Você também pode gostar
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsAinda não há avaliações
- PNR FlowDocumento23 páginasPNR Flowsanthosh216eeeAinda não há avaliações
- HSIC ECN 21may2012 PDFDocumento6 páginasHSIC ECN 21may2012 PDFSandeep ArAinda não há avaliações
- Sample and Hold CircuitsDocumento16 páginasSample and Hold CircuitsPraveen AndrewAinda não há avaliações
- New Microsoft Word DocumentDocumento4 páginasNew Microsoft Word Documentalaa delewarAinda não há avaliações
- Over Current Course PointDocumento4 páginasOver Current Course Pointوليد موسىAinda não há avaliações
- Analysis of Oscillograms (v6.0)Documento21 páginasAnalysis of Oscillograms (v6.0)luhusapaAinda não há avaliações
- Usb 2 0 Hsic EcnDocumento4 páginasUsb 2 0 Hsic Ecnmpm proiectareAinda não há avaliações
- Embedded System Timing Analysis Basics: Part 2 - Fan-Out & Loading AnalysisDocumento6 páginasEmbedded System Timing Analysis Basics: Part 2 - Fan-Out & Loading AnalysisMuni TheBossAinda não há avaliações
- Testing and CharacterizationDocumento20 páginasTesting and CharacterizationGowthamAinda não há avaliações
- How To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - Power Factor CorrectionDocumento2 páginasHow To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - Power Factor CorrectionThien DinhAinda não há avaliações
- Isscc2022 000023CLDocumento17 páginasIsscc2022 000023CLdashuai huaAinda não há avaliações
- PCB Layout AN1051Documento69 páginasPCB Layout AN1051bourby68Ainda não há avaliações
- Basic Pic16/17 Oscillator Design: By: Dan MatthewsDocumento4 páginasBasic Pic16/17 Oscillator Design: By: Dan Matthewsandi2k9Ainda não há avaliações
- Connect Passive Components To Logic GatesDocumento11 páginasConnect Passive Components To Logic GatesqqazertyAinda não há avaliações
- Class Notes - Computer Relay ArchitectureDocumento10 páginasClass Notes - Computer Relay ArchitecturebiswajitsahooAinda não há avaliações
- Controllability and ObservabilityDocumento15 páginasControllability and ObservabilityaashishscribdAinda não há avaliações
- Critical Bandwidth For The Load Transient Response of VRMDocumento8 páginasCritical Bandwidth For The Load Transient Response of VRMharis13harisAinda não há avaliações
- Antenna Analyzer vk5jst Version 1 Instructions PDFDocumento10 páginasAntenna Analyzer vk5jst Version 1 Instructions PDFPisu Miau Pisu MiauAinda não há avaliações
- Unit 5Documento41 páginasUnit 5sparsh kaudinyaAinda não há avaliações
- Western Protective Relay Conference Paper - Pre-Insertion Resistors in High Voltage Capacitor Bank SwitchingDocumento12 páginasWestern Protective Relay Conference Paper - Pre-Insertion Resistors in High Voltage Capacitor Bank SwitchingPrajiWazharyAinda não há avaliações
- AP0107 Impedance-Controlled RoutingDocumento6 páginasAP0107 Impedance-Controlled RoutingdrakenhavenAinda não há avaliações
- Partial Discharge Diagnosis On Large Power TransformersDocumento6 páginasPartial Discharge Diagnosis On Large Power TransformersDiego VidarteAinda não há avaliações
- Technical Considerations Specification LV SwitchboardsDocumento17 páginasTechnical Considerations Specification LV SwitchboardsZul FadzlyAinda não há avaliações
- 1149 6 SummaryDocumento8 páginas1149 6 SummarySrikanthReddyKandhiAinda não há avaliações
- MT-013 Tutorial: Evaluating High Speed DAC PerformanceDocumento16 páginasMT-013 Tutorial: Evaluating High Speed DAC PerformanceKrishna ReddyAinda não há avaliações
- Precision DAC - AC SpecsDocumento17 páginasPrecision DAC - AC SpecsAvinash BadanikaiAinda não há avaliações
