absoluto. De forma muy simplificada podr utilizar el bloque de funcin una de las siguientes frmulas:
Algoritmo
Absoluto
ti
0
Formas
OUT = TermP + outbias OUTD = OUT ( new ) OUT ( old )
Incremental
>0
OUTD = TermP + TermI OUT = OUT ( old ) + OUTD ( new )
Explicacin de las magnitudes de las frmulas
En las siguientes tablas encontrar el significado de las magnitudes de las frmulas:
Magnitud
(new) (old) OUT OUTD TermI TermP
Significado
Valor, que se calcular en la ejecucin actual del bloque de funcin Valor, que se calcul en la ejecucin anterior del bloque de funcin Salida del valor absoluto Salida del valor incremental Valor de la componente integral (dependiente del algoritmo) Valor de la componente proporcional (dependiente del algoritmo)
33002250
297
PI_B: Regulador PI simple
Parametrizacin
Diagrama de estructura del regulador PI_B
Diagrama de estructura del regulador PI_B
Proportional action kp DEV + ti, K dband + a)
pv_sup SP pv_inf
Integral action
PV + + rev_dir outbias
a)
Reverse Direct
Man Auto MAN_AUTO out_sup Limiter TR_I TR_S Tracking out_inf OUT
Algoritmos absolutos
El algoritmo absoluto se utiliza si no existe ninguna componente I (cuando ti = 0). En este caso, se calcula en primer lugar la salida OUT y de ah se deduce la modificacin de la salida.
298
33002250
PI_B: Regulador PI simple
Algoritmos incrementales
Los algoritmos incrementales se utilizan cuando existe una componente I (es decir, cuando ti > 0). La particularidad de este algoritmo consiste en calcular en primer lugar la modificacin de la salida OUTD y, a continuacin, determinar la salida del valor absoluto por medio de la siguiente frmula: OUT ( new ) = OUT ( old ) + OUTD En este algoritmo se puede conmutar posteriormente un bloque de funcin SERVO al regulador, lo cual permite una regulacin asttica. El algoritmo incremental permite adems realizar el proyecto de una componente integral externa al bloque en aplicaciones de regulacin en las que el comportamiento real aplicado vara respecto al comportamiento calculado por el regulador (en caso de estar abierto el circuito de regulacin). En este caso representa una ventaja utilizar el valor real en el clculo. Si este est disponible se deber abrir por conmutacin para la entrada RCPY y se deber poner a 1 el parmetro en_rcpy. As es que durante el clculo, la expresin OUT ( new ) = OUT ( old ) + OUTD se convierte en OUT ( new ) = RCPY + OUTD Esta instalacin es especialmente til en la regulacin de cascadas o similares.
Nota: En modalidad integral externa (en_rcpy=1) no est limitada la salida OUT.
33002250
299
PI_B: Regulador PI simple
Zona de insensibilidad en variacin (dband)
Al alcanzar el punto de trabajo la zona de insensibilidad permite limitar pequeos golpes de restablecimiento frente al valor del actuador: mientras la desviacin permanezca inferior a dband (en valores absolutos) el bloque de funcin la considerar nula para sus clculos. Representacin de la zona de insensibilidad en variacin (dband)
Desviacin modificada
dband
DEV
300
l l l l l
Otras caractersticas
El bloque dispone adems de las siguientes propiedades: La utilizacin del parmetro outbias permite un ajuste preciso en el punto de trabajo si no existe ninguna accin integral (ti = 0). En todas las modalidades se limita la salida OUT al sector comprendido entre out_inf y out_sup. Si el valor calculado por el bloque de funcin (o escrito por el usuario en modalidad manual) supera uno de estos lmites, se recortar el valor de OUT. En cambio, la salida incremental OUTD no tendr jams en consideracin este recorte. Esto permite al PI_B controlar a un bloque de funcin SERVO sin necesidad de sensado de la posicin del actuador (regulacin flotante). La seleccin de la accin directa / inversa (parmetro rev_dir) permite adaptar el sentido del regulador a la vinculacin actuador / proceso de medicin. Limitacin del valor terico entre pv_inf y pv_sup. El bloque puede funcionar en modalidad integral pura (con kp = 0).
33002250
PI_B: Regulador PI simple
Modalidades de servicio
El bloque de funcin PI_B dispone de 3 modalidades de servicio: Automtico, Manual y Tracking. La modalidad Tracking tiene prioridad ante las otras modalidades de servicio. Estas modalidades se pueden seleccionar a travs de las entradas MAN_AUTO y TR_S.
Modalidad de servicio
Automtico
TR_S
0
MAN_AUTO
1
Significado
Las salidas OUT y OUTD se corresponden con el resultado de los clculos efectuados por el bloque. El bloque de funcin no posiciona la salida OUT, de forma que el usuario puede modificar el valor directamente. La entrada TR_I se transfiere a la salida OUT.
Manual
Tracking
01
33002250
l l
Conmutacin de las modalidades de servicio
La conmutacin Manual Automtico o Tracking Automtico se efecta de la siguiente forma: En el algoritmo incremental (ti > 0) la conmutacin se realiza sin brusquedad. En el algoritmo incremental (ti = 0) la conmutacin tiene lugar con brusquedad.
301
PI_B: Regulador PI simple
Ecuaciones detalladas
Denominacin
Las siguientes ecuaciones utilizan distintas variables y funciones. Las variables correspondientes a los parmetros del bloque no se describen aqu. Sin embargo, las variables intermediarias ms importantes y las funciones utilizadas se describen en la siguiente tabla:
Variable intermediaria / funcin
dt (new) (old) TermI TermP sense
Significado
Intervalo de tiempo transcurrido desde la ltima ejecucin del bloque Valor, que se calcular en la ejecucin actual del bloque de funcin Valor, que se calcul en la ejecucin anterior del bloque de funcin Valor de la componente integral (dependiente del algoritmo) Valor de la componente proporcional (dependiente del algoritmo) Sentido de regulacin con las siguientes opciones de direccionado: +1 Se trata de una accin directa (rev_dir = 1), es decir, que una desviacin positiva (PV - SP) genera un crecimiento del valor de salida -1 Se trata de una accin inversa (rev_dir = 0), es decir, que una desviacin positiva (PV - SP) genera una disminucin del valor de salida
Funcin Funcin "limitar"
Algoritmo absoluto
Las siguientes ecuaciones rigen con los correctores proporcionales ( ti = 0);
OUT = TermP + outbias OUTD = OUT ( new ) OUT ( old ) OUT = limiter ( OUT ) TermP = sense kp DEV
302
l l
(x(t)) = x(t) x(t 1)
Funcin de limitacin de la salida del bloque
33002250
PI_B: Regulador PI simple
Algoritmo incremental
Las siguientes ecuaciones rigen con correctores del tipo PI ( ti > 0);
OUTD = TermP + TermI OUT = limiter ( OUT )
Si en_rcpy = 0, rige:
OUT = OUT ( old ) + OUTD ( new ) Si en_rcpy = 1, rige: OUT = RCPY + OUTD ( new )
Valor de la componente proporcional TermP
TermP = sense kp [ (DEV) ]
Valor de la componente integral TermI, si kp > 0:
dt TermI = sense kp ---- DEV ti
Valor de la componente integral TermI, si kp = 0 (modalidad integral pura): out_sup out_inf dt TermI = sense --------------------------------------------- ---- DEV pv_sup pv_inf ti
33002250
303
PI_B: Regulador PI simple
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante Se mostrarn los siguientes comportamientos: La entrada SP se encuentra fuera del rango [pv_inf, pv_sup]: para el clculo, el bloque de funcin utiliza el valor pv_inf, o bien pv_sup. El parmetro kp o dband es negativo: el bloque de funcin utilizar el valor 0 en lugar del valor del parmetro errneo. El parmetro outbias se encuentra fuera del rango [(out_inf - out_sup), (out_sup - out_inf)]. El bloque de funcin utilizar para el clculo el valor (out_inf - out_sup) o bien (out_sup - out_inf). La salida OUT no ha alcanzado el valor lmite inferior out_min (vase Nota) La salida OUT ha alcanzado el valor lmite superior out_max (vase Nota) Los valores lmite pv_inf y pv_sup son idnticos
Bit 5 = 1 Bit 6 = 1 Bit 7 = 1
Nota sobre la salida OUT
Nota: En la modalidad manual estos bits permanecern en 1 slo durante un ciclo del programa. Si el usuario introduce para OUT un valor que supere uno de estos lmites, el bloque de funcin pondr a 1 el bit 5 6 y recortar el valor indicado por el usuario. En la siguiente ejecucin del bloque de funcin el valor de OUT ya no estar fuera del rango y los bits 5 y 6 volvern a estar a cero.
Aviso de error
Se visualizar un error si se detecta un valor no flotante en una entrada, si se presenta un problema en un clculo de valores con coma flotante o si los valores lmite pv_inf y pv_sup son idnticos. Las salidas OUT, OUTD, MA_O y DEV permanecen sin variacin.
304
l l l
33002250
PI_B: Regulador PI simple
Advertencia
En los siguientes casos se emitir una advertencia: Uno de los parmetros kp o dband es negativo: el bloque de funcin utilizar el valor 0 en lugar del valor del parmetro errneo. El parmetro outbias no se encuentra en el rango [(out_inf - out_sup), (out_sup - out_inf)]. El bloque de funcin utilizar para el clculo el valor (out_inf - out_sup) o bien (out_sup - out_inf).
33002250
l l
305
PI_B: Regulador PI simple
306
33002250
PID: Regulador PID
35
Vista general
Introduccin Contenido:
Este captulo describe el bloque PID. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Diagrama de estructura del bloque de funcin PID Parametrizacin del regulador PID Modalidades de servicio Frmulas detalladas Error de tiempo de ejecucin
Pgina
308 309 311 312 314 317 320
33002250
307
PID: Regulador PID
Descripcin breve
Descripcin de funcionamiento
El mdulo de funcin realiza un regulador PID. En virtud de la magnitud de referencia SP y la magnitud de regulacin PV, se forma una diferencia de regulacin ERR. Esta diferencia de regulacin ERR provoca una variacin de la magnitud de posicionado Y. Como parmetros adicionales se pueden configurar EN y ENO.
Propiedades
El mdulo de funcin tiene las siguientes propiedades: Regulador PID real con ajuste independiente de gain, ti y td Modalidades de servicio Manual, Detenido y Automtico Conmutacin sin brusquedad entre Manual/Automtico Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Componentes P, I y D conectables de forma independiente Reseteado Antiwindup Medida Antiwindup slo si est activo el componente I Retardo definible del componente D Componente D conmutable a magnitud de regulacin PV o diferencia de regulacin ERR
Explicacin de las magnitudes:
Magnitud
YD YI YP
Significado
Componente D (slo en caso de en_d = 1) Componente I (slo en caso de en_i = 1) Componente P (slo en caso de en_p = 1)
308
Funcin de transmisin
l l l l l l l l l
La funcin de transmisin es: 1 td s G (s ) = gain 1 + ----------- + ---------------------------------ti s 1 + td_lag s
YD YI YP
33002250
PID: Regulador PID
Representacin
Smbolo
Representacin del bloque:
PID
REAL REAL Mode_PID Para_PID REAL REAL
SP PV MODE PARA FEED_FWD YMAN
Y ERR STATUS
REAL REAL Stat_MAXMIN
Descripcin de parmetros PID
Descripcin de parmetros del bloque
Parmetros
SP PV MODE PARA FEED_FWD YMAN ERR Y STATUS
Tipo de datos
REAL REAL Mode_PID Para_PID REAL REAL REAL REAL Stat_MAXMIN
Significado
Magnitud de guiado Magnitud de regulacin Modalidades de servicio Parmetros Magnitud de perturbacin Valor de posicionado manual Diferencia de regulacin Magnitud de posicionado Estado de la salida Y
33002250
309
PID: Regulador PID
Descripcin de parmetros Mode_PID
Descripcin de la estructura de datos
Elemento
man halt en_p en_i en_d d_on_pv
Tipo de datos
BOOL BOOL BOOL BOOL BOOL BOOL
Significado
"1": Modalidad de servicio Manual "1": Modalidad de servicio Detenido "1": Componente P conectada "1": Componente I conectada "1": Componente D conectada "1": Componente D referida a la magnitud de regulacin; "0": Componente D referida a la diferencia de regulacin
Descripcin de parmetros Para_PID
Descripcin de la estructura de datos
Elemento
gain ti td td_lag ymax ymin
Tipo de datos
REAL TIME TIME TIME REAL REAL
Significado
Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Tiempo de adelantamiento de valor terico Retardo de la componente D Lmite superior de posicionado Lmite inferior de posicionado
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento
qmax qmin
Tipo de datos
BOOL BOOL
Significado
"1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
310
33002250
PID: Regulador PID
Diagrama de estructura del bloque de funcin PID
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del regulador PID
ERR
a) SP gain P
b) + ERR 1 0
Kgain
c) PV 1 0
en_p
a) 1 0 0 1 en_i td, td_lag 0 1 0 c) d_on_pv en_d 1 D YI + ti I
Reseteado Antiwindup
YP + + YD + + ymax ymin
qmax
b)
Servicio control de la qmin modalidad
FEED_FWD
YMAN
33002250
311
PID: Regulador PID
Parametrizacin del regulador PID
Parametrizacin
La estructura del regulador PID se representa en el Diagrama de estructura, p. 311 . La parametrizacin del bloque de funcin se efecta en primer lugar a travs de los parmetros PID puros, es decir, la amplificacin proporcional gain, la constante de tiempo de posicionado ti y tiempo de adelantamiento de valor terico td. La componente D se retarda con el tiempo td_lag. La relacin entre td/td_lag se denomina amplificacin diferenciada y se selecciona por lo general entre 3 y 10. Se puede formar la componente D, ya sea basndose en la diferencia de regulacin ERR (d_on_pv =0) o en la magnitud de regulacin PV (d_on_pv = 1). Si se determina la componente D sobre la base de la magnitud de regulacin PV, no existir ningn salto debido a la componente D, en caso de modificaciones en las magnitudes de guiado (modificaciones en la entrada SP). La componente D tendr influencia solamente en caso de perturbaciones y modificaciones en el proceso.
Inversin del sentido de regulacin
Se puede lograr un comportamiento inverso del regulador cambiando el signo antepuesto en gain. Un valor positivo en gain, provoca que el valor de salida aumente en el caso de una magnitud de perturbacin positiva. Un valor negativo en gain, hace que el valor de salida disminuya en el caso de una magnitud de perturbacin positiva. Los valores ymax e ymin limitan la salida tanto hacia arriba como hacia abajo. De esta forma rigen ymin Y ymax. Se visualiza a travs de las salidas qmax y qmin, cuando se alcanzan los valores lmites, o bien cuando se alcanza una limitacin de la seal de salida: qmax = 1 si Y ymax qmin = 1 si Y ymin El lmite superior ymax para la limitacin de la magnitud de posicionado se debe elegir superior al lmite inferior ymin, de lo contrario el bloque de funcin comunicar un error y no funcionar.
Limitacin de magnitudes de posicionado
312
l l
33002250
PID: Regulador PID
Reseteado Antiwindup
Si tiene lugar una limitacin de las magnitudes de posicionado se debe contemplar mediante el reseteado Antiwindup que la componente integral "no pueda crecer por encima de todos los lmites". La medida Antiwindup se ejecutar solamente cuando la componente I del regulador no se encuentre desconectada. Los lmites para el Antiwindup son aqu los mismos que para la limitacin de las magnitudes de posicionado. No se considera la componente D para la medida Antiwindup, de tal forma, que los picos provocados por la componente D, no se recortarn mediante la medida Antiwindup. La medida de reseteado Antiwindup corrige la componente I de tal forma, que rija: ymin YP FEED_FWD YI ymax YP FEED_FWD
Seleccin de los tipos de reguladores
Existen diferentes tipos de reguladores que se seleccionan a travs de los elementos en_p, en_i y en_d.
Tipo de regulador
Regulador P Regulador PI Regulador PD Regulador PID Regulador I
en_p
1 1 1 1 0
en_i
0 1 0 1 1
en_d
0 0 1 1 0
La componente I tambin se puede desconectar por medio de ti = 0.
33002250
313
PID: Regulador PID
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los parmetros man y halt:
Modalidad de servicio
Automtico Manual Detenido
man
0 1 0
halt
0 01 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico, se determina la magnitud de posicionado Y a travs del algoritmo discreto PID, dependiendo de la magnitud de regulacin PV y la magnitud de guiado SP. La magnitud de posicionado se limita a travs de ymax e ymin. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. En la modalidad de servicio Manual se transmite el valor de posicionado manual YMAN de forma fija a la magnitud de posicionado Y. No obstante, la magnitud de posicionado se limita a travs de ymax e ymin. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
Modalidad de servicio Manual
Modalidad de servicio Detenido
En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba; el bloque de funcin no modifica la magnitud de posicionado Y (el regulador permanece detenido), o sea Y = Y(old). Las magnitudes internas sern guiadas de tal manera, que el regulador (en caso de componente I conectada) contine sin brusquedad su marcha desde su posicin actual. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado AntiWindup. La modalidad de servicio Detenido es apropiada, entre otras cosas, para ajustar la salida de regulacin Y a travs de un mando externo, siendo guiadas correctamente las componentes internas en el regulador. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
314
33002250
PID: Regulador PID
Conmutacin de Automtico a Manual
La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad, debido a que la salida Y puede adoptar cualquier valor entre ymax e ymin, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. Pero si la conmutacin de Automtico a Manual debe tener lugar sin brusquedad, existen dos posibilidades: Conmutacin por medio de la funcin MOVE Conmutacin por medio de un bloque de funcin VLIM limitador de crecimiento
Conmutacin con MOVE
33002250
l l
Ajuste a travs de la funcin MOVE el valor de YMAN al valor de Y:
PID Mode MODE Y Valor manual YMAN Mode.man EN MOVE
Nota: Este tipo de representacin se eligi solamente por razones de claridad para una mejor comprensin. Los vnculos representados con trazos no se pueden programar como links (objetos de vnculo) debido a que forman (en Concept) bucles no permitidos. Las uniones se deben realizar a travs de la programacin con variables.
La funcin MOVE se ejecutar solamente, cuando el regulador PID se encuentre en la modalidad de servicio Automtico (Mode.man = 0). La conmutacin de Automtico a Manual tendr lugar sin brusquedad a continuacin, pues en este ciclo el valor de YMAN es igual al valor de Y. En la modalidad de servicio Manual podr modificar el valor de YMAN lentamente.
315
PID: Regulador PID
Conmutacin con VLIM
Si no desea modificar el valor YMAN -porque es, p. ej., un valor fijo-, puede aplicar la solucin anterior con la ayuda de un limitador de crecimiento (bloque de funcin VLIM):
MOVE MPID.man MVLIM.man
VLIM MVLIM Valor manual Para MODE X PARA YMAN MPID Y
PID MODE Y YMAN
Nota: Este tipo de representacin se eligi solamente por razones de claridad para una mejor comprensin. Los vnculos representados con trazos no se pueden programar como links (objetos de vnculo) debido a que forman (en Concept) bucles no permitidos. Las uniones se deben realizar a travs de la programacin con variables.
En la modalidad de servicio Automtico (MPID.man = 0), se encuentra el limitador de crecimiento en la modalidad de servicio Manual (funcin MOVE). De esta manera se ajustar el valor manual del regulador PID (YMAN de PID) a travs del valor manual del limitador de crecimientos (YMAN de VLIM) al valor Y del regulador PID (guiado). Si ahora tiene lugar una conmutacin de Automtico a Manual, ser sin brusquedad, pues en este ciclo el valor de YMAN (del PID) es igual al valor de Y (del PID). A partir del ciclo siguiente, el valor de YMAN (del PID) se igualar al autntico valor manual (en VLIM) con la adaptacin que haya determinado (Para.rate).
316
33002250
PID: Regulador PID
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las siguientes frmulas:
Magnitud Significado
Diferencia de tiempo entre el ciclo actual y el anterior Diferencia de regulacin (SP - PV) Valor de la diferencia de regulacin del ciclo de exploracin actual Valor de la diferencia de regulacin del ciclo de exploracin anterior Magnitud de perturbacin Valor de la magnitud de regulacin del ciclo de exploracin actual Valor de la magnitud de regulacin del ciclo de exploracin anterior Salida actual (modalidad de servicio Detenido) o YMAN (modalidad de servicio manual) Componente D Componente I Componente P
dt ERR ERR ( new) ERR ( ol d)
FEED_FWD
PV ( new ) PV ( old )
Y YD YI YP
Magnitud de posicionado
La magnitud de posicionado se compone de diferentes magnitudes parciales que dependen de las modalidades de servicio:
Y = YP + YI + YD + FEED_FWD
Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir:
ymin Y ymax Vista general para el clculo de las componentes de regulacin
A continuacin encontrar una vista general de los diferentes clculos de las componentes de regulacin dependiendo de los elementos en_p, en_i y en_d: Componente P YP para las modalidades de servicio Manual, Detenido, Automtico Componente I YI para la modalidad de servicio Automtico Componente I YI para la modalidad de servicio Manual y Detenido Componente D YD para la modalidad de servicio Automtico Componente D YD para la modalidad de servicio Manual y Detenido
33002250
l l l l l
317
PID: Regulador PID
Componente P YP para todas las modalidades de servicio
El YP para las modalidades de servicio Manual, Detenido y Automtico se averigua de la siguiente forma: Para en_p = 1 rige:
YP = gain ERR
Para en_p = 0 rige:
YP = 0 Componente I YI para la modalidad de servicio Automtico
El YI para la modalidad de servicio Automtico se averigua de la siguiente forma: Para en_i = 1 rige:
dt ERR ( new ) + ERR ( old ) YI ( new ) = YI ( old ) + gain ---- ----------------------------------------------------ti 2 Para en_i = 0 rige: YI = 0 La componente I se forma de acuerdo a la regla del trapecio.
Componente I YI para la modalidad de servicio Manual y Detenido
El YI para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: Para en_i = 1 rige:
YI = Y ( YP FEED_FWD )
Para en_i = 0 rige: YI = 0
Componente D YD para la modalidad de servicio Automtico
El YD para la modalidad de servicio Automtico y Cascada se averigua de la siguiente forma: Para en_d = 1 y d_on_pv = 0 rige:
YD ( old ) td_lag + td gain ( ERR ( ne w ) ERR ( old ) ) YD ( new ) = ---------------------------------------------------------------------------------------------------------------------------------------dt + dt_lag
Para en_d = 1 y d_on_pv = 1 rige:
YD ( old ) td_lag + td gain ( PV ( ol d) PV ( ne w ) ) YD ( new ) = ------------------------------------------------------------------------------------------------------------------------------dt + dt_lag
Para en_d = 0 rige: YD = 0
318
33002250
PID: Regulador PID
Componente D YD para la modalidad de servicio Manual y Detenido
El YD para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: YD = 0
33002250
319
PID: Regulador PID
Error de tiempo de ejecucin
Aviso de error
Se efectuar un aviso de error cuando: exista un nmero de coma flotante no vlido en la entrada YMAN PV ymax es < ymin
320
l l
33002250
PID1: Regulador PID
36
Vista general
Introduccin Contenido:
Este captulo describe el bloque PID1. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Diagrama de estructura del bloque de funcin PID1 Parametrizacin del regulador PID1 Modalidades de servicio Frmulas detalladas Error de tiempo de ejecucin
Pgina
322 323 325 326 328 331 333
33002250
321
PID1: Regulador PID
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin realiza un regulador PID. Sobre la base de la magnitud de guiado SP y la magnitud de regulacin PV, se forma una diferencia de regulacin ERR. Esta diferencia de regulacin ERR provoca una variacin de la magnitud de posicionado Y. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin tiene las siguientes propiedades: Regulador PID real con ajuste independiente de GAIN, TI, TD Modalidades de servicio: Manual, Detenido, Automtico Conmutacin manual/automtico sin brusquedad Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Componentes P, I y D conectables de forma independiente Reseteado Antiwindup Medida Antiwindup slo si est activa la componente I Tiempo de retardo de la componente D definible Componente D conmutable a magnitud de regulacin PV o diferencia de regulacin ERR
Funcin de transferencia
Explicacin de las magnitudes
Magnitud
YD YI YP
Significado
Componente D (solamente en caso de EN_D = 1) Componente I (solamente en caso de EN_I = 1) Componente P (solamente en caso de EN_P = 1)
322
l l l l l l l l l
La funcin de transferencia es:
1 TD s G(s) = GAIN 1 + ------------- + ----------------------------------------TI s 1 + TD_LAG s
YD YI YP
33002250
PID1: Regulador PID
Representacin
Smbolo
Representacin del bloque:
PID1
BOOL BOOL REAL REAL REAL BOOL BOOL BOOL BOOL REAL TIME TIME TIME REAL REAL REAL
MAN HALT SP PV BIAS EN_P EN_I EN_D D_ON_X GAIN TI TD TD_LAG YMAX YMIN YMAN
Y ERR DATA QMAX QMIN
REAL REAL DATA BOOL BOOL
33002250
323
PID1: Regulador PID
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros
MAN HALT SP PV BIAS EN_P EN_I EN_D D_ON_X GAIN TI TD TD_LAG YMAX YMIN YMAN ERR Y QMAX QMIN
Tipo de datos
BOOL BOOL REAL REAL REAL BOOL BOOL BOOL BOOL REAL TIME TIME TIME REAL REAL REAL REAL REAL BOOL BOOL
Significado
"1": Modalidad de servicio Manual "1": Modalidad de servicio Detenido Entrada de valor terico Magnitud de entrada Entrada de la magnitud de perturbacin "1": Componente P conectada "1": Componente I conectada "1": Componente D conectada "1": Componente D en magnitud de regulacin; "0": Componente D en diferencia de regulacin Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Tiempo de adelantamiento de valor terico Tiempo de retardo, componente D Lmite superior de posicionado Lmite inferior de posicionado Valor de posicionado manual Salida diferencia de regulacin Magnitud de posicionado "1" = Salida Y alcanz el lmite de posicionado superior "1" = Salida Y alcanz el lmite de posicionado inferior
324
33002250
PID1: Regulador PID
Diagrama de estructura del bloque de funcin PID1
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del regulador PID1:
ERR
a) SP GAIN P
b) + ERR 1 0
-GAIN
c) PV 1 0
EN_P
a) 1 0 0 1 EN_I TD , TD_LAG 0 1 0 c) D_ON_X EN_D 1 D YI + TI I
Reseteado Antiwindup
YP + + YD + + YMAX YMIN
QMAX
b)
Control de la modalidad QMIN de servicio
BIAS
YMAN
33002250
325
PID1: Regulador PID
Parametrizacin del regulador PID1
Parametrizacin
La estructura del regulador PID1 se representa en el Diagrama de estructura, p. 325. La parametrizacin del bloque de funcin se efecta en primer lugar a travs de los parmetros PID puros, es decir, la amplificacin proporcional GAIN, la constante de tiempo de posicionado TI y tiempo de adelantamiento de valor terico TD. La componente D se retarda con el tiempo TD_LAG. La relacin entre TD/TD_LAG se denomina amplificacin diferenciada VD. La componente D se puede formar a travs de la diferencia de regulacin ERR (D_ON_X = 0) o a travs de la magnitud de regulacin PV (D_ON_X = 1). Si se determina la componente D a travs de la magnitud de regulacin PV, no existir ningn salto debido a la componente D, en caso de modificaciones en las magnitudes de guiado (modificaciones en la entrada SP). Dicha componente D se manifiesta solamente en el caso de perturbaciones y modificaciones en el proceso.
Inversin del sentido de regulacin
Se puede lograr un comportamiento inverso del regulador cambiando el signo antepuesto en GAIN. Un valor positivo en GAIN, provoca que el valor de salida aumente en el caso de una magnitud de perturbacin positiva. Un valor negativo en GAIN, hace que el valor de salida disminuya en el caso de una magnitud de perturbacin positiva. Los lmites YMAX e YMIN limitan la salida tanto hacia arriba como hacia abajo. De esta manera rige YMIN Y YMAX. Se visualiza a travs de ambas marcas QMAX y QMIN cuando se alcanzan los valores lmites o una limitacin de la seal de salida: QMAX = 1 si Y YMAX QMIN = 1 si Y YMIN
Limitacin de magnitudes de posicionado
326
l l
El lmite superior YMAX para la limitacin del valor de la magnitud deber seleccionarse mayor que el lmite inferior YMIN.
33002250
PID1: Regulador PID
Reseteado Antiwindup
Si tiene lugar una limitacin de las magnitudes de posicionado se debe contemplar mediante el reseteado Antiwindup que la componente integral "no pueda crecer por encima de todos los lmites". La medida Antiwindup se ejecutar solamente cuando la componente I del regulador no se encuentre desconectada. Los lmites para el Antiwindup son aqu los mismos que para la limitacin de las magnitudes de posicionado. No se considera la componente D para la medida Antiwindup, de tal forma, que los picos provocados por la componente D, no se recortarn mediante la medida Antiwindup. La medida de reseteado Antiwindup corrige la componente I de tal forma, que rija:
YMIN YP BIAS YI YMAX YP BIAS
Seleccin de los tipos de reguladores
Existen diferentes tipos de reguladores que se seleccionan a travs de los parmetros EN_P, EN_I y EN_D.
Tipo de regulador
Regulador P Regulador PI Regulador PD Regulador PID Regulador I
EN_P
1 1 1 1 0
EN_I
0 1 0 1 1
EN_D
0 0 1 1 0
La componente I tambin se puede desconectar por medio de TI = 0.
33002250
327
PID1: Regulador PID
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio que se seleccionan a travs de los parmetros MAN y HALT:
Modalidad de servicio
Automtico Manual Detenido
MAN
0 1 0
HALT
0 01 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico, se determina la magnitud de posicionado Y a travs del algoritmo discreto PID, dependiendo de la magnitud de regulacin PV y la magnitud de guiado SP. La magnitud de posicionado se limita a travs de ymax e ymin. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. En la modalidad de servicio Manual se transmite el valor de posicionado manual YMAN de forma fija a la salida de posicionado Y. No obstante, la salida de posicionado se limita a travs de YMAX e YMIN. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
Modalidad de servicio Manual
Modalidad de servicio Detenido
En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba, el bloque de funcin no modifica la salida de regulacin Y (el regulador permanece detenido), o sea Y = Y(old). Las magnitudes internas se guiarn de tal manera, que la suma de sus componentes se corresponda con la salida de posicionado, de tal forma que el regulador (en caso de componente I conectada) siga su marcha sin brusquedad a partir de su ubicacin actual. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado AntiWindup. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
328
33002250
PID1: Regulador PID
Conmutacin de Automtico a Manual
La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad, debido a que la salida Y puede adoptar cualquier valor entre ymax e ymin, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. Pero si la conmutacin de Automtico a Manual debe tener lugar sin brusquedad, existen dos posibilidades: Conmutacin por medio de la funcin MOVE Conmutacin por medio de un bloque de funcin LIMV limitador de crecimiento
Conmutacin con MOVE
33002250
l l
Ajuste a travs de la funcin MOVE el valor de YMAN al valor de Y:
PID1 Servicio Manual Valor manual MAN Y YMAN EN
MOVE
Nota: Este tipo de representacin se eligi solamente por razones de claridad para una mejor comprensin. Los vnculos representados con trazos no se pueden programar como links (objetos de vnculo) debido a que forman (en Concept) bucles no permitidos. Las uniones se deben realizar a travs de la programacin con variables.
La funcin MOVE se ejecutar solamente cuando el regulador PID se encuentre en la modalidad de servicio Automtico (MAN = 0). La conmutacin de Automtico a Manual tendr lugar sin brusquedad a continuacin, pues en este ciclo el valor de YMAN es igual al valor de Y. En la modalidad de servicio Manual podr modificar el valor de YMAN lentamente.
329
PID1: Regulador PID
Conmutacin con LIMV
Si no desea modificar el valor YMAN -porque es, p. ej., un valor fijo-, deber completar la solucin anterior con la ayuda de un limitador de crecimiento (bloque de funcin LIMV (vase LIMV: Limitador de crecimiento de primer orden, p. 209)):
LIMV Servicio Manual Valor manual Adaptacin HALT X RATE Y
PID1 MAN Y YMAN EN
MOVE
Nota: Este tipo de representacin se eligi solamente por razones de claridad para una mejor comprensin. Los vnculos representados con trazos no se pueden programar como links (objetos de vnculo) debido a que forman (en Concept) bucles no permitidos. Las uniones se deben realizar a travs de la programacin con variables.
La funcin MOVE se ejecutar solamente cuando el regulador PID se encuentre en la modalidad de servicio Automtico (MAN = 0). Si ahora tiene lugar una conmutacin de Automtico a Manual, se realizar sin brusquedad, pues en este ciclo el valor de YMAN (del PID1) es igual al valor de Y (del PID1). A partir del ciclo siguiente, el valor de YMAN (del PID1) se igualar al autntico valor manual (en LIMV) mediante la adaptacin que se haya determinado (RATE).
330
33002250
PID1: Regulador PID
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las siguientes frmulas:
Magnitud Significado
Diferencia de tiempo entre el ciclo actual y el anterior Diferencia de regulacin (SP - PV) Valor de la diferencia de regulacin del ciclo de exploracin actual Valor de la diferencia de regulacin del ciclo de exploracin anterior Magnitud de perturbacin Valor de la magnitud de regulacin del ciclo de exploracin actual Valor de la magnitud de regulacin del ciclo de exploracin anterior Salida actual (modalidad de servicio Detenido) o YMAN (modalidad de servicio manual) Componente D Componente I Componente P
dt ERR ERR ( new) ERR ( ol d)
BIAS
PV ( new ) PV ( old )
Y YD YI YP
Magnitud de posicionado
La magnitud de posicionado se compone de diferentes magnitudes parciales que dependen de las modalidades de servicio: Y = YP + YI + YD + BIAS Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir: YMIN Y YMAX A continuacin, encontrar una vista general de los diferentes clculos de las componentes de regulacin dependiendo de las entradas EN_P, EN_I y EN_D: Componente P YP para las modalidades de servicio Manual, Detenido, Automtico Componente I YI para la modalidad de servicio Automtico Componente I YI para la modalidad de servicio Manual y Detenido Componente D YD para la modalidad de servicio Automtico Componente D YD para la modalidad de servicio Manual y Detenido
33002250
l l l l l
Vista general para el clculo de las componentes de regulacin
331
PID1: Regulador PID
Componente P YP para todas las modalidades de servicio
El YP para las modalidades de servicio Manual, Detenido y Automtico se averigua de la siguiente forma: Para EN_P = 1 rige:
YP = GAIN ERR
Para EN_P = 0 rige:
YP = 0 Componente I YI para la modalidad de servicio Automtico
El YI para la modalidad de servicio Automtico se averigua de la siguiente forma: Para EN_I = 1 rige:
dt- ERR ( new ) + ERR ( old) YI ( ne w ) = YI ( old ) + GAIN ----- ----------------------------------------------------TI 2
Para EN_I = 0 rige:
YI = 0
La componente I se forma de acuerdo a la regla del trapecio.
Componente I YI para la modalidad de servicio Manual y Detenido
El YI para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: Para EN_I = 1 rige:
YI = Y ( YP BIAS )
Para EN_I = 0 rige: YI = 0
Componente D YD para la modalidad de servicio Automtico
El YD para la modalidad de servicio Automtico y Cascada se averigua de la siguiente forma: Para EN_D = 1 y D_ON_X = 0 rige: YD ( old ) TD_LAG + TD GAIN ( ERR ( new ) ERR ( ol d ) ) YD ( new ) = ------------------------------------------------------------------------------------------------------------------------------------------------------dt + TD_LAG Para EN_D = 1 y D_ON_X = 1 rige: YD ( old ) TD_LAG + TD GAIN ( PV ( ol d ) PV ( new ) ) YD ( new ) = ---------------------------------------------------------------------------------------------------------------------------------------------dt + TD_LAG Para EN_D = 0 rige: YD = 0
Componente D YD para la modalidad de servicio Manual y Detenido
El YD para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: YD = 0
332
33002250
PID1: Regulador PID
Error de tiempo de ejecucin
Aviso de error
En YMAX < YMIN se efecta un aviso de error.
