Você também pode gostar
- Capital RisqueDocumento40 páginasCapital RisqueMustapha Elmoadin100% (1)
- Fiche Aquaponie 2013 CoursDocumento9 páginasFiche Aquaponie 2013 Coursresearchfr100% (2)
- Audit Comptable Et FinancierDocumento95 páginasAudit Comptable Et FinancierHicham Messid0% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesAinda não há avaliações
- U Rythme Des Mots 2 PDFDocumento160 páginasU Rythme Des Mots 2 PDFJade Zapata50% (2)
- Fabrication Mecanique Cours PDFDocumento89 páginasFabrication Mecanique Cours PDFDeckard Regis Shaw100% (3)
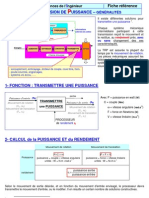
- Transmission de Puissance - GeneralitesDocumento10 páginasTransmission de Puissance - Generalitesntayoub75% (4)
- Memoire ERPDocumento78 páginasMemoire ERPmacao100100% (2)
- Cours Ajustements PRDocumento5 páginasCours Ajustements PRsamir ghebouliAinda não há avaliações
- ISO 14001 Guide de TransitionDocumento12 páginasISO 14001 Guide de TransitionBadr BouslamaAinda não há avaliações
- Dessin D'ensDocumento27 páginasDessin D'ensIsrae El AmriAinda não há avaliações
- Les Guidages en RotationDocumento54 páginasLes Guidages en RotationJaksMaksAinda não há avaliações
- Pro 2017Documento14 páginasPro 2017Crazy ytAinda não há avaliações
- Fabrication MecaniqueDocumento39 páginasFabrication MecaniqueLarax123100% (8)
- Comment Bien Travailler en Équipe Et Améliorer Radicalement Vos RésultatsDocumento6 páginasComment Bien Travailler en Équipe Et Améliorer Radicalement Vos RésultatsTETRACONE GEOTECHNIQUEAinda não há avaliações
- Physique Cours 7ème AnnéeDocumento192 páginasPhysique Cours 7ème AnnéentayoubAinda não há avaliações
- Bride de SerrageDocumento3 páginasBride de SerrageSalah Dark100% (1)
- Le Mandala de L'être, Par Richard MossDocumento2 páginasLe Mandala de L'être, Par Richard MossJoop-le-philosophe100% (1)
- Transmission de PuissanceDocumento59 páginasTransmission de Puissancentayoub100% (8)
- Maths Cours 8ème AnnéeDocumento232 páginasMaths Cours 8ème Annéentayoub100% (1)
- Exercice ReducteurDocumento8 páginasExercice ReducteurGyAinda não há avaliações
- Physique Cours 8ème AnnéeDocumento159 páginasPhysique Cours 8ème Annéentayoub100% (2)
- Liaisons Mã©caniques Et Schã©ma Cinã©matiqueDocumento32 páginasLiaisons Mã©caniques Et Schã©ma Cinã©matiqueMohamedAinda não há avaliações
- DEVOIR DE Controle N°1 Vé 2021Documento3 páginasDEVOIR DE Controle N°1 Vé 2021Saifeddine BrikiAinda não há avaliações
- STI BE - Guidage en RotationDocumento14 páginasSTI BE - Guidage en Rotationmeoh eezaAinda não há avaliações
- DC1 1se 2021Documento4 páginasDC1 1se 2021Besbes ZiedAinda não há avaliações
- TD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airDocumento99 páginasTD 1: Compresseur: ON DONNE: Trois Vues Réduites Du Compresseur D'airCHOKRI Atef100% (1)
- Exercice Cotation Fonctionnelle PRDocumento4 páginasExercice Cotation Fonctionnelle PRhamrouniAinda não há avaliações
- Sisr4 05 tp1 Pws Niveau 2Documento12 páginasSisr4 05 tp1 Pws Niveau 2api-296100887Ainda não há avaliações
- TD 1 LiaisonsschmacinmatiqueDocumento6 páginasTD 1 LiaisonsschmacinmatiqueSamba SallAinda não há avaliações
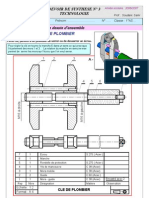
- Devoirdesynthesen3 1as 2006 2007 Cle+de+PlombierDocumento5 páginasDevoirdesynthesen3 1as 2006 2007 Cle+de+Plombierntayoub82% (11)
- Les Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLDocumento14 páginasLes Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLTom BriderAinda não há avaliações
- Chapitre 3 - Liaisons Complètes DémontablesDocumento13 páginasChapitre 3 - Liaisons Complètes DémontablesahidouriAinda não há avaliações
- 1 TD Liaisons EncastrementDocumento9 páginas1 TD Liaisons EncastrementWael metouiAinda não há avaliações
- GUIDAGE EN ROTATION ÉlèveDocumento21 páginasGUIDAGE EN ROTATION ÉlèveKahri Youssef100% (1)
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Documento8 páginasCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniAinda não há avaliações
- Liaison EncastrementDocumento18 páginasLiaison Encastrementkhocine100% (1)
- Corrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonDocumento8 páginasCorrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonpinamarkAinda não há avaliações