- Ring Oscillator ThesisDocumento8 páginasRing Oscillator Thesisafjvbpyki100% (2)
- 8 Hint For Better Network Measurement 5965-8166EDocumento12 páginas8 Hint For Better Network Measurement 5965-8166ENguyễn Tuấn NgọcAinda não há avaliações
- Racid 1mdu07006-EnDocumento36 páginasRacid 1mdu07006-Enhey_frindAinda não há avaliações
- Installation Reg For HV Capacitor Bank PDFDocumento13 páginasInstallation Reg For HV Capacitor Bank PDFJaka Sembung GolokAinda não há avaliações
- Debug and Testability Features For Multi-Protocol 10G SerdesDocumento5 páginasDebug and Testability Features For Multi-Protocol 10G SerdesvelusnAinda não há avaliações
- MT-020: ADC Architectures I: The Flash Converter: by Walt KesterDocumento15 páginasMT-020: ADC Architectures I: The Flash Converter: by Walt KesterlewiszenAinda não há avaliações
- 555 Timer As Mono Stable Multi VibratorDocumento8 páginas555 Timer As Mono Stable Multi VibratorchrisgeclayAinda não há avaliações
- INTEGRATION, The VLSI Journal: Shu-Yi Wong, Chunhong ChenDocumento14 páginasINTEGRATION, The VLSI Journal: Shu-Yi Wong, Chunhong ChenManpreet SinghAinda não há avaliações
- FVofDiffOpAmp WPDocumento51 páginasFVofDiffOpAmp WPmarius260Ainda não há avaliações
- Executive SummaryDocumento33 páginasExecutive Summaryanandshekhar1885Ainda não há avaliações
- Channel ElementsDocumento6 páginasChannel ElementsVikas DwivediAinda não há avaliações
- Pipeline Adc Thesis PDFDocumento7 páginasPipeline Adc Thesis PDFlauratorrestucson100% (2)
- 10 Hints For Making Better Network Analyzer MeasurementsDocumento18 páginas10 Hints For Making Better Network Analyzer MeasurementsH IIVAinda não há avaliações
- Crystal Oscillator Circuits Krieger Matthys DesignDocumento3 páginasCrystal Oscillator Circuits Krieger Matthys DesignNasir UddinAinda não há avaliações
- TI Data Converter GuideDocumento16 páginasTI Data Converter GuideDavid PostonAinda não há avaliações
- A High-Speed High-Resolution Latch Comparator For Pipeline Analog-to-Digital ConvertersDocumento4 páginasA High-Speed High-Resolution Latch Comparator For Pipeline Analog-to-Digital ConvertersJessyAinda não há avaliações
- Zhang 2016Documento3 páginasZhang 2016Elisa Alejandra Salcedo MartínezAinda não há avaliações
- Unit 5Documento60 páginasUnit 5sparsh kaudinyaAinda não há avaliações
- Application Note Gan Power Amplifier Pulsed Operation Best PracticesDocumento5 páginasApplication Note Gan Power Amplifier Pulsed Operation Best PracticesPeter MalamaAinda não há avaliações
- Intel Processor Power Delivery DesignDocumento13 páginasIntel Processor Power Delivery DesignE.I.OSEAinda não há avaliações
- Adc Design DasDocumento12 páginasAdc Design Dasemv_prasadAinda não há avaliações
- Low Power ThesisDocumento6 páginasLow Power Thesistiffanybarbermobile100% (2)
- California Eastern LaboratoriesDocumento10 páginasCalifornia Eastern LaboratorieskuazuAinda não há avaliações
- Esting 40 and 100 Gbps Ethernet: Application NoteDocumento9 páginasEsting 40 and 100 Gbps Ethernet: Application NoteJadson CostaAinda não há avaliações
- Installation and Operating Instructions R.O.C.O.F Protection RelayDocumento24 páginasInstallation and Operating Instructions R.O.C.O.F Protection RelayBilal ŞimşekAinda não há avaliações
- High-Performance D/A-Converters: Application to Digital TransceiversNo EverandHigh-Performance D/A-Converters: Application to Digital TransceiversAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Highly Integrated Gate Drivers for Si and GaN Power TransistorsNo EverandHighly Integrated Gate Drivers for Si and GaN Power TransistorsAinda não há avaliações