33002250
333
PID1: Regulador PID
334
33002250
PID_P: Regulador PID con estructura paralela
37
Vista general
Introduccin Contenido:
Este captulo describe el bloque PID_P. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Parametrizacin del regulador PID_P Modalidades de servicio Frmulas detalladas Error de tiempo de ejecucin
Pgina
336 338 340 342 343 345
33002250
335
PID_P: Regulador PID con estructura paralela
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin realiza un regulador PID en una estructura paralela pura. La diferencia de regulacin ERR se forma entre la magnitud de guiado SP y la magnitud de regulacin PV. Esta diferencia de regulacin ERR provoca una modificacin de la magnitud de posicionado Y. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin tiene las siguientes propiedades: Regulador PID en una estructura paralela pura Factores de amplificacin independientes para las componentes P, I y D Cada componente P, I o D se puede desconectar individualmente. Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Medida Antiwindup slo si est activa la componente I Reseteado Antiwindup Modalidades de servicio: Manual, Detenido, Automtico Conmutacin manual/automtico sin brusquedad Componente D conmutable a magnitud de entrada PV o diferencia de regulacin ERR Componente D con retardo de tiempo variable
336
l l l l l l l l l l
33002250
PID_P: Regulador PID con estructura paralela
Funcin de transferencia
La funcin de transferencia es: ki kd s G(s) = kp + ---- + ------------------------s 1 s + ---------------td_lag
YD YI YP
Explicacin de las magnitudes:
Magnitud
YD YI YP
Significado
Componente D Componente I Componente P
33002250
337
PID_P: Regulador PID con estructura paralela
Representacin
Smbolo
Representacin del bloque:
PID_P
REAL REAL Mode_PID_P Para_PID_P REAL REAL
SP PV MODE PARA YMAN FEED_FWD
Y ERR
REAL REAL
STATUS
Stat_MAXMIN
Descripcin de parmetros PID_P
Descripcin de los parmetros del bloque
Parmetros
SP PV MODE PARA YMAN FEED_FWD Y ERR STATUS
Tipo de datos
REAL REAL Mode_PID_P Para_PID_P REAL REAL REAL REAL Stat_MAXMIN
Significado
Magnitud de guiado Magnitud de regulacin Modalidades de servicio Parmetros Valor de posicionado manual Entrada de la magnitud de perturbacin Magnitud de posicionado Diferencia de regulacin Estado de la salida Y
Descripcin de parmetros Mode_PIP_P
Descripcin de la estructura de datos
Elemento
man halt d_on_pv
Tipo de datos
BOOL BOOL BOOL
Significado
"1": Modalidad manual "1": Modalidad de servicio Detenido "1": Componente D referida a la magnitud de regulacin; "0": Componente D referida a la diferencia de regulacin "1": Inversin de salida
reverse
BOOL
338
33002250
PID_P: Regulador PID con estructura paralela
Descripcin de parmetros Para_PID_P
Descripcin de la estructura de datos
Elemento
kp ki kd td_lag ymax ymin
Tipo de datos
REAL REAL REAL TIME REAL REAL
Significado
Amplificacin proporcional (Factor de amplificacin = Componente P) Amplificacin de la integracin (Factor de amplificacin de la componente I) [1/s] Amplificacin de la diferenciacin (Factor de amplificacin de la componente D) [s] Tiempo de retardo (Unidad = s), componente D Lmite superior de posicionado Lmite inferior de posicionado
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento
qmax qmin
Tipo de datos
BOOL BOOL
Significado
"1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
33002250
339
PID_P: Regulador PID con estructura paralela
Parametrizacin del regulador PID_P
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del bloque PIP_P:
ERR kp P
SP Reseteado Antiwindup
ki + ERR
I YP YI + + + YD + + ymax ymin qmax Servicio la modalidad qmin de control Y
kd, td_lag 0 1 PV d_on_pv YMAN
FEED_FWD
Parametrizacin
La estructura del regulador PID_P se representa en el Diagrama de estructura, p. 340. La parametrizacin del regulador PID_P tiene lugar primeramente a travs de los parmetros PID puros, o sea, la amplificacin proporcional kp, la amplificacin de la integracin ki y la amplificacin de la diferenciacin kd. Las componentes P, I y D se pueden desconectar individualmente poniendo a cero la correspondiente entrada (kp, ki o kd). La componente D se retarda con la constante de tiempo td_lag. Se puede formar la componente D, ya sea basndose en la diferencia de regulacin ERR (d_on_pv =0) o en la magnitud de regulacin PV (d_on_pv = 1). Si se determina la componente D sobre la base de la magnitud de regulacin PV, no existir ningn salto debido a la componente D, en caso de modificaciones en las magnitudes de guiado (modificaciones en la entrada SP). Dicha componente D se manifiesta por lo general solamente en el caso de perturbaciones o modificaciones en el proceso.
340
33002250
PID_P: Regulador PID con estructura paralela
Inversin del sentido de regulacin
Se puede lograr un comportamiento inverso del regulador poniendo a 1 la entrada reverse. Con reverse = 0 se logra que aumente el valor de salida en caso de disponer de una magnitud de perturbacin positiva. Con reverse = 1 se logra que descienda el valor de salida en caso de disponer de una magnitud de perturbacin positiva. Los valores ymax e ymin limitan la salida tanto hacia arriba como hacia abajo. De esta forma rigen ymin Y ymax. Se visualiza a travs de las salidas qmax y qmin, cuando se alcanzan los valores lmites, o bien cuando se alcanza una limitacin de la seal de salida: qmax = 1 si Y ymax qmin = 1 si Y ymin
Limitacin de magnitudes de posicionado
El lmite superior ymax para la limitacin de la magnitud de posicionado se debe elegir superior al lmite inferior ymin, de lo contrario el bloque comunicar un error y no funcionar.
Reseteado Antiwindup
Seleccin de los tipos de reguladores
33002250
l l
Si tiene lugar una limitacin de las magnitudes de posicionado se debe contemplar mediante el reseteado Antiwindup que la componente integral "no pueda crecer por encima de todos los lmites". La medida Antiwindup se ejecutar solamente cuando la componente I del regulador no se encuentre desconectada. Los lmites para el Antiwindup son aqu los mismos que para la limitacin de las magnitudes de posicionado. No se considera la componente D para la medida Antiwindup, de tal forma, que los picos provocados por la componente D, no se recortarn mediante la medida Antiwindup. La medida de reseteado Antiwindup corrige la componente I de tal forma, que rija: ymin YP FEED_FWD YI ymax YP FEED_FWD Existen diferentes tipos de reguladores que se seleccionan a travs de los parmetros kp, ki y kd.
Tipo de regulador
Regulador P Regulador PI Regulador PD Regulador PID Regulador I
kp
>0 >0 >0 >0 =0
ki
=0 >0 =0 >0 >0
kd
=0 =0 >0 >0 =0
341
PID_P: Regulador PID con estructura paralela
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los parmetros man y halt:
Modalidad de servicio
Automtico Manual Detenido
man
0 1 0
halt
0 01 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico, se determina la magnitud de posicionado Y a travs del algoritmo discreto PID, dependiendo de la magnitud de regulacin PV y la magnitud de guiado SP. La magnitud de posicionado se limita a travs de ymax e ymin. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad, debido a que la salida Y puede adoptar cualquier valor entre ymax e ymin, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. Pero si la conmutacin debe tener lugar sin brusquedad, existen dos posibilidades, que se aclaran a modo de ejemplo para un regulador PID (vase Conmutacin de Automtico a Manual, p. 315 ) .
Modalidad de servicio Manual
En la modalidad de servicio Manual se transmite el valor de posicionado manual YMAN de forma fija a la magnitud de posicionado Y. No obstante, la magnitud de posicionado se limita a travs de ymax e ymin. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
Modalidad de servicio Detenido
En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba; el bloque de funcin no modifica la magnitud de posicionado Y (el regulador permanece detenido), o sea Y = Y(old). Las magnitudes internas se guiarn de tal forma, que el regulador contine su marcha (en caso de componente I conectada) sin brusquedad a partir de su posicin actual. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado AntiWindup. La modalidad de servicio Detenido es apropiada, entre otras cosas, para ajustar la salida de regulacin Y a travs de un mando externo, siendo guiadas correctamente las componentes internas en el regulador. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
342
33002250
PID_P: Regulador PID con estructura paralela
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las frmulas:
Magnitud Significado
Diferencia de tiempo entre el ciclo actual y el anterior Diferencia de regulacin (SP - PV) Valor de la diferencia de regulacin del ciclo de exploracin actual Valor de la diferencia de regulacin del ciclo de exploracin anterior Magnitud de perturbacin Valor de la magnitud de regulacin del ciclo de exploracin actual Valor de la magnitud de regulacin del ciclo de exploracin anterior Salida actual (modalidad de servicio Detenido) o YMAN (modalidad de servicio manual) Componente D Componente I Componente P
dt ERR ERR ( new) ERR ( ol d)
FEED_FWD
PV ( new ) PV ( old )
Y YD YI YP
Magnitud de posicionado
La magnitud de posicionado se componen de diversas partes de magnitudes: Y = YP + YI + YD + FEED_FWD Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir:
ymin Y ymax
Diferencia de regulacin
La diferencia de regulacin se determina de la siguiente forma: ERR = SP - PV, si reverse = 0 ERR = PV - SP, si reverse = 1
33002250
343
PID_P: Regulador PID con estructura paralela
Componente P YP para todas las modalidades de servicio Componente I YI para la modalidad de servicio Automtico
Componente I YI para la modalidad de servicio Manual y Detenido
344
l l l l l
Vista general para el clculo de las componentes de regulacin
A continuacin encontrar una vista general de los diferentes clculos de las componentes de regulacin dependiendo de los factores de amplificacin kp, ki y kd: Componente P YP para las modalidades de servicio Manual, Detenido, Automtico Componente I YI para la modalidad de servicio Automtico Componente I YI para la modalidad de servicio Manual y Detenido Componente D YD para la modalidad de servicio Automtico Componente D YD para la modalidad de servicio Manual y Detenido El YP para las modalidades de servicio Manual, Detenido y Automtico se averigua de la siguiente forma:
YP = kp ERR
El YI para la modalidad de servicio Automtico se averigua de la siguiente forma: Para ki > 0 rige:
ERR ( ne w ) + ERR ( old ) YI ( ne w ) = YI ( old ) + ki dt ----------------------------------------------------2
Para ki = 0 rige: YI = 0 La componente I se forma de acuerdo a la regla del trapecio. El YI para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: Para ki > 0 rige:
YI = Y ( YP FEED_FWD )
Para ki = 0 rige: YI = 0
33002250
PID_P: Regulador PID con estructura paralela
Componente D YD para la modalidad de servicio Automtico
El YD para la modalidad de servicio Automtico y Cascada se averigua de la siguiente forma: Para kd > 0 y d_on_pv = 0 rige:
td_lag YD ( new ) = --------------------------- ( YD ( old ) + kd ( ERR ( new ) ERR ( old ) ) ) dt + td_lag
Para kd > 0 y d_on_pv = 1 rige:
td_lag YD ( new ) = --------------------------- ( YD ( old ) + kd ( PV ( old ) PV ( new ) ) ) dt + td_lag
Para kd = 0 rige: YD = 0
Componente D YD para la modalidad de servicio Manual y Detenido
El YD para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma:
YD = 0
Error de tiempo de ejecucin
Aviso de error
Se efectuar un aviso de error cuando: exista un nmero de coma flotante no vlido en la entrada YMAN ymax es < ymin.
33002250
l l
345
PID_P: Regulador PID con estructura paralela
346
33002250
PID_PF: Regulador PID con estructura paralela
38
Vista general
Introduccin Contenido:
Este captulo describe el bloque PID_PF. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Parametrizacin del regulador PID_PF Modalidades de servicio Frmulas detalladas Error de tiempo de ejecucin
Pgina
348 349 351 353 355 345
33002250
347
PID_PF: Regulador PID con estructura paralela
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin realiza un regulador PID en una estructura paralela pura. La diferencia de regulacin ERR se forma entre la magnitud de guiado SP y la magnitud de regulacin PV. Esta diferencia de regulacin ERR provoca una modificacin de la magnitud de posicionado Y. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin tiene las siguientes propiedades: Regulador PID en una estructura paralela pura Factores de amplificacin independientes para las componentes P, I y D Cada componente P, I o D se puede desconectar individualmente. Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Medida Antiwindup slo si est activa la componente I Reseteado Antiwindup Modalidades de servicio: Manual, Detenido, Automtico Conmutacin manual/automtico sin brusquedad Componente D conmutable a magnitud de entrada PV o diferencia de regulacin ERR Componente D con retardo de tiempo variable
Funcin de transferencia
348
l l l l l l l l l l
La funcin de transferencia es: ki kd s G(s) = kp + ---- + ------------------------s 1 s + ---------------td_lag
YD YI YP
Explicacin de las magnitudes:
Magnitud
YD YI YP
Significado
Componente D Componente I Componente P
33002250
PID_PF: Regulador PID con estructura paralela
Representacin
Smbolo
Representacin del bloque:
PID_PF
REAL REAL Mode_PID_P Para_PID_P REAL REAL
SP PV MODE PARA YMAN FEED_FWD
Y ERR
REAL REAL
STATUS
Stat_MAXMIN
Descripcin de parmetros PID_PF
Descripcin de los parmetros del bloque
Parmetros
SP PV MODE PARA YMAN FEED_FWD Y ERR STATUS
Tipo de datos
REAL REAL Mode_PID_P Para_PID_P REAL REAL REAL REAL Stat_MAXMIN
Significado
Magnitud de guiado Magnitud de regulacin Modalidades de servicio Parmetros Valor de posicionado manual Entrada de la magnitud de perturbacin Magnitud de posicionado Diferencia de regulacin Estado de la salida Y
Descripcin de parmetros Mode_PIP_P
Descripcin de la estructura de datos
Elemento
man halt d_on_pv
Tipo de datos
BOOL BOOL BOOL
Significado
"1": Modalidad manual "1": Modalidad de servicio Detenido "1": Componente D referida a la magnitud de regulacin; "0": Componente D referida a la diferencia de regulacin "1": Inversin de salida
reverse
BOOL
33002250
349
PID_PF: Regulador PID con estructura paralela
Descripcin de parmetros Para_PID_P
Descripcin de la estructura de datos
Elemento
kp ki kd td_lag ymax ymin
Tipo de datos
REAL REAL REAL TIME REAL REAL
Significado
Amplificacin proporcional (Factor de amplificacin = Componente P) Amplificacin de la integracin (Factor de amplificacin de la componente I) [1/s] Amplificacin de la diferenciacin (Factor de amplificacin de la componente D) [s] Tiempo de retardo, componente D Lmite superior de posicionado Lmite inferior de posicionado
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento
qmax qmin
Tipo de datos
BOOL BOOL
Significado
"1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
350
33002250
PID_PF: Regulador PID con estructura paralela
Parametrizacin del regulador PID_PF
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del bloque PIP_PF:
ERR kp P
SP Reseteado Antiwindup
ki + ERR
I YP YI + + + YD + + ymax ymin qmax Servicio la modalidad qmin de control Y
kd, td_lag 0 1 PV d_on_pv YMAN
FEED_FWD
Parametrizacin
La estructura del regulador PID_PF se representa en el Diagrama de estructura, p. 351. La parametrizacin del regulador PID_PF tiene lugar primeramente a travs de los parmetros PID puros, o sea, la amplificacin proporcional kp, la amplificacin de la integracin ki y la amplificacin de la diferenciacin kd. Las componentes P, I y D se pueden desconectar individualmente poniendo a cero la correspondiente entrada (kp, ki o kd). La componente D se retarda con la constante de tiempo td_lag. Se puede formar la componente D, ya sea basndose en la diferencia de regulacin ERR (d_on_pv =0) o en la magnitud de regulacin PV (d_on_pv = 1). Si se determina la componente D sobre la base de la magnitud de regulacin PV, no existir ningn salto debido a la componente D, en caso de modificaciones en las magnitudes de guiado (modificaciones en la entrada SP). Dicha componente D se manifiesta por lo general solamente en el caso de perturbaciones o modificaciones en el proceso.
33002250
351
PID_PF: Regulador PID con estructura paralela
Inversin del sentido de regulacin
Se puede lograr un comportamiento inverso del regulador poniendo a 1 la entrada reverse. Con reverse = 0 se logra que aumente el valor de salida en caso de disponer de una magnitud de perturbacin positiva. Con reverse = 1 se logra que descienda el valor de salida en caso de disponer de una magnitud de perturbacin positiva. Los valores ymax e ymin limitan la salida tanto hacia arriba como hacia abajo. De esta forma rigen ymin Y ymax. Se visualiza a travs de las salidas qmax y qmin, cuando se alcanzan los valores lmites, o bien cuando se alcanza una limitacin de la seal de salida: qmax = 1 si Y ymax qmin = 1 si Y ymin El lmite superior ymax para la limitacin de la magnitud de posicionado se debe elegir superior al lmite inferior ymin, de lo contrario el bloque comunicar un error y no funcionar.
Limitacin de magnitudes de posicionado
Reseteado Antiwindup
Seleccin de los tipos de reguladores
352
l l
Si tiene lugar una limitacin de las magnitudes de posicionado se debe contemplar mediante el reseteado Antiwindup que la componente integral "no pueda crecer por encima de todos los lmites". La medida Antiwindup se ejecutar solamente cuando la componente I del regulador no se encuentre desconectada. Los lmites para el Antiwindup son aqu los mismos que para la limitacin de las magnitudes de posicionado. No se considera la componente D para la medida Antiwindup, de tal forma, que los picos provocados por la componente D, no se recortarn mediante la medida Antiwindup. La medida de reseteado Antiwindup corrige la componente I de tal forma, que rija: ymin YP FEED_FWD YI ymax YP FEED_FWD Existen diferentes tipos de reguladores que se seleccionan a travs de los parmetros kp, ki y kd.
Tipo de regulador
Regulador P Regulador PI Regulador PD Regulador PID Regulador I
kp
>0 >0 >0 >0 =0
ki
=0 >0 =0 >0 >0
kd
=0 =0 >0 >0 =0
33002250
PID_PF: Regulador PID con estructura paralela
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio, que se seleccionan a travs de los parmetros man y halt:
Modalidad de servicio
Automtico Manual Detenido
man
0 1 0
halt
0 01 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico, se determina la magnitud de posicionado Y a travs del algoritmo discreto PID, dependiendo de la magnitud de regulacin PV y la magnitud de guiado SP. La magnitud de posicionado se limita a travs de ymax e ymin. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad, debido a que la salida Y puede adoptar cualquier valor entre ymax e ymin, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. Pero si la conmutacin debe tener lugar sin brusquedad, existen dos posibilidades, que se aclaran a modo de ejemplo para un regulador PID (vase Conmutacin de Automtico a Manual, p. 315) .
Modalidad de servicio Manual
En la modalidad de servicio Manual se transmite el valor de posicionado manual YMAN de forma fija a la magnitud de posicionado Y. No obstante, la magnitud de posicionado se limita a travs de ymax e ymin. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
33002250
353
PID_PF: Regulador PID con estructura paralela
Modalidad de servicio Detenido
En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba; el bloque de funcin no modifica la magnitud de posicionado Y (el regulador permanece detenido), o sea Y = Y(old). Las magnitudes internas se guiarn de tal forma, que el regulador contine su marcha (en caso de componente I conectada) sin brusquedad a partir de su posicin actual. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado AntiWindup. La modalidad de servicio Detenido es apropiada, entre otras cosas, para ajustar la salida de regulacin Y a travs de un mando externo, siendo guiadas correctamente las componentes internas en el regulador. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
354
33002250
PID_PF: Regulador PID con estructura paralela
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las frmulas:
Magnitud Significado
Diferencia de tiempo entre el ciclo actual y el anterior Diferencia de regulacin (SP - PV) Valor de la diferencia de regulacin del ciclo de exploracin actual Valor de la diferencia de regulacin del ciclo de exploracin anterior Magnitud de perturbacin Valor de la magnitud de regulacin del ciclo de exploracin actual Valor de la magnitud de regulacin del ciclo de exploracin anterior Salida actual (modalidad de servicio Detenido) o YMAN (modalidad de servicio manual) Componente D Componente I Componente P
dt ERR ERR ( new) ERR ( ol d)
FEED_FWD
PV ( new ) PV ( old )
Y YD YI YP
Magnitud de posicionado
La magnitud de posicionado se componen de diversas partes de magnitudes: Y = YP + YI + YD + FEED_FWD Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir:
ymin Y ymax
Diferencia de regulacin
La diferencia de regulacin se determina de la siguiente forma: ERR = SP - PV, si reverse = 0 ERR = PV - SP, si reverse = 1
33002250
355
PID_PF: Regulador PID con estructura paralela
Componente P YP para todas las modalidades de servicio Componente I YI para la modalidad de servicio Automtico
Componente I YI para la modalidad de servicio Manual y Detenido
356
l l l l l
Vista general para el clculo de las componentes de regulacin
A continuacin encontrar una vista general de los diferentes clculos de las componentes de regulacin dependiendo de los factores de amplificacin kp, ki y kd: Componente P YP para las modalidades de servicio Manual, Detenido, Automtico Componente I YI para la modalidad de servicio Automtico Componente I YI para la modalidad de servicio Manual y Detenido Componente D YD para la modalidad de servicio Automtico Componente D YD para la modalidad de servicio Manual y Detenido El YP para las modalidades de servicio Manual, Detenido y Automtico se averigua de la siguiente forma:
YP = kp ERR
El YI para la modalidad de servicio Automtico se averigua de la siguiente forma: Para ki > 0 rige:
ERR ( ne w ) + ERR ( old ) YI ( ne w ) = YI ( old ) + ki dt ----------------------------------------------------2
Para ki = 0 rige: YI = 0 La componente I se forma de acuerdo a la regla del trapecio. El YI para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: Para ki > 0 rige:
YI = Y ( YP FEED_FWD )
Para ki = 0 rige: YI = 0
33002250
PID_PF: Regulador PID con estructura paralela
Componente D YD para la modalidad de servicio Automtico
El YD para la modalidad de servicio Automtico y Cascada se averigua de la siguiente forma: Para kd > 0 y d_on_pv = 0 rige:
td_lag YD ( new ) = --------------------------- ( YD ( old ) + kd ( ERR ( new ) ERR ( old ) ) ) dt + td_lag
Para kd > 0 y d_on_pv = 1 rige:
td_lag YD ( new ) = --------------------------- ( YD ( old ) + kd ( PV ( old ) PV ( new ) ) ) dt + td_lag
Para kd = 0 rige: YD = 0
Componente D YD para la modalidad de servicio Manual y Detenido
El YD para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma:
YD = 0
Error de tiempo de ejecucin
Aviso de error
Se efectuar un aviso de error cuando: exista un nmero de coma flotante no vlido en la entrada YMAN ymax es < ymin.
33002250
l l
357
PID_PF: Regulador PID con estructura paralela
358
33002250
PIDFF: Regulador PID completo
39
Vista general
Introduccin Contenido:
Este captulo describe el bloque PIDFF. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas Diagrama de estructura del regulador PIDFF. Parametrizacin Modalidades de servicio Ecuaciones detalladas Ecuaciones detalladas: Algoritmo incremental regulador PID Ecuaciones detalladas: Algoritmo incremental en modalidad integral Ejemplos del bloque PIDFF Error de tiempo de ejecucin
Pgina
360 361 364 366 367 372 373 376 378 379 385
33002250
359
PIDFF: Regulador PID completo
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin PIDFF se basa en un algoritmo PID con estructura paralela o mixta (serie / paralelo). Se pueden proyectar EN y ENO como parmetros adicionales.
Funcionalidades
Dispone de diferentes funcionalidades: Clculo de la componente proporcional, integral y diferencial de forma incremental 2 medidas Antiwindup Valor real, valor terico y valor de salida en unidades fsicas Accin directa o inversa Componente diferencial en valor real o desviacin Parametrizacin de la amplificacin de transferencia de la componente diferencial Ponderacin del valor terico en la componente proporcional (amortiguacin del desbordamiento) Posibilidad de conmutar una componente integral externa al bloque (entrada RCPY) Componente Feed Forward para la compensacin de perturbaciones (entrada FF) Zona de insensibilidad en variacin Salida de valor incremental y de valor absoluto Limitacin superior e inferior de la seal de salida (segn modalidad de servicio) Limitacin de gradiente de la seal de salida Offset de salida Seleccin de la modalidad de servicio Manual / Automtico Modalidad de servicio Tracking Limitacin superior e inferior del valor terico
360
l l l
Funcionalidades complementarias
l l l l l l l l l l l l l l l l l
Otros bloques de funcin que se pueden utilizar en conjunto con el bloque PIDFF complementan estas funcionalidades: Ajuste automtico del regulador a travs del bloque de funcin AUTOTUNE Seleccin de un valor terico interno o externo por medio del bloque SP_SEL Control del servicio manual de los bucles de regulacin explorados (vase Exploracin, p. 36) por medio del bloque de funcin MS
33002250
PIDFF: Regulador PID completo
Representacin
Smbolo
Representacin del mdulo:
PIDFF
REAL REAL REAL REAL BOOL Para_PIDFF REAL BOOL
OUT PV SP OUTD FF RCPY MAN_AUTO MA_O PARA INFO TR_I STATUS TR_S
REAL REAL
BOOL Info_PIDFF WORD
Descripcin de parmetros PIDFF
Descripcin de los parmetros del bloque
Parmetro
PV SP FF RCPY MAN_AUTO
Tipo de datos Significado
REAL REAL REAL REAL BOOL Valor real (Process Value) Valor terico (Set Point) Entrada de la magnitud de perturbacin Copia de la magnitud de posicionado actual Regulador de modalidad de servicio: "1": Servicio Automtico "0": Servicio Manual Parmetro Entrada de inicializacin Comando de inicializacin Salida del valor absoluto Salida del valor incremental: Diferencia entre la salida del ciclo actual y del anterior Modalidad de servicio actual del bloque de funcin: "1": Modalidad de servicio Automtico "0": otra modalidad de servicio (es decir, servicio Manual o Tracking) Informacin Palabra de estado
PARA TR_I TR_S OUT OUTD MA_O
Para_PIDFF REAL BOOL REAL REAL BOOL
INFO STATUS
Info_PIDFF WORD
33002250
361
PIDFF: Regulador PID completo
Descripcin de parmetros Para_PIDFF
Descripcin de la estructura de datos
Elemento
id pv_inf pv_sup out_inf out_sup rev_dir mix_par aw_type en_rcpy kp ti td kd pv_dev
Tipo de datos
UINT REAL REAL REAL REAL BOOL BOOL BOOL BOOL REAL TIME TIME REAL BOOL
Significado
Reservado para el ajuste automtico del regulador Lmite inferior del rango del valor real Lmite superior del rango del valor real Lmite inferior del rango del valor de salida Lmite superior del rango del valor de salida "0": Accin directa del regulador PID "1": Accin inversa del regulador PID "1": Regulador PID con estructura paralela "0": Regulador PID con estructura mixta "1": Detencin Antiwindup se est filtrando "1": la entrada RCPY se utilizar Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Tiempo de adelantamiento de valor terico Amplificacin diferenciada Tipo de la componente diferencial: "1": Componente diferencial referida a la diferencia de regulacin "0": Componente diferencial referida a la magnitud de regulacin (valor real) "1": Traspaso a la modalidad de servicio Automtico con brusquedad "0": Traspaso a la modalidad de servicio Automtico sin brusquedad Zona de insensibilidad en variacin Amortiguacin de la componente proporcional dentro de la zona de insensibilidad dband Amortiguacin del desbordamiento Compensacin manual de la variacin esttica Valor lmite inferior de la salida Valor lmite superior de la salida Valor lmite para la modificacin de la salida, en unidades por segundo ( 0) Valor lmite inferior del rango FF Valor lmite superior del rango FF Valor lmite inferior del rango out_ff
33002250
bump
BOOL
dband gain_kp ovs_att outbias out_min out_max outrate ff_inf ff_sup otff_inf
REAL REAL REAL REAL REAL REAL REAL REAL REAL REAL
362
PIDFF: Regulador PID completo
Elemento
otff_sup
Tipo de datos
REAL
Significado
Valor lmite superior del rango out_ff
Descripcin de parmetros Info_PIDFF
Descripcin de la estructura de datos
Elemento
dev out_ff
Tipo de datos
REAL REAL
Significado
Valor de variacin (PV - SP) Valor de la componente Feed Forward
33002250
363
PIDFF: Regulador PID completo
Frmulas
Funcin de transferencia
Dependiendo de si se utiliza la estructura mixta o la paralela, la funcin de transferencia es la siguiente:
Estructura
Mixtas
Frmulas
1 td p OUT = kp 1 + ------------ + ------------------------------ IN ti p td 1 + ----- p kd
Paralelas
td p 1 OUT = kp + ------------ + ------------------------------ IN ti p td 1 + ----- p kd
con = Factor de amplificacin
out_sup out_inf OUT = -------------------------------------------pv_sup pv_inf
Frmulas de clculos
Las frmulas utilizadas realmente varan dependiendo de que el bloque de funcin utilice el algoritmo incremental o el absoluto. De forma muy simplificada podr utilizar el bloque de funcin una de las siguientes frmulas:
Algoritmo
Absoluto
ti
0
Frmulas
OUT = TermP + TermD + TermFF + outbias OUTD = OUT ( new ) OUT ( old )
Incremental
>0
OUTD = TermP + TermI + TermD + TermFF OUT = OUT ( old ) + OUTD ( new )
364
33002250
PIDFF: Regulador PID completo
Explicacin de las magnitudes de las frmulas
En las siguientes tablas encontrar el significado de las magnitudes de las frmulas:
Magnitud
(new) (old) OUT OUTD TermD TermFF TermI TermP
Significado
Valor, que se calcular en la ejecucin actual del bloque de funcin Valor, que se calcul en la ejecucin anterior del bloque de funcin Salida del valor absoluto Salida del valor incremental Valor de la componente diferencial Valor de la componente Feed Forward (compensacin de perturbacin) Valor de la componente integral Valor de la componente proporcional
33002250
365
PIDFF: Regulador PID completo
Diagrama de estructura del regulador PIDFF.
Diagrama de estructura
Diagrama de estructura del regulador PIDFF.
ff_sup FF otff_sup a) Feed Forward action ff_inf otff_inf
Overshoot attenuation ovs_att
DEV_WGH +
Proportional action kp
pv_sup SP pv_inf
dev +
Integral action ti, K dband gain_kp pv_dev Derivative action td, kd, K
+ b) +
PV
a)
out_ff Reverse Direct rev_dir outbias + + + + outrate Variation limiter
out_max Limiter out_min
b)
Manu Auto MAN_AUTO out_sup Limiter TR_I TR_S Tracking out_inf OUT
366
33002250
PIDFF: Regulador PID completo
Parametrizacin
Estructura mixta / paralela (mix_par)
La seleccin de la estructura se efecta a travs del parmetro mix_par :
Si ...
mix_par = 0
Entonces ...
se trata de una estructura mixta, es decir, que la componente proporcional se aplica a continuacin de la componente integral y diferencial. El factor de amplificacin K aplicado a las componentes (vase Diagrama de estructura, p. 366) se corresponde con kp. la estructura es paralela, es decir, la amplificacin proporcional se aplica en paralelo a la amplificacin integral y diferencial. En este caso el factor de amplificacin kp no se refiere a las componentes integral y diferencial. La amplificacin K corresponde en este caso a la relacin del rango de salida al rango de medicin.
mix_par = 1
Algoritmos absolutos (ti = 0)
Los algoritmos absolutos se utilizan si no se aplica ninguna componente integral (ti = 0). En este caso, se calcula en primer lugar la salida OUT y a continuacin se resta la modificacin de la salida.
33002250
367
PIDFF: Regulador PID completo
Algoritmos incrementales (ti > 0)
Los algoritmos incrementales se utilizan cuando existe una componente integral (es decir, si ti > 0). La particularidad de este algoritmo consiste en calcular en primer lugar la modificacin de la salida OUTD y, a continuacin, determinar la salida del valor absoluto por medio de la siguiente frmula:
OUT ( new ) = OUT ( old ) + OUTD
Esta forma de algoritmo permite utilizar un bloque SERVO supeditado al regulador y lograr as una regulacin flotante. La forma incremental ofrece adems las siguientes posibilidades:
Posibilidad
Componente integral externa del bloque (con en_rcpy = 1)
Explicacin
Si la componente real difiere del valor calculado por el regulador (cuando el circuito de regulacin est abierto), se debera utilizar el valor real en el clculo. Si este valor est disponible se deber conectar a la entrada RCPY y ajustar a 1 el parmetro en_rcpy. En los clculos que realiza el bloque, la ecuacin OUT(new) = OUT (old) + OUTD se convierte en OUT(new) = RCPY + OUTD Este mecanismo es especialmente til en la regulacin de cascadas o similares. Nota: En este caso no se limita la salida OUT. La forma incremental del regulador PID ofrece de forma predeterminada un mecanismo Antiwindup inherente al algoritmo. En aw_type = 0 se toma este tipo como base. En este caso puede suceder que la salida est saturada y abandone repentinamente su valor lmite, incluso si no cambia el signo de desviacin (p. ej., bajo la influencia de una pequea perturbacin durante la medicin). Es posible aplicar una segunda medida Antiwindup (aw_type = 1), que impide la salida supere su valor lmite mientras la desviacin no cambie el signo.
Medida Antiwindup ampliada
368
33002250
PIDFF: Regulador PID completo
Ponderacin del valor terico en la componente proporcional (amortiguacin del desbordamiento)
Si existe una componente integral (ti > 0), el parmetro ovs_att permite la ponderacin de la componente proporcional: el clculo de la componente proporcional se basa en la desviacin ponderada ( PV ( 1 ovs_att ) SP ). Esto permite operar sobre los desbordamientos que puedan producirse, debido a variaciones de valor terico. El objetivo es obtener una accin proporcional fuerte en regulacin y, por lo tanto, una respuesta dinmica a las perturbaciones sin que se generen desbordamientos durante la regulacin. El parmetro ovs_att puede oscilar de forma continua entre:
Valor
0 1
Significado
accin proporcional aplicada sobre la desviacin (diferencia de regulacin) (caso clsico) accin proporcional aplicada sobre el valor de medicin (magnitud de regulacin) (caso de los procesos sensibles o integradores).
33002250
369
PIDFF: Regulador PID completo
Zona de insensibilidad en variacin (dband)
Al alcanzar el punto de trabajo la zona de insensibilidad permite limitar pequeos golpes de restablecimiento frente al valor del actuador: mientras la desviacin permanezca inferior a dband el bloque de funcin la considerar nula para sus clculos. En el interior de la zona de insensibilidad se puede utilizar el parmetro gain_kp ampliado para la modificacin de la desviacin. Esto es mejor que borrarla. La desviacin modificada (multiplicada por gain_kp) se utiliza para el clculo de la componente proporcional e integral. Representacin de la modificacin de la desviacin
Desviacin modificada Desviacin modificada
Pendiente = gain_kp
Pendiente = gain_kp
dband
DEV
dband
DEV
0 <= gain_kp < 1
gain_kp > 1
Amplificacin de transferencia en la componente diferencial
El bloque de funcin PIDFF contiene un filtro de primer orden para la componente diferencial. La amplificacin del filtro kp es parametrizable, lo cual permite tratar los procesos en los que la componente diferencial se debe filtrar fuertemente, as como aquellos, en los cuales se puede prescindir del filtrado de la componente diferencial, debido a que la seal es suficientemente "pura".
370
33002250
PIDFF: Regulador PID completo
Componente Feed Forward para la compensacin de perturbaciones (entrada FF)
En la regulacin PID clsica el regulador reacciona a las modificaciones de la salida de los procesos de regulacin (circuito de regulacin cerrado). En caso de perturbacin el regulador slo reacciona si el valor real difiere del valor terico. La funcin Feed Forward permite la compensacin de una perturbacin medible en cuanto aparece. Esta funcin diseada como circuito de regulacin abierto elimina el efecto de la perturbacin: en este caso se habla de una accin anticipativa de perturbaciones (Feed Forward). La componente de la entrada Feed Forward en la magnitud de posicionado del regulador se aplica tras la inclusin del sentido del regulador de forma directa / inversa. El clculo se efecta segn la siguiente frmula:
( FF ff_inf ) ( otff_sup otff_inf ) out_ff = -------------------------------------------------------------------------------------------- + otff_inf ( ff_sup ff_inf )
En la seccin "Ejemplo de aplicacin de la funcin Feed Forward , p. 380" encontrar la representacin de un ejemplo concreto de aplicacin para esta funcin.
Nota: Si ff_sup = ff_inf, se ignorar el clculo de la componente Feed_Forward.
33002250
l l l l l l l
Otras caractersticas
El bloque dispone adems de las siguientes propiedades: El parmetro outbias permite asegurar una precisin en el punto de trabajo si el proceso no contiene ninguna componente integral (ti = 0). En la modalidad Automtica la salida OUT est limitada al rango comprendido entre out_min y out_max, en la modalidad Manual y Tracking al rango entre out_inf y out_sup. Si el valor calculado por el bloque de funcin (o escrito por el usuario en modalidad manual) supera uno de estos valores lmite, se recortar el valor de OUT. En cambio, la salida del valor incremental OUT_D no tendr jams en consideracin este recorte. Esto permite al bloque de funcin PIDFF controlar a un bloque de funcin SERVO sin necesidad de sensado de la posicin del actuador (regulacin flotante). La velocidad de crecimiento de la salida se limitar a travs del parmetro outrate. La seleccin de la accin directa / inversa (parmetro rev_dir) permite adaptar el sentido del regulador a la vinculacin actuador / proceso. La componente diferencial puede actuar sobre el valor real (pv_dev = 0), as como sobre la desviacin (pv_dev = 1). La limitacin superior e inferior del valor terico se encuentran en pv_inf y pv_sup. El bloque puede funcionar tambin en modalidad integral pura (con kp = 0).
371
PIDFF: Regulador PID completo
Modalidades de servicio
Seleccin de las modalidades de servicio
El bloque de funcin PIDFF dispone de tres modalidades de servicio: Automtico, Manual y Tracking. La siguiente tabla muestra que la modalidad Tracking tiene prioridad ante las otras modalidades de servicio. Estas modalidades se pueden seleccionar a travs de las entradas MAN_AUTO y TR_S.
Modalidad de servicio
Automtico
TR_S
0
MAN_AUTO
1
Significado
Las salidas OUT y OUTD se corresponden con el resultado de los clculos efectuados por el bloque. Los valores lmite para la salida OUT son out_min y out_max. La salida OUT no se ajusta a travs del bloque de funcin. El usuario podr ajustar directamente este valor. No obstante, OUT permanece limitado; en esta modalidad se trata de los valores lmite out_inf y out_sup (en lugar de out_min y out_max en la modalidad Automtico). La entrada TR_I se transfiere a la salida OUT. Como en la modalidad manual, OUT se encuentra entre los valores lmite out_inf y out_sup.
