Você também pode gostar
- The Technology Procurement HandbookDocumento329 páginasThe Technology Procurement HandbookAlexander Jose Chacin NavarroAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- ResumeDocumento3 páginasResumeAstig Kuging63% (8)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Admission: North South University (NSU) Question Bank Summer 2019Documento10 páginasAdmission: North South University (NSU) Question Bank Summer 2019Mahmoud Hasan100% (7)
- 02 Lab 1.HCIDocumento2 páginas02 Lab 1.HCILopao SerojemAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Mathematics4 q4 Week4 v4Documento11 páginasMathematics4 q4 Week4 v4Morales JinxAinda não há avaliações
- Field and Laboratory Evaluation of A Soft Clay Southern IraqDocumento14 páginasField and Laboratory Evaluation of A Soft Clay Southern Iraqvidyaranya_bAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Lennox IcomfortTouch ManualDocumento39 páginasLennox IcomfortTouch ManualMuhammid Zahid AttariAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Skirmishes Graham Harman PDFDocumento383 páginasSkirmishes Graham Harman PDFparaiaAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- 1988 Mazda 323 Workshop Manual V1.0 (Turbo Only)Documento880 páginas1988 Mazda 323 Workshop Manual V1.0 (Turbo Only)Mike Marquez100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- 3DD5036 Horizontal.2Documento6 páginas3DD5036 Horizontal.2routerya50% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Mediator Analysis of Job Embeddedness - Relationship Between Work-Life Balance Practices and Turnover IntentionsDocumento15 páginasMediator Analysis of Job Embeddedness - Relationship Between Work-Life Balance Practices and Turnover IntentionsWitty MindsAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Lub OIl Flushing Procedure PDFDocumento44 páginasLub OIl Flushing Procedure PDFSubrahmanyam100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- 61annual Report 2010-11 EngDocumento237 páginas61annual Report 2010-11 Engsoap_bendAinda não há avaliações
- Myers Briggs Type Indicator-2Documento1 páginaMyers Briggs Type Indicator-2api-261818438Ainda não há avaliações
- Sociology of Crimes and Ethics Suggested Answer "A"Documento34 páginasSociology of Crimes and Ethics Suggested Answer "A"Bernabe Fuentes Jr.Ainda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Solutions of Inverse Geodetic Problem in Navigational Applications PDFDocumento5 páginasSolutions of Inverse Geodetic Problem in Navigational Applications PDFLacci123Ainda não há avaliações
- Gates Crimp Data and Dies Manual BandasDocumento138 páginasGates Crimp Data and Dies Manual BandasTOQUES00Ainda não há avaliações
- SAP Solution Manager - CHARM - Retrofit - Change Request Management Enhanced RetrofitDocumento61 páginasSAP Solution Manager - CHARM - Retrofit - Change Request Management Enhanced RetrofitARPITA BISWASAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- MidsemDocumento6 páginasMidsemAravind SomasundaramAinda não há avaliações
- Application Letter For Promotion T2 T3Documento24 páginasApplication Letter For Promotion T2 T3FGacadSabadoAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Corrosion Protection PT Tosanda Dwi SapurwaDocumento18 páginasCorrosion Protection PT Tosanda Dwi SapurwaYoga FirmansyahAinda não há avaliações
- Plastic Hinge Length and Depth For Piles in Marine Oil Terminals Including Nonlinear Soil PropertiesDocumento10 páginasPlastic Hinge Length and Depth For Piles in Marine Oil Terminals Including Nonlinear Soil PropertiesGopu RAinda não há avaliações
- Moc3040 MotorolaDocumento3 páginasMoc3040 MotorolaBryanTipánAinda não há avaliações
- SDOF SystemsDocumento87 páginasSDOF SystemsAhmet TükenAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Operation and Service 69UG15: Diesel Generator SetDocumento72 páginasOperation and Service 69UG15: Diesel Generator Setluis aguileraAinda não há avaliações
- Shift Registers NotesDocumento146 páginasShift Registers NotesRajat KumarAinda não há avaliações
- Lecture 5Documento20 páginasLecture 5Paylaşım KanalıAinda não há avaliações
- Empowerment Technology Lesson 4 PDFDocumento18 páginasEmpowerment Technology Lesson 4 PDFqueenless eightyoneAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Combinational Logic-Part-2 PDFDocumento25 páginasCombinational Logic-Part-2 PDFSAKSHI PALIWALAinda não há avaliações
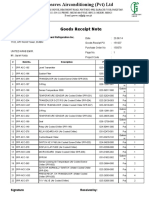
- Goods Receipt Note: Johnson Controls Air Conditioning and Refrigeration Inc. (YORK) DateDocumento4 páginasGoods Receipt Note: Johnson Controls Air Conditioning and Refrigeration Inc. (YORK) DateSaad PathanAinda não há avaliações