Você também pode gostar
- Controle de NívelDocumento12 páginasControle de NívelLucas Fuzeto VizonìAinda não há avaliações
- Controladores Lógicos ProgramáveisDocumento5 páginasControladores Lógicos ProgramáveisIrvson SilveiraAinda não há avaliações
- Cálculo do Fator Corretivo para Troca de CalorDocumento3 páginasCálculo do Fator Corretivo para Troca de Calormarlonmrs13Ainda não há avaliações
- Análise comparativa de sistemas de refrigeração e aquecimentoDocumento4 páginasAnálise comparativa de sistemas de refrigeração e aquecimentoGiovana LocksAinda não há avaliações
- Questões de Cinemática - (CURSINHO PRÉ-EnEM) - Professor HenriqueDocumento6 páginasQuestões de Cinemática - (CURSINHO PRÉ-EnEM) - Professor HenriqueThaina RiosAinda não há avaliações
- Lista de Cálculo NuméricoDocumento4 páginasLista de Cálculo NuméricoAnonymous 1QsclBAinda não há avaliações
- PID SintoniaDocumento36 páginasPID Sintoniar282269zcAinda não há avaliações
- Lógica de ProgramaçãoDocumento32 páginasLógica de ProgramaçãoMarciano Gonçalves100% (1)
- Lista 3 - Gráficos de Cinemática - EsPCExDocumento12 páginasLista 3 - Gráficos de Cinemática - EsPCExRafael PinheiroAinda não há avaliações
- Prova Np1 Unip 2013Documento13 páginasProva Np1 Unip 2013vidaldanetAinda não há avaliações
- Introdução à sintaxe PORTUGOLDocumento32 páginasIntrodução à sintaxe PORTUGOLxbarretox100% (1)
- Controle PID para irrigação com ArduinoDocumento23 páginasControle PID para irrigação com ArduinoJhonathanCamposResendeAinda não há avaliações
- Redes Neurais Artificiais - Lista de ExercíciosDocumento4 páginasRedes Neurais Artificiais - Lista de ExercíciosRomeu BerthoAinda não há avaliações
- Curso Técnico Programação Sistemas InformáticosDocumento70 páginasCurso Técnico Programação Sistemas InformáticosTiago SousaAinda não há avaliações
- Lista de Exercícios de AlgoritmosDocumento19 páginasLista de Exercícios de AlgoritmosLuiz CarlosAinda não há avaliações
- Termodinâmica Fundamental Aula 8Documento18 páginasTermodinâmica Fundamental Aula 8Thales DuarteAinda não há avaliações
- 10 - Lista CinemáticaDocumento20 páginas10 - Lista CinemáticaPaulinha TorresAinda não há avaliações
- Algoritmo 01 - IntroduçãoDocumento42 páginasAlgoritmo 01 - IntroduçãoSilvano OliveiraAinda não há avaliações
- DOE experimentos otimizar processoDocumento24 páginasDOE experimentos otimizar processoVinicius IankeAinda não há avaliações
- Aula 51 Algoritmos em PseudocodigoDocumento51 páginasAula 51 Algoritmos em PseudocodigoPatricia JacintoAinda não há avaliações
- Ensaios laboratoriais de granulometria e densidade realDocumento8 páginasEnsaios laboratoriais de granulometria e densidade realRenato FeitozaAinda não há avaliações
- Avaliação 360 Graus Modelo RedesDocumento15 páginasAvaliação 360 Graus Modelo RedesLilian AlmeidaAinda não há avaliações
- Introdução Classes Métodos PythonDocumento44 páginasIntrodução Classes Métodos Pythonwilson.junior870Ainda não há avaliações
- Lista Eixo ChavetaDocumento4 páginasLista Eixo ChavetaLuis Gustavo ReisAinda não há avaliações
- KNN em classificação de vidrosDocumento6 páginasKNN em classificação de vidrosPâmela BeatrizAinda não há avaliações
- Aula Parafusos 1Documento33 páginasAula Parafusos 1Silvio FreitasAinda não há avaliações
- Introdução aos algoritmosDocumento55 páginasIntrodução aos algoritmosArgemiro AlbuquerqueAinda não há avaliações
- Questões de Mecânica dos Fluidos UFVJMDocumento4 páginasQuestões de Mecânica dos Fluidos UFVJMGabriela Gonçalves De OliveiraAinda não há avaliações
- Módulo 01 Cinematica Dos Solidos UnipDocumento6 páginasMódulo 01 Cinematica Dos Solidos UnipadsfasfadsfAinda não há avaliações
- Apostila - DME ExercíciosDocumento28 páginasApostila - DME ExercíciosMarcelo MontibellerAinda não há avaliações
- Python Tuplas e StringsDocumento22 páginasPython Tuplas e StringsEdson Gaudereto TeixeiraAinda não há avaliações
- Análise Numérica - Aula 1 - Introdução À Linguagem PythonDocumento17 páginasAnálise Numérica - Aula 1 - Introdução À Linguagem PythonJorge EustaquioAinda não há avaliações