Manual
Tracking
01
Conmutacin Manual > Automtico o Tracking > Automtico
El tipo de conmutacin depende del bump:
Si ...
bump = 0
Entonces ...
se efecta la conmutacin sin brusquedad. Nota: Si ti = 0, se calcula de nuevo el parmetro outbias. De esta forma pueden arrancar de nuevo los valores OUT sin brusquedad comenzando con el ltimo valor de la modalidad anterior. se puede efecta la conmutacin con brusquedad.
bump = 1
372
33002250
PIDFF: Regulador PID completo
Ecuaciones detalladas
Vista general
En esta seccin se representan las ecuaciones detalladas sobre los siguientes casos: Denominacin de las variables intermediarias y las funciones ms importantes utilizadas en las ecuaciones. Algoritmo absoluto, p. 375 Algoritmo incremental regulador PID, p. 376 Algoritmos incrementales normales (aw_type = 0) Con medida Antiwindup sin brusquedad (aw_type = 1) Algoritmo incremental en modalidad integral, p. 378 Algoritmos incrementales normales (aw_type = 0) Con medida Antiwindup sin brusquedad (aw_type = 1) En las siguientes ecuaciones se utilizarn diferentes variables y funciones. Las variables correspondientes a los parmetros del mdulo de funcin no se describirn de nuevo. Sin embargo, las variables intermediarias ms importantes y las funciones utilizadas se describen en la siguiente tabla:
Denominacin
33002250
l l
l l
l l l l
373
PIDFF: Regulador PID completo
Explicacin de las variables intermediarias
Aqu encontrar una explicacin sobre las variables intermediarias ms importantes:
Variable intermediaria
DEV_WGH dt K
Significado
DEV_WGH = PV - (1 - ovs_att) * SP Tiempo transcurrido desde la ltima ejecucin del mdulo de funcin Factor de amplificacin de la componente integral y diferencial. La amplificacin vara dependiendo de la estructura del mdulo de funcin (mixta o paralela) y depende adems de si se aplica la componente proporcional o no. Si mix_par = 0 (estructura mixta) y kp <> 0, rige K = kp Si mix_par = 1 (estructura paralela) o bien kp = 0, rige:) K = factor de escala = ou t_s up out_inf = -----------------------------------------------pv_s up pv_inf
(new) (old) OUTc sense TermAW TermD TermFF TermI TermP VAR
Valor que se calcular en la ejecucin actual del mdulo de funcin Valor que se calcul en la ejecucin anterior del mdulo de funcin Valor de salida calculado antes de la limitacin Sentido del regulador Valor de la medida Antiwindup sin brusquedad Valor de la componente diferencial Valor de la componente Feed Forward (compensacin de perturbacin) Valor de la componente integral Valor de la componente proporcional Variable utilizada para el clculo de la componente diferencial. Su valor depende del parmetro pv_dev : Si pv_dev = 0, VAR = PV Si pv_dev = 1, VAR = dev
374
l l l l
33002250
PIDFF: Regulador PID completo
Explicacin de las funciones
Aqu encontrar una explicacin sobre las funciones ms importantes:
Funcin
Sentido del regulador
Significado
El sentido del regulador dispone de las siguientes opciones de direccionado: +1 Se trata de una accin directa (rev_dir = 0), es decir, que una desviacin positiva (PV - SP) genera un crecimiento del valor de salida. -1 Se trata de una accin inversa (rev_dir = 1), es decir, que una desviacin positiva (PV - SP) genera una disminucin del valor de salida.
Funcin limitar
Funcin de limitacin para la salida del mdulo de funcin
Algoritmo absoluto
Las siguientes ecuaciones rigen con los correctores PD ( ti = 0);
OUT = TermP + TermD + TermFF + outbias OUTD = OUTP ( new ) OUTP ( old ) OUT = limiter ( OUT )
Valor de la componente proporcional TermP TermP = sense kp dev Valor de la componente diferencial TermD
td TermD ( old ) + K td kd ( VAR( new ) VAR ( old ) ) TermD = sense --------------------------------------------------------------------------------------------------------------------------------------------kd dt + td Valor de la componente Feed Forward TermFF ( FF ff_inf ) ( otff_sup otff_inf ) TermFF = -------------------------------------------------------------------------------------------- + otff_inf ff_sup ff_inf
33002250
l l
(x(t)) = x(t) x(t 1)
375
PIDFF: Regulador PID completo
Ecuaciones detalladas: Algoritmo incremental regulador PID
Algoritmo incremental regulador PID
Para los reguladores PID ( ti > 0) se distinguen las ecuaciones dependiendo del elemento aw_type segn los siguientes casos:
Elemento
aw_type = 0 aw_type = 1
Significado
Algoritmos incrementales normales Con medida Antiwindup sin brusquedad
Regulador PID: aw_type = 0
Las siguientes ecuaciones rigen para algoritmos incrementales normales de reguladores PID;
OUTD = TermP + TermI + TermD + TermFF OUT = limiter ( OUT )
Si en_rcpy = 0, rige: OUT = OUT ( old ) + OUTD ( new ) Si en_rcpy = 1, rige: OUT = RCPY + OUTD ( new ) Valor de la componente proporcional TermP:
TermP = sense kp [ (DEV_WGH ) ]
Valor de la componente integral TermI: dt TermI = sense kp ---- dev ti Valor de la componente diferencial TermD
td TermD ( old ) + K td kd ( VAR ( new) VAR ( old ) ) TermD = sense --------------------------------------------------------------------------------------------------------------------------------------------kd dt + td
Valor de la componente Feed Forward TermFF ( FF ff_inf ) ( otff_sup otff_inf ) TermFF = -------------------------------------------------------------------------------------------- + otff_inf ( ff_sup ff_inf )
376
33002250
PIDFF: Regulador PID completo
Regulador PID: aw_type = 1
Las siguientes ecuaciones rigen para algoritmos incrementales de reguladores PID con medida Antiwindup sin brusquedad;
OUTD = TermP + TermI + TermD + TermFF + TermAW OUTc = OUTc ( old ) + OUTD ( new ) OUT = limiter ( OUTc )
Valor de la componente proporcional TermP:
TermP = sense kp [ (DEV_WGH) ]
Valor de la componente integral TermI: dt TermI = sense kp ---- dev ti Valor de la componente diferencial TermD
td TermD ( old ) + K td kd ( VAR ( new ) VAR ( old ) ) TermD = sense --------------------------------------------------------------------------------------------------------------------------------------------kd dt + td
Valor de la componente Feed Forward TermFF
( FF ff_inf ) ( otff_sup otff_inf ) TermFF = -------------------------------------------------------------------------------------------- + otff_inf ( ff_sup ff_inf )
Valor de la medida Antiwindup sin brusquedad TermAW Si en_rcpy = 0, rige: dt TermAW = ---- [ OUT(old) OUTc(old) ] ti Si en_rcpy = 1, rige: dt TermAW = ---- [ RCPY OUTc(old) ] ti
33002250
377
PIDFF: Regulador PID completo
Ecuaciones detalladas: Algoritmo incremental en modalidad integral
Algoritmo incremental en modalidad integral
El regulado se puede utilizar en modalidad integral pura (kp = 0). Tambin aqu las ecuaciones se diferencian en funcin del elemento aw_type de acuerdo con los siguientes casos:
Elemento
aw_type = 0 aw_type = 1
Significado
Algoritmos incrementales normales Con medida Antiwindup sin brusquedad
Modalidad integral aw_type =0
Las siguientes ecuaciones son vlidas para los algoritmos incrementales normales de reguladores en modalidad integral;
OUTD = TermI + TermFF OUT = limiter ( OUT )
Si en_rcpy = 0, rige:
OUT = OUT ( old ) + OUTD ( new ) Si en_rcpy = 1, rige: OUT = RCPY + OUTD ( new )
Valor de la componente integral TermI:
dt TermI = sense ---- dev ti
Valor de la componente Feed Forward TermFF
( FF ff_inf ) ( otff_sup otff_inf ) TermFF = -------------------------------------------------------------------------------------------- + otff_inf ( ff_sup ff_inf )
378
33002250
PIDFF: Regulador PID completo
Modalidad integral aw_type =1
Las siguientes ecuaciones rigen para algoritmos incrementales de reguladores integrales con medida Antiwindup sin brusquedad;
OUTD = TermI + TermFF + TermAW OUTc = OUTc ( old ) + OUTD ( new ) OUT = limiter ( OUTc )
Valor de la componente integral TermI: dt TermI = sense ---- dev ti Valor de la componente Feed Forward TermFF ( FF ff_inf ) ( otff_sup otff_inf ) TermFF = -------------------------------------------------------------------------------------------- + otff_inf ( ff_sup ff_inf ) Valor de la medida Antiwindup sin brusquedad TermAW Si en_rcpy = 0, rige: dt TermAW = ---- [ OUT(old) OUTc(old) ] ti Si en_rcpy = 1, rige: dt TermAW = ---- [ RCPY OUTc(old) ] ti
Ejemplos del bloque PIDFF
Vista general de los ejemplos
En este captulo encontrar los siguientes ejemplos: Ejemplo de aplicacin de la funcin Feed Forward , p. 380 Ejemplos clsicos de regulacin programados a travs del bloque de funcin PIDFF: Ejemplo de organizacin en cascada de dos reguladores, p. 382 Ejemplo de una regulacin similar a la cascada, p. 384
33002250
l l
l l
379
PIDFF: Regulador PID completo
Ejemplo de aplicacin de la funcin Feed Forward
Se desea regular la temperatura PV2 de la salida del circuito secundario de in intercambiador. Un regulador PID controla la vlvula de entrada para el aire caliente dependiendo de PV2 y del valor terico SP. La temperatura del agua fra se considera en este proceso de regulacin como una magnitud medible de perturbacin. La funcin Feed Forward permite una reaccin en cuanto se modifique la temperatura del agua fra, y no cuando PV2 haya descendido. Representacin del circuito de regulacin:
SP + PV TT2 PV2 PID + + Funcin de transmisin FF
Qc Dampf TT1 Magnitud de perturbacin Condensador
Se adoptan las siguientes hiptesis: La temperatura de salida del condensador (temperatura del agua fra) vara entre 5 C y 25 C, con un valor medio de 15 C. Una modificacin de la temperatura DT repercute ntegramente sobre la temperatura de salida del intercambiador. Para compensar un aumento de temperatura (o un descenso) de 5 C en la salida del intercambiador se deber cerrar (o abrir) la vlvula de control de vapor un 10 %.
380
l l l
33002250
PIDFF: Regulador PID completo
Los parmetros de la entrada Feed Forward debern ajustarse de tal forma, que la temperatura del agua fra influya de la siguiente forma sobre la vlvula de control de vapor:
Rango de temperatura
15 C 10% por cada 5 C entre 5 y 25 C
+ 20 + 10
Repercusiones
sin repercusin
Salida %
0 5 - 10 - 20 10 15 20 25 5
Temperatura del agua fra (oC)
Ajustes que se deben realizar
Elemento
ff_sup ff_inf otff_sup otff_inf
Valor
25 C 5 C 10 % - 10 %
33002250
381
PIDFF: Regulador PID completo
Ejemplo de organizacin en cascada de dos reguladores
A continuacin encontrar la representacin del diagrama de funciones, parte 1:
FBI_12_5 (1)
SAMPLETM
MASTER_ST
INTERVAL DELSCANS
MASTER (2)
PIDFF
MASTER_PV MASTER_SP SLAVE_SP 1 MASTER_PARA SLAVE_PV SLAVE_MAO
ENO EN PV OUT OUTD SP FF RCPY MAN_AUTO MA_O PARA INFO TR_I STATUS TR_S
FBI_12_3 (3)
SP_SEL
MASTER_MA
RSP SP_RSP PARA PV MA_I
SP LSP_MEM STATUS
SLAVE_SP
382
33002250
PIDFF: Regulador PID completo
A continuacin encontrar la representacin del diagrama de funciones, parte 2:
FBI_12_4 (4)
SAMPLETM
SLAVE_ST
INTERVAL DELSCANS
SLAVE (5)
PIDFF
SLAVE_PV
1
OUT 1 SLAVE_PARA
ENO EN PV OUT OUTD SP FF RCPY MAN_AUTO MA_O PARA INFO TR_I STATUS TR_S
SLAVE_OUT
FBI_12_2 (6)
MS IN FORC MA_FORC MAN_AUTO PARA TR_I TR_S OUT
OUT
SLAVE_MAN_AUTO SLAVE_PARA_MS
OUTD MA_O STATUS
SLAVE_MAO
33002250
383
PIDFF: Regulador PID completo
Ejemplo de una regulacin similar a la cascada
A continuacin encontrar la representacin del diagrama de funciones:
FBI_13_1 (1)
PIDFF
TC2_PV TC2_SP TC2_OUT 1 TC2_PARA
PV OUT SP OUTD FF RCPY MA_O MAN_AUTO INFO PARA STATUS TR_I TR_S
FBI_13_2 (2)
TC2_OV
PIDFF
TC3_PV TC3_SP TC2_OUT 1 TC3_PARA
2
TC3_OUT
OUT PV SP OUTD FF RCPY MA_O MAN_AUTO INFO PARA STATUS TR_I TR_S
FBI_13_3 (4)
MS
TC2_FORC_MS TC2_MA_FORC TC2_MA_C TC2_PARA_MS
IN FORC MA_FORC MAN_AUTO PARA TR_I TR_S
OUT
TC2_OUT
OUTD MA_O STATUS
TC2_MA_O
FBI_13_5 (3)
SELECTOR
1 2
IN1 IN2
OUT SELECT
OUT SELECT
384
33002250
PIDFF: Regulador PID completo
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Significado
Error en un clculo en valores con coma flotante Deteccin de un valor no permitido en una entrada de coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante Se mostrarn los siguientes comportamientos: La entrada SP se encuentra fuera del rango [pv_inf, pv_sup]: para el clculo, el bloque de funcin utiliza el valor pv_inf, o bien pv_sup. Uno de los parmetros kp, dband, gain_kp, outrate es negativo: el bloque de funcin utilizar el valor 0 en lugar del valor del parmetro errneo. kd < 1 (con td <> 0): el bloque de funcin utilizar el valor 1 en lugar del valor del parmetro errneo de kd. El parmetro ovs_att est fuera del rango [0, 1]: Para el clculo, el bloque de funcin utiliza el valor 0 1. Uno de los parmetros out_min out_max se encuentra fuera del rango [out_inf, out_sup]. El bloque de funcin utilizar para el clculo el valor out_inf out_sup. El parmetro outbias, otff_inf otff_sup se encuentra fuera del rango [(out_min - out_max), (out_max - out_min)]. El bloque de funcin utilizar para el clculo el valor (out_min - out_max) o. (out_max - out_min). La salida OUT no ha alcanzado el valor lmite inferior out_min (vase Nota) La salida OUT ha alcanzado el valor lmite superior out_max (vase Nota) Los valores lmite pv_inf y pv_sup son idnticos
Bit 5 = 1 Bit 6 = 1 Bit 7 = 1
Nota sobre la salida OUT
Nota: En la modalidad manual estos bits slo permanecern en 1 durante un ciclo del programa. Si el usuario introduce para OUT un valor que supere uno de estos valores lmite, el bloque de funcin pondr a 1 el bit 5 6 y recortar el valor indicado por el usuario. En la siguiente ejecucin del bloque de funcin el valor de OUT ya no estar fuera del rango y los bits 5 6 volvern a estar a cero.
33002250
l l l l l l
385
PIDFF: Regulador PID completo
Aviso de error
Este error aparece si en una entrada se detecta un valor no flotante, si en un clculo en valores con coma flotante se presenta un problema o si los valores lmite pv_inf y pv_sup del regulador son idnticos. En este caso, las salidas OUT, OUTD, MA_O e INFO permanecern sin variacin. En los siguientes casos se emitir una advertencia: Uno de los parmetros kp, dband, gain_kp, outrate es negativo: el bloque de funcin utilizar entonces el valor 0 en lugar del valor del parmetro errneo. kd < 1 (con td <> 0): el bloque de funcin utilizar el valor 1 en lugar del valor del parmetro errneo de kd. El parmetro ovs_att est fuera del rango [0, 1]: Para el clculo, el bloque de funcin utiliza el valor 0 1. El parmetro out_min el out_max se encuentra fuera del rango [out_inf, out_sup]. El bloque de funcin utilizar para el clculo el valor out_inf out_sup. El parmetro outbias, otff_inf otff_sup se encuentra fuera del rango [(out_min out_max), (out_max - out_min)]. El bloque de funcin utilizar para el clculo el valor (out_min - out_max) o. (out_max - out_min).
Advertencia
386
l l l l l
33002250
PIDP1: Regulador PID con estructura paralela
40
Vista general
Introduccin Contenido:
Este captulo describe el bloque PIDP1. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Parametrizacin del regulador PIDP1 Modalidades de servicio Frmulas detalladas Error de tiempo de ejecucin
Pgina
388 389 391 393 394 396
33002250
387
PIDP1: Regulador PID con estructura paralela
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin realiza un regulador PID en una estructura paralela pura. Entre el valor terico SP y la magnitud de regulacin PV se forma la diferencia de regulacin ERR. Esta diferencia de regulacin ERR provoca una modificacin de la magnitud de posicionado Y. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin tiene las siguientes propiedades: Regulador PID en una estructura paralela pura Cada componente P, I o D se puede desconectar individualmente. Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico Medida Antiwindup slo si est activa la componente I Reseteado Antiwindup Modalidades de servicio: Manual, Detenido, Automtico Conmutacin manual/automtico sin brusquedad Componente D conmutable a magnitud de entrada PV o diferencia de regulacin ERR Componente D con retardo de tiempo variable
Funcin de transferencia
388
l l l l l l l l l
La funcin de transferencia es:
KI KD s G(s) = KP + ------ + --------------------------------s 1 s + -----------------------TD_LAG
YD YI YP
Explicacin de las magnitudes:
Magnitud
YD YI YP
Significado
Componente D Componente I Componente P
33002250
PIDP1: Regulador PID con estructura paralela
Representacin
Smbolo
Representacin del bloque:
PIDP1
BOOL BOOL REAL REAL REAL BOOL BOOL REAL REAL REAL TIME REAL REAL REAL
MAN HALT SP PV BIAS D_ON_X REVERS KP KI KD TD_LAG YMAX YMIN YMAN
Y ERR QMAX QMIN
REAL REAL BOOL BOOL
33002250
389
PIDP1: Regulador PID con estructura paralela
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros
MAN HALT SP PV BIAS D_ON_X
Tipo de datos
BOOL BOOL REAL REAL REAL BOOL
Significado
"1": Modalidad manual "1": Modalidad de servicio Detenido Entrada de valor terico Magnitud de entrada Entrada de la magnitud de perturbacin "1": Componente D referida a la magnitud de regulacin; "0": Componente D referida a la diferencia de regulacin "1": Inversin de salida Amplificacin proporcional (Factor de amplificacin) Amplificacin de la integracin] Amplificacin de la diferenciacin] Tiempo de retardo, componente D Lmite superior de posicionado Lmite inferior de posicionado Valor de posicionado manual Magnitud de posicionado Diferencia de regulacin "1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
REVERS KP KI KD TD_LAG YMAX YMIN YMAN Y ERR QMAX QMIN
BOOL REAL REAL REAL TIME REAL REAL REAL REAL REAL BOOL BOOL
390
33002250
PIDP1: Regulador PID con estructura paralela
Parametrizacin del regulador PIDP1
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del regulador PIDP1:
ERR KP P
SP Reseteado Antiwindup I YP + ERR YI + + + YD KD, TD_LAG 0 1 PV D_ON_X YMAN D + + YMAX YMIN QMAX Servicio control de la modalidad Y
KI
QMIN
BIAS
Parametrizacin
La estructura del regulador PID1 se representa en el Diagrama de estructura, p. 391. La parametrizacin del regulador PIDP1 tiene lugar primeramente a travs de los parmetros PID puros, o sea, la amplificacin proporcional KP, la amplificacin de la integracin KI y la amplificacin de la diferenciacin KD. Las componentes P, I y D se pueden desconectar individualmente poniendo a 0 la correspondiente entrada (KP, KI o KD). La componente D se retarda con la constante de tiempo TD_LAG. La componente D se puede formar a travs de la diferencia de regulacin ERR (D_ON_X = 0) o a travs de la magnitud de regulacin PV (D_ON_X = 1). Si se determina la componente D a travs de la magnitud de regulacin PV, no existir ningn salto debido a la componente D, en caso de modificaciones en las magnitudes de guiado (modificaciones en la entrada SP). Dicha componente D se manifiesta por lo general solamente en el caso de perturbaciones o modificaciones en el proceso.
33002250
391
PIDP1: Regulador PID con estructura paralela
Inversin del sentido de regulacin
Se puede lograr un comportamiento inverso del regulador poniendo a 1 la entrada REVERS. REVERS = 0 provoca que la salida aumente en el caso de una magnitud de perturbacin positiva. REVERS = 1 provoca que caiga el valor de salida en el caso de una magnitud de perturbacin positiva. Los lmites YMAX e YMIN limitan la salida tanto hacia arriba como hacia abajo. De esta manera rige YMIN Y YMAX. Se visualiza a travs de ambas marcas QMAX y QMIN cuando se alcanzan los valores lmites o una limitacin de la seal de salida: QMAX = 1 si Y YMAX QMIN = 1 si Y YMIN
Limitacin de magnitudes de posicionado
Reseteado Antiwindup
Seleccin de los tipos de reguladores
392
l l
El lmite superior YMAX para la limitacin del valor de la magnitud de posicionado deber seleccionarse mayor que el lmite inferior YMIN.
Si tiene lugar una limitacin de las magnitudes de posicionado se debe contemplar mediante el reseteado Antiwindup que la componente integral "no pueda crecer por encima de todos los lmites". La medida Antiwindup se ejecutar solamente cuando la componente I del regulador no se encuentre desconectada. Los lmites para el Antiwindup son aqu los mismos que para la limitacin de las magnitudes de posicionado. No se considera la componente D para la medida Antiwindup, de tal forma, que los picos provocados por la componente D, no se recortarn mediante la medida Antiwindup. La medida de reseteado Antiwindup corrige la componente I de tal forma, que rija:
YMIN YP BIAS YI YMAX YP BIAS
Existen diferentes tipos de reguladores que se seleccionan a travs de los parmetros KP, KI y KD.
Tipo de regulador
Regulador P Regulador PI Regulador PD Regulador PID Regulador I
KP
>0 >0 >0 >0 =0
KI
=0 >0 =0 >0 >0
KD
=0 =0 >0 >0 =0
33002250
PIDP1: Regulador PID con estructura paralela
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen tres modalidades de servicio que se seleccionan a travs de los parmetros MAN y HALT:
Modalidad de servicio
Automtico Manual Detenido
MAN
0 1 0
HALT
0 01 1
Modalidad automtica
En la modalidad de servicio Automtico, se determina la salida de posicionado Y a travs de un algoritmo discreto PID, dependiendo de la magnitud de regulacin PV y de la magnitud de guiado SP. La salida de posicionado est limitada por YMAX e YMIN. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad debido a que la salida Y puede adoptar cualquier valor entre YMAX e YMIN, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. No obstante, si la conmutacin debe tener lugar sin brusquedad, existen dos posibilidades que se aclaran a modo de ejemplo para un regulador PID1 (vase Conmutacin de Automtico a Manual, p. 329).
Modalidad manual
En la modalidad de servicio Manual se transmite el valor de posicionado manual YMAN de forma fija a la salida de posicionado Y. No obstante, la salida de posicionado se limita a travs de YMAX e YMIN. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado Anti-Windup. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
Modalidad de servicio Detenido
En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba, el bloque de funcin no modifica la salida de regulacin Y (el regulador permanece detenido), o sea Y = Y(old). Las magnitudes internas se guiarn de tal manera, que la suma de sus componentes se corresponda con la salida de posicionado, de tal forma que el regulador (en caso de componente I conectada) siga su marcha sin brusquedad a partir de su ubicacin actual. Los lmites de posicionado son al mismo tiempo tambin los lmites para el reseteado AntiWindup. La componente D se pondr automticamente a 0 en esta modalidad de servicio.
33002250
393
PIDP1: Regulador PID con estructura paralela
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las frmulas:
Magnitud Significado
Diferencia de tiempo entre el ciclo actual y el anterior Diferencia de regulacin (SP - PV) Valor de la diferencia de regulacin del ciclo de exploracin actual Valor de la diferencia de regulacin del ciclo de exploracin anterior Magnitud de perturbacin Valor de la magnitud de regulacin del ciclo de exploracin actual Valor de la magnitud de regulacin del ciclo de exploracin anterior Salida actual (modalidad de servicio Detenido) o YMAN (modalidad de servicio Manual) Componente D Componente I Componente P
dt ERR ERR ( new ) ERR ( ol d )
BIAS
PV ( new ) PV ( old )
Y YD YI YP
Magnitud de posicionado
La magnitud de posicionado se componen de diversas partes de magnitudes: Y = YP + YI + YD + BIAS Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir:
YMIN Y YMAX
Diferencia de regulacin
La diferencia de regulacin se determina de la siguiente forma:
Si ...
REVERS = 0 REVERS = 1
Entonces...
ERR = SP - PV ERR = PV - SP
394
33002250
PIDP1: Regulador PID con estructura paralela
Componente P YP para todas las modalidades de servicio Componente I YI para la modalidad de servicio Automtico
Componente I YI para la modalidad de servicio Manual y Detenido
33002250
l l l l l
Vista general para el clculo de las componentes de regulacin
A continuacin encontrar una vista general de los diferentes clculos de las componentes de regulacin dependiendo de los factores de amplificacin KP, KI y KD: Componente P YP para las modalidades de servicio Manual, Detenido, Automtico Componente I YI para la modalidad de servicio Automtico Componente I YI para la modalidad de servicio Manual y Detenido Componente D YD para la modalidad de servicio Automtico Componente D YD para la modalidad de servicio Manual y Detenido El YP para las modalidades de servicio Manual, Detenido y Automtico se averigua de la siguiente forma:
YP = KP ERR
El YI para la modalidad de servicio Automtico se averigua de la siguiente forma: Para KI > 0 rige:
ERR ( new ) + ERR ( old ) YI ( new ) = YI ( old ) + KI dt ----------------------------------------------------2 Para KI = 0 rige: YI = 0
La componente I se forma de acuerdo a la regla del trapecio. El YI para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: Para KI > 0 rige:
YI = Y ( YP BIAS ) Para KI = 0 rige: YI = 0
395
PIDP1: Regulador PID con estructura paralela
Componente D YD para la modalidad de servicio Automtico
El YD para la modalidad de servicio Automtico y Cascada se averigua de la siguiente forma: Para KD > 0 y D_ON_X = 0 rige:
TD_LAG YD ( new ) = ---------------------------------- ( YD ( ol d ) + KD ( ERR ( new ) ERR ( old ) ) ) dt + TD_LAG
Para KD > 0 y D_ON_X = 1 rige: TD_LAG YD ( new ) = ---------------------------------- ( YD ( ol d ) + KD ( PV ( old ) PV ( new ) ) ) dt + TD_LAG Para KD = 0 rige: YD = 0
Componente D YD para la modalidad de servicio Manual y Detenido
El YD para la modalidad de servicio Manual y Detenido se averigua de la siguiente forma: YD = 0
Error de tiempo de ejecucin
Aviso de error
En YMAX < YMIN se efecta un aviso de error.
396
33002250
PIP: Regulador PIP en cascada
41
Vista general
Introduccin Contenido:
Este captulo describe el bloque PIP. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Diagrama de estructura del bloque de funcin PIP Parametrizacin del regulador en cascada PIP Modalidades de servicio Frmulas detalladas Error de tiempo de ejecucin
Pgina
398 399 401 402 404 406 407
33002250
397
PIP: Regulador PIP en cascada
Descripcin breve
Descripcin de funciones
El mdulo de funcin representa un regulador en cascada compuesto por un regulador de guiado PI y un regulador de seguimiento P. La diferencia de regulacin ERR se forma entre la magnitud de guiado SP y la magnitud de regulacin PV. Mediante esa diferencia de regulacin, el regulador de guiado genera un valor terico SP2 para el regulador de seguimiento. Tomando como base la diferencia entre SP2 y PV2, el regulador de seguimiento genera la magnitud de posicionado Y. Como parmetros adicionales se pueden configurar EN y ENO .
Propiedades
El mdulo de funcin dispone de las siguientes propiedades: PI como regulador de guiado, P como regulador de seguimiento Limitacin de magnitudes de posicionado Reseteado Anti-Windup para el regulador PI Modalidades de servicio Manual, Regulacin de valor fijo, Detenido, Automtico
Funcin de transferencia
Regulador de seguimiento (regulador P)
G( s) = gain2
Amplificacin proporcional
La amplificacin proporcional del regulador de guiado se determina de la siguiente forma:
YP = gain1 ERR
398
l l l l
Las funciones de transferencia para los reguladores son:
Regulador
Regulador de guiado (regulador PI)
Funcin de transferencia 1 G(s) = ga in1 1 + ----------ti s
33002250
PIP: Regulador PIP en cascada
Representacin
Smbolo
Representacin del bloque
PIP
REAL REAL REAL Mode_PIP Para_PIP REAL REAL REAL
SP PV PV2 MODE PARA YMAN SP_FIX OFF
Y ERR SP2 STATUS
REAL REAL REAL Stat_MAXMIN
Descripcin de parmetros PIP
Descripcin de parmetros del bloque
Parmetros
SP PV PV2 MODE PARA YMAN SP_FIX OFF Y ERR SP2 STATUS
Tipo de datos
REAL REAL REAL Mode_PIP Para_PIP REAL REAL REAL REAL REAL REAL Stat_MAXMIN
Significado
Magnitud de guiado Magnitud de regulacin para el regulador de guiado Magnitud de regulacin para el regulador de seguimiento (magnitud del regulador auxiliar) Modalidades de servicio Parmetros Valor manual (de la salida Y) Valor fijo (= Valor manual de la magnitud de guiado del regulador de seguimiento) Offset en la salida del regulador P Magnitud de posicionado Diferencia de regulacin Valor terico para el regulador de seguimiento Estado de la salida Y
33002250
399
PIP: Regulador PIP en cascada
Descripcin de parmetros Mode_PIP
Descripcin de la estructura de datos
Elemento
man halt fix
Tipo de datos
BOOL BOOL BOOL
Significado
"1": Modalidad de servicio Manual "1": Modalidad de servicio Detenido "1": Modalidad de servicio Regulacin de valor fijo
Descripcin de parmetros Para_PIP
Descripcin de la estructura de datos
Elemento
gain1 ti gain2 ymax ymin
Tipo de datos
REAL TIME REAL REAL REAL
Significado
Amplificacin proporcional (factor de amplificacin) para el regulador PI Constante de tiempo de posicionado para el regulador PI Amplificacin proporcional (factor de amplificacin) para el regulador P Lmite superior de posicionado Lmite inferior de posicionado
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento
qmax qmin
Tipo de datos
BOOL BOOL
Significado
"1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
400
33002250
PIP: Regulador PIP en cascada
Diagrama de estructura del bloque de funcin PIP
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del regulador PIP:
OFF
SP_FIX
ERR 1 0 gain1, ti PV fix + PV2 +
SP2
Regulador PI SP +
Regulador P + gain2 + a)
Proceso
b)
Y_MAN 1 0 a) man b) ymax ymin q_max Y q_min
33002250
401
PIP: Regulador PIP en cascada
Parametrizacin del regulador en cascada PIP
Esquema de bloques
Esquema de bloques del regulador en cascada PIP
Proceso
SP PI PV
Y1
SP2 P PV2 Y S1
S2
Parametrizacin
La estructura del regulador PIP se representa en el Esquema de bloques, p. 402. La parametrizacin del bloque de funcin tiene lugar primeramente a travs de los parmetros PI puros, o sea, la amplificacin proporcional gain1 y la constante de tiempo de posicionado ti. La componente I se puede desconectar poniendo ti a cero. A continuacin le sigue la parametrizacin del regulador P a travs de la amplificacin proporcional gain2.
Limitacin de magnitudes de posicionado
En la salida del regulador de seguimiento tiene lugar una limitacin de las magnitudes de posicionado, de forma que: ymin Y ymax
402
33002250
PIP: Regulador PIP en cascada
Reseteado AntiWindup (regulador PI)
Si tiene lugar una limitacin de las magnitudes de posicionado, mediante el reseteado Antiwindup se debe vigilar que la componente integral del regulador de guiado no pueda rebasar todos los lmites. La medida Antiwindup se ejecutar solamente si la componente I del regulador no est desconectada (ti = 0). Los lmites Antiwindup para el regulador de guiado PI se adaptan dinmicamente a la diferencia de regulacin actual del regulador de seguimiento y a los lmites ymax e ymin. Si tiene lugar una limitacin de las magnitudes de posicionado, la componente integral se limitar de la siguiente forma: Al alcanzar el lmite superior:
33002250
l l
ymax OFF YI = ------------------------------- + PV YP gain2
Al alcanzar el lmite inferior:
ymin OFF YI = ------------------------------ + PV YP gain2
403
PIP: Regulador PIP en cascada
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen cuatro modalidades de servicio que se seleccionan mediante los elementos man, halt y fix.
Modalidad de servicio
Automtico Manual Detenido Regulacin de valor fijo
man
0 1 0 0
halt
0 01 1 0
fix
0 0 0 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico se determina la salida de posicionado Y mediante la regulacin en funcin de las magnitudes de regulacin PV, PV2 y las magnitudes de guiado SP, SP2. La salida de posicionado est limitada por ymax e ymin. La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad, debido a que la salida Y puede adoptar cualquier valor entre ymax e ymin, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. Pero si la conmutacin debe tener lugar sin brusquedad, existen dos posibilidades, que se aclaran a modo de ejemplo para un regulador PID (vase Conmutacin de Automtico a Manual, p. 315 ) .
Modalidad de servicio Manual
En la modalidad de servicio Manual, el regulador P funciona en modo manual. La componente I del regulador PI se gua para lograr una conmutacin sin brusquedad. El valor de posicionado manual YMAN se transmite de forma fija al valor de posicionado de salida Y. Pero la salida de posicionado se limita, no obstante, a travs de ymax e ymin. La componente integral del regulador de guiado ser guiada de tal manera, que el regulador (con componente I conectada) pueda conmutar de Manual a Automtico sin brusquedad.
Modalidad de servicio Detenido
En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba y el bloque de funcin no modifica la salida de regulacin Y (el regulador permanece detenido), o sea Y = Y(old). La modalidad de servicio Detenido tambin es adecuada, entre otras cosas, para ajustar la salida Y del regulador mediante un mando externo. Las componentes internas se guiarn en el regulador de tal forma que ste contine su marcha sin brusquedad desde su posicin actual. Pero la salida de posicionado se limita, no obstante, a travs de ymax e ymin.
404
33002250
PIP: Regulador PIP en cascada
Modalidad de servicio Regulacin de valor fijo
En la modalidad de servicio Regulacin de valor fijo, el regulador P trabaja en la modalidad de servicio Automtico y el regulador PI en la modalidad de servicio Detenido. El valor fijo SP_FIX se transmite de forma fija a la salida de posicionado Y1 (= SP2) del regulador PI. La salida de posicionado Y del regulador PIP se limita con ymax e ymin. La componente integral del regulador de guiado ser guiada de tal manera, que el regulador (con componente I conectada) pueda conmutar sin brusquedad de Regulacin de valor fijo a Automtico.
33002250
405
PIP: Regulador PIP en cascada
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las siguientes frmulas:
Magnitud Significado
Diferencia de tiempo entre el ciclo actual y el anterior Diferencia de regulacin (SP - PV) Valor de la diferencia de regulacin del ciclo de exploracin actual Valor de la diferencia de regulacin del ciclo de exploracin anterior Offset en la salida del regulador P Magnitud de posicionado Y del regulador principal Componente I Componente P
dt ERR ERR ( new ) ERR ( ol d )
OFF Y Y1 YI YP
Modalidad de servicio Automtico
dt ERR ( new ) + ERR ( old) YI ( ne w ) = YI ( old ) + gain1 ---- ----------------------------------------------------ti 2
406
l l l l
Vista general para el clculo de las componentes de regulacin
A continuacin encontrar una vista general de los diferentes clculos de las componentes del regulador y de las salidas para las distintas modalidades de servicio: YI, Y, SP2 en la modalidad de servicio Automtico YI, Y y SP2 en la modalidad de servicio Manual YI, Y y SP2 en la modalidad de servicio Detenido YI, Y y SP2 en la modalidad de servicio Regulacin de valor fijo La seal de salida Y del regulador en cascada ser:
Y = ( SP2 PV2 ) gain2 + OFF
La seal de entrada SP2 del regulador de seguimiento ser:
SP2 = YP + YI
La componente integral YI del regulador de guiado para la modalidad de servicio Automtico se determina de la siguiente manera:
La componente I se forma de acuerdo a la regla del trapecio.
33002250
PIP: Regulador PIP en cascada
Modalidad de servicio Manual
La seal de salida Y del regulador en cascada ser:
Y = YMAN
La seal de entrada SP2 del regulador de seguimiento ser: Y OFF SP2 = --------------------- + PV2 gain2 La componente integral YI del regulador de guiado para la modalidad de servicio Manual se determina de la siguiente manera:
YI = SP2 ( SP PV ) gain1 Modalidad de servicio Detenido
La seal de salida Y del regulador en cascada ser:
Y = Y ( ol d )
La seal de entrada SP2 del regulador de seguimiento ser: Y OFF SP2 = --------------------- + PV2 gain2 La componente integral YI del regulador de guiado para la modalidad de servicio Detenido se determina de la siguiente manera:
YI = SP2 ( SP PV ) gain1 Modalidad de servicio Regulacin de valor fijo
La seal de salida Y del regulador en cascada ser:
Y = ( SP2 PV2 ) gain2 + OFF
La seal de entrada SP2 del regulador de seguimiento ser:
SP2 = SP_FIX
La componente integral YI del regulador de guiado para la modalidad de servicio Regulacin de valor fijo se determina de la siguiente manera:
YI = SP2 ( SP PV ) gain1
Error de tiempo de ejecucin
Aviso de error
Se generar un aviso de error si: existe un nmero de coma flotante no vlido en la entrada PV, PV2, YMAN o SP_FIX. ymax es < ymin.
33002250
l l
407
PIP: Regulador PIP en cascada
408
33002250
PPI: Regulador PPI en cascada
42
Vista general
Introduccin Contenido:
Este captulo describe el bloque PPI. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Diagrama de estructura del bloque de funcin PPI Parametrizacin del regulador en cascada PPI Modalidades de servicio Frmulas detalladas Error de tiempo de ejecucin
Pgina
410 411 413 414 416 417 418
33002250
409
PPI: Regulador PPI en cascada
Descripcin breve
Descripcin de funciones
El mdulo de funcin representa un regulador en cascada compuesto por un regulador de guiado P y un regulador de seguimiento PI. La diferencia de regulacin ERR se forma entre la magnitud de guiado SP y la magnitud de regulacin PV. Mediante esa diferencia de regulacin, el regulador de guiado genera un valor terico SP2 para el regulador de seguimiento. Tomando como base la diferencia entre SP2 y PV2, el regulador de seguimiento genera la magnitud de posicionado Y. Como parmetros adicionales se pueden configurar EN y ENO .
