Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- RtosDocumento78 páginasRtossekinAinda não há avaliações
- Cutting Guide: Integrated Seat Post (ISP)Documento4 páginasCutting Guide: Integrated Seat Post (ISP)Anand sAinda não há avaliações
- LHR IndstryDocumento84 páginasLHR Indstryabubakar09ect50% (2)
- NJAPA-PaveXpress V2 PresentationDocumento75 páginasNJAPA-PaveXpress V2 PresentationLuis MogrovejoAinda não há avaliações
- FD-SOI and FinFET Technologies ComparedDocumento25 páginasFD-SOI and FinFET Technologies ComparedDhanishtha SinghAinda não há avaliações
- PNG382 FT en 11Documento2 páginasPNG382 FT en 11Misu1983Ainda não há avaliações
- Part A: - To Be Filled in by Officer From Respective OrganisationDocumento1 páginaPart A: - To Be Filled in by Officer From Respective OrganisationArcont ScriptAinda não há avaliações
- Heliobond GI WE3Documento24 páginasHeliobond GI WE3jarodzeeAinda não há avaliações
- RDSO - Vendor Directory July 16 FinalDocumento233 páginasRDSO - Vendor Directory July 16 Finalabhics6750% (2)
- Mi 05025Documento16 páginasMi 05025walidAinda não há avaliações
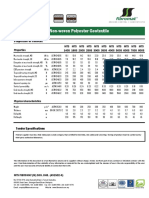
- FibrotexDocumento2 páginasFibrotexMan ChupingAinda não há avaliações
- Static Electricity and Charge AccumulationDocumento75 páginasStatic Electricity and Charge AccumulationArjav DesaiAinda não há avaliações
- Rotary EvaporatorDocumento3 páginasRotary EvaporatorDaryl ChianAinda não há avaliações
- Underfloor Wheelset Lathe: Operating / Maintenance ManualDocumento84 páginasUnderfloor Wheelset Lathe: Operating / Maintenance ManualMinh Canh100% (1)
- Manaul de Partes Bws 1 YmDocumento53 páginasManaul de Partes Bws 1 YmRobinson GuanemeAinda não há avaliações
- Install bladder tanks under homesDocumento4 páginasInstall bladder tanks under homessauro100% (1)
- Durehete 1055Documento5 páginasDurehete 1055alextentwenty100% (1)
- DrillingMotors MKT 001 01Documento10 páginasDrillingMotors MKT 001 01Aman Aayra SrivastavaAinda não há avaliações
- Machine Guarding LP PDFDocumento4 páginasMachine Guarding LP PDFrexivyAinda não há avaliações
- Projection Achievement ReportDocumento8 páginasProjection Achievement ReportPskaruppiah KarupsAinda não há avaliações
- Radiography 2 ProcedureDocumento9 páginasRadiography 2 ProceduresheikmoinAinda não há avaliações
- Mosquito RepellentDocumento6 páginasMosquito RepellentJai MurugeshAinda não há avaliações
- CLC Blocks ProposolDocumento5 páginasCLC Blocks ProposolGyi TawAinda não há avaliações
- Technical Guidance Notes: Level 2, No. 13Documento4 páginasTechnical Guidance Notes: Level 2, No. 13Τε ΧνηAinda não há avaliações
- Nagios Enable NRPEDocumento2 páginasNagios Enable NRPEMartin RuswandaAinda não há avaliações
- Xxxpol / 65° Az 17.3 / 17.0 / 17.3 Dbi: DiplexedDocumento2 páginasXxxpol / 65° Az 17.3 / 17.0 / 17.3 Dbi: DiplexedMahamoud HamoudAinda não há avaliações
- Kinematics equations motion problemsDocumento3 páginasKinematics equations motion problemsAhmed HossainAinda não há avaliações
- 20&604 WDSeriesDocumento2 páginas20&604 WDSeriesbiteme99Ainda não há avaliações
- Home water pressure booster pumpDocumento3 páginasHome water pressure booster pumpbadaasaabAinda não há avaliações
- Ms-Mech-10, Ms Fabrication of PipingDocumento13 páginasMs-Mech-10, Ms Fabrication of PipingBabar Manzoor GhauriAinda não há avaliações