- Aula 79 PDFDocumento10 páginasAula 79 PDFezequielAinda não há avaliações
- Cálculo Estequiométrico (Com Gabarito - Prof. Rafa - Internet - 2013Documento9 páginasCálculo Estequiométrico (Com Gabarito - Prof. Rafa - Internet - 2013Josimar Lima FerreiraAinda não há avaliações
- Lista Ciclo de RefrigeraçãoDocumento4 páginasLista Ciclo de RefrigeraçãoAtila MagroAinda não há avaliações
- Revisão de Cálculo EstequiométricoDocumento6 páginasRevisão de Cálculo EstequiométricoTalita MarcíliaAinda não há avaliações
- Peças de RevoluçãoDocumento17 páginasPeças de Revoluçãoapi-3727963Ainda não há avaliações
- Lista de Aprendizado de QuimicaDocumento8 páginasLista de Aprendizado de QuimicamarieAinda não há avaliações
- ESTEQUIOMETRIA - EXERCÍCIOS RESOLVIDOSDocumento8 páginasESTEQUIOMETRIA - EXERCÍCIOS RESOLVIDOSNicolly SantosAinda não há avaliações
- Redes Neurais: Aprendizado, Camadas e BackpropagationDocumento25 páginasRedes Neurais: Aprendizado, Camadas e BackpropagationsmarrrtAinda não há avaliações
- NR35Documento18 páginasNR35Lucas WarleyAinda não há avaliações
- Tabela de Seleção de Bombas - ExcelenteDocumento64 páginasTabela de Seleção de Bombas - ExcelentefeitosamarcosAinda não há avaliações
- Scilab - Transformada de Fourier e Series Fourier (atéDocumento17 páginasScilab - Transformada de Fourier e Series Fourier (atéJonh PauloAinda não há avaliações
- Exercícios (2023 Cinem I Est.)Documento12 páginasExercícios (2023 Cinem I Est.)Beya Miguel Beya MiguelAinda não há avaliações
- Exercícios de cálculos estequiométricosDocumento6 páginasExercícios de cálculos estequiométricosElson CavalcanteAinda não há avaliações
- Lendo Ângulos Com Um Potenciômetro Através de Um PIC - CorrDocumento18 páginasLendo Ângulos Com Um Potenciômetro Através de Um PIC - CorrErick FrotaAinda não há avaliações
- Cálculo de área de trocador de calor para condensação e sub-resfriamento de benzenoDocumento12 páginasCálculo de área de trocador de calor para condensação e sub-resfriamento de benzenoJuliana Marotta RodriguesAinda não há avaliações
- 4 - Capítulo 4 - Primeira Lei Da Termodinâmica para Volumes de Controle PDFDocumento30 páginas4 - Capítulo 4 - Primeira Lei Da Termodinâmica para Volumes de Controle PDFChristian Strobel100% (2)
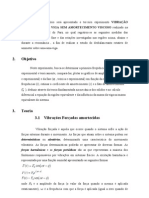
- VIBRAÇÕESDocumento9 páginasVIBRAÇÕEStoshugoAinda não há avaliações
- Exercícios FísicaDocumento6 páginasExercícios FísicaLucas PereiraAinda não há avaliações
- Mecanismos ApostilaDocumento106 páginasMecanismos ApostilaAlexandre RochaAinda não há avaliações
- Resumo Lugar Geométrico Das RaízesDocumento10 páginasResumo Lugar Geométrico Das RaízesHideki KondoAinda não há avaliações
- Aula5 APNP - Controlador L. Das Raízes - Atraso de FaseDocumento36 páginasAula5 APNP - Controlador L. Das Raízes - Atraso de Fasemanolomay838Ainda não há avaliações
- Aula 16 - Compensadores e Lugar Das RaizesDocumento5 páginasAula 16 - Compensadores e Lugar Das RaizesBruno De MattosAinda não há avaliações
- Controle analógico: compensação por avanço, atraso e avanço de faseDocumento11 páginasControle analógico: compensação por avanço, atraso e avanço de faseEtienne LimaAinda não há avaliações
- Projeto de CompensadoresDocumento10 páginasProjeto de CompensadoresGilmar SilvaAinda não há avaliações
- Aula4 Controlador L. Das Raízes - Avanço de FaseDocumento43 páginasAula4 Controlador L. Das Raízes - Avanço de Fasemanolomay838Ainda não há avaliações
- Projeto de controladores em cascataDocumento40 páginasProjeto de controladores em cascataMk DuarteAinda não há avaliações
- Sistemas de Controle II - CompensadoresDocumento128 páginasSistemas de Controle II - CompensadoresGiovanna MisquitaAinda não há avaliações
- Macetes de Constitucional Lembro-1Documento6 páginasMacetes de Constitucional Lembro-1Anonymous ytKuZfYoAinda não há avaliações
- Conectivos 2.0 PDFDocumento1 páginaConectivos 2.0 PDFJarbas MedeirosAinda não há avaliações