Propiedades
El mdulo de funcin dispone de las siguientes propiedades: P como regulador de guiado, PI como regulador de seguimiento Limitacin de magnitudes de posicionado Reseteado Anti-Windup para el regulador PI Modalidades de servicio Manual, Regulacin de valor fijo, Detenido, Automtico
Funcin de transferencia
Amplificacin proporcional
La amplificacin proporcional del regulador de seguimiento se determina de la siguiente forma:
YP = gain2 ( SP2 PV2 )
410
l l l l
Las funciones de transferencia para los reguladores son:
Regulador
Regulador de guiado (regulador P) Regulador de seguimiento (regulador PI)
Funcin de transferencia G(s) = ga in 1 1 G(s) = ga in2 1 + ----------ti s
33002250
PPI: Regulador PPI en cascada
Representacin
Smbolo
Representacin del bloque
PPI
REAL REAL REAL Mode_PIP Para_PIP REAL REAL REAL
SP PV PV2 MODE PARA YMAN SP_FIX OFF
Y ERR SP2 STATUS
REAL REAL REAL Stat_MAXMIN
Descripcin de parmetros PPI
Descripcin de parmetros del bloque
Parmetros
SP PV PV2 MODE PARA YMAN SP_FIX OFF Y ERR SP2 STATUS
Tipo de datos
REAL REAL REAL Mode_PPI Para_PPI REAL REAL REAL REAL REAL REAL Stat_MAXMIN
Significado
Magnitudes de guiado para el regulador de guiado Magnitud de regulacin para el regulador de guiado Magnitud de regulacin para el regulador de seguimiento (magnitud del regulador auxiliar) Modalidades de servicio Parmetros Valor manual (de la salida Y) Valor fijo (= Valor manual de la magnitud de guiado del regulador de seguimiento) Offset en la salida del regulador P Magnitud de posicionado Diferencia de regulacin Valor terico para el regulador de seguimiento Estado de la salida Y
33002250
411
PPI: Regulador PPI en cascada
Descripcin de parmetros Mode_PPI
Descripcin de la estructura de datos
Elemento
man halt fix
Tipo de datos
BOOL BOOL BOOL
Significado
"1": Modalidad de servicio Manual "1": Modalidad de servicio Detenido "1": Modalidad de servicio Regulacin de valor fijo
Descripcin de parmetros Para_PPI
Descripcin de la estructura de datos
Elemento
gain1 ti gain2 ymax ymin
Tipo de datos
REAL TIME REAL REAL REAL
Significado
Amplificacin proporcional (factor de amplificacin) para el regulador P Constante de tiempo de posicionado para el regulador PI Amplificacin proporcional (factor de amplificacin) para el regulador PI Lmite superior de posicionado Lmite inferior de posicionado
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento
qmax qmin
Tipo de datos
BOOL BOOL
Significado
"1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
412
33002250
PPI: Regulador PPI en cascada
Diagrama de estructura del bloque de funcin PPI
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del regulador PPI:
OFF
SP_FIX
ERR 1 + 0 +
SP2
Regulador P SP + PV gain1 +
Regulador PI
gain2, ti fix PV2
a)
Proceso
b)
Y_MAN 1 0 a) man b) ymax ymin qmax Y qmin
33002250
413
PPI: Regulador PPI en cascada
Parametrizacin del regulador en cascada PPI
Esquema de bloques
Esquema de bloques del regulador en cascada PPI
Proceso
SP P PV
Y1
SP2 PI PV2 Y S1
S2
Parametrizacin
La estructura del regulador PPI se representa en el Esquema de bloques, p. 414. La parametrizacin del bloque de funcin se efecta, en primer lugar, mediante la amplificacin proporcional gain1 y el Offset para la salida del regulador P (OFF). A continuacin le sigue la parametrizacin del regulador PI mediante la amplificacin proporcional gain2 y la constante de tiempo de posicionado ti. La componente I se puede desconectar poniendo ti a cero. Los valores ymax e ymin limitan la salida tanto hacia arriba como hacia abajo. Si se llega a los valores lmite o si hay limitacin de la seal de salida se indicar mediante las marcas qmax y qmin: qmax = 1 si Y ymax qmin = 1 si Y ymin
Limitacin de magnitudes de posicionado
414
l l
Despus de realizar la adicin de las componentes tiene lugar una limitacin de las magnitudes de posicionado, es decir: ymin Y ymax
33002250
PPI: Regulador PPI en cascada
Reseteado AntiWindup (regulador PI)
Si tiene lugar una limitacin de las magnitudes de posicionado, mediante el reseteado Antiwindup se debe vigilar que la componente integral del regulador de guiado no pueda rebasar todos los lmites. La medida Antiwindup se ejecuta solamente si la componente I del regulador de seguimiento no est desconectada. El reseteado Antiwindup tiene lugar cuando: Y ymax o Y ymin En este caso rige: YI = Y - YP
33002250
415
PPI: Regulador PPI en cascada
Modalidades de servicio
Seleccin de las modalidades de servicio
Existen cuatro modalidades de servicio que se seleccionan mediante los elementos man, halt y fix.
Modalidad de servicio
Automtico Manual Detenido Regulacin de valor fijo
man
0 1 0 0
halt
0 01 1 0
fix
0 0 0 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico se determina la salida de posicionado Y mediante la regulacin en funcin de las magnitudes de regulacin PV, PV2 y las magnitudes de guiado SP, SP2. La salida de posicionado est limitada por ymax e ymin. La conmutacin de Automtico a Manual por lo general no se produce sin brusquedad, debido a que la salida Y puede adoptar cualquier valor entre ymax e ymin, sin embargo, Y adopta en caso de conmutacin directamente el valor YMAN. Pero si la conmutacin debe tener lugar sin brusquedad, existen dos posibilidades, que se aclaran a modo de ejemplo para un regulador PID (vase Conmutacin de Automtico a Manual, p. 315 ) .
Modalidad de servicio Manual
El valor de posicionado manual YMAN se transmite de forma fija al valor de posicionado de salida Y. Pero la salida de posicionado se limita, no obstante, a travs de ymax e ymin. Las magnitudes internas sern guiadas de tal forma, que el regulador pueda conmutar de Manual a Automtico sin brusquedad (con la componente I conectada). En la modalidad de servicio Detenido, la salida de regulacin permanece como se encontraba y el bloque de funcin no modifica la salida de regulacin Y (el regulador permanece detenido), o sea Y = Y(old). La modalidad de servicio Detenido tambin es adecuada, entre otras cosas, para ajustar la salida Y del regulador mediante un mando externo. Las componentes internas se guiarn en el regulador de tal forma que ste contine su marcha sin brusquedad desde su posicin actual. Pero la salida de posicionado se limita, no obstante, a travs de ymax e ymin. En esta modalidad de servicio el valor fijo SP_FIX se transmite de forma fija a la entrada de valor terico del regulador PI (SP2). El regulador PI trabaja en la modalidad de servicio Automtico.
Modalidad de servicio Detenido
Modalidad de servicio Regulacin de valor fijo
416
33002250
PPI: Regulador PPI en cascada
Frmulas detalladas
Explicacin de las magnitudes de las frmulas
Descripcin de las magnitudes de las siguientes frmulas:
Magnitud Significado
Tiempo de exploracin actual Diferencia de regulacin (SP - PV) Diferencia de regulacin (SP2-PV2) Valor de la diferencia de regulacin del ciclo de exploracin anterior Offset en la salida del regulador P Magnitud de posicionado Componente I Componente P
dt ERR err2 ( new ) err2 ( old )
OFF Y YI YP
Salida del regulador de guiado Vista general para el clculo de las componentes de regulacin
La salida del regulador de guiado se determina de la siguiente forma:
Y1 = SP2 = gain1 ERR + OFF
A continuacin encontrar una vista general de los diferentes clculos de las componentes del regulador y de las salidas en funcin de las distintas modalidades de servicio: YI e Y en la modalidad de servicio Automtico YI, Y y SP2 en la modalidad de servicio Manual YI, Y y SP2 en la modalidad de servicio Detenido YI, YP y SP2 en la modalidad de servicio Regulacin de valor fijo
Modalidad de servicio Automtico
33002250
l l l l
La seal de salida Y del regulador en cascada ser:
Y = YP + YI
La componente integral YI del regulador de seguimiento para la modalidad de servicio Automtico se determina de la siguiente manera:
dt err2( new ) + err2 ( old ) YI ( ne w ) = YI ( old ) + gain2 ---- -------------------------------------------------ti 2
La componente I se forma de acuerdo a la regla del trapecio.
417
PPI: Regulador PPI en cascada
Modalidad de servicio Manual
La seal de salida Y del regulador en cascada ser:
Y = YMAN
La seal de entrada SP2 del regulador de seguimiento ser:
SP2 = gain1 ( SP PV ) + OFF
La componente integral YI del regulador de seguimiento para la modalidad de servicio Manual se determina de la siguiente manera:
YI = Y ( SP2 PV2 ) gain2 Modalidad de servicio Detenido
La seal de salida Y del regulador en cascada ser:
Y = Y ( ol d )
La seal de entrada SP2 del regulador de seguimiento ser:
SP2 = gain1 ( SP PV ) + OFF
La componente integral YI del regulador de seguimiento para la modalidad de servicio Detenido se determina de la siguiente manera:
YI = Y ( SP2 PV2 ) gain2 Modalidad de servicio Regulacin de valor fijo
La seal de salida Y del regulador en cascada ser:
Y = YP + YI
La seal de entrada SP2 del regulador de seguimiento ser:
SP2 = SP_FIX
La componente integral YI del regulador de seguimiento para la modalidad de servicio Regulacin de valor fijo se determina de la siguiente manera:
dt err2( new ) + err2 ( old ) YI ( ne w ) = YI ( old ) + gain2 ---- -------------------------------------------------ti 2
La componente proporcional YP se determina de la siguiente manera:
YP = gain2 ( SP2 PV2 )
Error de tiempo de ejecucin
Aviso de error
Se generar un aviso de error si: existe un nmero de coma flotante no vlido en la entrada PV, PV2, YMAN o SP_FIX. ymax es < ymin.
418
l l
33002250
PWM: Modulacin por ancho de pulso
43
Vista general
Introduccin Contenido:
Este captulo describe el bloque PWM. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas Descripcin detallada Ejemplos del bloque PWM
Pgina
420 421 422 423 426
33002250
419
PWM: Modulacin por ancho de pulso
Descripcin breve
Utilizacin del bloque
El mando de los actuadores no slo se realiza mediante magnitudes analgicas, sino tambin a travs de seales de control binarias. La conversin de valores analgicos en seales de salida binarias tiene lugar, por ejemplo, mediante la modulacin por ancho de pulso (PWM) o por la modulacin por duracin de pulso (PDM). Aqu la energa media ajustada del actuador (energa de posicionado) tiene que corresponderse con el valor analgico de entrada (X) del bloque de modulacin.
Descripcin de funcionamiento
El bloque de funcin PWM sirve para transformar los valores analgicos en seales de salida digitales para Concept. En el caso de la modulacin por ancho de pulso (PWM), si el perodo de ciclos es constante se emitir una seal 1 cuya duracin depender del valor analgico. La energa media ajustada se corresponde con el cociente de la duracin de conexin T_on y la frecuencia de ciclo t_period. Para que la energa media ajustada se corresponda tambin con la magnitud de entrada analgica X, tiene que regir lo siguiente:
T_on X
Se pueden proyectar EN y ENO como parmetros adicionales.
Generalidades sobre el accionamiento del actuador
El accionamiento binario del actuador se efecta en general mediante dos seales binarias Y_POS e Y_NEG. Por ejemplo, en el caso de un motor, la salida Y_POS corresponde a la seal "Marcha a la derecha", y la salida Y_NEG a la seal "Marcha a la izquierda". En el caso de un horno, se pueden interpretar las salidas Y_POS e Y_NEG como "Calentar" y "Enfriar". Si el elemento de posicionado es un motor, es posible que en los motores que no tengan autobloqueo haya que enviar un impulso de frenado despus de la seal de conexin, para evitar la marcha en inercia. Para proteger la electrnica de potencia, se debe prever un tiempo de reposo t_pause despus del impulso de conexin t_on y antes del impulso de frenado t_brake, para evitar cortocircuitos.
420
33002250
PWM: Modulacin por ancho de pulso
Representacin
Smbolo
Representacin del bloque
PWM
REAL BOOL Para_PWM
X R PARA
Y_POS Y_NEG
BOOL BOOL
Descripcin de parmetros PWM
Descripcin de parmetros del bloque
Parmetros
X R PARA Y_POS Y_NEG
Tipo de datos
REAL BOOL Para_PWM BOOL BOOL
Significado
Magnitud de entrada Modalidad de servicio Reseteado ("1" = Reset) Parmetros Salida para valores positivos de X Salida para valores negativos de X
Descripcin de parmetros Para_PWM
Descripcin de la estructura de datos
Elemento
t_period t_pause t_brake t_min t_max up_pos up_neg
Tipo de datos
TIME TIME TIME TIME TIME REAL REAL
Significado
Duracin del perodo Tiempo de pausa Tiempo de frenado Tiempo mnimo para el impulso de posicionado Tiempo mximo para el impulso de posicionado Valor lmite superior para valores de X positivos Valor lmite superior para valores de X negativos
33002250
421
PWM: Modulacin por ancho de pulso
Frmulas
Longitud del impulso para Y_POS e Y_NEG
La longitud del impulso T_on para las salidas Y_POS e Y_NEG se determina de acuerdo con las siguientes ecuaciones:
Salida
Y_POS
Frmula X T_on = t_period -----------------u p_po s X T_on = t_period ----------------u p_neg
Condicin
0 X up_pos up_neg X 0
Y_NEG
Reglas para la parametrizacin
Para un funcionamiento correcto se deben tener en cuenta las siguientes reglas en la parametrizacin: ( 2 t_pause + t_brake + t_max ) t_period Los parmetros up_pos y up_neg evalan los valores correspondientes.
422
l l
33002250
PWM: Modulacin por ancho de pulso
Descripcin detallada
Modo de funcionamiento del mdulo
La duracin del perodo determina el tiempo durante el cual se emitirn regularmente, o sea, en un reticulado de tiempo constante, los impulsos de posicionado (seal 1 en la salida Y_POS o Y_NEG). El parmetro t_min indica la duracin mnima de los impulsos, o sea, el tiempo mnimo durante el cual la salida Y_POS o Y_NEG tienen que tener la seal 1. Si la duracin del impulso calculada despus de las ecuaciones en la seccin "Frmulas, p. 422" es menor que t_min, no se emitir ningn impulso para todo el perodo. El parmetro t_max indica la longitud mxima de los impulsos, o sea, el tiempo mximo durante el cual las salidas Y_POS o Y_NEG pueden tener la seal 1. Si el valor de la duracin del impulso calculado mediante la ecuacin indicada ms arriba es mayor que t_max, la duracin del impulso se limitar a t_max. En determinadas circunstancias se deber prever entre los impulsos de accionamiento y de frenado un tiempo de pausa de t_pause = 10 20 ms para proteger la electrnica de potencia (evitar el encendido simultneo de vlvulas rectificadoras conectadas en antiparalelo). El parmetro t_pause indica el tiempo que se debe esperar despus de la seal 1 en la salida Y_POS (Y_NEG) antes de que la salida opuesta Y_NEG (Y_POS) se ajuste con la seal 1 para la duracin t_brake. Se trata aqu de un impulso de frenado que se debe emitir despus del tiempo de pausa. Un tiempo de pausa de t_pause = 20 ms (t_pause = 0.02) corresponde a un bloqueo del control del ngulo de avance de dos semiondas. De esta manera se garantiza una distancia de seguridad lo suficientemente grande como para evitar cortocircuitos o la activacin del circuito de proteccin debido al encendido de las vlvulas en antiparalelo.
33002250
423
PWM: Modulacin por ancho de pulso
Representacin de las relaciones temporales
La siguiente figura muestra la relacin que existe entre los tiempos:
Y_POS
t_pause T_on 1 0 -1 t_min t_brake t_max t_period t
1)
Y_NEG
Tiempo de conexin variable
El parmetro up_pos identifica el punto de la magnitud de entrada X para la cual la salida Y_POS dara siempre la seal 1 con magnitud de entrada X positiva, si: t_pause = t_brake = 0 y t_max = t_period. El parmetro up_neg identifica el punto de la magnitud de entrada X para la cual la salida Y_POS dara siempre la seal 1 con magnitud de entrada X positiva, si: t_pause = t_brake = 0 y t_max = t_period.
424
33002250
PWM: Modulacin por ancho de pulso
Dependencia de la duracin
En la siguiente figura se muestra la dependencia entre la duracin durante la cual la salida Y_POS (Y_NEG) tiene seal 1 y la magnitud de entrada X (aqu tambin se ajusta t_pause = t_brake = 0).
T_on (Y_POS) = f(x) t_max Y_POS
t_min up_neg up_pos t_min X
t_max Y_NEG T_on (Y_NEG) = f(x)
Modalidades de servicio
En la modalidad de servicio Reseteado R = 1 las salidas Y_POS e Y_NEG se ajustan a "0". Los contadores de tiempos internos se normalizan tambin de forma que, al pasar a R = 0, el mdulo de funcin empiece en la salida correspondiente con la emisin de una nueva seal 1. Si se utiliza el mdulo PWM junto con un regulador PID, se debera elegir la duracin del perodo t_period para que corresponda al tiempo de exploracin del regulador PID. De esta manera se garantiza que se pueda procesar por completo cada nueva seal de posicionado del regulador PID dentro de la duracin del perodo. El tiempo de exploracin del PWM se debera elegir en funcin de la resolucin del tiempo de impulso con respecto a la duracin del perodo. Con l se determina el mnimo impulso de posicionado posible. Se recomienda como mnimo la siguiente relacin: t_period/Tiempo de exploracin (PWM) 10
Condiciones lmite
33002250
425
PWM: Modulacin por ancho de pulso
Ejemplos del bloque PWM
Vista general
En los ejemplos se representan las secuencias de seales en las salidas Y_POS e Y_NEG para diferentes valores de la seal de entrada X. Los ejemplos se diferencian segn la parametrizacin elegida. En este apartado encontrar los siguientes ejemplos para el bloque de funcin PWM Respuesta a escaln 1 Respuesta a escaln 2
426
l l
33002250
PWM: Modulacin por ancho de pulso
Respuesta a escaln 1
Para la representacin de la respuesta a escaln 1 se aplican los siguientes parmetros predeterminados:
Parmetros
t_period t_min t_max t_pause t_brake up_pos up_neg
Valor predeterminado
4s 0,2 s 3,8 s 0,1 s 0,2 s 10 10
Diagrama de ciclos de la respuesta a escaln 1
10
5 X 1
-5
-10 1 0 1 0
Y_POS
Secuencia de impulsos de posicionado
Y_NEG
seal analgica
Se puede ver claramente que el tiempo durante el cual la salida Y_POS lleva seal 1 ser mayor cuanto ms aumente la seal de entrada X. Tambin se puede ver que a cada seal Y_POS le sigue una corta seal Y_NEG (salida Y_NEG con seal 1). Esto se debe a la parametrizacin distinta de "0" de t_brake. Si la seal de entrada X es negativa, cuanto ms negativa sea X mayor duracin tendr la seal Y_NEG. Tambin aqu sigue a la seal Y_NEG una corta seal Y_POS como impulso de frenado.
33002250
427
PWM: Modulacin por ancho de pulso
Respuesta a escaln 2
Para la representacin de la respuesta a escaln 2 se aplican los siguientes parmetros predeterminados:
Parmetros
t_period t_min t_max t_pause t_brake up_pos up_neg
Valor predeterminado
4s 0,5 s 4s 0s 0s 10 10
Diagrama de ciclos de la respuesta a escaln 2
10
5 X 1
-5
-10 1 0 1 0 Y_NEG
Y_POS
Secuencia de impulsos de posicionado
seal analgica
La diferencia con el ejemplo "Respuesta a escaln 1" es que aqu no aparecen los impulsos de pausa y de frenado, ya que aqu los parmetros correspondientes se proyectaron como "0". Tambin llama la atencin que cuando la seal de entrada X es muy pequea, ya no se emite ningn impulso. Esto se debe al efecto del tiempo t_min. Adems, si la seal de entrada X es grande (X = up_pos/up_neg), se emitir un impulso continuo. Esto est relacionado con el hecho de que se eligi t_max = t_period.
428
33002250
PWM1: Modulacin por ancho de pulso
44
Vista general
Introduccin Contenido:
Este captulo describe el bloque PWM1. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas Descripcin detallada Ejemplo del bloque PWM1
Pgina
430 431 432 433 435
33002250
429
PWM1: Modulacin por ancho de pulso
Descripcin breve
Utilizacin del bloque
El mando de los actuadores no slo se realiza mediante magnitudes analgicas, sino tambin a travs de seales de control binarias. Aqu la energa media ajustada del actuador (energa de posicionado) tiene que corresponderse con el valor analgico de entrada (IN) del bloque de modulacin.
Descripcin de funcionamiento
El bloque de funcin PWM1 sirve para convertir los valores analgicos en seales de salida digitales para Concept. En el caso de la modulacin por ancho de pulso (PWM1), si el perodo de ciclos es constante se emitir una seal 1 cuya duracin depender del valor analgico. La energa media ajustada se corresponde con el cociente de la duracin de conexin T_on y la frecuencia de ciclo t_period. Para que la energa media ajustada se corresponda tambin con la magnitud de entrada analgica IN, tiene que regir lo siguiente:
T_on IN
Se pueden proyectar EN y ENO como parmetros adicionales.
Generalidades sobre el accionamiento del actuador
En general, el accionamiento binario del actuador se realiza mediante dos seales binarias OUT_POS y OUT_NEG. Por ejemplo, en el caso de un motor, la salida OUT_POS corresponde a la seal "Marcha a la derecha", y la salida OUT_NEG a la seal "Marcha a la izquierda". En el caso de un horno, se pueden interpretar las salidas OUT_POS y OUT_NEG como "Calentar" y "Enfriar".
430
33002250
PWM1: Modulacin por ancho de pulso
Representacin
Smbolo
Representacin del bloque
PWM1
REAL BOOL Para_PWM1
IN RST PARA
OUT_NEG OUT_POS
BOOL BOOL
Descripcin de parmetros PWM1
Descripcin de parmetros del bloque
Parmetros
IN RST PARA OUT_NEG OUT_POS
Tipo de datos
REAL BOOL Para_PWM1 BOOL BOOL
Significado
Magnitud de entrada Modalidad de servicio Reseteado ("1" = Reset) Parmetros Salida para valores negativos de IN Salida para valores positivos de IN
Descripcin de parmetros Para_PWM1
Descripcin de la estructura de datos
Elemento
t_period t_min in_max
Tipo de datos
TIME TIME REAL
Significado
Duracin del perodo Tiempo mnimo para el impulso de posicionado Valor lmite superior para valores de IN positivos/ negativos
33002250
431
PWM1: Modulacin por ancho de pulso
Frmulas
Longitud del impulso para OUT_POS y OUT_NEG
La longitud del impulso T_on para las salidas OUT_POS y OUT_NEG se determina de acuerdo con las siguientes ecuaciones:
Salida
OUT_POS
Frmula
Condicin
IN T_on = t_period -----------------in_max IN T_on = t_period -----------------in_max
0 IN in_max 0 IN in_max
OUT_NEG
Reglas para la parametrizacin
Para un funcionamiento correcto se deben tener en cuenta las siguientes reglas en la parametrizacin: t_min t_period
432
33002250
PWM1: Modulacin por ancho de pulso
Descripcin detallada
Modo de funcionamiento del mdulo
La duracin del perodo determina el tiempo durante el que se emitirn regularmente, o sea, en un reticulado de tiempo constante, los impulsos de posicionado (seal 1 en la salida OUT_POS o en la salida OUT_NEG). El parmetro t_min indica la duracin mnima de los impulsos, o sea, el tiempo mnimo durante el cual la salida Y_POS o Y_NEG tienen que tener la seal 1. Si la duracin del impulso calculada despus de las ecuaciones en la seccin "Frmulas, p. 432" es menor que t_min, no se emitir ningn impulso para todo el perodo.
Representacin de las relaciones temporales
La siguiente figura muestra la relacin que existe entre los tiempos:
OUT_POS
T_on 1 0 -1 t_min
1)
t_period
OUT_NEG
Tiempo de conexin variable
El parmetro in_max identifica el punto de la magnitud de entrada IN para la cual la salida OUT_POS dara siempre la seal 1 con magnitud de entrada IN positiva, si:
33002250
433
PWM1: Modulacin por ancho de pulso
Dependencia de la duracin
En la siguiente figura se muestra la dependencia entre el tiempo durante el cual la salida OUT_POS (OUT_NEG) tiene la seal 1 y la magnitud de entrada IN:
T_on (OUT_POS)=f(in) t_period OUT_POS
t_min -in_max in_max t_min IN
t_period OUT_NEG T_on (OUT_NEG)=f(in)
Modalidades de servicio
En la modalidad de servicio Reseteado RST = 1, las salidas OUT_POS y OUT_NEG se ajustan a "0". Los contadores de tiempos internos se normalizan tambin de forma que, al pasar a RST = 0, el mdulo de funcin empiece en la salida correspondiente con la emisin de una nueva seal 1. Si se utiliza el mdulo PWM1 junto con un regulador PID, se debera elegir la duracin del perodo t_period para que corresponda al tiempo de exploracin del regulador PID. De esta manera se garantiza que se pueda procesar por completo cada nueva seal de posicionado del regulador PID dentro de la duracin del perodo. El tiempo de exploracin del PWM1 se debera elegir en funcin de la resolucin del tiempo de impulso con respecto a la duracin del perodo. Con l se determina el mnimo impulso de posicionado posible. Se recomienda como mnimo la siguiente relacin: t_period/Tiempo de exploracin (PWM1) 10
Condiciones lmite
434
33002250
PWM1: Modulacin por ancho de pulso
Ejemplo del bloque PWM1
Respuesta a escaln
En el ejemplo se representan las secuencias de seales en las salidas OUT_POS y OUT_NEG para diferentes valores de la seal de entrada IN. Para la representacin de la respuesta a escaln se aplican los siguientes parmetros predeterminados:
Parmetros
t_period t_min in_max
Valor predeterminado
4s 0,5 s 10
Diagrama de ciclos de la respuesta a escaln
10
IN
1
-5
-10 1 0 1 0
OUT_POS
Secuencia de impulsos de posicionado
OUT_NEG
IN Seal analgica
Aqu se aprecia que si la seal de entrada IN es muy pequea, no se emite ningn impulso. Esto se debe al efecto del tiempo t_min. En el caso de una seal de entrada IN (IN = in_max) grande, se emitir un impulso continuo.
33002250
435
PWM1: Modulacin por ancho de pulso
436
33002250
QDTIME: Unidad de tiempo muerto
45
Vista general
Introduccin Contenido:
Este captulo describe el bloque QDTIME. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada
Pgina
438 439 440
33002250
437
QDTIME: Unidad de tiempo muerto
Descripcin breve
Descripcin de funcionamiento
Con este bloque de funcin se retarda una seal de entrada por un tiempo muerto. El bloque de funcin retarda la seal IN durante el tiempo muerto T_DELAY antes de ser devuelta a OUT. Este bloque de funcin tiene un bfer de retardo para 128 elementos (valores de IN), o sea, durante el tiempo T_DELAY se pueden almacenar 128 valores de IN. El bfer se tratar segn las diferentes modalidades de servicio. El valor de OUT no se modificar despus de un arranque del sistema en fro o en caliente. Los valores internos se ajustan al valor de IN. Despus de un arranque en fro o en caliente del sistema o despus de una modificacin del tiempo muerto T_DELAY, READY ser igual a "0". Esto significa: sin preparar, bfer vaco. El bloque de funcin tiene las modalidades de servicio Tracking y Automtico. Se pueden proyectar EN y ENO como parmetros adicionales.
438
33002250
QDTIME: Unidad de tiempo muerto
Representacin
Smbolo
Representacin del bloque
QDTIME
REAL TIME REAL BOOL
IN T_DEALY TR_I TR_S
OUT
REAL
READY
BOOL
Descripcin de parmetros
Descripcin de parmetros del bloque
Parmetros
IN T_DELAY TR_I TR_S
Tipo de datos
REAL TIME REAL BOOL
Significado
Valor de entrada Tiempo muerto Entrada de inicializacin Tipo de inicializacin: "1" = Modalidad de servicio Tracking "0" = Modalidad de servicio Automtico Salida "1" = Bfer interno lleno "0" = Bfer interno no lleno (p. ej., despus de un arranque en caliente/fro o modificacin del tiempo muerto)
OUT READY
REAL BOOL
33002250
439
QDTIME: Unidad de tiempo muerto
Descripcin detallada
Seleccin de las modalidades de servicio
Existen dos modalidades de servicio, que se seleccionan a travs de la entrada TR_S:
Modalidad de servicio
Automtico Tracking
TR_S
0 1
Modalidad de servicio Automtico
En la modalidad de servicio Automtico el bloque de funcin opera segn las siguientes reglas:
Si ...
Tiempo de ciclo > T_DELAY/128
Entonces ...
el actual valor de IN se transmitir al bfer, y el anterior valor de IN del bfer se enviar a la salida OUT. En este caso, la resolucin es menor que 128 y se produce un error sistemtico, es decir, que algunos valores IN se guardan por duplicado (vase tambin Ejemplo). no se podrn depositar todos los valores IN en el bfer. En este caso no se guardar el valor de IN en algunos ciclos, y OUT permanecer sin variacin durante esos ciclos.
Tiempo de ciclo < T_DELAY/128
Ejemplo de tiempo de ciclo > 128
Supongamos los siguientes valores: Tiempo de ciclo = 100 ms T_DELAY = 10 s tin = T_DELAY / 128 = 78 ms Debido a que tin (tiempo de lectura) es menor que el tiempo de ciclo, todos los valores IN se aceptarn en el bfer. Pero en la cuarta ejecucin del bloque de funcin (despus de 400 ms) el valor de IN se guardar dos veces en vez de una (porque 3 x 78 = 312 y 4 x 78 = 390).
Modalidad de servicio Tracking
En la modalidad de servicio Tracking, el valor de tracking TR_I se transfiere de forma fija a la salida OUT. El bfer interno se rellena con el valor de tracking TR_I. El bfer se marcar como lleno (READY = 1).
440
33002250
QDTIME: Unidad de tiempo muerto
Ejemplo del comportamiento de QDTIME
El diagrama muestra un ejemplo del comportamiento del bloque de funcin. La entrada IN se modifica en forma de rampa desde un valor a otro nuevo, y la salida OUT sigue a la entrada IN con un retardo del tiempo muerto T_DELAY. Diagrama del bloque de funcin QDTIME
OUT
IN
T_DELAY
33002250
441
QDTIME: Unidad de tiempo muerto
442
33002250
QPWM: Modulacin por ancho de pulso (simple)
46
Vista general
Introduccin Contenido:
Este captulo describe el bloque QPWM. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas Descripcin detallada Ejemplo del bloque QPWM
Pgina
444 445 446 447 449
33002250
443
QPWM: Modulacin por ancho de pulso (simple)
Descripcin breve
Utilizacin del bloque
El mando de los actuadores no slo se realiza mediante magnitudes analgicas, sino tambin a travs de seales de control binarias. La conversin de valores analgicos en seales de salida binarias tiene lugar, por ejemplo, mediante la modulacin por ancho de pulso (QPWM) o por la modulacin por duracin de pulso (PDM). Aqu la energa media ajustada del actuador (energa de posicionado) tiene que corresponderse con el valor analgico de entrada (X) del bloque de modulacin.
Descripcin de funcionamiento
El bloque de funcin QPWM sirve para transformar los valores analgicos en seales de salida digitales. En el caso de la modulacin por ancho de pulso (QPWM), si el perodo de ciclos es constante se emitir una seal 1 cuya duracin depender del valor analgico. La energa media ajustada se corresponde con el cociente de la duracin de conexin T_on y la frecuencia de ciclo t_period. Para que la energa media ajustada se corresponda tambin con la magnitud de entrada analgica X, tiene que regir lo siguiente:
T_on X
Se pueden proyectar EN y ENO como parmetros adicionales.
Generalidades sobre el accionamiento del actuador
El accionamiento binario del actuador se efecta en general mediante dos seales binarias Y_POS e Y_NEG. Por ejemplo, en el caso de un motor, la salida Y_POS corresponde a la seal "Marcha a la derecha", y la salida Y_NEG a la seal "Marcha a la izquierda". En el caso de un horno, se pueden interpretar las salidas Y_POS e Y_NEG como "Calentar" y "Enfriar".
444
33002250
QPWM: Modulacin por ancho de pulso (simple)
Representacin
Smbolo
Representacin del bloque
QPWM
REAL BOOL Para_QPWM
X R PARA
Y_POS Y_NEG
BOOL BOOL
Descripcin de parmetros QPWM
Descripcin de parmetros del bloque
Parmetros
X R PARA Y_POS Y_NEG
Tipo de datos
REAL BOOL Para_QPWM BOOL BOOL
Significado
Magnitud de entrada Modalidad de servicio Reseteado ("1" = Reset) Parmetros Salida para valores positivos de X Salida para valores negativos de X
Descripcin de parmetros Para_QPWM
Descripcin de la estructura de datos
Elemento
t_period t_min x_max
Tipo de datos
TIME TIME REAL
Significado
Duracin del perodo Tiempo mnimo para el impulso de posicionado Valor lmite superior para valores de X positivos/ negativos
33002250
445
QPWM: Modulacin por ancho de pulso (simple)
Frmulas
Longitud del impulso para Y_POS e Y_NEG
La longitud del impulso T_on para las salidas Y_POS e Y_NEG se determina de acuerdo con las siguientes ecuaciones:
Salida
Y_POS
Frmula
Condicin
X T_on = t_period --------------x_max X T_on = t_period --------------x_max
0 X x_max 0 X x_max
Y_NEG
Reglas para la parametrizacin
Para un funcionamiento correcto se deben tener en cuenta las siguientes reglas en la parametrizacin: t_min t_period
446
33002250
QPWM: Modulacin por ancho de pulso (simple)
Descripcin detallada
Modo de funcionamiento del mdulo
La duracin del perodo determina el tiempo durante el cual se emitirn regularmente, o sea, en un reticulado de tiempo constante, los impulsos de posicionado (seal 1 en la salida Y_POS o Y_NEG). El parmetro t_min indica la duracin mnima de los impulsos, o sea, el tiempo mnimo durante el cual la salida Y_POS o Y_NEG tienen que tener la seal 1. Si la duracin del impulso calculada despus de las ecuaciones en la seccin "Frmulas, p. 446" es menor que t_min, no se emitir ningn impulso para todo el perodo.
Representacin de las relaciones temporales
La siguiente figura muestra la relacin que existe entre los tiempos:
Y_POS
T_on 1 0 -1 t_min
1)
t_period
Y_NEG
Tiempo de conexin variable
El parmetro x_max identifica el punto de la magnitud de entrada X para la cual la salida Y_POS dara siempre la seal 1 con magnitud de entrada X positiva:
33002250
447
QPWM: Modulacin por ancho de pulso (simple)
Dependencia de la duracin
En la siguiente figura se muestra la dependencia entre el tiempo durante el cual la salida Y_POS (Y_NEG) tiene la seal 1 y la magnitud de entrada X:
T_on (Y_POS) = f(x) t_period Y_POS
t_min -x_max x_max t_min X
t_period Y_NEG T_on (Y_NEG) = f(x)
Modalidades de servicio
En la modalidad de servicio Reseteado R = 1 las salidas Y_POS e Y_NEG se ajustan a "0". Los contadores de tiempos internos se normalizan tambin de forma que, al pasar a R = 0, el mdulo de funcin empiece en la salida correspondiente con la emisin de una nueva seal 1. Si se utiliza el mdulo QPWM junto con un regulador PID, se debera elegir la duracin del perodo t_period de tal forma que se corresponda con el tiempo de exploracin del regulador PID. De esta manera se garantiza que se pueda procesar por completo cada nueva seal de posicionado del regulador PID dentro de la duracin del perodo. El tiempo de exploracin de QPWM se debera elegir en funcin de la resolucin del tiempo de impulso con respecto a la duracin del perodo. Con l se determina el mnimo impulso de posicionado posible. Se recomienda como mnimo la siguiente relacin: t_period/Tiempo de exploracin (QPWM) 10
Condiciones lmite
448
33002250
QPWM: Modulacin por ancho de pulso (simple)
Ejemplo del bloque QPWM
Respuesta a escaln
En el ejemplo se representan las secuencias de seales en las salidas Y_POS e Y_NEG para diferentes valores de la seal de entrada X. Para la representacin de la respuesta a escaln se aplican los siguientes parmetros predeterminados:
Parmetros
t_period t_min x_max
Valor predeterminado
4s 0,5 s 10
Diagrama de ciclos de la respuesta a escaln
10
X
1
-5
-10 1 0 1 0
Y_POS
Secuencia de impulsos de posicionado
Y_NEG
Seal analgica
Aqu se aprecia que si la seal de entrada X es muy pequea, no se emitirn ms impulsos. Esto se debe al efecto del tiempo t_min. En el caso de una seal de entrada X (X = x_max) grande, se emitir un impulso continuo.
33002250
449
QPWM: Modulacin por ancho de pulso (simple)
450
33002250
RAMP: Generador de rampas
47
Vista general
Introduccin Contenido:
Este captulo describe el bloque MS. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
452 452 453 455
33002250
451
RAMP: Generador de rampas
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin RAMP permite pasar en forma de rampa de un valor inicial terico a un valor de destino. Las pendientes de las rampas positiva y negativa pueden ser diferentes. Una visualizacin (salida DONE) informa al usuario de si ya se ha alcanzado el valor de destino o si an se est ejecutando la rampa. Se pueden proyectar EN y ENO como parmetros adicionales.