- BTS824RDocumento14 páginasBTS824RVasyaAinda não há avaliações
- LMH6550 Differential, High Speed Op Amp: R R V V ADocumento25 páginasLMH6550 Differential, High Speed Op Amp: R R V V AJavier Felipe AlvaradoAinda não há avaliações
- CLP Com Ihm IncorporadaDocumento3 páginasCLP Com Ihm IncorporadawallersonaAinda não há avaliações
- Introduction To Computing:: Computer SystemsDocumento27 páginasIntroduction To Computing:: Computer SystemsPhan Giang ChâuAinda não há avaliações
- MML Task Result Nokia 20220905 104113Documento81 páginasMML Task Result Nokia 20220905 104113Adil MuradAinda não há avaliações
- CR95HFDocumento72 páginasCR95HFquemasda quiensoyAinda não há avaliações
- Angle Modulation Tutorial 1Documento23 páginasAngle Modulation Tutorial 1Haider Al RikabiAinda não há avaliações
- PC481 Course Note1ádDocumento31 páginasPC481 Course Note1ádLê Nguyễn Bảo DuyAinda não há avaliações
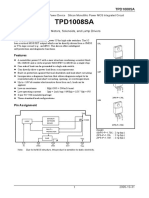
- TPD1008SA F High-Side Power SwitchDocumento11 páginasTPD1008SA F High-Side Power SwitchOlga PlohotnichenkoAinda não há avaliações
- Understanding Vector Group of Transformer (Part 2) - EEPDocumento9 páginasUnderstanding Vector Group of Transformer (Part 2) - EEPsasenthil241464Ainda não há avaliações
- The Federal University of Technology Akure, Ondo StateDocumento5 páginasThe Federal University of Technology Akure, Ondo StatetarvsAinda não há avaliações
- Relays 440 RDocumento3 páginasRelays 440 RRichard MorenoAinda não há avaliações
- Communication Systems (EE-341) : Lecture-2 Introduction Part-2Documento34 páginasCommunication Systems (EE-341) : Lecture-2 Introduction Part-2akhalifeAinda não há avaliações
- Datasheet ASW 3 6K LT G2 Pro Series 0322 - Global EN - WebDocumento2 páginasDatasheet ASW 3 6K LT G2 Pro Series 0322 - Global EN - WebanisahAinda não há avaliações
- 3 EDC Lab ManualDocumento73 páginas3 EDC Lab ManualVijayalakshmi PrakashAinda não há avaliações
- Waveform Generators PDFDocumento52 páginasWaveform Generators PDFVijayanand SAinda não há avaliações
- Digital Thermometer Using 8051 Microcontroller Project ReportDocumento18 páginasDigital Thermometer Using 8051 Microcontroller Project ReportZakaria BelyamaniAinda não há avaliações
- B3Documento3 páginasB3Jericho MoralesAinda não há avaliações
- Ucc 2897 ADocumento47 páginasUcc 2897 Akunjbihari golaAinda não há avaliações
- BEI Drawworks Encoder HS35Documento2 páginasBEI Drawworks Encoder HS35Alexander Fraile100% (1)
- Rapid Star Ballas Wiring DiagramDocumento2 páginasRapid Star Ballas Wiring DiagramMuhamad PriyatnaAinda não há avaliações
- Effect of Slots On Micrtostrip Patch AntennaDocumento3 páginasEffect of Slots On Micrtostrip Patch AntennasrinathboinaAinda não há avaliações
- A - Semiconductores PDFDocumento19 páginasA - Semiconductores PDFAndres GarciaAinda não há avaliações
- Medusa 4 TS 09 033Documento2 páginasMedusa 4 TS 09 033doantran2508Ainda não há avaliações
- DTMF Encoding and DecodingDocumento6 páginasDTMF Encoding and DecodingmastelecentroAinda não há avaliações
- 4 ECNG Over Current Relay CT CalcDocumento28 páginas4 ECNG Over Current Relay CT Calcom_23123062Ainda não há avaliações
- 828 Digital Control: ApplicationsDocumento4 páginas828 Digital Control: ApplicationsherysyamAinda não há avaliações
- AMD Geode LX EPIC RDK PDFDocumento26 páginasAMD Geode LX EPIC RDK PDFURIAinda não há avaliações
- Dont DownloadDocumento23 páginasDont DownloadMohamad NabihAinda não há avaliações
- 1MRB520292-Uen-Reb500sys User Manua Section 11.5Documento6 páginas1MRB520292-Uen-Reb500sys User Manua Section 11.5ngocanhvyAinda não há avaliações