- Ebook - As 50 QUESTÕES Mais Dificeis PDFDocumento10 páginasEbook - As 50 QUESTÕES Mais Dificeis PDFRaquel CoelhoAinda não há avaliações
- Cap24 Halliday - Campo EletricoDocumento13 páginasCap24 Halliday - Campo EletricoAlisson MartinsAinda não há avaliações
- Cifra Club: Vídeos Notícias Shopping Imagens Maps Livros Voos Ferramentas de PesquisaDocumento3 páginasCifra Club: Vídeos Notícias Shopping Imagens Maps Livros Voos Ferramentas de PesquisajoaAinda não há avaliações
- 3667 - Projeto de Rede de Distribuição - Cálculo Elétrico PDFDocumento23 páginas3667 - Projeto de Rede de Distribuição - Cálculo Elétrico PDFRolando DalenzAinda não há avaliações
- Iip - Aula 2 - História Do MedicamentoDocumento29 páginasIip - Aula 2 - História Do MedicamentojAinda não há avaliações
- Língua Portuguesa 1o AnoDocumento58 páginasLíngua Portuguesa 1o AnoDuelAinda não há avaliações
- Combinatoria Lista2Documento1 páginaCombinatoria Lista2geniltonAinda não há avaliações
- UC1 Leitura e ComunicaçãoDocumento65 páginasUC1 Leitura e ComunicaçãoMatheus0% (1)
- Processos de conformação de cerâmicasDocumento42 páginasProcessos de conformação de cerâmicasJoaoAinda não há avaliações
- Lean Six Sigma em Análise de Registros IndustriaisDocumento22 páginasLean Six Sigma em Análise de Registros IndustriaisIBRAinda não há avaliações
- Teste de Aprendizagem Auditivo-Verbal de ReyDocumento2 páginasTeste de Aprendizagem Auditivo-Verbal de ReyCamila AzevedoAinda não há avaliações
- O complexo de superioridade na Igreja e suas consequênciasDocumento10 páginasO complexo de superioridade na Igreja e suas consequênciasFabioAinda não há avaliações
- Movimento Uniforme IIDocumento7 páginasMovimento Uniforme IIClaude BrechtAinda não há avaliações
- Mapa CorumbiaraDocumento1 páginaMapa CorumbiaraJessica RodriguesAinda não há avaliações
- Aparição O Oblívio - Jazigos Da Europa - A ShoahDocumento164 páginasAparição O Oblívio - Jazigos Da Europa - A ShoahZero AdptAinda não há avaliações
- Análise da obra O Príncipe de MaquiavelDocumento5 páginasAnálise da obra O Príncipe de MaquiavelAntonio J Almeida JuniorAinda não há avaliações
- GPMADocumento7 páginasGPMAjcegnunesAinda não há avaliações
- Cálculo de volumes em terraplenagem de estradasDocumento18 páginasCálculo de volumes em terraplenagem de estradasGuilherme Veridiano GuimarãesAinda não há avaliações
- Terri Anne Browning - The Rocker #10 - The Rocker Who Hates Me (Revisado)Documento266 páginasTerri Anne Browning - The Rocker #10 - The Rocker Who Hates Me (Revisado)tavaneAinda não há avaliações
- MUV posição tempoDocumento1 páginaMUV posição tempoJailton AlvesAinda não há avaliações
- 5 - CSR VW Rev 13 - Fórmula Q Integral 5 EdiçãoDocumento34 páginas5 - CSR VW Rev 13 - Fórmula Q Integral 5 Ediçãoandte costaAinda não há avaliações
- Kósmos Noetós. Metafísica de PeirceDocumento17 páginasKósmos Noetós. Metafísica de Peircegmjr760% (1)
- AS TRÊS CONCEPÇÕES DE LINGUAGEMDocumento4 páginasAS TRÊS CONCEPÇÕES DE LINGUAGEMValeria MartinsAinda não há avaliações
- A Dor Faz ArteDocumento3 páginasA Dor Faz ArtealavigneAinda não há avaliações
- Meninos de todas as cores descobrem a alegria das diferençasDocumento3 páginasMeninos de todas as cores descobrem a alegria das diferençasAndreia PereiraAinda não há avaliações
- Atividades de Inglês para MilitarDocumento4 páginasAtividades de Inglês para MilitarBruna OliveiraAinda não há avaliações
- Manual para identificar e atender crianças superdotadas na Educação InfantilDocumento63 páginasManual para identificar e atender crianças superdotadas na Educação InfantilEndi CecciAinda não há avaliações
- 2c2aa Sc3a9rie BiologiaDocumento8 páginas2c2aa Sc3a9rie BiologiaGislan RochaAinda não há avaliações
- Ficha 1 - Pensamento EstrategicoDocumento14 páginasFicha 1 - Pensamento EstrategicoPalloma Shanice100% (1)
- Sensores de temperatura industriaisDocumento20 páginasSensores de temperatura industriaisJosé Macedo100% (1)
- Racionais 6oDocumento244 páginasRacionais 6oMara AzevedoAinda não há avaliações
- 02 MatematicaDocumento219 páginas02 Matematicaadones araujo100% (1)