Representacin
Smbolo
Representacin del bloque
RAMP
REAL Para_RAMP REAL BOOL
RSP PARA TR_I TR_S
SP DONE STATUS
REAL BOOL WORD
Descripcin de parmetros RAMP
Descripcin de parmetros del bloque
Parmetros
RSP PARA TR_I TR_S SP DONE STATUS
Tipo de datos
REAL Para_RAMP REAL BOOL REAL BOOL WORD
Significado
Valor de destino de la rampa Parmetros Valor inicial de la rampa Comando de inicializacin de la rampa Salida "1": se ha alcanzado el valor de destino "0": la funcin de rampa se est ejecutando Palabra de estado
Descripcin de parmetros Para_RAMP
Descripcin de la estructura de datos
Elemento
inc_rate dec_rate
Tipo de datos
REAL REAL
Significado
Pendiente positiva en unidades por segundo ( 0) Pendiente negativa en unidades por segundo ( 0)
452
33002250
RAMP: Generador de rampas
Descripcin detallada
Parametrizacin
Si el valor predeterminado en la entrada (RSP) supera el valor actual de la salida SP, el bloque de funcin aumentar el valor de esta salida con la velocidad inc_rate hasta que el valor SP alcance al valor RSP. Si inc_rate es cero, no se ejecutar la funcin de rampa y SP ser la copia directa de RSP. Si el valor predeterminado en la entrada no alcanza el valor de SP, el bloque de funcin reducir el valor de SP con la velocidad dec_rate. Si dec_rate es cero, no se ejecutar la funcin de rampa y SP ser la copia directa de RSP. Si se modifica el valor de RSP durante la generacin de la rampa, el bloque de funcin intentar alcanzar inmediatamente este nuevo valor de destino. La funcin de rampa que se est ejecutando en ese momento continuar o cambiar de direccin.
Modalidades de servicio
El modo de servicio Tracking (TR_S = 1) permite asignar un valor inicial a la salida SP. Proceda de la siguiente forma:
Paso
1 2
Accin
Ponga TR_I al valor inicial deseado. Ponga TR_S a 1, en este caso la entrada TR_I se copiar continuadamente a SP. Nota: En la modalidad de servicio Tracking (TR_S = 1), la salida DONE permanece a cero. Si se pone TR_S a 0, el bloque de funcin recuperar su funcionamiento normal. SP se acerca continuadamente a RSP, por lo que el valor describe una rampa.
Visualizacin de DONE
La salida DONE pasa a 1 justo en el momento en el que se finaliza una funcin de rampa. Se volver a poner a cero cuando empiece una nueva rampa o el bloque de funcin pase a la modalidad de servicio Tracking.
33002250
453
RAMP: Generador de rampas
Diagrama de ciclos
Diagrama de ciclos del bloque RAMP
1
RSP SP 0
DONE 0
TR_S 0
1 2 3
Inicializacin SP = TR_I Rampa ascendente = inc_rate Rampa descendente = dec_rate
454
33002250
RAMP: Generador de rampas
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante Una de las siguientes magnitudes es negativa: inc_rate, dec_rate. Para el clculo, el bloque de funcin utiliza el valor 0.
Aviso de error
Aparecer un mensaje de error si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. En este caso las salidas SP y DONE permanecern sin variacin. En los siguientes casos aparecer una advertencia: El parmetro inc_rate es negativo: el bloque de funcin utilizar el valor 0 en lugar del valor del parmetro errneo de inc_rate. El parmetro dec_rate es negativo: el bloque de funcin utilizar el valor 0 en lugar del valor del parmetro errneo de dec_rate.
Advertencia
33002250
l l
455
RAMP: Generador de rampas
456
33002250
RATIO: Regulador proporcional
48
Vista general
Introduccin Contenido:
Este captulo describe el bloque RATIO. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
458 459 460 462
33002250
457
RATIO: Regulador proporcional
Descripcin breve
Descripcin de funcionamiento
Si est conectado a un regulador, el bloque de funcin RATIO efecta una regulacin proporcional. La finalidad de una regulacin proporcional es establecer una relacin entre el valor real PV (magnitud de regulacin) y otro valor real PV_TRACK (magnitud de guiado). La misin del bloque de funcin consiste en calcular el valor terico del regulador de acuerdo con la magnitud de control. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin tiene las siguientes propiedades: La proporcin se puede controlar interna (K) o externamente (RK) Valor lmite inferior y superior para K o RK Valor lmite superior e inferior para el valor terico SP calculado Clculo de la proporcin real: KACT = (PV - bias) / PV_TRACK
Frmula
458
l l l l
Clculo del valor terico del regulador
SP = K PV_TRACK + bias
33002250
RATIO: Regulador proporcional
Representacin
Smbolo
Representacin del bloque
RATIO
REAL REAL REAL BOOL REAL Para_RATIO
PV PV_TRACK RK K_RK K PARA
KACT SP STATUS
REAL REAL WORD
Descripcin de parmetros RATIO
Descripcin de parmetros del bloque
Parmetros
PV PV_TRACK RK K_RK
Tipo de datos
REAL REAL REAL BOOL
Significado
Valor real regulado por el circuito de regulacin (slo se utiliza para el clculo de KACT) Magnitud de guiado del circuito de regulacin Coeficiente proporcional externo Tipo de coeficiente para la proporcin utilizada "1": Proporcin externa RK "0": Proporcin interna K Coeficiente para la proporcin interna Parmetros Coeficiente para la proporcin real Salida calculada Palabra de estado
K PARA KACT SP STATUS
REAL Para_RATIO REAL REAL WORD
Descripcin de parmetros Para_RATIO
Descripcin de la estructura de datos
Elemento
k_min k_max sp_min sp_max bias
Tipo de datos
REAL REAL REAL REAL REAL
Significado
Valor lmite inferior en la proporcin K o RK Valor lmite superior en la proporcin K o RK Valor lmite inferior de la salida calculada SP Valor lmite superior de la salida calculada SP Coeficiente de offset
33002250
459
RATIO: Regulador proporcional
Descripcin detallada
Diagrama de estructura
Diagrama de estructura del bloque RATIO
K K_ RK
k_max bias k_min X + sp_max SP + sp_min
RK
PV_TRACK
460
33002250
RATIO: Regulador proporcional
Aplicacin
El bloque de funcin RATIO est antepuesto a un regulador proporcional. Su misin es calcular el valor terico externo SP de un regulador conectado detrs. El regulador proporcional deber estar compuesto por los bloques de funcin RATIO, SP_SEL y un regulador. De forma tpica, este tipo de regulador se utiliza para regular un caudal en relacin con otro caudal medido, para lo cual deber mantener una determinada proporcin K entre las dos magnitudes. Representacin del regulador proporcional
PV OUTP
SP_FC14 (1)
RATIO
PV_FC14 PV_FC15 REMOTE_K REMOTE_LOCAL LOCAL_K PARA_SP_FC14
PV PV_TRACK RK K_RK K PARA
KACT SP STATUS
FC14 (2)
PIDFF
PV_FC14
MAN_AUTO_FC14 PARA_FC14
PV SP FF RCPY MAN_AUTO PARA TR_I TR_S
OUT OUTD
OUT_FC14
MA_O INFO STATUS
33002250
461
RATIO: Regulador proporcional
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1 Bit 5 = 1 Bit 6 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante La entrada K (o RK) est fuera del rango [k_min, k_max]: Para el clculo, el bloque de funcin utiliza los valores k_min o k_max. La salida SP ha alcanzado el valor lmite inferior sp_min: SP se limita a sp_min La salida SP ha alcanzado el valor lmite superior sp_max: SP se limita a sp_max
Aviso de error
Aparecer este error si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. Las salidas KACT y SP no varan.
462
33002250
SCALING: Escalado
49
Vista general
Introduccin Contenido:
Este captulo describe el bloque SCALING. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Parametrizacin Error de tiempo de ejecucin
Pgina
464 464 465 466
33002250
463
SCALING: Escalado
Descripcin breve
Descripcin de funcionamiento Frmula
Este bloque de funcin permite cambiar el tamao de una magnitud numrica. Se pueden proyectar EN y ENO como parmetros adicionales. El bloque de funcin realiza el siguiente clculo:
( out_max out_min ) OUT = ( IN in_min ) ------------------------------------------------------- + out_min ( in_max in_min )
Representacin
Smbolo
Representacin del bloque
SCALING
REAL Para-SCALING
IN PARA
OUT STATUS
REAL WORD
Descripcin de parmetros SCALING
Descripcin de parmetros del bloque
Parmetros
IN PARA OUT STATUS
Tipo de datos
REAL Para_SCALING REAL WORD
Significado
Magnitud numrica que se desea escalar Parmetros Valor de salida escalado Palabra de estado
Descripcin de parmetros Para_SCALING
Descripcin de la estructura de datos
Elemento
in_min in_max out_min out_max clip
Tipo de datos
REAL REAL REAL REAL BOOL
Significado
Valor lmite inferior de la escala de entrada Valor lmite superior de la escala de entrada Valor lmite inferior de la escala de salida Valor lmite superior de la escala de salida "1": el valor de la salida OUT est limitado entre out_min y out_max.
464
33002250
SCALING: Escalado
Parametrizacin
Sin limitacin de salida (clip = 0)
Si el parmetro Clip est ajustado a 0, el escalado ser independiente del valor de la entrada IN.
out_max OUT out_min 0 in_min IN in_max IN
Con limitacin de salida (clip = 1)
Si el parmetro Clip est ajustado a 1, el escalado se realizar dentro del rango [in_min , in_max]. Fuera de este rango, la salida se limitar a los valores out_min y out_max.
out_max OUT out_min 0 in_min IN in_max IN
Cambio del sentido de variacin
Tambin es posible cambiar el sentido de variacin de la magnitud numrica de entrada asignando a out_max un valor menor que el de out_min.
out_min OUT out_max 0 in_min IN in_max IN
33002250
465
SCALING: Escalado
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante El parmetro Clip est ajustado a 1 y la entrada IN est fuera del rango [in_min, in_max]: el bloque de funcin necesita para el clculo el valor in_min o in_max. El parmetro in_min es igual que in_max
Bit 7 = 1
Aviso de error
En los siguientes casos se generar un mensaje de error: En una entrada se registra un valor no flotante. En el clculo con valores con coma flotante surge un problema. Si in_min = in_max
466
l l l
En estos casos, la salida OUT no cambiar.
33002250
SCON3: Regulador de tres puntos de a pasos
50
Vista general
Introduccin Contenido:
Este captulo describe el bloque SCON3. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
468 469 470 472
33002250
467
SCON3: Regulador de tres puntos de a pasos
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin reproduce un regulador paso a paso de tres puntos que, mediante una realimentacin dinmica, recibe un comportamiento similar a un PID. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin SCON3 dispone de las siguientes propiedades: Modalidades de servicio Reseteado, Automtico Una realimentacin interna (retardador de primer orden)
468
l l
33002250
SCON3: Regulador de tres puntos de a pasos
Representacin
Smbolo
Representacin del bloque
SCON3
REAL REAL Para_SCON3 BOOL
SP PV PARA R
Y_POS Y_NEG ERR_EFF
BOOL BOOL REAL
Descripcin de parmetros SCON3
Descripcin de los parmetros del bloque
Parmetros
SP PV PARA R ERR_EFF Y_POS Y_NEG
Tipo de datos
REAL REAL Para_SCON3 BOOL REAL BOOL BOOL
Significado
Entrada de valor terico Entrada de valor real Parmetros "1" = Modalidad de servicio Reseteado Valor efectivo de conmutacin "1" = magnitud de posicionado positiva en la salida ERR_EFF "1" = magnitud de posicionado negativa en la salida ERR_EFF
Descripcin de parmetros Para_SCON3
Descripcin de la estructura de datos
Elemento
gain ti t_proc hys db
Tipo de datos
REAL TIME TIME REAL REAL
Significado
Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Tiempo nominal de posicionado de la vlvula conectada Histresis del conmutador de tres puntos Zona de insensibilidad
33002250
469
SCON3: Regulador de tres puntos de a pasos
Descripcin detallada
Estructura del regulador
Estructura del regulador de tres puntos:
Y ERR_EFF SP
+ + -
Y_POS
Y_NEG
PV
Xr
K G ( s ) = --------------------1 + ti s
Dependencia entre las salidas Y_POS e Y_NEG y la magnitud Y:
Si ...
Y=1 Y=0 Y = -1
Entonces ...
Y_POS = 1 Y_NEG = 0 Y_POS = 0 Y_NEG = 0 Y_POS = 0 Y_NEG = 1
Significado de la magnitud K: ti K = ---------------------------------t_proc gain
470
33002250
SCON3: Regulador de tres puntos de a pasos
Principio del regulador de tres puntos
Al regulador de tres puntos propiamente dicho se le aade una realimentacin dinmica (unidad PT1). Mediante la eleccin apropiada de las constantes de tiempo ti y t_proc de estas unidades de realimentacin, el regulador de tres puntos tiene un comportamiento dinmico que corresponde al de un regulador PD.
Y_POS hys ERR_EFF SP
+ + -
db
Y_POS
1 0
PV hys Xr
-1
db
ERR_EFF
Y_NEG
Y_NEG
Se debe elegir la amplificacin gain mayor que 0.
Zona de insensibilidad
El parmetro db establece el punto de conmutacin para las salidas Y_POS e Y_NEG. Si el valor de conmutacin efectivo ERR_EFF = SP - PV- XR es positivo y se hace mayor que db, la salida Y_POS conmutar de "0" a "1". Si el valor de conmutacin efectivo ERR_EFF es negativo y se hace menor que -db, la salida Y_NEG conmutar de "0" a "1". El valor del parmetro db se ajusta normalmente al 1% del rango de regulacin mximo (mx. (SP - PV)).
Nota: Mediante la zona de insensibilidad db se evala el valor.
Histresis
El parmetro hys indica la histresis de conmutacin, o sea, el valor en que se debe disminuir el valor de conmutacin efectivo ERR_EFF, partiendo del punto de conmutacin db, antes de que la salida Y_POS (Y_NEG) se ponga de nuevo a "0". La relacin entre Y_POS e Y_NEG que depende del valor de conmutacin efectivo ERR_EFF y los parmetros db e hys se explica en la figura Principio del regulador de tres puntos, p. 471. El valor del parmetro hys se ajusta normalmente al 0.5 % del rango de regulacin mximo (mx. (SP - PV)).
Nota: Mediante la histresis hys se evala el valor.
33002250
471
SCON3: Regulador de tres puntos de a pasos
Comportamiento en el caso de constante de tiempo errnea
Si la constante de tiempo ti = 0 o la amplificacin gain 0 (error en la proyeccin), el bloque se procesar a pesar de todo. No obstante, la funcin de la realimentacin se desconectar para que el bloque funcione como un conmutador de tres puntos normal. Si la constante de tiempo t_proc = 0 (error en la proyeccin), el bloque se procesar de todas formas. En este caso, se ajustar para t_proc un valor predeterminado de t_proc = 60 s (60 000 ms).
Modalidades de servicio
Existen dos modalidades de servicio que se eligen a travs de la entrada R.
Modalidad de servicio
Automtico Reset
R
0 1
Significado
El bloque de funcin se procesar tal y como se ha descrito anteriormente. El valor interno de la unidad de realimentacin se ajustar a SP - PV. Las salidas Y_POS e Y_NEG se pondrn a "0".
Error de tiempo de ejecucin
Aviso de error Advertencia
Si hys > 2 * db se genera un mensaje de error. En los siguientes casos aparecer una advertencia: gain 0 : El regulador funciona sin realimentacin. ti = 0: El regulador funciona sin realimentacin. t_proc = 0: El regulador funciona con un valor predeterminado de t_proc = 60 s.
472
l l l
33002250
SERVO: Control para servomotores elctricos
51
Vista general
Introduccin Contenido:
Este captulo describe el bloque SERVO. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Parametrizacin Algoritmos para el bloque de funcin SERVO Modalidades de servicio Ejemplos del bloque de funcin SERVO Error de tiempo de ejecucin
Pgina
474 474 476 478 479 480 487
33002250
473
SERVO: Control para servomotores elctricos
Descripcin breve
Descripcin de funcionamiento
Este bloque de funcin permite efectuar una regulacin PID en los servomotores elctricos con o sin sensado de posicin. Se conecta detrs del regulador (PIDFF, PI_B) y convierte su salida digital en las dos salidas lgicas RAISE y LOWER. Si el bloque de funcin utiliza el sensado de posicin, se efectuar una regulacin de la posicin del actuador. Si no se utiliza el sensado de posicin, el regulador el bloque de funcin SERVO efectuarn conjuntamente una regulacin continuada (no esttica). Se pueden proyectar EN y ENO como parmetros adicionales.
Representacin
Smbolo
Representacin del bloque
SERVO
BOOL REAL REAL BOOL REAL BOOL BOOL BOOL Para_SERVO
SEN IN INPD MA_I RCPY RST R_STOP L_STOP PARA
RAISE LOWER STATUS
BOOL BOOL WORD
474
33002250
SERVO: Control para servomotores elctricos
Descripcin de parmetros SERVO
Descripcin de los parmetros del bloque
Parmetros
SEN
Tipo de datos
BOOL
Significado
"1" : Inclusin de un nuevo valor en las entradas INPD o IN "0" : No hay inclusin de los nuevos valores de INPD o IN Salida de regulador OUT (de 0 a 100%) Modificacin de la salida OUTD del regulador (de 100% a 100%) Modalidad de servicio del regulador (salida MA_O) "1" : Modalidad de servicio Automtico "0" : Servicio Manual o Tracking Sensado de posicin (de 0 a 100%) "1" : Reinicializacin del bloque de funcin (puesta a cero de las salidas y del estado interno del bloque) Posicin final RAISE alcanzada Posicin final LOWER alcanzada Parmetros Salida lgica en el sentido de marcha RAISE Salida lgica en el sentido de marcha LOWER Palabra de estado
IN INPD MA_I
REAL REAL BOOL
RCPY RST
REAL BOOL
R_STOP L_STOP PARA RAISE LOWER STATUS
BOOL BOOL Para_SERVO BOOL BOOL WORD
Descripcin de los parmetros Para_SERVO
Descripcin de la estructura de datos
Elemento
en_rcpy rcpy_rev t_motor t_mini
Tipo de datos
BOOL BOOL TIME TIME
Significado
"1" : Funcin con sensado de posicin (teniendo en cuenta RCPY) "1" : Inversin de RCPY "0" : Sin inversin de RCPY Tiempo de apertura del actuador Duracin mnima del impulso
33002250
475
SERVO: Control para servomotores elctricos
Parametrizacin
Vista general de la parametrizacin
A continuacin se explican los siguientes modos de funcionamiento del bloque de funcin: Con sensado de posicin (en_rcpy = 1), p. 476 Sin sensado de posicin (en_rcpy = 0), p. 476 Tiempo de apertura del actuador (t_motor), p. 476 Duracin mnima del impulso (t_mini), p. 476 Exploracin / Parmetro SEN, p. 477 Deteccin de la posicin final, p. 477
Con sensado de posicin (en_rcpy = 1)
Sin sensado de posicin (en_rcpy = 0)
Tiempo de apertura del actuador (t_motor) Duracin mnima del impulso (t_mini)
476
l l l l l l
Si se utiliza el sensado de posicin RCPY (en_rcpy = 1), deber conectarse la entrada IN a la salida de valor absoluto OUT de un regulador (rango de regulacin de 0 a 100%). Para cada nuevo valor de la salida OUT generada por el regulador, el bloque de funcin SERVO genera una salida discreta RAISE o LOWER, cuya duracin ser proporcional a la variacin IN - RCPY. Para garantizar un funcionamiento correcto del bloque de funcin, la entrada MA_I deber estar conectada a la salida MA_O. El valor de la entrada RCPY puede corresponder a un porcentaje de apertura (con rcpy_rev = 0) o a un porcentaje de cierre (poner rcpy_rev a 1). Si no se establece sensado de posicin (en_rcpy = 0), la entrada INPD deber conectarse a la modificacin de salida OUTD de un regulador (rango de regulacin de -100 a 100%). Para cada nuevo valor OUTD generado por el regulador, el bloque de funcin SERVO genera una salida discreta RAISE o LOWER, cuya duracin es proporcional a la modificacin de salida del regulador INPD. En este caso, la entrada MA_I deber conectarse obligatoriamente a la salida MA_O del mismo regulador, ya que el algoritmo puede variar ligeramente dependiendo de la modalidad de servicio (vase seccin "Algoritmos para el bloque de funcin SERVO, p. 478"). El parmetro t_motor permite al bloque de funcin ajustarse a los distintos servomotores. La duracin del impulso que se aplique a RAISE o LOWER deber ser proporcional al tiempo de apertura del actuador para el rango de regulacin completo. Con el parmetro t_mini se puede evitar que se generen impulsos demasiado cortos que puedan daar el actuador. Si la duracin calculada para los impulsos que se deben aplicar a RAISE o LOWER est por debajo de t_mini, el bloque de funcin no generar ningn impulso. Cada impulso ya comenzado dura al menos t_mini.
33002250
SERVO: Control para servomotores elctricos
Exploracin / Parmetro SEN
En la modalidad de servicio Automtico, la resolucin de la regulacin efectuada por el bloque de funcin SERVO se expresa mediante la relacin (perodo de exploracin del circuito de regulacin/perodos de ejecucin del bloque de funcin SERVO). El regulador tambin deber explorarse antes que el bloque de funcin SERVO (mediante un bloque de funcin SAMPLETM), pero el bloque de funcin SERVO deber ejecutarse en cada ciclo. En el caso contrario (si el bloque de regulador se ejecuta con el mismo ritmo que el bloque SERVO) se ejecutar una regulacin de dos puntos inexacta que someter a un gran esfuerzo al actuador. La entrada SEN del bloque de funcin SERVO le indica si el bloque de regulacin PID se ejecut en el ciclo en curso o no. La entrada SEN permite, por tanto, determinar si el regulador ha generado o no una nueva salida, de forma que no se considere la misma salida varias veces:
SEN =
1 0
Significado
Inclusin de un nuevo valor Sin inclusin de un nuevo valor
Si el regulador se explora con el bloque de funcin SAMPLETM, lo que es el caso habitual, bastar con conectar la entrada SEN del bloque SERVO a la salida SAMPLETM (vase seccin "Ejemplos del bloque de funcin SERVO, p. 480").
Deteccin de la posicin final
Si se ha registrado una posicin final (R_STOP = 1 o L_STOP = 1), la salida correspondiente (RAISE o LOWER) se forzar a 0.
33002250
477
SERVO: Control para servomotores elctricos
Algoritmos para el bloque de funcin SERVO
Algoritmo sin sensado de posicin
En este caso permite al bloque de funcin SERVO aplicado al regulador una regulacin estadstica. El algoritmo no utiliza la salida de valor absoluto OUT del regulador, sino la modificacin de la salida OUTD. La salida RAISE (o LOWER, segn el signo de la modificacin) se pondr a 1 durante un tiempo determinado. Este tiempo es proporcional al tiempo de apertura de la vlvula (t_motor) y al valor de modificacin OUTD. La duracin de los impulsos de salida (T_IMP) se calcula de acuerdo al siguiente principio:
T_IMP = OUTD (% ).t_motor
En adelante, para T_IMP (la duracin del impulso que de salida) regir lo siguiente:
Si ...
T_IMP < t_mini
Entonces ...
el bloque no genera impulso, sino que almacena el valor para el siguiente clculo. Esto permite el procesamiento correcto de las aplicaciones de regulacin, en las cuales las modificaciones de salida son dbiles pero continuas. Para evitar generar impulsos demasiado cortos, los impulsos de salida estn limitados a una duracin mnima t_mini. T_IMP es continuo, se calcula para cada ciclo. El clculo tiene en cuenta las duraciones calculadas anteriormente, aunque no aplicadas todava con una limitacin en t_motor. As, cualquier modificacin de salida del regulador PID puede tenerse en cuenta, incluso cuando el impulso dure varios ciclos. el bloque de funcin SERVO vuelve a calcular nuevamente el parmetro T:IMP cuando el regulador actualiza su salida; es decir, cada vez que se pone SEN a 1. En este tipo de servicio las duraciones calculadas anteriormente ya no se tienen en cuenta.
el regulador PID en el servicio manual es,
el regulador PID en el servicio automtico es,
Algoritmos con sensado de posicin
El algoritmo se asemeja en gran medida al caso anterior. En lugar de la modificacin de salida del regulador PID, el bloque de funcin SERVO utiliza la variacin entre la salida de valor absoluto del regulador PID y el sensado de posicin (IN - RCPY). El bloque de funcin efecta una regulacin de la posicin con la salida del regulador PID como valor terico, y el sensado de posicin RCPY como medida. Al contrario del algoritmo sin sensado de posicin, el bloque de funcin almacena en el servicio manual las duraciones anteriormente calculadas, pero no las que no han sido aplicadas a las salidas RAISE y LOWER.
478
33002250
SERVO: Control para servomotores elctricos
Modalidades de servicio
Adaptacin a las modalidades de servicio Modalidad automtica Modalidad manual
La entrada MA_I permite al bloque de funcin SERVO adaptar su comportamiento a la modalidad de servicio. Aqu debe conectarse con la salida MA_O del regulador o del bloque de funcin MS correspondiente. El bloque de funcin SERVO slo vuelve a leer la salida de regulador si ste se actualiza (es decir, siempre que SEN se ponga a 0). Aqu, el usuario puede modificar en cualquier momento la salida de regulador. Para que el nuevo valor se incluya cuanto antes, el bloque de funcin lee la salida de regulador en cada ciclo. En esta modalidad, el usuario puede modificar manualmente la variable conectada a la salida OUT de un corrector de un bloque MS. Si no se utiliza el sensado de posicin, esta variable puede saturarse (100% 60%), a pesar de que el actuador no ha alcanzado una de sus posiciones finales. Pero es an posible variar manualmente las modificaciones de salida OUTD, posicionando la salida OUT del bloque de funcin MS por encima de 100% o por debajo de 0%. El valor asignado a OUT se utilizar entonces para calcular OUTD antes de que se establezcan los nuevos lmites.
33002250
479
SERVO: Control para servomotores elctricos
Ejemplos del bloque de funcin SERVO
Vista general de los ejemplos
En esta seccin se muestra la utilizacin del bloque SERVO en los siguientes ejemplos: Ejemplo de la modalidad de servicio automtico con sensado de posicin, p. 480 Ejmeplo de la modalidad de servicio automtico sin sensado de posicin en servicio manual, p. 484
Ejemplo de la modalidad de servicio automtico con sensado de posicin
480
l l
En el ejemplo se muestra el comportamiento del bloque de funcin en la modalidad de servicio automtico con sensado de posicin. Siempre que la entrada SEN se ponga a 1 (en el ejemplo cada 4 s), el bloque de funcin SERVO considera un nuevo valor de desviacin IN-RCPY. Los siguientes parmetros determinados son vlidos:
Parmetros
t_motor t_mini Periodo de exploracin
Valor predeterminado
25 s 1s 4s
33002250
SERVO: Control para servomotores elctricos
Diagrama de ciclos (automtico con sensado de posicin)
Diagrama de ciclos para la modadlidad de servicio automtico con sensado de posicin
SEN
Perodo de exploracin = 4s
IN-RCPY
20% 10% -2% -2%
RAISE
LOWER
33002250
481
SERVO: Control para servomotores elctricos
Explicacin de los ciclos
Explicacin de los lugares marcados:
N de lugar
1 2
Explicacin:
La variacin IN-RCPY es del 20%: se genera un impulso de duracin 5 s (=20% de 25 s) en la salida RAISE. La variacin ahora es de slo 10 %, se genera un impulso de 2,5 s (= 10% de 25 s), los segundos que quedan desde el impulso anterior no se consideran. La variacin ahora es de 2%, lo que se corresponde con un impulso de 0,5 s en LOWER. Dado que t_mini se corresponde con 1 s, no se genera impulso (sin embargo, la duracin de 0,5 s se almacena). La variacin sigue siendo de -2%, pero el impulso correspondiente (0,5 s) se aade al impulso anterior para llegar a 1 s. La duracin se corresponde con t_mini, por eso se aplica el impulso a la salida LOWER.
482
33002250
SERVO: Control para servomotores elctricos
Ejemplo de programacin (automtico con sensado de posicin)
Representacin del diagrama de funciones, parte 1
FBI_4_1 (1) SAMPLETM TC2_ST INTERVAL DELSCANS Q 1
TC2_PID_SERVO_RCPY (2) PIDFF TT2 TC2_SP OUT_RCPY 1 TC2_PARA EN ENO PV OUT SP OUTD FF RCPY MAN_AUTO MA_O PARA INFO TR_I STATUS TR_S TC2_PARA.en_rcpy=1 TC2_MS_RCPY (3) MS IN OUT FORC OUTD MA_FORC MA_O MAN_AUTO STATUS PARA TR_I TR_S 2 3
TC2_MODE TC2_PARA_MS
33002250
483
SERVO: Control para servomotores elctricos
Representacin del diagrama de funciones, parte 2
FBI_4_4 (4) SERVO 1 2 3 OUT_RCPY SEN IN INPD MA_I RCPY RST R_STOP L_STOP PARA RAISE OUT_RAISE
LOWER STATUS
OUT_LOWER
SERVO_PARA
SERVO_PARA.en_rcpy=1
OUT_RCPY Valor real del sensado de la vlvula
Ejmeplo de la modalidad de servicio automtico sin sensado de posicin en servicio manual
En el ejemplo se muestra el comportamiento del bloque de funcin en la modalidad de servicio automtico sin sensado de posicin en servicio manual. En este caso, se tiene en cuenta el valor de INPD en cada ejecucin del bloque de funcin SERVO, independientemente de qu valor tenga la entrada SEN. Los siguientes parmetros determinados son vlidos:
Parmetros
t_motor t_mini
Valor predeterminado
25 s 1s
484
33002250
SERVO: Control para servomotores elctricos
Diagrama de ciclos (automtico sin sensado de posicin)
Modalidad de servicio automtico sin sensado de posicin en servicio manual
INPD
20% 2% 0 2%
22%
-24%
RAISE 0 5s 1s
LOWER 0 1 2 3 4 1s 5
Explicacin de los ciclos
Explicacin de los lugares marcados:
N de lugar
1 2
Explicacin
La modificacin de la salida del modificador PID es de + 20%, en este caso el impulso se refiere a la salida RAISE y dura 5 s (=20% de 25 s). La modificacin del regulador PID es de + 2 %, lo que se corresponde con una duracin del impulso de 0,5 s. El impulso es menor que t_mini (=1 s), de modo que no influye las salidas. En la segunda modificacin de +2 %, la funcin aade esta modificacin a las anteriores (que se corresponde con la una variacin que est por debajo del valor mnimo), lo que se corresponde con una modificacin global positiva del +4 %, es decir, con un impulso de 1 s en la salida RAISE. En una modificacin de -24 % el impulso de la salida LOWER es de 6 s Antes de que transcurra el segundo siguiente, otra variacin de + 22 % restablece el sistema a una modificacin global de 2 %< de t_mini (4 %). La funcin termina de efectuar el impulso mnimo de 1 s.
4 5
33002250
485
SERVO: Control para servomotores elctricos
Ejemplo de programacin (automtico sin sensado de posicin)
Representacin del diagrama de funciones, parte 1
FBI_3_4 (1) SAMPLETM TC2_ST INTERVAL DELSCANS Q 1
TC2_PID_SERVO (2) PIDFF TT2 TC2_SP OUT_RCPY 1 TC2_PARA EN ENO PV OUT SP OUTD FF RCPY MAN_AUTO MA_O PARA INFO TR_I STATUS TR_S TC2_PARA.en_rcpy=1 TC2_MS (3) MS TT2_DEF 0 TC2_MODE TC2_PARA_MS IN OUT FORC OUTD MA_FORC MA_O MAN_AUTO STATUS PARA TR_I TR_S TC2_OUT 2 3
486
33002250
SERVO: Control para servomotores elctricos
Representacin del diagrama de funciones, parte 2
FBI_3_1 (4) SERVO 1 SEN IN INPD MA_I RCPY RST R_STOP L_STOP PARA RAISE OUT_RAISE
2
3 OUT_RCPY
LOWER STATUS
OUT_LOWER
SERVO_PARA
SERVO_PARA.en_rcpy=1
TT2_DEFF Indicador de errores del valor real TT2: Si TT2 tiene errores, el circuito regulador tendr que manipularse en servicio manual.
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante IN o RCPY no estn comprendidos en el rango [0, 100] o INPD est fuera del rango [-100, 100]. Para el clculo, el bloque de funcin utiliza un valor que est limitado por el siguiente valor correcto, es decir, segn el caso para el valor 0, 100 o -100.
Aviso de error
Aparecer un error si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. Las salidas RAISE y LOWER en este caso se ponen a cero.
33002250
487
SERVO: Control para servomotores elctricos
488
33002250
SMOOTH_RATE: Diferenciador con alisamiento
52
Vista general
Introduccin Contenido:
Este captulo describe el bloque SMOOTH_RATE. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas para el bloque de funcin SMOOTH_RATE Descripcin detallada
Pgina
490 490 491 492
33002250
489
SMOOTH_RATE: Diferenciador con alisamiento
Descripcin breve
Descripcin de funcionamiento
Este bloque de funcin representa una unidad de diferenciacin con una salida Y retardada por una constante de tiempo LAG. El bloque de funcin dispone de las siguientes modalidades de servicio: Manual Detenido Automtico
Representacin
Smbolo
Descripcin de parmetros
490
l l l
Se pueden proyectar EN y ENO como parmetros adicionales.
Representacin del bloque
SMOOTH_RATE
BOOL BOOL REAL REAL TIME REAL
MAN HALT X GAIN LAG YMAN
REAL
Descripcin de parmetros del bloque
Parmetros
MAN HALT X GAIN LAG YMAN Y
Tipo de datos
BOOL BOOL REAL REAL TIME REAL REAL
Significado
"1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido Magnitud de entrada Amplificacin de la diferenciacin Constante de tiempo de retardo Valor de posicionado manual Salida diferenciador con alisamiento
33002250
SMOOTH_RATE: Diferenciador con alisamiento
Frmulas para el bloque de funcin SMOOTH_RATE
Funcin de transferencia
La funcin de transferencia para Y es:
1 G(s) = GAIN -----------------------------1 + s LAG
Salida Y
La salida Y se determina de la siguiente manera:
dt Y = ----------------------- ( Y ( old ) + GAIN ( X ( new ) X ( ol d ) ) ) dt + LAG
Explicacin de las magnitudes de las frmulas
Significado de las magnitudes de las frmulas arriba mencionadas:
Magnitud
dt
Significado
la diferencia de tiempo entre el ciclo actual y el anterior Valor de la entrada X del ciclo actual Valor de la entrada X del ciclo anterior Valor de la salida Y del ciclo anterior
X ( new ) X ( old ) Y ( old )
33002250
491
SMOOTH_RATE: Diferenciador con alisamiento
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin tiene lugar mediante la determinacin de la amplificacin GAIN del diferenciador y de la constante de tiempo LAG con la cul se retarda la salida Y. Para tiempos de exploracin muy cortos y para la entrada de un escaln unitario en la entrada X (salto en la entrada X de 0 a 1.0), la salida Y saltar al valor GAIN (valor terico - real un poco ms pequeo, debido a que el tiempo de exploracin no puede ser infinitamente pequeo), para luego retornar nuevamente a 0 con la constante de tiempo LAG.
Modalidades de servicio
El bloque de funcin SMOOTH_RATE tiene 3 tipos de servicio: Automtico, Manual y Detenido. Estas modalidades se pueden seleccionar a travs de las entradas MAN y HALT.
Modalidad de servicio
Automtico Manual Detenido
MAN
0 1 0
HALT
0 01 1
Significado
El bloque de funcin se procesar tal y como se describe en "Parametrizacin". La entrada YMAN se transmitir a la salida Y. La salida Y se mantendr en el ltimo valor calculado.
492
33002250
SMOOTH_RATE: Diferenciador con alisamiento
Ejemplo
En la figura siguiente aparece representada la respuesta a escaln del bloque de funcin SMOOTH_RATE con GAIN=1 y LAG=10 s:
X YMAN Y
HALT 0 MAN 1 0
33002250
493
SMOOTH_RATE: Diferenciador con alisamiento
494
33002250
SP_SEL: Conmutador de valor terico
53
Vista general
Introduccin Contenido:
Este captulo describe el bloque SP_SEL. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
496 497 499 502
33002250
495
SP_SEL: Conmutador de valor terico
Descripcin breve
Descripcin de funcionamiento
Este bloque de funcin permite elegir el tipo de valor terico que debe utilizarse en el circuito de regulacin:
Tipo de valor terico Explicacin
Valor terico externo (SP_RSP=1) Valor terico interno (SP_RSP = 0) El valor terico proviene de un clculo de bloque externo por medio de la entrada RSP (Remote Set Point). El valor de entrada RSP se conduce a la salida SP. El usuario debe modificar directamente el valor terico (Local Set Point). En esta modalidad de servicio la salida SP no est ajustada por medio del bloque de funcin, el propio usuario modifica la variable conectada a SP.
Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin SP_SEL dispone de las siguientes propiedades: La conmutacin entre los dos tipos de valores tericos puede darse sin brusquedad Servicio con seguimiento del valor terico, si el regulador est en servicio manual Limitacin superior e inferior del valor terico utilizado
496
l l l
33002250
SP_SEL: Conmutador de valor terico
Representacin
Smbolo
Representacin del bloque
SP_SEL
REAL BOOL Para_SP_SEL REAL BOOL
RSP SP_RSP PARA PV MA_I
SP LSP_MEM STATUS
REAL REAL WORD
Descripcin del parmetro SP_SEL
Descripcin de los parmetros del bloque
Parmetros
RSP SP_RSP
Tipo de datos
REAL BOOL
Significado
Valor terico externo (Remote Set Point) Tipo de valor terico utilizado por el regulador: "1" : Valor terico externo "0" : Valor terico interno Parmetros Magnitud a controlar Modalidad de servicio del regulador vinculado "1" : Modalidad automtica "0" : Modalidad manual Valor terico utilizado por el regulador Memoria del valor terico interno (Local Set Point MEMory) Palabra de estado
PARA PV MA_I
Para_SP_SEL REAL BOOL
SP LSP_MEM STATUS
REAL REAL WORD
33002250
497
SP_SEL: Conmutador de valor terico
Descripcin de los parmetros Para_SP_SEL
Descripcin de la estructura de datos
Elemento
sp_min sp_max bump
Tipo de datos
REAL REAL BOOL
Significado
Valor lmite inferior del valor terico utilizado Valor lmite superior del valor terico utilizado Con conmutacin externa/ interna: "1" : la salida SP se fuerza con el valor de LSP_MEM "0" : conmutacin sin brusquedad "1" : en modalidad manual, el valor de SP se alinea sobre PV (slo en valor terico interno) Pendiente de SP en la conmutacin interna / externa en unidades por segundo (0)
track rate
BOOL REAL
498
33002250
SP_SEL: Conmutador de valor terico
Descripcin detallada
Conmutacin del valor terico
La conmutacin del valor terico puede darse en dos direcciones:
Si ...
SP_RSP de 0 a 1 SP_RSP de 1 a 0
Entonces ...
se da una conmutacin del valor terico interno a un valor terico externo se da la conmutacin del valor terico externo al valor terico interno
SP_RSP de 0a1
La conmutacin del valor terico interno a un valor terico externo tiene lugar sin brusquedad: el valor de la salida SP aumenta para alcanzar el valor terico externo RSP, siguiendo una rampa de pendiente rate. Si rate = 0, no se efectuar rampa alguna y SP ser una copia directa de RSP.
SP_RSP de 1a0
La conmutacin del valor terico externo al valor terico interno tiene lugar independientemente del elemento bump de dos formas:
Si ...
bump = 0
Entonces ...
la conmutacin tiene lugar sin brusquedad: el bloque de funcin cesa de copiar la entrada RSP en la salida SP. El valor terico interno SP ser entonces el ltimo valor terico externo RSP antes de la conmutacin. El usuario lo puede modificar a continuacin. En este caso, no es necesario conectar la salida LSP_MEM. el valor de la salida LSP_MEM se transfiere a la salida SP en el momento de la conmutacin (que puede tener lugar con brusquedad). El valor otorgado a LSP_MEM corresponde al ltimo valor terico SP antes de que el bloque de funcin pase a la modalidad externa. Para reiniciar la modalidad interna con otro valor terico, es suficiente con modificar LSP_MEM mientras el bloque todava se encuentre en modalidad externa (para ms detalles vase " Tarea de la salida LSP_MEM, p. 500 ").
bump = 1
33002250
499
SP_SEL: Conmutador de valor terico
Valor terico de seguimiento (track = 1)
Si en el valor terico interno (SP_RSP=0) el regulador vinculado se encuentra en la modalidad manual, permite hacer una copia permanente de la entrada PV en el valor terico SP utilizado. Esto permite evitar las brusquedades en la conmutacin Manual/Automtico (tambin es posible que el regulador mismo se encargue de que no haya brusquedad). En esta modalidad de servicio, las entradas PV y MA_I del bloque de funcin SP_SEL deben estar conectadas. Deben tomar los mismos valores que la entrada PV del regulador y su salida MA_O. Si track = 0, las entradas no necesitan estar conectadas.
Limitaciones
Cualquiera que sea la modalidad de servicio (externa o interna), el valor terico utilizado SP se encontrar entre los mrgenes sp_min y sp_max. Esta salida permite al usuario controlar el valor terico SP en el momento de la conmutacin externa hacia interna:
Tipo de valor terico Comportamiento de la salida
Valor terico interno Conmutacin a valor terico externo Retorno al valor terico interno anterior El valor de SP se transfiere continuamente a LSP_MEM. El bloque ya no modifica el valor de LSP_MEM y mantiene, por tanto, el ltimo valor terico interno utilizado. En este caso existen dos posibilidades: 1. bump = 0: El ltimo valor terico externo se considera como base, en este caso no es necesario que LSP_MEM est conectado. 2. bump = 1: El ltimo valor terico interno memorizado se considera como base; en el momento de la conmutacin, el bloque copia el valor de LSP_MEM a SP. 3. El bloque de funcin puede iniciar el servicio interno por medio de un valor elegido al azar por el usuario. Si el valor de las variables conectadas a LSP_MEM se modifican antes de su traspaso al valor terico interno (con bump = 1), este valor se conducir a SP en el momento de la conmutacin.
Tarea de la salida LSP_MEM
500
33002250
SP_SEL: Conmutador de valor terico
Ejemplo de programacin
A continuacin ver un ejemplo de la programacin del bloque de funcin SP_SEL.
TC2_SP_SEL (1)
SP_SEL
TC2_REM_SP TC2_LOC_REM TC2_SP_PARA TT2 TC2_MAO
TC2_SP
RSP SP_RSP PARA PV MA_I
SP
LSP_MEM STATUS
TC2_LSP_MEM
TC2_PID_SPSEL (2)
PIDFF
TT2
TC2_MAN_AUTO TC2_PARA
PV OUT OUTD SP FF RCPY MAN_AUTO MA_O INFO PARA STATUS TR_I TR_S
TC2_oV
TC2_MAO
TC2_SP lo introduce el operador en el servicio "valor terico interno".
33002250
501
SP_SEL: Conmutador de valor terico
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1 Bit 5 = 1 Bit 6 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante rate es negativo: para el clculo, el bloque de funcin utiliza el valor 0. La salida SP ha alcanzado el valor lmite inferior sp_min: SP se fuerza a sp_min La salida SP ha alcanzado el valor lmite superior sp_max: SP se fuerza a sp_max
Aviso de error
Aparecer un error de tiempo de ejecucin si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. Las salidas SP y LSP_MEM no varan. Se dar un aviso cuando rate sea negatico; entonces el bloque utiliza para el clculo el valor 0.
Advertencia
502
33002250
SPLRG: Control de dos actuadores
54
Vista general
Introduccin Contenido:
Este captulo describe el bloque SPLRG. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
504 505 506 508
33002250
503
SPLRG: Control de dos actuadores
Descripcin breve
Descripcin de funcionamiento
La utilizacin de este bloque de funcines pertinente si se utilizan dos actuadores para poder cubrir todo el rango de regulacin (para 2 puntos de trabajo alejados: uno abajo y otro arriba). El regulador es adecuado para el regulador paso a paso de tres puntos; es decir, en casos en que ambos actuadores actan como contrarios (un actuador calienta y el otro refrigera). Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin SPLRG dispone de las siguientes propiedades: Posibilidad de conducir una zona de insensibilidad o una zona de traspaso con ajuste de las propiedades de ambos actuadores La entrada IN est expresada en porcentaje (0-100%), las salidas OUT1 y OUT2 estn expresadas en unidades fsicas.
504
l l
33002250
SPLRG: Control de dos actuadores
Representacin
Smbolo
Representacin del bloque
SPLRG
REAL Para_SPLRG
IN PARA
OUT1 OUT2 STATUS
REAL REAL WORD
Descripcin de parmetros de SPLRG
Descripcin de los parmetros del bloque
Parmetros
IN PARA OUT1 OUT2 STATUS
Tipo de datos
REAL Para_SPLRG REAL REAL WORD
Significado
Valor separador (de 0 a 100%) Parmetros Magnitud de posicionado para actuador 1 Magnitud de posicionado para actuador 2 Palabra de estado
Descripcin de parmetros Para_SPLRG
Descripcin de la estructura de datos
Elemento
out1_th1 out1_th2 out1_inf out1_sup out2_th1 out2_th2 out2_inf out2_sup
Tipo de datos
REAL REAL REAL REAL REAL REAL REAL REAL
Significado
Valor de entrada IN, para l rige: OUT1 = out1_inf Valor de entrada IN, para l rige: OUT1 = out1_sup Valor lmite inferior de la salida OUT1 Valor lmite superior de la salida OUT1 Valor de entrada IN, para l rige: OUT2 = out2_inf Valor de entrada IN, para l rige: OUT2 = out2_sup Valor lmite inferior para la salida OUT2 Valor lmite superior para la salida OUT2
33002250
505
SPLRG: Control de dos actuadores
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin permanece en la definicin de las propiedades de cada actuador; es decir, en el tipo de modificacin de gradientes de las dos salidas del regulador en comparacin con la entrada IN. Para la salida OUT1 deben definirse los siguientes puntos:
Elemento
out1_inf out1_sup out1_th1 out1_th2
Significado
Valor lmite inferior del rango Valor lmite superior del rango Umbral; es decir, el valor de entrada IN, para l rige: Salida OUT1 = out1_inf Umbral; es decir, el valor de entrada IN, para l rige: Salida OUT1 = out1_sup
Para los umbrales la modificacin del valor de OUT1 es lineal. Aparte de los dos umbrales no se pueden efectuar modificaciones en la salida, que est limitada a out1_inf o a out1_sup. Segn el ajuste de los dos umbrales, se indican las propiedades de regulacin por medio de un crecimiento positivo (en el caso de out1_th1 < out1_th2) o negativo (out1_th2 < out1_th1). Los diagramas siguientes representan las propiedades de ambos actuadores en el regulador paso a paso Split-Range y de tres puntos.
Regulador paso a paso de tres puntos
Aqu puede ver la representacin de las propiedades de ambos actuadores en una regulacin pasos a paso de tres puntos
OUT out1_sup out2_sup out2_inf out1_inf IN 0% out1_th2 out1_th1 out2_th1 out2_th2 100 %
OUT1
OUT2
506
33002250
SPLRG: Control de dos actuadores
Regulacin SplitRange
Aqu puede ver la representacin de las propiedades de ambos actuadores en una regulacin Split-Range.
OUT out1_sup out2_sup out2_inf out1_inf IN 0 % out1_th1 out1_th2 out2_th1 out2_th2 100 %
OUT1
OUT2
Nota: Las salidas de este regulador no pueden utilizarse sin sensado de posicin para el control de un bloque de funcin SERVO.
Modalidades de servicio
El bloque de funcin SPLRG no tiene asignado ningn tipo de servicio especfico. Sin embargo, es posible controlar manualmente las dos salidas del bloque de funcin, asignando a cada salida un bloque de funcin MS. Para la programacin, el usuario deber tener cuidado de que el retorno a la modalidad de servicio automtico tenga lugar sin brusquedad.
33002250
507
SPLRG: Control de dos actuadores
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante IN u otro de los parmetros out1_th1, out1_th2, out2_th1, out2_th2 no se encuentra en el rango [0, 100]: Para el clculo, el bloque de funcin utiliza el valor 0 100. La salida OUT1 ha alcanzado el valor lmite inferior out1_inf: OUT1 se fuerza a out1_inf. La salida OUT1 ha alcanzado el valor lmite superior out1_sup: OUT1 se fuerza a out1_sup. Los dos umbrales de una salida son idnticos: out1_th1 = out1_th2, out2_th1 = out2_th2. La salida OUT2 ha alcanzado el valor lmite inferior out2_inf: OUT2 se fuerza a out2_inf. La salida OUT2 ha alcanzado el valor lmite superior out2_sup: OUT2 se fuerza a out2_sup.
Bit 5 = 1 Bit 6 = 1 Bit 7 = 1 Bit 8 = 1 Bit 9 = 1
Aviso de error
En los siguientes casos se generar un mensaje de error de tiempo de ejecucin: En una entrada se crea un valor no flotante. En el clculo con valores con coma flotante surge un problema. Los dos umbrales de una misma salida son idnticos: out1_th1 = out1_th2 out2_th1 = out2_th2
Advertencia
508
l l l
Las salidas OUT1 y OUT2 no se modifican. Se emite una advertencia cuando uno de los parmetros out1_th1, out1_th2, out2_th1, out2_th2 no se encuentra en el rango [0, 100]: En este caso, el bloque de funcin utiliza el valor 0 100 para el clculo.
33002250
STEP2: Regulador de dos puntos
55
Vista general
Introduccin Contenido:
Este captulo describe el bloque STEP2. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
510 511 512 514
33002250
509
STEP2: Regulador de dos puntos
Descripcin breve
Descripcin de funcionamiento
Este bloque de funcin es apropiado para las regulaciones simples de dos puntos. El control del actuador tiene lugar segn la direccin de variacin valor terico valor real en relacin con los valores lmite superior e inferior. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque del regulador dispone de las siguientes propiedades: Limitacin superior e inferior del valor terico entre pv_inf y pv_sup Los valores del regulador (valor real, valor terico y sus respectivos parmetros) se expresan en unidades fsicas.
510
l l
33002250
STEP2: Regulador de dos puntos
Representacin
Smbolo
Representacin del bloque
STEP2
REAL REAL BOOL Para_STEP2
PV OUT SP DEV MAN_AUTO MA_O PARA STATUS
BOOL REAL BOOL WORD
Descripcin del parmetro STEP2
Descripcin de los parmetros del bloque
Parmetros
PV SP MAN_AUTO
Tipo de datos
REAL REAL BOOL
Significado
Valor real (Process Value) Valor terico (Set Point) Regulador de modalidad de servicio: "1" : Servicio Automtico "0" : Servicio Halt Parmetros Salida lgica Variacin (PV - SP) Modalidad de servicio actual del bloque de funcin (0: Halt, 1 : Automtico) Palabra de estado
PARA OUT DEV MA_O STATUS
Para_STEP2 BOOL REAL BOOL WORD
Descripcin del parmetro Para_STEP2
Descripcin de la estructura de datos
Elemento
dev_ll dev_hl pv_inf pv_sup
Tipo de datos
REAL REAL REAL REAL
Significado
Umbral inferior de la variacin ( 0) Umbral superior de la variacin ( 0) Lmite inferior del rango del valor real Lmite superior del rango del valor real
33002250
511
STEP2: Regulador de dos puntos
Descripcin detallada
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del bloque STEP2:
OUT OUT
SP
pv_sup pv_inf
_ + PV
dev_ll
dev_hl
dev_hl
dev_ll
Comportamiento de la salida
Comportamiento de la salida OUT:
OUT
DEV dev_hl
dev_ll
Si la variacin (DEV = PV - SP) queda por debajo del umbral inferior dev_ll, la salida lgica OUT se pondr a 1. Pero si la variacin vuelve a aumentar, la salida OUT slo se pondr a cero si la variacin supera dev_hl.
Nota: Para garantizar un funcionamiento del bloque sin fallos, la salida OUT no deber invertirse.
512
33002250
STEP2: Regulador de dos puntos
Modalidades de servicio
El bloque regulador STEP2 tiene 2 modalidades de servicio, dependiendo del valor del parmetro MAN_AUTO:
Modalidad de servicio
Automtico Halt
MAN_AUTO
1 0
Significado
La salida OUT es calculada por el propio bloque regulador. La salida OUT se mantiene en el ltimo valor calculado.
33002250
513
STEP2: Regulador de dos puntos
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante Se mostrarn los siguientes comportamientos: SP se encuentra fuera del rango [pv_inf, pv_sup]: SP se limita a pv_inf o pv_sup dev_ll > 0 o dev_hl < 0: el bloque utiliza el valor 0
Aviso de error
Aparecer un error de tiempo de ejecucin si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. La salida OUT se pondr a 0, las salidas DEV y MA_O no cambiarn. Se generar una advertencia si dev_ll > 0 o dev_hl < 0. En este caso el bloque de funcin utilizar el valor 0.
Advertencia
514
l l
33002250
STEP3: Regulador de tres puntos
56
Vista general
Introduccin Contenido:
Este captulo describe el bloque STEP3. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
516 517 518 520
33002250
515
STEP3: Regulador de tres puntos
Descripcin breve
Descripcin de funcionamiento
Este bloque de funcin es apropiado para las regulaciones simples de tres puntos. El control del actuador tiene lugar segn la direccin de variacin valor terico valor real en relacin con los umbrales superior e inferior. El control de los umbrales describe una histresis paramtrica. Este regulador tambin puede utilizarse para la regulacin caliente/fro. En el caso de regulaciones complejas, se utiliza un regulador tradicional (por ejemplo, un regulador PI_B) al que hay que supeditar un bloque de funcin, como por ejemploel PWM1. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque del regulador dispone de las siguientes propiedades: Limitacin del valor terico entre pv_inf y pv_sup Los valores del regulador (valor real, valor terico y sus respectivos parmetros) se expresan en unidades fsicas.
516
l l
33002250
STEP3: Regulador de tres puntos
Representacin
Smbolo
Representacin del bloque
STEP3
REAL REAL BOOL Para_STEP3
OUT_NEG PV SP OUT_POS MAN_AUTO DEV PARA MA_O STATUS
BOOL BOOL REAL BOOL WORD
Descripcin del parmetro STEP3
Descripcin de los parmetros del bloque
Parmetros
PV SP MAN_AUTO
Tipo de datos
REAL REAL BOOL
Significado
Valor real (Process Value) Valor terico (Set Point) Regulador de modalidad de servicio: "1" : Servicio Automtico "0" : Servicio HALT Parmetros Salida lgica: se pone a 1 en caso de variaciones negativas Salida lgica: se pone a 1 en caso de variaciones positivas Variacin (PV - SP) Modalidad de servicio actual del bloque de funcin (0: HALT, 1 : Automtico) Palabra de estado
PARA OUT_NEG OUT_POS DEV MA_O STATUS
Para_STEP3 BOOL BOOL REAL BOOL WORD
Descripcin de parmetros Para_STEP3
Descripcin de la estructura de datos
Elemento
dev_11 dev_hl hys pv_inf pv_sup
Tipo de datos
REAL REAL REAL REAL REAL
Significado
Umbral inferior de la variacin ( 0) Umbral superior de la variacin ( 0) Histresis Lmite inferior del rango del valor real Lmite superior del rango del valor real
33002250
517
STEP3: Regulador de tres puntos
Descripcin detallada
Diagrama de estructura
A continuacin encontrar el diagrama de estructura del bloque STEP3:
OUT_POS OUT_POS hyst pv_sup SP pv_inf
1
dev_lll
dev_hl
-1
OUT_NEG
hyst OUT_NEG PV dev_hl
dev_ll
518
33002250
STEP3: Regulador de tres puntos
Comportamiento de las salidas
Comportamiento de las salidas OUT_POS y OUT_NEG:
OUT_POS
OUT_NEG
DEV dev_hl hyst
td
hyst
dev_ll
td Duracin
Si la variacin (DEV = PV - SP) aumenta por encima de dev_hl, la salida lgica OUT_POS se pondr a 1. No obstante, si la variacin es menor, OUT_POS slo se pondr a cero si la variacin no alcanza el valor de dev_hl - hyst. Si la variacin queda por debajo del valor de dev_ll, la salida lgica OUT_NEG se pondr a 1. Si la variacin vuelve a aumentar, OUT_NEG slo se ajustar a cero si la variacin aumenta por encima de dev_ll + hyst.
Nota: Para garantizar un funcionamiento del bloque sin fallos, las salidas OUT_NEG y OUT_POS no debern invertirse.
33002250
519
STEP3: Regulador de tres puntos
Modalidades de servicio
El bloque regulador STEP3 tiene 2 modalidades de servicio, dependiendo del valor del parmetro MAN_AUTO:
Modalidad de servicio
Automtico HALT
MAN_AUTO
1 0
Significado
Las salidas OUT_NEG y OUT_POS las calcula el propio bloque. Las salidas OUT_NEG y OUT_POS son mantienes en el ltimo valor calculado.
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante Se mostrarn los siguientes comportamientos: SP se encuentra fuera del rango [pv_inf, pv_sup]: En este caso, SP estar limitada por pv_inf o pv_sup. dev_ll > 0 o dev_hl < 0: el bloque utiliza el valor 0 hyst est fuera del rango [0, mnimo (dev_hl, -dev_ll)]: el bloque utiliza un valor limitado por cero o por el mnimo (dev_hl, -dev_ll)
Aviso de error
Aparecer un error de tiempo de ejecucin si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. Las salidas OUT_NEG y OUT_POS se pondrn en este caso a 0, las salidas DEV y MA_O no se modificarn. En los siguientes casos se emitir una advertencia: dev_ll > 0 o dev_hl < 0: el bloque utiliza el valor 0. hyst est fuera del rango [0, mnimo (dev_hl, -dev_ll)]: el bloque utiliza un valor limitado.
Advertencia
520
l l l
l l
33002250
SUM_W: Sumador
57
Vista general
Introduccin Contenido:
Este captulo describe el bloque SUM_W. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Error de tiempo de ejecucin
Pgina
522 522 523
33002250
521
SUM_W: Sumador
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin realiza la adicin ponderada de 3 magnitudes de entrada numricas de acuerdo con la frmula que se indica ms abajo. Se pueden proyectar EN y ENO como parmetros adicionales.
Frmula
El bloque SUM_W funciona de la siguiente forma:
OUT = k1 IN1 + k2 IN2 + k3 IN3 + c1
Representacin
Smbolo
Representacin del bloque
SUM_W
REAL REAL REAL Para_SUM_W
IN1 IN2 IN3 PARA
OUT
REAL
Descripcin de parmetros SUM_W
Descripcin de los parmetros del bloque
Parmetros
de IN1 a IN3 PARA OUT
Tipo de datos
REAL Para_SUM_W REAL
Significado
Magnitudes numricas que hay que procesar Parmetros Resultado del clculo
Descripcin de parmetros Para_SUM_W
Descripcin de la estructura de datos
Elemento
k1 a k3, c1
Tipo de datos
REAL
Significado
Coeficientes de clculo
522
33002250
SUM_W: Sumador
Error de tiempo de ejecucin
Aviso de error
Aparecer un error de tiempo de ejecucin si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. La salida OUT no se modifica.
33002250
523
SUM_W: Sumador
524
33002250
THREEPOINT_CON1: Regulador de tres puntos
58
Vista general
Introduccin Contenido:
Este captulo describe el bloque THREEPOINT_CON1. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
526 526 528 531
33002250
525
THREEPOINT_CON1: Regulador de tres puntos
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin reproduce un regulador de tres puntos que, mediante dos realimentaciones dinmicas, recibe un comportamiento similar a un PID. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin THREEPOINT_CON1 tiene las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Dos realimentaciones internas (retardador de primer orden)
Representacin
Smbolo
526
l l
Representacin del bloque
THREEPOINT_CON1
BOOL BOOL REAL REAL REAL TIME TIME REAL REAL REAL BOOL BOOL
MAN Y_POS HALT Y_NEG SP ERR_EFF PV GAIN LAG_NEG LAG_POS HYS DB XF_MAN YMAN_POS YMAN_NEG
BOOL BOOL REAL
33002250
THREEPOINT_CON1: Regulador de tres puntos
Descripcin de parmetros
Descripcin de los parmetros del bloque
Parmetros
MAN HALT SP PV GAIN LAG_NEG LAG_POS HYS DB XF_MAN YMAN_POS YMAN_NEG Y_POS Y_NEG ERR_EFF
Tipo de datos
BOOL BOOL REAL REAL REAL TIME TIME REAL REAL REAL BOOL BOOL BOOL BOOL REAL
Significado
"1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido Entrada de valor terico Entrada de valor real Amplificacin de la realimentacin (Juego de parmetros de realimentacin) Constante de tiempo de la realimentacin rpida (juego de parmetros de realimentacin) Constante de tiempo de la realimentacin lenta (juego de parmetros de realimentacin) Histresis del conmutador de tres puntos Zona de insensibilidad Valor de reseteado de la realimentacin en % (desde -100 hasta 100) Valor de posicionado manual para Y_POS Valor de posicionado manual para Y_NEG "1" = magnitud de posicionado positiva en la salida ERR_EFF "1" = magnitud de posicionado negativa en la salida ERR_EFF Valor efectivo de conmutacin
33002250
527
THREEPOINT_CON1: Regulador de tres puntos
Descripcin detallada
Estructura del regulador
Estructura del regulador de tres puntos:
Y ERR_EFF SP
+ + -
Y_POS Y Y_NEG
PV
xf
+ -
xf1
GAIN G ( s ) = ---------------------------------------------1 + LAG_NEG s
xf2
GAIN G ( s ) = -------------------------------------------1 + LAG_POS s
Dependencia entre las salidas Y_POS e Y_NEG y la magnitud Y:
Si ...
Y=1 Y=0 Y = -1
Entonces ...
Y_POS = 1 Y_NEG = 0 Y_POS = 0 Y_NEG = 0 Y_POS = 0 Y_NEG = 1
528
33002250
THREEPOINT_CON1: Regulador de tres puntos
Principio del regulador de tres puntos
Al autntico regulador de tres puntos se le aaden dos realimentaciones dinmicas (unidades PT1). Gracias a una eleccin apropiada de la constante de tiempo de estas unidades de realimentacin, el regulador de tres puntos tiene un comportamiento dinmico que corresponde al de un regulador PD. Principio del regulador de tres puntos
Y_POS HYS ERR_EFF SP
+ + -1
DB
Y_POS
1 0
PV HYS xf1 xf2
DB
ERR_EFF
Y_NEG
Y_NEG
El parmetro GAIN tiene que ser > 0.
Nota: Para XF_MAN (significado entre -100 y 100%) debern indicarse valores entre -100 y 100.
Realimentaciones internas
El bloque de funcin tiene un juego de parmetros para las realimentaciones internas compuesto por la amplificacin de realimentacin GAIN y las constantes de realimentacin LAG_NEG y LAG_POS. La siguiente tabla ofrece informacin ms precisa:
Realimentacin
Comportamiento de 3 puntos (sin realimentacin) Realimentacin negativa Realimentacin negativa + positiva Advertencia, debido al acoplamiento (realimentacin neg. con LAG_POS) Atencin, debido al acoplamiento (realimentacin positiva desconectada)
LAG_NEG
=0 >0 >0 =0 > LAG_POS
LAG_POS
=0 =0 > LAG_NEG >0 >0
33002250
529
THREEPOINT_CON1: Regulador de tres puntos
Zona de insensibilidad
El parmetro DB establece el punto de conmutacin para las salidas Y_POS e Y_NEG. Si el valor de conmutacin efectivo ERR_EFF es positivo y se hace mayor que DB, la salida Y_POS conmutar de "0" a "1". Si el valor de conmutacin efectivo ERR_EFF es negativo y se hace menor que -DB, la salida Y_NEG conmutar de "0" a "1". El valor del parmetro DB se ajusta tpicamente al 1% del rango de regulacin mximo (mx. SP - PV).
Nota: Mediante la zona de insensibilidad DB se evala el valor.
Histresis
El parmetro HYS indica la histresis de conmutacin, o sea, el valor en que se debe disminuir el valor de conmutacin efectivo ERR_EFF, partiendo del punto de conmutacin DB, antes de que la salida Y_POS (Y_NEG) se ponga de nuevo a "0". La dependencia entre Y_POS e Y_NEG con el valor de conmutacin efectivo ERR_EFF y los parmetros DB e HYS se explica en la figura Principio del regulador de tres puntos, p. 529. El valor del parmetro HYS se ajusta tpicamente al 0.5% del rango de regulacin mximo (mx. SP - PV).
Nota: Mediante la histresis HYS se evala el valor.
Modalidades de servicio
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT:
Modalidad de servicio
Automtico Manual
MAN
0 1
HALT
0 01
Significado
El bloque de funcin se procesar tal y como se ha descrito anteriormente. Las salidas Y_POS e Y_NEG se ajustan al valor YMAN_POS e YMAN_NEG. Aqu se ha aplicado la lgica de prioridad(Y_NEG predomina sobre Y_POS), lo que impide que las dos salidas se puedan ajustar al mismo tiempo. xf1 y xf2 se calculan de acuerdo con la siguiente frmula:
GAIN xf1 = XF_MAN --------------100 GAIN xf2 = XF_MAN --------------100
Detenido 0 1 Las dos salidas Y_POS e Y_NEG conservan su ltimo valor. xf1 y xf2 se ajustan a GAIN * Y.
530
33002250
THREEPOINT_CON1: Regulador de tres puntos
Error de tiempo de ejecucin
Advertencia
En los siguientes casos aparecer una advertencia:
Si ...
LAG_NEG = 0 y LAG_POS > 0
Entonces ...
El regulador funciona como si slo tuviera una realimentacin negativa con la constante de tiempo LAG_POS. El regulador funciona como si slo tuviera una realimentacin negativa con la constante de tiempo LAG_NEG. El regulador funciona sin realimentaciones internas.
LAG_POS < LAG_NEG > 0
XF_MAN < -100 o XF_MAN > 100
33002250
531
THREEPOINT_CON1: Regulador de tres puntos
532
33002250
THREE_STEP_CON1: Regulador de tres puntos de a pasos
59
Vista general
Introduccin Contenido:
Este captulo describe el bloque THREE_STEP_CON1. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
534 535 536 538
33002250
533
THREE_STEP_CON1: Regulador de tres puntos de a pasos
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin reproduce un regulador paso a paso de tres puntos que, mediante una realimentacin dinmica, recibe un comportamiento similar a un PID. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin THREE_STEP_CON1 tiene las siguientes propiedades: Modalidades de servicio Reseteado, Automtico Una realimentacin interna (retardador de primer orden)
534
l l
33002250
THREE_STEP_CON1: Regulador de tres puntos de a pasos
Representacin
Smbolo
Representacin del bloque
THREE_STEP_CON1
BOOL REAL REAL REAL TIME TIME REAL REAL
R SP PV GAIN TI T_PRO HYS DB
Y_POS Y_NEG ERR_EFF
BOOL BOOL REAL
Descripcin de parmetros
Descripcin de los parmetros del bloque
Parmetros
R SP PV GAIN TI T_PROC HYS DB ERR_EFF Y_POS Y_NEG
Tipo de datos
BOOL REAL REAL REAL TIME TIME REAL REAL REAL BOOL BOOL
Significado
"1" = Modalidad de servicio Reseteado Entrada de valor terico Entrada de valor real Amplificacin proporcional (Factor de amplificacin) Constante de tiempo de posicionado Tiempo nominal de posicionado de la vlvula conectada Histresis del conmutador de tres puntos Zona de insensibilidad Valor efectivo de conmutacin "1" = magnitud de posicionado positiva en la salida ERR_EFF "1" = magnitud de posicionado negativa en la salida ERR_EFF
33002250
535
THREE_STEP_CON1: Regulador de tres puntos de a pasos
Descripcin detallada
Estructura del regulador
Estructura del regulador de tres puntos:
Y ERR_EFF SP
+ + -
Y_POS
Y_NEG
PV
Xr
K G ( s ) = ----------------------1 + TI s
Dependencia entre las salidas Y_POS e Y_NEG y la magnitud Y:
Si ...
Y=1 Y=0 Y = -1
Entonces ...
Y_POS = 1 Y_NEG = 0 Y_POS = 0 Y_NEG = 0 Y_POS = 0 Y_NEG = 1
Significado de la magnitud K: TI K = -------------------------------------------T_PROC GAIN
536
33002250
THREE_STEP_CON1: Regulador de tres puntos de a pasos
Principio del regulador de tres puntos
Al regulador de tres puntos propiamente dicho se le aade una realimentacin dinmica (unidad PT1). Mediante la eleccin apropiada de las constantes de tiempo TI y T_PROC de estas unidades de realimentacin, el regulador de tres puntos tiene un comportamiento dinmico que corresponde al de un regulador PD. Principio del regulador de tres puntos
Y_POS HYS ERR_EFF SP
+ + -1
DB
Y_POS
1 0
PV HYS Xr
DB
ERR_EFF
Y_NEG
Y_NEG
El parmetro GAIN tiene que ser > 0.
Zona de insensibilidad
El parmetro DB establece el punto de conmutacin para las salidas Y_POS e Y_NEG. Si el valor de conmutacin efectivo ERR_EFF = SP - PV- XR es positivo y se hace mayor que DB, la salida Y_POS conmutar de "0" a "1". Si el valor de conmutacin efectivo ERR_EFF es negativo y se hace menor que -DB, la salida Y_NEG conmutar de "0" a "1". El valor del parmetro DB se ajusta tpicamente al 1% del rango de regulacin mximo (mx. (SP - PV)).
Nota: Mediante la zona de insensibilidad DB se evala el valor.
Histresis
El parmetro HYS indica la histresis de conmutacin, o sea, el valor en que se debe disminuir el valor de conmutacin efectivo ERR_EFF, partiendo del punto de conmutacin DB, antes de que la salida Y_POS (Y_NEG) se ponga de nuevo a "0". La dependencia entre Y_POS e Y_NEG con el valor de conmutacin efectivo ERR_EFF y los parmetros DB e HYS se explica en la figura Principio del regulador de tres puntos, p. 537. El valor del parmetro HYS se ajusta tpicamente al 0.5 % del rango de regulacin mximo (mx. (SP - PV)).
Nota: Mediante la histresis HYS se evala el valor.
33002250
537
THREE_STEP_CON1: Regulador de tres puntos de a pasos
Comportamiento en el caso de constante de tiempo errnea
Si la constante de tiempo TI = 0 o la amplificacin GAIN 0 (error en la proyeccin), el bloque se procesar a pesar de todo. No obstante, la funcin de la realimentacin se desconectar para que el bloque funcione como un conmutador de tres puntos normal. Si la constante de tiempo T_PROC = 0 (error en la proyeccin), el bloque se procesar de todas formas. En este caso, se ajustar para T_PROC un valor predeterminado de T_PROC = 60 s (60 000 ms).
Modalidades de servicio
Existen dos modalidades de servicio que se eligen a travs de la entrada R.
Modalidad de servicio
Automtico Reset
R
0 1
Significado
El bloque de funcin se procesar tal y como se ha descrito anteriormente. El valor interno de la unidad de realimentacin se ajustar a SP - PV. Las salidas Y_POS e Y_NEG se pondrn a "0".
Error de tiempo de ejecucin
Aviso de error Advertencia
Si HYS > 2 * DB, se genera un mensaje de error. En los siguientes casos aparecer una advertencia:
Si ...
GAIN 0 TI = 0 T_PROC = 0
Entonces ...
El regulador funciona sin realimentacin. El regulador funciona sin realimentacin. El regulador funciona con un valor predeterminado de T_PROC = 60 s.
538
33002250
TOTALIZER: Integrador
60
Vista general
Introduccin Contenido:
Este captulo describe el bloque TOTALIZER. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Frmulas Descripcin detallada Error de tiempo de ejecucin
Pgina
540 541 542 543 547
33002250
539
TOTALIZER: Integrador
Descripcin breve
Descripcin de la funcin
Este mdulo de funcin contiene el valor de la entrada IN (normalmente un caudal volumtrico) hasta que se alcance un valor lmite regulable, (normalmente un volumen). Como parmetros adicionales se pueden proyectar EN y ENO.
Nota: Al utilizar la entrada de habilitacin EN es preciso tener en cuenta las siguientes observaciones: Cuando no se ha ejecutado el mdulo durante un espacio prolongado de tiempo porque la entrada de habilitacin EN se encuentra en FALSE, se ampla el tiempo de ejecucin del mdulo Totalizar en la siguiente llamada. La superacin del timeout de temporizador Watchdog ajustado puede suponer la detencin del PLC. Como ayuda se recomienda no utilizar la entrada de habilitacin o establecerla en TRUE, de manera que se procese el mdulo en todos los ciclos.
Propiedades
El mdulo de funcin posee las siguientes propiedades: La integracin puede suspenderse temporalmente y reiniciarse. Dispositivo que permite tener en cuenta tambin los valores de entrada muy pequeos. Punto de desconexin por debajo del cual ya no se tienen en cuenta los valores de IN. Utilizacin en la modalidad "Funcionamiento decremental": la salida OUT desciende desde el valor umbral hasta cero (inc_dec = 1)
540
l l l l
33002250
TOTALIZER: Integrador
Representacin
Smbolo
Representacin del bloque
TOTALIZER
REAL Mode_TOTALIZER Para_TOTALIZER REAL BOOL
IN MODE PARA TR_I TR_S
OUT INFO STATUS
REAL Info_TOTALIZER WORD
Descripcin de parmetros TOTALIZER
Descripcin de los parmetros del bloque
Parmetros
IN MODE PARA TR_I TR_S OUT INFO STATUS
Tipo de datos
REAL Mode_TOTALIZER Para_TOTALIZER REAL BOOL REAL Info_TOTALIZER WORD
Significado
Magnitud numrica a integrar (slo si > 0) Modalidades de servicio Parmetros Entrada de inicializacin de outc Comando de inicializacin Resultado de la integracin de IN (limitado a thld) Informacin adicional generada por el bloque de funcin Palabra de estado
Descripcin de parmetros Mode_ TOTALIZER
Descripcin de la estructura de datos
Elemento
hold rst
Tipo de datos
BOOL BOOL
Significado
"1": Suspensin de la integracin "1": Restauracin del bloque de funcin
Descripcin de parmetros Para_ TOTALIZER
Descripcin de la estructura de datos
Elemento
thld cutoff inc_dec
Tipo de datos
REAL REAL BOOL
Significado
Umbral integral de IN Punto de desconexin ( 0) "1" : Funcionamiento decremental "0" : Funcionamiento normal
33002250
541
TOTALIZER: Integrador
Descripcin de parmetros Info_TOTALIZER
Descripcin de la estructura de datos
Elemento
outc cter done
Tipo de datos
REAL UINT BOOL
Significado
Resultado total de la integracin de IN Contador para la integracin "1" : La salida OUT ha alcanzado el nivel de integracin thld
Frmulas
Clculo de la salida OUT
En cada ejecucin se calcular la salida OUT de acuerdo con la siguiente frmula:
OUT (new ) = OUT(old) + IN T
Si OUT supera el nivel thld: el contador cter se incrementa: cter = cter + 1
Explicacin de las magnitudes de las frmulas
Entrega de los resultados de la integracin
542
l l
el nivel thld se resta de la salida: OUT = OUT thld
Significado de las magnitudes de las frmulas arriba mencionadas:
Magnitud Significado
tiempo transcurrido desde la ltima ejecucin del bloque valor de la salida OUT al finalizar la anterior ejecucin del regulador
T OUT(old)
Teniendo en cuenta este principio, el bloque de funcin puede entregar tres resultados de la integracin:
Resultado
Acumulador parcial OUT cter Acumulador (outc)
Explicacin
indica el resultado de la integracin de la entrada IN a partir de la ltima vez que rebas el nivel. Frecuencia con que se ha alcanzado el nivel corresponde al resultado de la integracin de la entrada IN desde que empez el clculo de la integracin. Este contador se actualiza en cada ejecucin de acuerdo con la siguiente frmula:
outc = thld cter + OUT
33002250
TOTALIZER: Integrador
Descripcin detallada
Ajuste del nivel de integracin thld
El valor del nivel de integracin corresponde en general a un propiedad del proceso fcil de determinar (p. ej., el contenido de un depsito). El bloque de funcin tambin puede utilizarse para la integracin de pequeos valores de entrada, incluso en los casos en los que el resultado de la integracin sea muy grande. En este caso existe el riesgo de que los valores de la integracin varen mucho respecto al valor total y, por tanto, no se tengan en cuenta. La solucin que ofrece TOTALIZER consiste en limitar el acumulador OUT al nivel thld, de forma que el valor de integracin nunca sea despreciable en comparacin con el acumulador parcial. El resultado de la integracin completa (outc) tambin se calcular: el regulador almacena la frecuencia con que se alcanza el nivel thld en el acumulador OUT. Si el valor del nivel thld es 0, no se calcular el valor de integracin y las salidas quedarn bloqueadas.
Otras caractersticas
En cuanto la salida OUT rebase el valor del nivel thld, la salida done se pondr a 1. La prxima vez que se ejecute este bloque de funcin, se volver a ajustar a cero. Si el contador cter alcanza su valor mximo (65535), este valor ya no se modificar. Las salidas OUT y done seguirn funcionando teniendo en cuenta el nivel de thld, pero la salida outc y el contador cter ya no podrn utilizarse. Los valores negativos de la entrada IN nunca se tienen en cuenta porque siempre estn por debajo del punto de desconexin cutoff.
33002250
543
TOTALIZER: Integrador
Diagrama de ciclos
Diagrama de ciclos del bloque TOTALIZER
OUT thld
td cter cter=cter+1 cter=cter+1
done
done=1
done=1
outc
3 x thld 2 x thld thld
td Duracin
544
33002250
TOTALIZER: Integrador
Modalidades de servicio
El bloque de funcin TOTALIZER tiene tres modalidades de servicio individuales: Tracking, Reseteado y Detenido:
Modalidad de servicio
Tracking
Parmetros
TR_S = 1
Significado
El parmetro TR_I se enva a outc y los parmetros OUT y cter se ajustan de acuerdo con la ecuacin: outc= thld x cter + OUT. La modalidad de servicio Tracking permite una nueva sincronizacin de las salidas del regulador para el proceso de regulacin (por ejemplo, porque ha fallado un sensor). Las salidas OUT, outc, cter y done se ajustan a cero. El reseteado mediante rst permite volver a empezar desde el punto cero (por ejemplo, despus de un desfase en la produccin). La integracin se suspende. Las salidas conservan sus anteriores valores.
Reset
rst = 1
Detenido
hold = 1
Nota: Si se activan al mismo tiempo las entradas TR_S, rst y hold, la modalidad de servicio Tracking tendr preferencia sobre las dems, y Reseteado sobre Detenido.
33002250
545
TOTALIZER: Integrador
Funcionamiento decremental (nc_dec = 1)
Representacin del principio de funcionamiento
OUT
thld
td cter cter=cter+1 cter=cter+1
done
done=1
done=1
outc
3 x thld 2 x thld thld
td Duracin
En la modalidad de servicio Tracking (TR_S = 1), el parmetro TR_I se enva a outc y los parmetros OUT y cter se ajustan de acuerdo con la ecuacin: outc = thld x cter + (thld -OUT). outc se calcula con la siguiente frmula: outc = thld x cter + (thld -OUT)
Principio del funcionamiento decremental
Rige el siguiente principio de funcionamiento:
Paso
1 2
Accin
Durante la primera ejecucin y si el flanco en rst es positivo, la salida OUT se inicializar a thld. A continuacin, en cada ejecucin se calcular la salida OUT de acuerdo con la siguiente frmula:
OUT(new) = OUT( old) IN T
3 En cuanto la salida OUT sea negativa, pasar lo siguiente: El contador cter se incrementar: cter = cter + 1 El nivel thld se aadir a la salida OUT: OUT = OUT + thld done se pondr a 1
33002250
546
l l l
TOTALIZER: Integrador
Error de tiempo de ejecucin
Palabra de estado
En la palabra de estado se visualizan los siguientes mensajes:
Bit
Bit 0 = 1 Bit 1 = 1 Bit 2 = 1 Bit 3 = 1 Bit 4 = 1 Bit 6 = 1
Significado
Error en un clculo de valores con coma flotante Deteccin de un valor no permitido en una de las entradas de valores con coma flotante Divisin por cero en un clculo de valores con coma flotante Desbordamiento de capacidad en un clculo de valores con coma flotante La entrada TR_I o uno de los parmetros thld o cutoff son negativos: para el clculo, el regulador utiliza el valor 0. El contador cter ha alcanzado su valor mximo (65535): cter permanecer bloqueado en este valor y la salida outc ya no es significativa. No obstante, las salidas OUT y done se pueden seguir utilizando.
Aviso de error
Aparecer un error de tiempo de ejecucin si se detecta en una entrada un valor no flotante, o si surge un problema en un clculo de valores con coma flotante. En este caso, las salidas OUT, outc, cter y done no cambiarn. En los siguientes casos se emitir una advertencia:
Si ...
thld < 0 cutoff < 0 cter = 65535
Advertencia
Entonces ...
el regulador utiliza el valor 0 para el clculo. el regulador utiliza el valor 0 para el clculo. cter permanece bloqueado en este valor y la salida outc ya no es significativa. A pesar de ello, las salidas OUT y done se pueden seguir utilizando.
33002250
547
TOTALIZER: Integrador
548
33002250
TWOPOINT_CON1: Regulador de dos puntos
61
Vista general
Introduccin Contenido:
Este captulo describe el bloque TWOPOINT_CON1. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
550 551 552 554
33002250
549
TWOPOINT_CON1: Regulador de dos puntos
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin reproduce un regulador de dos puntos que, mediante dos realimentaciones dinmicas, recibe un comportamiento similar a un PID. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin TWOPOINT_CON1 tiene las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Dos realimentaciones internas (retardador de primer orden)
550
l l
33002250
TWOPOINT_CON1: Regulador de dos puntos
Representacin
Smbolo
Representacin del bloque
TWOPOINT_CON1
BOOL BOOL REAL REAL REAL TIME TIME REAL REAL BOOL
MAN HALT SP PV K LAG_NEG LAG_POS DB XF_MAN YMAN
Y ERR_EFF
BOOL REAL
Descripcin de parmetros
Descripcin de los parmetros del bloque
Parmetros
MAN HALT SP PV K LAG_NEG LAG_POS DB XF_MAN YMAN Y ERR_EFF
Tipo de datos
BOOL BOOL REAL REAL REAL TIME TIME REAL REAL BOOL BOOL REAL
Significado
"1" = Modalidad de servicio Manual "1" = Modalidad de servicio Detenido Entrada de valor terico Entrada de valor real Amplificacin de la realimentacin Constante de tiempo de la realimentacin rpida Constante de tiempo de la realimentacin lenta Histresis del conmutador de dos puntos Valor de reseteado de la realimentacin en % (desde 0 hasta 100) "1" = Valor manual para ERR_EFF "1" = Salida de la magnitud de posicionado Valor efectivo de conmutacin
33002250
551
TWOPOINT_CON1: Regulador de dos puntos
Descripcin detallada
Estructura del regulador
Estructura del regulador de dos puntos:
Y ERR_EFF SP
+ + -
PV
xf
+ -
xf1
GAIN G ( s ) = ---------------------------------------------1 + LAG_NEG s
xf2
GAIN G ( s ) = --------------------------------------------1 + LAG_POS s
552
33002250
TWOPOINT_CON1: Regulador de dos puntos
Principio del regulador de dos puntos
Al autntico regulador de dos puntos se le aaden dos realimentaciones dinmicas (unidades PT1). Gracias a una eleccin apropiada de la constante de tiempo de estas unidades de realimentacin, el regulador de dos puntos tiene un comportamiento dinmico que corresponde al de un regulador PD. Principio del regulador de dos puntos:
Y ERR_EFF SP
+ + 0 1
PV Xf DB ERR_EFF
Deber seleccionarse una amplificacin de la realimentacin K mayor que cero. Para XF_MAN (significado entre 0 y 100%) debern indicarse valores entre 0 y 100.
Realimentaciones internas
El juego de parmetros de realimentacin, compuesto de la amplificacin de la realimentacin K y las constantes de tiempo de realimentacin LAG_NEG y LAG_POS, posibilita la aplicacin universal de este regulador de dos puntos. La siguiente tabla ofrece informacin ms precisa:
Realimentacin
Comportamiento de 2 puntos (sin realimentacin) Realimentacin negativa Realimentacin negativa + positiva Advertencia, debido al acoplamiento (realimentacin neg. con LAG_POS) Atencin, debido al acoplamiento (realimentacin positiva desconectada)
LAG_NEG
=0 >0 >0 =0 > LAG_POS
LAG_POS
=0 =0 > LAG_NEG >0 >0
Histresis
El parmetro DB determina la histresis de conmutacin, o sea, el valor en que se debe disminuir el valor de conmutacin efectivo ERR_EFF, partiendo del punto de conmutacin DB/2, antes de que se ajuste de nuevo la salida Y a "0". La dependencia de la salida Y con el valor de conmutacin efectivo ERR_EFF y el parmetro DB se explica en la figura "Principio del regulador de dos puntos, p. 553". El valor del parmetro DB se ajusta normalmente a 1% del rango de regulacin mximo [mx. (SP - PV)].
33002250
553
TWOPOINT_CON1: Regulador de dos puntos
Modalidades de servicio
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT:
Modalidad de servicio
Automtico Manual
MAN
0 1
HALT
0 01
Significado
El bloque de funcin se procesar tal y como se ha descrito anteriormente. La salida Y se ajusta al valor YMAN. xf1 y xf2 se calculan de acuerdo con la siguiente frmula:
GAIN xf1 = XF_MAN --------------100 GAIN xf2 = XF_MAN --------------100
Detenido 0 1 La salida Y conserva su ltimo valor. xf1 y xf2 se ajustan a GAIN * Y.
Error de tiempo de ejecucin
Aviso de error Advertencia
Si HYS > 2 * DB, se genera un mensaje de error. En los siguientes casos aparecer una advertencia:
Si ...
LAG_NEG = 0 y LAG_POS > 0
Entonces ...
El regulador funciona como si slo tuviera una realimentacin negativa con la constante de tiempo LAG_POS. El regulador funciona como si slo tuviera una realimentacin negativa con la constante de tiempo LAG_NEG. El regulador funciona sin realimentaciones internas.
LAG_POS < LAG_NEG > 0
XF_MAN < 0 o XF_MAN > 100
554
33002250
VEL_LIM: Limitador de crecimiento
62
Vista general
Introduccin Contenido:
Este captulo describe el bloque VEL_LIM. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
556 557 558 559
33002250
555
VEL_LIM: Limitador de crecimiento
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa un limitador de crecimiento con limitacin de la magnitud de posicionado. Se limita el gradiente de la magnitud de entrada IN a un valor RATE predeterminado. Adems, la salida OUT se limita mediante OUT_MAX y OUT_MIN. De esta manera, el bloque de funcin puede adaptar las seales teniendo en cuenta las limitaciones tecnolgicas de las velocidades y las posiciones finales de los actuadores. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio Tracking y Automtico Limitacin de magnitudes de posicionado en la modalidad de servicio Automtico
556
l l
33002250
VEL_LIM: Limitador de crecimiento
Representacin
Smbolo
Representacin del bloque
VEL_LIM
REAL REAL REAL REAL REAL BOOL
IN RATE OUT_MIN OUT_MAX TR_I TR_S
OUT
REAL
QMIN QMAX
BOOL BOOL
Descripcin de parmetros
Descripcin de los parmetros del bloque
Parmetros
IN RATE OUT_MIN OUT_MAX TR_I TR_S
Tipo de datos
REAL REAL REAL REAL REAL BOOL
Significado
Entrada Mxima limitacin de crecimiento Lmite inferior de posicionado Lmite superior de posicionado Entrada de inicializacin Tipo de inicializacin "1" = Modalidad de servicio Tracking "0" = Modalidad de servicio Automtico Salida "1" = La salida OUT alcanz el lmite inferior "1" = La salida OUT alcanz el lmite superior
OUT QMIN QMAX
REAL BOOL BOOL
33002250
557
VEL_LIM: Limitador de crecimiento
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin tiene lugar mediante la determinacin de la velocidad mxima de crecimiento RATE y de los lmites OUT_MAX y OUT_MIN para la salida OUT. La velocidad mxima de crecimiento indica cunto puede cambiar el valor de la salida en un segundo. Si RATE = 0, entonces OUT = IN. Los lmites OUT_MAX y OUT_MIN limitan la salida tanto hacia arriba como hacia abajo. De esta manera rige OUT_MIN OUT OUT_MAX. Si se llega a los valores lmite o si hay limitacin de la seal de salida se indicar mediante las salidas QMAX y QMIN: QMAX = 1 cuando OUT OUT_MAX QMIN = 1 cuando OUT OUT_MIN
Modalidades de servicio
558
l l
Existen dos modalidades de servicio, que se seleccionan a travs de la entrada TR_S:
Modalidad de servicio
Automtico Tracking
TR_S
0 1
Significado
Constantemente se calcula y entrega el valor actual para OUT. El valor de Tracking TR_I se transmite de forma fija a la salida OUT. No obstante, la salida de posicionado se limita mediante OUT_MAX y OUT_MIN.
33002250
VEL_LIM: Limitador de crecimiento
Ejemplo
Representacin del comportamiento dinmico del bloque de funcin VEL_LIM
OUT_MAX
IN OUT
OUT_MIN
1 0 1 0
QMAX QMIN
Al salto en la entrada IN le sigue el bloque de funcin con su velocidad de modificacin mxima. Tambin se puede ver claramente la limitacin de la salida OUT mediante OUT_MAX y OUT_MIN con las correspondientes seales QMAX y QMIN.
Error de tiempo de ejecucin
Aviso de error
En OUT_MAX < OUT_MIN se efecta un aviso de error.
33002250
559
VEL_LIM: Limitador de crecimiento
560
33002250
VLIM: Limitador de crecimiento de primer orden
63
Vista general
Introduccin Contenido:
Este captulo describe el bloque VLIM. Este captulo contiene los siguiente apartados:
Apartado
Descripcin breve Representacin Descripcin detallada Error de tiempo de ejecucin
Pgina
562 563 564 565
33002250
561
VLIM: Limitador de crecimiento de primer orden
Descripcin breve
Descripcin de funcionamiento
El bloque de funcin representa un limitador de crecimiento de primer orden con limitacin de la magnitud de posicionado. La salida Y sigue a la entrada X, pero con el mximo gradiente rate. Adems, la salida Y se limita mediante ymax e ymin. De esta manera, el bloque de funcin puede adaptar las seales teniendo en cuenta las limitaciones tecnolgicas de las velocidades y las posiciones finales de los actuadores. Se pueden proyectar EN y ENO como parmetros adicionales.
Propiedades
El bloque de funcin dispone de las siguientes propiedades: Modalidades de servicio: Manual, Detenido, Automtico Limitacin de magnitudes de posicionado
562
l l
33002250
VLIM: Limitador de crecimiento de primer orden
Representacin
Smbolo
Representacin del bloque
VLIM
REAL Mode_MH Para_VLIM REAL
X MODE PARA YMAN
Y STATUS
REAL Stat_MAXMIN
Descripcin de parmetros VLIM
Descripcin de los parmetros del bloque
Parmetros
X MODE PARA YMAN Y STATUS
Tipo de datos
REAL Mode_MH Para_VLIM REAL REAL Stat_MAXMIN
Significado
Entrada Modalidades de servicio Parmetros Valor de posicionado manual Salida Estado de la salida Y
Descripcin de parmetros Mode_VLIM
Descripcin de la estructura de datos
Elemento
man halt
Tipo de datos
BOOL BOOL
Significado
"1": Modalidad manual "1": Modalidad de servicio Detenido
Descripcin de parmetros Para_VLIM
Descripcin de la estructura de datos
Elemento
rate ymax ymin
Tipo de datos
REAL REAL REAL
Significado
Velocidad de crecimiento mxima (x / s mxima) Lmite superior de posicionado Lmite inferior de posicionado
Descripcin de parmetros Stat_MAXMIN
Descripcin de la estructura de datos
Elemento
qmax qmin
Tipo de datos
BOOL BOOL
Significado
"1" = Y alcanz el lmite de posicionado superior "1" = Y alcanz el lmite de posicionado inferior
33002250
563
VLIM: Limitador de crecimiento de primer orden
Descripcin detallada
Parametrizacin
La parametrizacin del bloque de funcin tiene lugar mediante la determinacin de la velocidad mxima de crecimiento rate y de los lmites ymax e ymin para la salida Y. La velocidad mxima de crecimiento indica cunto puede cambiar el valor absoluto de la salida en un segundo. La cantidad se evaluar por medio del parmetro rate.
rate en casos especiales = 0 Limites de posicionado
Si ha proyectado rate=0, la salida Y sigue inmediatamente a la entrada X (Y=X).
Los valores ymax e ymin limitan la salida tanto hacia arriba como hacia abajo. De esta forma rigen ymin Y ymax. Si se llega a los valores lmite o si hay limitacin de la seal de salida se indicar mediante las salidas qmax y qmin: qmax = 1 si Y ymax qmin = 1 si Y ymin
Modalidades de servicio
564
l l
Existen tres modalidades de servicio que se seleccionan a travs de las entradas MAN y HALT:
Modalidad de servicio
Automtico Manual
MAN
0 1
HALT
0 01
Significado
Constantemente se calcula y entrega el valor actual para Y. El valor manual YMAN se transmite de forma fija a la salida Y. Pero la salida de posicionado se limita, no obstante, a travs de ymax e ymin. La salida Y se mantendr en el ltimo valor. La salida ya no se modificar, pero el usuario la podr sobrescribir.
Detenido
33002250
VLIM: Limitador de crecimiento de primer orden
Ejemplo
Representacin del comportamiento dinmico del bloque de funcin VLIM
ymax
X Y
ymin 1 0 1 0 1 0 qmax qmin halt
Al salto en la entrada X le sigue el bloque de funcin con su velocidad de modificacin mxima (rate). Durante el modo de servicio detenido, la salida Y se detiene, para luego continuar a partir del punto en el que se detuvo. Tambin es fcil de reconocer la limitacin de la salida Y mediante ymax e ymin con sus mensajes correspondientes.
Error de tiempo de ejecucin
Aviso de error
Se generar un aviso de error si: hay un nmero de coma flotante no permitido en la entrada YMAN o X, ymax es < ymin.
33002250
l l
565
VLIM: Limitador de crecimiento de primer orden
566
33002250
Glosario
Advertencia
Si durante el procesamiento de un FFB o de un paso se detecta un estado crtico (p. ej., valores de entrada crticos o rebasamiento del lmite de tiempo), se generar una advertencia que se puede ver con el comando de men Online Indicacin de eventos.... En el caso de los FFB, la salida ENO permanece en "1". Ajustes que establecen la forma en que se va a transferir la informacin desde el equipo de programacin al PLC.
Ajustes de la transferencia de datos ANL_IN
ANL_IN representa el tipo de datos "entrada analgica" y se utiliza para el procesado de valores analgicos. Las referencias 3x del mdulo de entrada analgica configurado definidas en la lista de componentes E/S se asignan automticamente al tipo de datos y, por eso, slo pueden estar ocupadas por Unlocated Variables. ANL_OUT representa el tipo de datos "salida analgica" y se utiliza para el procesado de valores analgicos. Las referencias 4x del mdulo de salida analgica configurado definidas en la lista de componentes E/S se asignan automticamente al tipo de datos y, por eso, slo pueden estar ocupadas por Unlocated Variables. En la presente versin, "ANY" incluye los tipos de datos elementales BOOL, BYTE, DINT, INT, REAL, UDINT, UINT, TIME y WORD, as como los tipos de datos derivados de ellos. En la presente versin, "ANY_BIT" incluye los tipos de datos BOOL, BYTE y WORD.
567
ANL_OUT
ANY
ANY_BIT
33002250
Glosario
ANY_ELEM
En la presente versin, "ANY_ELEM" incluye los tipos de datos BOOL, BYTE, DINT, INT, REAL, UDINT, UINT, TIME y WORD. En la presente versin, "ANY_INT" incluye los tipos de datos DINT, INT, UDINT y UINT. En la presente versin, "ANY_NUM" incluye los tipos de datos DINT, INT, REAL, UDINT y UINT. En la presente versin, "ANY_REAL" incluye el tipo de datos REAL. Significa lo mismo que parmetro actual. El controlador basado en PC se encuentra en una platina AT estndar y se puede utilizar dentro de un equipo central en un slot de bus ISA. El mdulo dispone de una placa madre (necesita el controlador SA85) con dos slots para tarjetas PC104. Una de estas tarjetas PC104 se utiliza como CPU y la otra, como controlador INTERBUS.
ANY_INT
ANY_NUM
ANY_REAL Argumento Atrium
Base de datos del proyecto Biblioteca
Base de datos del equipo de programacin que contiene la informacin de configuracin para un proyecto. Coleccin de objetos de software previstos para reutilizarlos al programar nuevos proyectos, o incluso para formar nuevas bibliotecas. Como ejemplos se pueden citar las bibliotecas tipos de mdulos de funcin elementales. Las bibliotecas EFB se pueden subdividir en grupos. El estado 1/0 de los bits de entrada se controla mediante los datos de proceso que llegan a la CPU desde un dispositivo de entrada.
Nota: La x que aparece detrs de la primera cifra del tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos del usuario, por ejemplo, la referencia 100201 significa un bit de entrada en la direccin 201 de la memoria de seal.
Bits de entrada (referencias 1x)
Bits de estado
Existe un bit de estado para cada participante con entrada global o entrada/salida especfica de datos Peer Cop. Si se ha transferido con xito un grupo definido de datos dentro del timeout establecido, el bit de estado correspondiente pasar a 1. En caso contrario, este bit pasar a 0 y se borrarn todos los datos pertenecientes a este grupo (a 0).
33002250
568
Glosario
Bits de salida/ marca (referencias 0x)
Un bit de salida/marca se puede utilizar para controlar los datos de salida reales mediante una unidad de salida del sistema de control o para definir una o varias salidas binarias en la memoria de seal. Nota: La x que aparece detrs de la primera cifra del tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos del usuario, por ejemplo, la referencia 000201 significa un bit de salida o marca en la direccin 201 de la memoria de seal. Una bobina es un elemento LD que transmite, sin modificarlo, el estado de la conexin horizontal de su izquierda a la conexin horizontal de su derecha. Al hacerlo, el estado se guarda en la variable/direccin directa correspondiente. BOOL indica el tipo de datos "booleario". La longitud de los elementos de datos es de 1 bit (en la memoria se guarda en 1 byte). El rango de valores para las variables de este tipo de datos es 0 (FALSE) y 1 (TRUE). BYTE indica el tipo de datos "secuencia de bits 8". La entrada se efecta en forma de literal de base 2, literal de base 8 o literal de base 16. La longitud de los elementos de datos es de 8 bits. A este tipo de datos no se le puede asignar un rango de valores numrico.
Bobina
BOOL
BYTE
Ciclo del programa Cdigo de seccin Cdigo DFB
Un ciclo del programa se compone de la carga de las entradas, el procesamiento de la lgica del programa y la entrega de las salidas. El cdigo de seccin es el cdigo ejecutable de una seccin. El tamao del cdigo de seccin depende principalmente de la cantidad de mdulos de la seccin. El cdigo DFB constituye el cdigo DFB ejecutable de una seccin. El tamao del cdigo DFB depende principalmente de la cantidad de mdulos de una seccin. El cdigo EFB es el cdigo ejecutable de todos los EFB utilizados. Entre ellos se encuentran tambin los EFB dentro de DFBs. Conexin de control o de flujo de datos entre objetos grficos (p. ej., pasos en el editor de SFC o mdulos de funcin en el editor de FBD) dentro de una seccin representada grficamente como una lnea. La conexin de red local es la red que conecta al participante local con otros participantes, ya sea directamente o mediante amplificador de bus.
Cdigo EFB
Conexin
Conexin local (Local Link)
33002250
569
Glosario
Conexiones binarias Conexiones serie Constantes
Conexiones entre salidas y entradas de FFBs del tipo de datos BOOL.
En las conexiones serie (COM) se transfiere la informacin bit a bit.
Las constantes son Unlocated Variables a las que se ha asignado un valor que la lgica del programa no puede modificar (protegido contra escritura). Un contacto es un elemento LD que transmite un estado a la conexin horizontal de su derecha. Este estado se obtiene del vnculo booleario AND entre el estado de la conexin horizontal de la izquierda y el estado de la variable/direccin directa correspondiente. Un contacto no modifica el valor de la variable/direccin directa correspondiente. El contador de funciones sirve para identificar inequvocamente una funcin en un programa o DFB. El contador de funciones no se puede editar y se asigna automticamente. El contador de funciones tiene siempre la estructura: .n.m n = nmero de la seccin (nmero correlativo) m = nmero del objeto FFB dentro de la seccin (nmero correlativo)
Contacto
Contador de funciones
Creacin de instancias
Creacin de una instancia.
Datos de instancia DFB Datos de seccin
Los datos de instancia DFB son datos internos de los mdulos de funcin utilizados en el programa. Son los datos locales de una seccin, como por ejemplo literales, conexiones entre mdulos, salidas y entradas de mdulos no conectados, as como la memoria de estado interna de EFBs.
Nota: Los datos que aparecen en los DFB de esta seccin no son datos de seccin.
Datos globales
Los datos globales son Unlocated Variables.
570
33002250
Glosario
DDE (Dynamic Data Exchange) Intercambio de datos dinmico
La interfase DDE permite el intercambio de datos dinmico entre dos programas que se ejecuten bajo Windows. El usuario puede utilizar la interfase DDE en el monitor ampliado para ejecutar sus propias aplicaciones de visualizacin. Con esta interfase, el usuario (es decir, el cliente DDE) no slo puede leer los datos del monitor ampliado (el servidor DDE), sino tambin escribir datos en el PLC a travs del servidor. El usuario puede as modificar datos directamente en PLC, mientras verifica y analiza los resultados. Utilizando esta interfase, el usuario puede crear su propia "Graphic-Tool", "Face Plate" o "Tuning Tool" e integrarlas en el sistema. Estas herramientas se pueden escribir en cualquier lenguaje que DDE pueda interpretar, p. ej., Visual Basic o Visual C++. Las herramientas se ejecutan cuando el usuario pulsa uno de los botones del cuadro de dilogo Monitor ampliado. Concept-Graphic-Tool: Mediante la conexin DDE entre Concept y la Herramienta Grfica Concept se pueden representar las seales de una configuracin como cronograma. Mecanismo para establecer la definicin de un elemento de lenguaje. Normalmente, una declaracin incluye la conexin de un identificador con un elemento de lenguaje y la asignacin de atributos como tipos de datos y algoritmos. La desfragmentacin elimina huecos indeseados (generados, por ejemplo, al borrar variables no utilizadas) en la memoria. Un mdulo de funcin derivado representa la llamada de un tipo de mdulo de funcin derivado. Encontrar ms detalles acerca de la forma grfica de la llamada en la definicin de "mdulo de funcin (instancia)". A diferencia de las llamadas de los tipos EFB, las llamadas de los tipos DFB se identifican mediante lneas verticales dobles en la parte derecha e izquierda del smbolo de bloque rectangular. El cuerpo de un tipo de mdulo de funcin derivado se disea en el lenguaje FBD, lenguaje LD, lenguaje ST o en el lenguaje IL, pero slo en la versin actual del sistema de programacin. Las funciones derivadas tampoco se pueden definir an en la versin actual. Se distingue entre DFBs locales y DFBs globales. Los DFB globales estn disponibles en cada proyecto de Concept. La posicin de los DFB globales depender de los ajustes del fichero CONCEPT.INI. Los DFB locales slo estn disponibles en un nico proyecto de Concept y se guardan en el directorio DFB bajo el directorio del proyecto. DINT representa el tipo de datos "nmero entero de longitud doble (double integer)". La entrada se efecta en forma de literal entero, literal de base 2, literal de base 8 o literal de base 16. La longitud de los elementos de datos es de 32 bits. El rango de valores para las variables de este tipo de datos va desde -2 exp (31) hasta 2 exp (31) -1.
Declaracin
Desfragmentacin DFB (Derived Function Block) mdulo de funcin derivado
DFB globales
DFB locales
DINT
33002250
571
Glosario
Direccin de participante
La direccin de participante sirve para identificar sin posibilidad de confusin a un participante de red en la ruta de acceso. La direccin se configura directamente en el participante, p. ej., mediante un conmutador rotativo en la parte posterior de los mdulos. Las direcciones (directas) son rangos de memoria en el PLC. Se encuentran en la memoria de seal y pueden estar asignadas a mdulos de entrada/salida. Las direcciones directas pueden indicarse (y mostrarse) en los siguientes formatos: Formato estndar (400001) Formato de separador (delimitador) (4:00001) Formato compacto (4:1) Formato IEC (QW1)
Direcciones
DP (PROFIBUS) Dummy
Elemento de lenguaje
EN/ENO (Habilitacin / Indicacin de error)
572
l l l l
DP = periferia decentral Fichero vaco compuesto por un encabezado de texto con informacin general sobre el fichero, como autor, fecha de creacin, denominacin de EFB, etc. El usuario debe completarlo por medio de otras entradas.
Cualquier elemento bsico en uno de los lenguajes de programacin IEC, por ejemplo, un paso en SFC, una instancia de mdulo de funcin en FBD o el valor inicial de una variable. Si el valor de EN es "0", cuando se ejecute el FFB no se ejecutarn los algoritmos definidos mediante el FFB, y todas las salidas conservarn su valor anterior. En este caso, el valor de ENO se ajustar automticamente a "0". Si el valor de EN es "1", cuando se ejecute el FFB se ejecutarn los algoritmos definidos mediante el FFB. Una vez que se hayan ejecutado estos algoritmos sin errores, el valor de ENO se ajustar automticamente a "1". Si se produce un error durante la ejecucin de estos algoritmos, ENO pasar a "0" automticamente. El comportamiento de salida de los FFB no depende de si los FFB se han ejecutado sin EN/ENO o con EN=1. Si est activada la visualizacin de EN/ENO, habr que conectar obligatoriamente la entrada EN. De no ser as, no se ejecutar el FFB. La configuracin de EN y ENO se activa y desactiva en el cuadro de dilogo de las propiedades de los mdulos. Este cuadro de dilogo se abre con los comandos de men Objetos Propiedades... o haciendo doble clic en el FFB.
33002250
Glosario
Equipo de programacin
Hardware y software que permiten programar, configurar, probar, poner en marcha y buscar errores tanto en las aplicaciones de PLC como en las aplicaciones de sistema decentrales para hacer posible la documentacin y el archivado de la fuente. En determinadas circunstancias, el equipo de programacin se puede utilizar tambin para la visualizacin de procesos. Si durante el procesamiento de un FFB o de un paso se detecta un error (p. ej., valores de entrada no permitidos o un error de tiempo), se generar un mensaje de error que se puede ver con el comando de men Online Indicacin de eventos.... En el caso de los FFB, la salida ENO se ajustar a "0". Errores que se producen durante el procesamiento del programa en el PLC en objetos SFC (p. ej., pasos) o en FFBs. Estos errores pueden ser, por ejemplo, desbordes del rango de valores en contadores o errores de tiempo en pasos. Con un procesador de control distribuido (D908) puede instalar una red descentralizada con un PLC de rango superior. Si se utiliza un D908 con un PLC descentralizado, el PLC de rango superior considerar al PLC descentralizado como una estacin de E/S descentralizada. El D908 y el PLC descentralizado se comunican a travs de un bus de sistema, lo que proporciona un alto rendimiento con una mnima repercusin en el tiempo de ciclo. El intercambio de datos entre el D908 y el PLC de rango superior se efecta a 1,5 megabits por segundo a travs del bus de E/S descentralizado. Un PLC de rango superior puede trabajar hasta con 31 procesadores D908 (direccin 2-32). Proceso por el cual se averigua el valor de una funcin o de las salidas de un mdulo de funcin durante la ejecucin del programa. Las expresiones estn compuestas por operadores y operandos.
Error
Error de tiempo de ejecucin
Estacin de E/S DCP
Evaluacin
Expresin
FFB (funciones/ mdulos de funcin) Fichero de cdigo fuente (EFB Concept)
Trmino colectivo para EFB (funciones elementales/mdulos de funcin elementales) y DFB (mdulos de funcin derivados)
El fichero de cdigo fuente es un fichero de fuente C++ convencional. Tras ejecutar el comando de men Biblioteca Generar ficheros, este fichero dispondr de un cuadro de cdigos de EFB en el que deber introducir un cdigo especfico para el EFB seleccionado. Para ello, ejecute el comando de men Objetos Fuente.
33002250
573
Glosario
Fichero de copia de seguridad (EFB Concept)
El fichero de copia de seguridad es una copia del ltimo fichero de cdigo fuente. El nombre de este fichero de copia de seguridad es "backup??.c" (se supone que no tiene ms de 100 copias del fichero de cdigo fuente). El primer fichero de copia de seguridad tiene el nombre "backup00.c". Si ha realizado modificaciones en el fichero de definicin que no provoquen cambios en la interfase en caso de EFBs, podr ahorrarse la creacin del fichero de copia de seguridad editando el fichero de cdigo fuente (Objetos Fuente). Si crea un fichero de copia de seguridad, puede asignarle el nombre del fichero fuente. El fichero de definicin contiene informacin descriptiva general sobre el EFB seleccionado y sus parmetros formales.
Fichero de definicin (EFB Concept) Fichero de modelo (EFB Concept) Fichero de prototipo (EFB Concept) Filtro FIR Filtro IIR Formato compacto (4:1) Formato de separador (delimitador) (4:00001) Formato estndar (400001) Formato IEC (QW1)
El fichero de modelo es un fichero ASCII con informacin de diseo para el editor de FBD Concept y los parmetros para la generacin de cdigos.
El fichero de prototipo contiene todos los prototipos de las funciones asignadas. A continuacin, si la hay, se indicar una definicin de tipo de la estructura de estado interna. (Finite Impulse Response Filter) Filtro con respuesta de impulsos finita (Infinite Impulse Response Filter) Filtro con respuesta de impulsos infinita La primera cifra (la referencia) se separa de la siguiente direccin mediante dos puntos (:) sin poner en la direccin los ceros a la izquierda. La primera cifra (la referencia) se separa mediante dos puntos (:) de las siguientes cinco posiciones de la direccin.
Justo detrs de la primera cifra (la referencia) est la direccin de cinco posiciones.
En la primera posicin de la direccin hay un identificador conforme a IEC, seguido de la direccin de cinco posiciones: %0x12345 = %Q12345 %1x12345 = %I12345 %3x12345 = %IW12345 %4x12345 = %QW12345
574
l l l l
33002250
Glosario
Funcin (FUNK)
Unidad organizativa del programa que proporciona exactamente un elemento de datos en la ejecucin. Una funcin no tiene informacin interna de estado. Si se ejecuta varias veces la misma funcin con los mismos valores en los parmetros de entrada, se obtienen siempre los mismos valores de salida. Encontrar ms detalles acerca de la forma grfica de las llamadas de funciones en la definicin de "mdulo de funcin (instancia)". A diferencia de las llamadas a mdulos de funcin, las llamadas a funciones slo tienen una nica salida sin nombre, ya que ste coincide con el nombre de la funcin. En FBD, cada llamada se identifica mediante un nmero inequvoco que le asigna el bloque grfico; este nmero se genera de forma automtica y no se puede modificar. Denominacin de las funciones o losmdulos de funcin cuyas definiciones de tipos no han sido formuladas en uno de los lenguajes IEC, es decir, el cuerpo de las definiciones no se puede modificar con el editor DFB (DFB Concept), por ejemplo. Los tipos de EFB se programan en "C" y estn disponibles mediante bibliotecas en la forma previa a la compilacin.
Funciones y mdulos de funcin elementales (EFB)
Grupos (EFB)
Algunas bibliotecas de EFB (p. ej., la biblioteca IEC) estn subdivididas en grupos. Esto facilita la localizacin de los EFB, sobre todo en las bibliotecas de grandes dimensiones.
Horizontal
Horizontal significa que la pgina del texto impreso es ms ancha que alta.
IEC 61131-3
Norma internacional: Autmatas programables Parte 3: Lenguajes de programacin.
33002250
575
Glosario
Instruccin (IL)
Las instrucciones son los "comandos" del lenguaje de programacin IL. Cada instruccin comienza en una lnea nueva y va seguida de un operador o modificador y, si fuera necesario para la operacin en cuestin, de uno o ms operandos. Si se utilizan varios operandos, stos se separarn con comas. Antes de la instruccin puede haber una marca, que ir seguida de dos puntos (:). Si hubiera un comentario, deber ser el ltimo elemento de la lnea. Al programar los controles elctricos, el usuario deber implementar instrucciones codificadas operacionalmente en forma de objetos de imagen que estn divididos en forma de contactos reconocibles. A nivel de usuario, los objetos de programa proyectados se convierten durante el proceso de carga en cdigos operacionales utilizables por el equipo. Estos cdigos OP se descodifican en la CPU, y las funciones de firmware del controlador los procesan de tal forma que se puede implementar el control deseado. Las instrucciones son los "comandos" del lenguaje de programacin ST. Las instrucciones se deben cerrar mediante el smbolo del punto y coma. En una lnea puede haber varias instrucciones (separadas por punto y coma). INT representa el tipo de datos "nmero entero (integer)". La entrada se efecta en forma de literal entero, literal de base 2, literal de base 8 o literal de base 16. La longitud de los elementos de datos es de 16 bits. El rango de valores para las variables de este tipo de datos va desde -2 exp (15) hasta 2 exp (15) -1. Para utilizar el canal INTERBUS PCP y el pretratamiento de datos de proceso INTERBUS (PDV) se ha introducido en el configurador de Concept el nuevo tipo de estacin de E/S INTERBUS (PCP). A este tipo de estacin de E/S se le ha asignado de forma fija el mdulo de conexin INTERBUS 180-CRP-660-01. El 180-CRP-660-01 slo se diferencia del 180-CRP-660-00 en que el rango de E/S en la memoria de seal del controlador es considerablemente mayor.
Instruccin (LL984)
Instruccin (ST)
INT
INTERBUS (PCP)
Ladder Diagram (LD)
Ladder Diagram es un lenguaje de programacin grfico que cumple la norma IEC 1131 y se orienta pticamente a los "circuitos de corriente" de un esquema de contactos de rels.
576
33002250
Glosario
Ladder Logic 984 (LL)
En los trminos Ladder Logic y Ladder Diagram, la palabra Ladder (contacto) se refiere a la ejecucin. A diferencia del esquema de conexiones, en electricidad se utiliza el esquema de contactos para dibujar un circuito elctrico (con smbolos elctricos) que representa el desarrollo de los eventos, y no los cables que conectan los elementos entre s. Una interfase de usuario convencional para controlar las acciones de los dispositivos de automatizacin admite una interfase de esquema de contactos para que los tcnicos electricistas no tengan que aprender ningn lenguaje de programacin con el que no estn familiarizados para implementar un programa de control. La estructura del esquema de contactos real permite conectar los elementos elctricos de tal forma que se genere una salida de control que dependa de un flujo de corriente lgico a travs de los objetos elctricos utilizados, que representan la condicin antes exigida de un dispositivo elctrico fsico. De forma sencilla, la interfase de usuario es una pantalla de vdeo generada por la aplicacin de programacin del PLC que configura un reticulado vertical y horizontal en el que se organizan los objetos de programacin. El esquema recibe corriente por la parte izquierda del reticulado y, al unirlo con objetos que estn activos, la corriente fluye de izquierda a derecha. Los elementos de lenguaje SFC permiten subdividir una unidad organizativa de un programa de PLC en un nmero de pasos y transiciones, vinculados entres s mediante conexiones direccionales. A cada paso le corresponde un nmero de acciones, y cada transicin est vinculada a una condicin de transicin. Una o varias secciones que contienen representaciones grficas de redes de funciones, mdulos de funcin y conexiones.
Lenguaje de ejecucin (SFC)
Lenguaje de mdulo de funcin (FBD) Lista de componentes de E/S Lista de instrucciones (IL)
En la lista de componentes E/S se configuran los mdulos de E/S y expertos de las distintas unidades centrales.
IL es un lenguaje de programacin conforme a IEC 1131 en el que las operaciones como, por ejemplo, llamadas condicionales o incondicionales de mdulos de funcin y funciones, los saltos condicionales o incondicionales, etc., se representan mediante instrucciones. Los literales enteros sirven para indicar los valores enteros en el sistema decimal. Los valores pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los nmeros no son significativos. Ejemplo -12, 0, 123_456, +986
Literal entero
33002250
577
Glosario
Literal real con exponente
Los literales reales con exponente sirven para indicar los valores con coma flotante en el sistema decimal. Los literales reales con exponente se caracterizan por la indicacin del punto decimal. El exponente indica la potencia decimal por la que se debe multiplicar el nmero de partida para obtener el valor que hay que representar. La base puede ir precedida por el signo menos (-). El exponente puede ir precedido por el signo menos o ms (+/-). Los guiones bajos individuales ( _ ) situados entre los nmeros no son significativos. (Slo entre cifras y no inmediatamente delante o detrs de una coma decimal ni tampoco de "E", "E+" o "E-"). Ejemplo -1.34E-12 -1.34e-12 1.0E+6 1.0e+6 1.234E6 1.234e6
Literal tipificado
Si desea establecer usted mismo el tipo de datos de un literal, puede hacerlo con la siguiente construccin: Nombre del tipo de datos#Valor del literal. Ejemplo INT#15 (tipo de datos: entero, valor: 15), BYTE#00001111 (tipo de datos: Byte, valor: 00001111) REAL#23.0 (tipo de datos: Real, valor: 23.0) Para la asignacin del tipo de datos REAL tambin se puede indicar el valor de la siguiente forma: 23.0. Indicando una posicin de la coma se asigna automticamente el tipo de datos REAL.
Literales
Los literales sirven para proporcionar directamente valores a las entradas de FFB, las condiciones de transicin, etc. La lgica del programa no puede sobrescribir estos valores (estn protegidos contra escritura). Se distingue entre literales genricos y tipificados. Adems, los literales sirven para asignar un valor a las constantes o un valor inicial a una variable. La entrada se efecta en forma de literal de base 2, literal de base 8, literal de base 16, literal entero, literal real o literal real con exponente. Los literales de base 16 sirven para indicar valores enteros en el sistema hexadecimal. La base debe identificarse mediante el prefijo 16#. Los valores no pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los nmeros no son significativos. Ejemplo 16#F_F 16#FF (decimal 255) 16#E_0 16#E0 (decimal 224)
Literales de base 16
578
33002250
Glosario
Literales de base 2
Los literales de base 2 sirven para indicar valores enteros en el sistema dual. La base debe identificarse mediante el prefijo 2#. Los valores no pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los nmeros no son significativos. Ejemplo 2#1111_1111 2#11111111 (decimal 255) 2#1110_0000 2#11100000 (decimal 224)
Literales de base 8
Los literales de base 8 sirven para indicar valores enteros en el sistema octal. La base debe identificarse mediante el prefijo 8#. Los valores no pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los nmeros no son significativos. Ejemplo 8#3_77 8#377 (decimal 255) 8#34_0 8#340 (decimal 224)
Literales de duracin
Las unidades permitidas para la duracin (TIME) son das (D), horas (H), minutos (M), segundos (S) y milisegundos (MS) o combinaciones de ellas. La duracin se debe identificar con el prefijo t#, T#, time# o TIME#. El "desborde" de la unidad de mayor valor est permitido; por ejemplo, la entrada T#25H15M es vlida. Ejemplo t#14MS, T#14.7S, time#18M, TIME#19.9H, t#20.4D, T#25H15M, time#5D14H12M18S3.5MS
Literales genricos
Si no considera relevante el tipo de datos de un literal, indique solamente el valor para dicho literal. En este caso, Concept asignar al literal un tipo de datos adecuado de forma automtica. Los literales reales sirven para indicar los valores con coma flotante en el sistema decimal. Los literales reales se caracterizan por la indicacin del punto decimal. Los valores pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los nmeros no son significativos. Ejemplo -12.0, 0.0, +0.456, 3.14159_26
Literales reales
Llamada
Proceso por el que se inicia la ejecucin de una operacin.
33002250
579
Glosario
Located Variable
A las Located Variables se les asigna una direccin de memoria de seal (direcciones de referencia 0x, 1x, 3x, 4x). El valor de estas variables se almacena en la memoria de seal y se puede modificar online con el editor de datos de referencia. Para acceder a estas variables se puede utilizar su nombre simblico o su direccin de referencia. Todas las entradas y salidas del PLC estn conectadas a la memoria de seal. El acceso del programa a seales perifricas conectadas al PLC se efecta slo mediante Located Variables. Los accesos externos a travs de las interfases Modbus o Modbus Plus del PLC, p. ej., por parte de sistemas de visualizacin, tambin son posibles mediante Located Variables.
Macro
Las macros se crean con ayuda del software DFB Concept. Las macros sirven para duplicar las secciones y redes que se utilizan con frecuencia (incluyendo su lgica, sus variables y su declaracin de variables). Se distingue entre macros locales y globales. Las macros tienen las siguientes propiedades: Las macros slo se pueden crear en los lenguajes de programacin FBD y LD. Las macros slo contienen una nica seccin. Las macros pueden contener una seccin todo lo compleja que se desee. Desde el punto de vista tcnico, una macro para la que se ha creado un instancia, es decir, una macro insertada en una seccin, no se distingue de una seccin generada de forma convencional. Llamada de DFB en una macro Declaracin de variables Utilizacin de estructuras de datos propias de la macro Aceptacin automtica de las variables declaradas en la macro Valores iniciales para variables Creacin de mltiples instancias de una macro en todo el programa con variables diferentes El nombre de la seccin, los nombres de las variables y el nombre de la estructura de datos pueden contener hasta 10 marcas de intercambio distintas (de @0 a @9).
Macros globales
Macros locales
580
l l l l l l l l l l l
Las macros globales estn disponibles en todos los proyectos de Concept y se encuentran en el directorio DFB, justo debajo del directorio Concept. Las macros locales slo estn disponibles en un nico proyecto de Concept y se guardan en el directorio DFB bajo el directorio del proyecto.
33002250
Glosario
Memoria de programa IEC Memoria de seal
La memoria de programa IEC est compuesta por el cdigo de programa, el cdigo EFB, los datos de seccin y los datos de instancia del DFB. La memoria de seal es el espacio de memoria para todas las magnitudes a las que se accede a travs de referencias (representacin directa) en el programa de usuario. Por ejemplo, en la memoria de seal hay bits de entrada, bits de salida/ marca, palabras de entrada y palabras de salida/marca. La memoria total IEC est compuesta por la memoria de programa IEC y los datos globales. (Man-Machine-Interface) Interfase hombre-mquina American Standard Code for Information Interchange. El modo ASCII se utiliza para la comunicacin con distintos dispositivos centrales. ASCII funciona con 7 bits de datos. Remote Terminal Unit (unidad de terminal remota) El modo RTU se utiliza para la comunicacin entre el PLC y un ordenador personal compatible con IBM. RTU funciona con 8 bits de datos. Un mdulo de funcin es una unidad organizativa del programa que calcula, de acuerdo con la funcionalidad definida en la descripcin del tipo de mdulo de funcin, los valores para sus salidas y variable(s) interna(s) cuando se ejecuta como instancia determinada. Todos los valores de las salidas y variables internas de una determinada instancia de mdulo de funcin se conservan de una llamada del mdulo de funcin a la siguiente. Aunque se ejecute varias veces una misma instancia de mdulo de funcin con los mismos argumentos (valores de parmetros de entrada), no se obtendrn necesariamente los mismos valores de salida. Cada instancia de mdulo de funcin se representa grficamente mediante un smbolo de bloque rectangular. El nombre del tipo de mdulo de funcin est dentro del rectngulo, centrado en la parte superior. El nombre de la instancia del mdulo de funcin tambin est arriba, pero fuera del rectngulo. Se genera automticamente al crear una instancia, pero, en caso necesario, el usuario puede modificarlo. Las entradas se representan en la parte izquierda del bloque; las salidas, en la derecha. Los nombres de los parmetros formales de entrada/salida aparecen dentro del rectngulo, en el lugar correspondiente. La descripcin anterior de la representacin grfica tambin es aplicable en general a las llamadas de funciones y a las llamadas de DFB. En las correspondientes definiciones se indican las diferencias. El mdulo SA85 es un adaptador Modbus Plus para ordenadores IBM-AT o compatibles.
Memoria total IEC MMI Modo ASCII
Modo RTU
Mdulo de funcin (instancia) (FB)
Mdulo SA85
33002250
581
Glosario
Nombre de instancia
Identificador que pertenece a una determinada instancia de mdulo de funcin. El nombre de instancia sirve para identificar sin posibilidad de confusin un mdulo de funcin en una unidad organizativa del programa. El nombre de instancia se genera automticamente, pero se puede modificar. El nombre de instancia debe ser nico en toda la unidad organizativa del programa, en este caso no se distingue entre maysculas y minsculas. Si ya existe el nombre indicado, aparecer una advertencia y deber seleccionar otro nombre. El nombre de instancia se debe formular de acuerdo con la Nomenclatura IEC; si no, aparecer un mensaje de error. El nombre de instancia generado de manera automtica tiene siempre la estructura: FBI_n_m FBI = instancia de mdulo de funcin n = nmero de la seccin (nmero correlativo) m = nmero del objeto FFB dentro de la seccin (nmero correlativo)
Nombre del paso
El nombre del paso sirve para identificar inequvocamente a un paso dentro de una unidad organizativa del programa. El nombre del paso se genera automticamente, pero se puede modificar. El nombre del paso debe ser nico en toda la unidad organizativa del programa, si no, se generar un mensaje de error. El nombre de paso generado automticamente tiene siempre la estructura: S_n_m S = paso n = nmero de la seccin (nmero correlativo) m = nmero del paso dentro de la seccin (nmero correlativo)
Nomenclatura IEC (identificador)
Un identificador es una secuencia de letras, nmeros y guiones bajos que debe empezar por una letra o un guin bajo (p. ej., el nombre de un tipo de mdulo de funcin, una instancia, una variable o una seccin). Se pueden utilizar las letras propias de los juegos de caracteres nacionales (p. ej., , , , ), excepto en los nombres de proyecto y de DFB. Los guiones bajos son significativos en los identificadores, p. ej., "A_BCD" y "AB_CD" se interpretan como dos identificadores distintos. No se permiten varios guiones bajos iniciales ni seguidos. Los identificadores no pueden contener espacios en blanco. Las maysculas o minsculas no son significativas, p. ej., "ABCD" y "abcd" se interpretan como el mismo identificador. Los identificadores no pueden ser palabras clave.
582
33002250
Glosario
Operador
Un operador es un smbolo para una operacin boolearia o aritmtica que hay que realizar. Un operando es un literal, una variable, una llamada de funcin o una expresin.
Operando
Palabras clave
Las palabras clave son combinaciones nicas de caracteres que se utilizan como elementos sintcticos especiales tal como se define en el anexo B de la norma IEC 1131-3. Todas las palabras clave que se utilizan en la norma IEC 1131-3 y, por tanto, en Concept, aparecen enumeradas en el anexo C de la norma IEC 1131-3. Las palabras clave de esta lista no se debern utilizar para ningn otro fin, p. ej., como nombres de variables, de secciones, de instancias, etc. Una palabra de entrada contiene informacin que procede de una fuente externa y se representa mediante un nmero de 16 bits. Un registro 3x tambin puede contener 16 bits de entrada consecutivos cargados en el registro en formato binario o BCD (decimal codificado en binario). Nota: La x que aparece detrs de la primera cifra del tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos del usuario, por ejemplo, la referencia 300201 significa una palabra de entrada de 16 bits en la direccin 201 de la memoria de seal. Una palabra de salida/marca puede utilizarse para almacenar datos numricos (binarios o decimales) en la memoria de seal, o tambin para enviar los datos de la CPU a una unidad de salida del sistema de control. Nota: La x que aparece detrs de la primera cifra del tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos del usuario, por ejemplo, la referencia 400201 significa una palabra de salida o marca de 16 bits en la direccin 201 de la memoria de seal. Parmetro de entrada/salida conectado actualmente. Transmite el argumento correspondiente al ejecutar un FFB.
Palabras de entrada (referencias 3x)
Palabras de salida/marca (referencias 4x)
Parmetro actual Parmetro de entrada (entrada)
33002250
583
Glosario
Parmetro de salida (salida) Parmetros formales Participante
Parmetro con el que se devuelve el resultado o los resultados de la evaluacin de un FFB. Parmetros de entrada/salida que se utilizan dentro de la lgica de un FFB y se ejecutan como entradas/salidas desde el FFB. Un participante es una clula de programacin en una red LL984. Una clula o participante estar compuesto por una matriz del tipo 7x11, es decir, 7 filas para 11 elementos. Un participante es un dispositivo con una direccin (1 a 64) en la red Modbus-Plus.
Participante de red Participante local de red Paso
El participante local es aqul que se est configurando en este momento.
Elemento de lenguaje SFC: Situacin en la que el comportamiento de un programa sigue, en lo que respecta a sus entradas y salidas, aquellas operaciones que se han definido mediante las correspondientes acciones del paso. Primer paso de una cadena secuencial. En todas las cadenas secuenciales debe haber definido un paso inicial. La cadena secuencial se inicia con el paso inicial la primera vez que ste se ejecuta. Autmata programable (PLC) El portapapeles es una memoria temporal para objetos cortados o copiados. Estos objetos se pueden pegar en secciones. Cada vez que se vuelva a cortar o copiar, se sobrescribir el contenido anterior del portapapeles. El procesador Peer procesa los ciclos de token y el flujo de datos entre la red Modbus-Plus y la lgica de usuario PLC. Mxima unidad organizativa del programa. Un programa se cierra y se carga en un nico PLC. Un sistema redundante est compuesto por dos equipos de PLC con idntica configuracin que se comunican entre s mediante procesadores redundantes. En caso de que falle el PLC primario, el PLC secundario asume el control del mando. En condiciones normales, el PLC secundario no asume ninguna funcin de control, sino que comprueba la informacin de estado para detectar fallos.
Paso inicial
PLC Portapapeles
Procesador Peer
Programa
Programar sistema redundante (Hot Standby)
584
33002250
Glosario
Proyecto
Denominacin general del nivel superior de una estructura en rbol de un software que determina el nombre de proyecto de orden superior de una aplicacin PLC. Despus de establecer el nombre del proyecto podr guardar la configuracin del sistema y el programa de control con este nombre. Todos los datos que se originan durante la creacin de la configuracin y del programa forman parte de este proyecto de nivel superior para la tarea de automatizacin especfica. Denominacin general del conjunto completo de la informacin de programacin y planificacin en la base de datos del proyecto que representa el cdigo fuente que describe la automatizacin de una instalacin. Un puente es un dispositivo que conecta redes. Permite la comunicacin entre usuarios de las dos redes. Cada red tiene su propia secuencia de rotacin de token. El token no se transmite a travs de puentes.
Puente
REAL
REAL representa el tipo de datos "nmero con coma flotante". La entrada se efecta como literal real o como literal real con exponente. La longitud de los elementos de datos es de 32 bits. El rango de valores para variables de este tipo de datos va de +3.402823E+38 a -3.402823E+38.
Nota: Dependiendo del tipo de procesador matemtico de la CPU no ser posible representar distintas reas dentro de este rango de valores permitido. Esto ser vlido para valores que tiendan a CERO y para valores que tiendan a INFINITO. En tales casos, en la modalidad de animacin no se mostrar un valor numrico, sino NAN (Not A Number) o INF (INFinite (infinito)).
Red
Una red es la interconexin de dispositivos en un circuito de informacin comn que se comunican entre s mediante un mismo protocolo. La programacin decentral en la red Modbus Plus permite alcanzar el mximo rendimiento en la transferencia de datos sin necesidad de requisitos especiales en los vnculos. La programacin de una red decentral es muy sencilla. Para instalar la red no hace falta crear ninguna lgica adicional de esquema de contactos. Mediante las entradas correspondientes en el procesador Peer Cop se cumplen todos los requisitos para la transferencia de datos.
Red decentral (DIO)
33002250
585
Glosario
Referencia
Cada direccin directa es una referencia que comienza por una clave que indica si se trata de una entrada o una salida o de un bit o una palabra. Las referencias que empiezan con la clave 6 representan registros de la memoria extendida de la memoria de seal. Rango 0x = bits de salida/marca Rango 1x = bits de entrada Rango 3x = palabras de entrada Rango 4x = palabras de salida/marca Rango 6x = registros en la memoria extendida
Nota: La x que aparece detrs de la primera cifra de cada tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos del usuario, por ejemplo, la referencia 400201 significa una palabra de salida o marca de 16 bits en la direccin 201 de la memoria de seal.
Registro en la memoria extendida (referencia 6x) Representacin directa
Las referencias 6x son palabras de marca en la memoria extendida del PLC. Slo se pueden utilizar en programas de usuario LL984 y para utilizar una CPU 213 04 o CPU 424 02.
Mtodo para la representacin de variables en el programa PLC del que se puede derivar directamente la asignacin del lugar de almacenamiento lgico (e indirectamente el lugar de almacenamiento fsico). La E/S remota indica un lugar fsico de los dispositivos de control de puntos de E/S en relacin con el procesador que los controla. Las entradas/salidas remotas estn conectadas al dispositivo de control a travs de un cable de comunicacin.
RIO (Remote I/O)
Salto
Elemento del lenguaje SFC. Los saltos se utilizan para saltar reas de la cadena secuencial.
586
33002250
Glosario
Seccin
Una seccin se puede utilizar, por ejemplo, para describir el funcionamiento de una unidad tecnolgica, como un motor. Un programa o DFB est compuesto de una o ms secciones. Las secciones se pueden programar con los lenguajes de programacin IEC FBD y SFC. Dentro de una seccin slo se puede utilizar uno de los lenguajes de programacin mencionados. Cada seccin tiene su propia ventana de documento en Concept. Para tener una mejor visin de conjunto, es mejor dividir una seccin grande en varias ms pequeas. Para desplazarse dentro de la seccin se utiliza la barra de desplazamiento. Elemento de datos compuesto por uno o varios bits.
Secuencia de bits Smbolo (icono)
Representacin grfica de distintos objetos en Windows, p. ej., unidades de disco, programas de aplicacin y ventanas de documento. En los dispositivos de control Quantum, Concept incluye la preparacin de la asignacin de E/S para mdulos de E/S SY/MAX para el control RIO mediante el PLC Quantum. El bastidor remoto SY/MAX tiene un adaptador remoto de E/S en el slot 1 que se comunica mediante un sistema de E/S Modicon S908 R. Los mdulos de E/S SY/MAX se incluyen en la asignacin de E/S de la configuracin de Concept para marcarlos e integrarlos.
SY/MAX
Texto estructurado (ST)
ST es un lenguaje de texto conforme a IEC 1131, en el que las operaciones, como, por ejemplo, las llamadas de mdulos de funcin y funciones, la ejecucin condicionada de instrucciones, la repeticin de instrucciones, etc., se representan mediante instrucciones. TIME representa el tipo de datos "duracin". La entrada se realiza como literal de duracin. La longitud de los elementos de datos es de 32 bits. El rango de valores para las variables de este tipo de datos va de 0 a 2exp(32)-1. La unidad de medida para el tipo de datos TIME es 1 ms. Los tipos de datos derivados son tipos de datos que se han derivado de los tipos de datos elementales y/o de otros tipos de datos derivados. La definicin de los tipos de datos derivados se realiza en el editor de tipos de datos de Concept. Se distingue entre tipos de datos globales y tipos de datos locales.
TIME
Tipo de datos derivado
33002250
587
Glosario
Tipo de datos genrico Tipo de mdulo de funcin
Tipo de datos que sustituye otros tipos de datos.
Elemento de lenguaje compuesto por: 1) la definicin de una estructura de datos, dividida en variables de entrada, de salida e internas; 2) un conjunto de operaciones que se realizan con los elementos de la estructura de datos cuando se ejecuta una instancia del tipo de mdulo de funcin. Este conjunto de operaciones puede estar formulado en uno de los lenguajes IEC (tipo de DFB) o en "C" (tipo de EFB). Un tipo de mdulo de funcin se puede instanciar (ejecutar) varias veces. La vista general muestra la jerarqua de los tipos de datos tal como se utilizan en las entradas y salidas de funciones y mdulos de funcin. Los tipos de datos genricos se identifican mediante el prefijo "ANY". ANY_ELEM ANY_NUM ANY_REAL (REAL) ANY_INT (DINT, INT, UDINT, UINT) ANY_BIT (BOOL, BYTE, WORD) TIME Tipos de datos de sistema (expansiones IEC) Derivado (de los tipos de datos ANY) Los tipos de datos derivados globales estn disponibles en todos los proyectos de Concept y se encuentran en el directorio DFB, justo debajo del directorio Concept.
Tipos de datos
Tipos de datos derivados globales Tipos de datos derivados locales Token
Los tipos de datos derivados locales slo estn disponibles en un nico proyecto de Concept y sus DFB locales, y se guardan en el directorio DFB bajo el directorio del proyecto. La red "Token" controla la propiedad temporal del derecho de transferencia por parte de un nico participante. El Token recorre los participantes en una secuencia de direcciones circular (ascendente). Todos los participantes siguen el recorrido del token y pueden recibir todos los datos posibles enviados. Traffic Cop es una lista de componentes que se genera a partir de la lista de componentes del usuario. La lista Traffic Cop se gestiona en el PLC y contiene, adems de la lista de componentes del usuario, informacin de estado de los mdulos y las estaciones de E/S, por ejemplo. Condicin necesaria para que el control pase de uno o ms pasos predecesores a uno o ms pasos sucesores a lo largo de una conexin direccional.
Traffic Cop
Transicin
588
l l l
l l l
33002250
Glosario
UDEFB
Funciones/mdulos de funcin elementales definidos por el usuario Funciones o mdulos de funcin creados con el lenguaje de programacin C y disponibles en las bibliotecas de Concept. UDINT representa el tipo de datos "nmero entero de longitud doble sin signo (unsigned double integer)". La entrada se efecta en forma de literal entero, literal de base 2, literal de base 8 o literal de base 16. La longitud de los elementos de datos es de 32 bits. El rango de valores para las variables de este tipo de datos va de 0 a 2exp(32)-1. UINT representa el tipo de datos "nmero entero sin signo (unsigned integer)". La entrada se efecta en forma de literal entero, literal de base 2, literal de base 8 o literal de base 16. La longitud de los elementos de datos es de 16 bits. El rango de valores para las variables de este tipo de datos va de 0 a (2exp 16)-1. Funcin, mdulo de funcin o programa. Este trmino se puede referir tanto a un tipo o a una instancia.
UDINT
UINT
Unidad organizativa del programa Unlocated Variable
A las Unlocated Variables no se les asigna ninguna direccin de memoria de seal. Por lo tanto, tampoco ocupan ninguna direccin de memoria de seal. El sistema almacena el valor de estas variables, que se puede modificar con el editor de datos de referencia, de forma interna. A estas variables slo se accede mediante su nombre simblico. Las seales que no necesitan acceso a la periferia, p. ej., resultados intermedios, marcas de sistema, etc., deberan declararse preferiblemente como Unlocated Variables.
Valor inicial
Valor asignado a una variable durante el inicio del programa. La asignacin del valor se realiza en forma de literal.
33002250
589
Glosario
Variables
Las variables sirven para el intercambio de datos dentro de una misma seccin, entre secciones distintas y entre el programa y el PLC. Las variables se componen como mnimo de un nombre de variable y un tipo de datos. Si se asigna una direccin directa (referencia) a una variable, se habla de una Located Variable. Si a una variable no se le asigna ninguna direccin directa, se habla de una Unlocated Variable. Si a la variable se le asigna un tipo de datos derivado, se habla de una variable de elementos mltiples. Adems, tambin existen constantes y literales. Variables a las que se les ha asignado un tipo de datos derivado con ayuda de la palabra clave ARRAY (campo). Un campo es una coleccin de elementos de datos con el mismo tipo de datos. Variables a las que se ha asignado un tipo de datos derivado definido con STRUCT o ARRAY. Se distingue entre variables de campo y variables estructuradas. Variables a las que se ha asignado un tipo de dato derivado definido con STRUCT (estructura). Una estructura es una coleccin de elementos de datos de distintos tipos en general (tipos de datos elementales y/o tipos de datos derivados). Ventana seleccionada en este momento. Slo puede haber una ventana activa en un momento determinado. Cuando se activa una ventana, cambia el color de su barra de ttulo para distinguirla de las dems ventanas. Las ventanas no seleccionadas estn inactivas. Ventana dentro de una ventana de aplicacin. Dentro de una ventana de aplicacin puede haber abiertas varias ventanas de documento al mismo tiempo. No obstante, slo puede haber una ventana de documentoactiva. Las ventanas de documento en Concept son, por ejemplo, las secciones, la ventana de mensajes, el editor de datos de referencia y la configuracin del PLC. Ventana que contiene el espacio de trabajo, la barra de mens y la barra de herramientas para el programa de la aplicacin. El nombre de la aplicacin aparece en la barra de ttulo. Una ventana de aplicacin puede contener varias ventanas de documento. En Concept, la ventana de aplicacin corresponde a un proyecto. Vertical significa que la pgina del texto impreso es ms alta que ancha.
Variables de campo
Variables de elementos mltiples Variables estructuradas
Ventana activa
Ventana de documento
Ventana de la aplicacin
Vertical
590
33002250
Glosario
Vista general de la memoria de seal al leer la dotacin y al cargar
Vista general: Base de datos de proyectos Concept
Imagen de memoria de seal para leer desde o cargar en la memoria de seal
Editor de variables
Variables (valores de inicio)
U2
Editor RDE
D1
U3
D3
D2
U1
Memoria de seal del PLC
0x / 1x / 3x / 4x
WORD
WORD representa el tipo de datos "secuencia de bits 16". La entrada se efecta en forma de literal de base 2, literal de base 8 o literal de base 16. La longitud de los elementos de datos es de 16 bits. A este tipo de datos no se le puede asignar un rango de valores numrico.
Zoom DX
Esta propiedad permite conectarse a un objeto de programacin para observar y, en caso necesario, modificar los valores de los datos.
33002250
591
Glosario
592
33002250
ndice
B C A
CLC_PRO ALIM, 41 COMP_PID, 73 DEADTIME, 95 DERIV, 107 FGEN, 123 INTEG, 139 LAG, 161 LAG2, 173 LEAD_LAG, 195 PCON2, 235 PCON3, 243 PD_or_PI, 251 PDM, 263 PI, 273 PID, 307 PID_P, 335 PID_PF, 347 PIP, 397 PPI, 409 PWM, 419 QPWM, 443 SCON3, 467 VLIM, 561 COMP_DB, 69 COMP_PID, 73 Comparacin, 69
A
Ajuste automtico del regulador, 47 ALIM, 41 AUTOTUNE, 47
B
Bloque de funcin Parametrizacin, 23, 24 Bloque para caudal volumtrico, 215
C
CLC DELAY, 101 INTEGRATOR1, 151 LAG1, 167 LEAD_LAG, 203 LIMV, 209 PI1, 283 PID1, 321 PIDP1, 387 SMOOTH_RATE, 489 THREE_STEP_CON1, 533 THREEPOINT_CON1, 525 TWOPOINT_CON1, 549
33002250
593
Index
Conditioning DTIME, 113 INTEGRATOR, 145 LAG_FILTER, 179 LDLG, 185 LEAD, 191 MFLOW, 215 QDTIME, 437 SCALING, 463 TOTALIZER, 539 VEL_LIM, 555 Conmutacin de la estructura PD / PI, 251 Conmutador de valor terico, 495 CONT_CTL ALIM, 41 AUTOTUNE, 47 COMP_DB, 69 COMP_PID, 73 DEADTIME, 95 DELAY, 101 DERIV, 107 DTIME, 113 FGEN, 123 INTEG, 139 INTEGRATOR, 145 INTEGRATOR1, 151 Introduccin, 27 K_SQRT, 157 LAG, 161 LAG_FILTER, 179 LAG1, 167 LAG2, 173 LDLG, 185 LEAD, 191 LEAD_LAG, 195 LEAD_LAG1, 203 LIMV, 209 MFLOW, 215 MS, 221 MULDIV_W, 231 PCON2, 235 PCON3, 243 PD_or_PI, 251 PDM, 263 PI, 273 PI_B, 293
594
PI1, 283 PID, 307 PID_P, 335 PID_PF, 347 PID1, 321 PIDFF, 359 PIDP1, 387 PIP, 397 PPI, 409 PWM, 419 PWM1, 429 QDTIME, 437 QPWM, 443 RAMP, 451 RATIO, 457 SCALING, 463 SCON3, 467 SERVO, 473 SMOOTH_RATE, 489 SP_SEL, 495 SPLRG, 503 STEP2, 509 STEP3, 515 SUM_W, 521 THREE_STEP_CON1, 533 THREEPOINT_CON1, 525 TOTALIZER, 539 TWOPOINT_CON1, 549 VEL_LIM, 555 VLIM, 561 Control de dos actuadores, 503 Control manual de una salida, 221 Control para servomotores elctricos, 473 Controlador AUTOTUNE, 47 Controller PI_B, 293 PIDFF, 359 STEP2, 509 STEP3, 515
33002250
Index
D
DEADTIME, 95 DELAY, 101 DERIV, 107 Diferenciador con alisamiento, 107, 191, 489 DTIME, 113
LEAD_LAG1, 203 Limitador de crecimiento, 555 Limitador de crecimiento de primer orden, 209, 561 Limitador de crecimiento de segundo orden, 41 LIMV, 209
E
Escalado, 463
M
Matematicas COMP_DB, 69 Mathematics K_SQRT, 157 MULDIV_W, 231 SUM_W, 521 MFLOW, 215 Modulacin por ancho de pulso, 419, 429 Modulacin por ancho de pulso (simple), 443 Modulacin por duracin de pulso, 263 MS, 221 MULDIV_W, 231 Multiplicacin / Divisin, 231
F
FGEN, 123 Funcin Parametrizacin, 23, 24
G
Generador de funciones, 123 Generador de rampas, 451
I
INTEG, 139 Integrador, 539 Integrador con limitacin, 139, 145, 151 INTEGRATOR, 145 INTEGRATOR1, 151 Introduccin a la biblioteca de bloques CONT_CTL, 27
O
Output processing MS, 221 PWM1, 429 SERVO, 473 SPLRG, 503
K
K_SQRT, 157
P
Parametrizacin, 23, 24 PCON2, 235 PCON3, 243 PD_or_PI, 251 PDM, 263 PI, 273 PI_B, 293 PI1, 283 PID, 307 PID_P, 335 PID_PF, 347
L
LAG, 161 LAG_FILTER, 179 LAG1, 167 LAG2, 173 LDLG, 185 LEAD, 191 LEAD_LAG, 195
33002250
595
Index
PID1, 321 PIDFF, 359 PIDP1, 387 PID-Regler, 321 PIP, 397 PPI, 409 PWM, 419 PWM1, 429
S
SCALING, 463 SCON3, 467 SERVO, 473 Setpoint management RAMP, 451 RATIO, 457 SP_SEL, 495 SMOOTH_RATE, 489 SP_SEL, 495 SPLRG, 503 STEP2, 509 STEP3, 515 SUM_W, 521 Sumador, 521
Q
QDTIME, 437 QPWM, 443
R
Raz cuadrada, 157 RAMP, 451 RATIO, 457 Regulador de dos puntos, 235, 509, 549 Regulador de tres puntos, 243, 515, 525 Regulador de tres puntos de a pasos, 467, 533 Regulador PI, 273, 283 Regulador PI simple, 293 Regulador PID, 307 Regulador PID avanzado, 73 Regulador PID completo, 359 Regulador PID con estructura paralela, 335, 347, 387 Regulador PIP en cascada, 397 Regulador PPI en cascada, 409 Regulador proporcional, 457 Retardo, 113
T
THREE_STEP_CON1, 533 THREEPOINT_CON1, 525 TOTALIZER, 539 TWOPOINT_CON1, 549
U
Unidad de retardo de primer orden, 161, 167, 179 Unidad de retardo de segundo orden, 173 Unidad de tiempo muerto, 95, 101, 437 Unidad PD con alisamiento, 185, 195, 203
V
VEL_LIM, 555 VLIM, 561
596
33002250
Você também pode gostar
- Modulacion-Por Ampitud de PulsosDocumento21 páginasModulacion-Por Ampitud de PulsosAnonymous xViiYStvAinda não há avaliações
- SurakartaDocumento8 páginasSurakartaDarcy rodriguezAinda não há avaliações
- CronoamperometriaDocumento17 páginasCronoamperometriaDaniel HenaoAinda não há avaliações
- Anexo 1 Ejercicios y Formato Pre TareaDocumento8 páginasAnexo 1 Ejercicios y Formato Pre TareaMayerly Yiceth SiachoqueAinda não há avaliações
- Mat1-U8-Sesion 10Documento6 páginasMat1-U8-Sesion 10José Díaz AchoAinda não há avaliações
- Diagramas de Fases BinariosDocumento20 páginasDiagramas de Fases BinariosmartinAinda não há avaliações
- Caracterización de EucaliptoDocumento14 páginasCaracterización de EucaliptoDaniel ApazaAinda não há avaliações
- Unidad 4 Actividad 2Documento2 páginasUnidad 4 Actividad 2Omar E. Garabitos Padilla71% (7)
- Proyecto #1Documento8 páginasProyecto #1Andres BarreraAinda não há avaliações
- Textermodinamica Ejercicios PDFDocumento44 páginasTextermodinamica Ejercicios PDFpablosuarezposadaAinda não há avaliações
- NCh00146 2 2000 PDFDocumento15 páginasNCh00146 2 2000 PDFrenzoesAinda não há avaliações
- Sistemas Reciprocos en La Fisica de Dewey LarsonDocumento6 páginasSistemas Reciprocos en La Fisica de Dewey LarsonHerbert HurtadoAinda não há avaliações
- ExamenDocumento2 páginasExamensolis maldonado AshleyAinda não há avaliações
- Interpol Ac I OnDocumento8 páginasInterpol Ac I OnEdwin Ramiro Torrico VargasAinda não há avaliações
- Silabo de Dinamica Unc 2016-IIDocumento4 páginasSilabo de Dinamica Unc 2016-IIepocliAinda não há avaliações
- Silabo de Matematica y TrigonometriaDocumento37 páginasSilabo de Matematica y TrigonometriaVILLACIS ORQUERA RENE DAVIDAinda não há avaliações
- Gramatica Francesa EsencialDocumento56 páginasGramatica Francesa EsencialJuan100% (5)
- Trabajo de Investigacion F.PDocumento12 páginasTrabajo de Investigacion F.PEros Matias DavilaAinda não há avaliações
- Analisis y Discusion de Resultados ExperDocumento9 páginasAnalisis y Discusion de Resultados ExperJoséAndréQ.TorresAinda não há avaliações
- Fisica Hugo MedinaDocumento250 páginasFisica Hugo MedinaAndreé Vásquez TiconaAinda não há avaliações
- Análisis variables altura carga velocidadDocumento1 páginaAnálisis variables altura carga velocidadJhean TurpoAinda não há avaliações
- GUÍADocumento22 páginasGUÍAJesua RaudalesAinda não há avaliações
- Pec 1Documento7 páginasPec 1Aurelio Garcia MarcosAinda não há avaliações
- SERIE 3 (2018) Prop ColigDocumento5 páginasSERIE 3 (2018) Prop ColigEdu LeivaAinda não há avaliações
- CatapultaDocumento2 páginasCatapultaEdgar CardenasAinda não há avaliações
- Plan de estudios de ingeniería mecánica con créditos y horas de asignaturasDocumento1 páginaPlan de estudios de ingeniería mecánica con créditos y horas de asignaturasDiego AvendañoAinda não há avaliações
- 02 Bloques Del KBCDocumento5 páginas02 Bloques Del KBCleonardo_arriagaAinda não há avaliações
- ChromagenDocumento47 páginasChromagenOscar MauricioAinda não há avaliações
- Analizador HematicoDocumento14 páginasAnalizador HematicoLadyLu Rivera LoorAinda não há avaliações
- Razonamiento MatemáticoDocumento22 páginasRazonamiento Matemáticoxxgino999xxxAinda não há avaliações