- Cours Modelisation Des Liaisons eDocumento7 páginasCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- TD 30 - Représentation D'une Fonction Logique PDFDocumento4 páginasTD 30 - Représentation D'une Fonction Logique PDFbhs channelAinda não há avaliações
- Modelisation Des Liaisons: MécaniqueDocumento15 páginasModelisation Des Liaisons: MécaniqueSimo StitAinda não há avaliações
- Cota 2023Documento12 páginasCota 2023hamrouniAinda não há avaliações
- Cours Cotation Fonctionnelle PRDocumento4 páginasCours Cotation Fonctionnelle PRRachid TopAinda não há avaliações
- Exercices ENSAMDocumento14 páginasExercices ENSAMAnass AzamiAinda não há avaliações
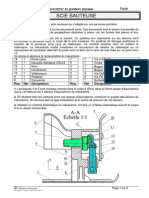
- TD20 Scie SauteuseDocumento2 páginasTD20 Scie SauteuseNabiha LabidiAinda não há avaliações
- Les Tolérances GéométriquesDocumento11 páginasLes Tolérances GéométriquesakouAinda não há avaliações
- TD Avant RattrapageDocumento6 páginasTD Avant RattrapageBakary Biro100% (1)
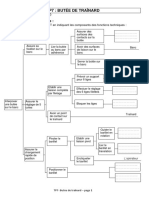
- 07 Butee TrainardDocumento5 páginas07 Butee TrainardHkiri MohamedAinda não há avaliações
- D - Cotation Fonctionnelle PDFDocumento26 páginasD - Cotation Fonctionnelle PDFAnonymous Vhn6VwguSV100% (1)
- Dess 1 Cours - Modelisation - Des - Liaisons - eDocumento7 páginasDess 1 Cours - Modelisation - Des - Liaisons - eelvis etienneAinda não há avaliações
- CATIA V5 DocumentDocumento6 páginasCATIA V5 DocumentChokri AtefAinda não há avaliações
- 8fa9r GriffeDocumento2 páginas8fa9r GriffeSimo StitAinda não há avaliações
- F3 ApefDocumento5 páginasF3 ApefZouhairAinda não há avaliações
- Guidage en Translation PDFDocumento10 páginasGuidage en Translation PDFAzerty DelegfrAinda não há avaliações
- 01 Exercice BanderoleuseDocumento1 página01 Exercice BanderoleuseESSOME ESSOME OLIVIER STEPHANEAinda não há avaliações
- Exercices de Dessin Technique Exercices of Engineering DrawingDocumento32 páginasExercices de Dessin Technique Exercices of Engineering DrawingABDELHAKIMAinda não há avaliações
- P - Etude6 - Les LiaisonsDocumento4 páginasP - Etude6 - Les LiaisonsSamsun GalaxAinda não há avaliações
- Roulement BCDocumento6 páginasRoulement BCOtman OtoAinda não há avaliações
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéDocumento2 páginasLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
- DS1 - 1èr STEDocumento4 páginasDS1 - 1èr STEmasteratsii100% (1)
- CC1 Im1 Ie1 17 18Documento1 páginaCC1 Im1 Ie1 17 18Hamza RimiAinda não há avaliações
- TD Vérin Rotatif Amorti ÉlèveDocumento5 páginasTD Vérin Rotatif Amorti ÉlèveZAEKHK ZEIGZA100% (2)
- TD-Poulie Embrayage Centrifuge PFDDocumento5 páginasTD-Poulie Embrayage Centrifuge PFDbhsbhs19Ainda não há avaliações
- Epreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalDocumento7 páginasEpreuve Sujet Bac 2021 Construction Mecanique T1 1er Groupe 2021 SenegalSaliouAinda não há avaliações
- Les Liaisons Fixes Ou EncastrementsDocumento17 páginasLes Liaisons Fixes Ou EncastrementsntayoubAinda não há avaliações
- Cours Modelisation Des LiaisonsDocumento4 páginasCours Modelisation Des LiaisonsAristide DOSSOUAinda não há avaliações
- TP Treuil EleveDocumento6 páginasTP Treuil ElevemidounAinda não há avaliações
- Coupe SimpleDocumento2 páginasCoupe SimplederwicheAinda não há avaliações
- Archiveur Multimedia MecaniqueDocumento3 páginasArchiveur Multimedia Mecaniquechaouch.najehAinda não há avaliações
- Les Éléments StandarsDocumento2 páginasLes Éléments StandarsMohsen LaabidiAinda não há avaliações
- Devoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFDocumento4 páginasDevoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFSimo StitAinda não há avaliações
- PHI-M211-liaison-pivot-tondeuse 2016Documento5 páginasPHI-M211-liaison-pivot-tondeuse 2016Francis BECAinda não há avaliações
- Cours MicrDocumento30 páginasCours MicrDOUNIAAinda não há avaliações
- TP3 Borne Réglable sujet+MEP PDFDocumento8 páginasTP3 Borne Réglable sujet+MEP PDFdiopAinda não há avaliações
- TCP-05-Rep-Projection-Orthogonale P 44Documento1 páginaTCP-05-Rep-Projection-Orthogonale P 44Jujo BugaAinda não há avaliações
- Cours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFDocumento8 páginasCours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFANDAHMOUAinda não há avaliações
- Cours Itec 1 Sti2D: Cinématique - Le Schéma CinématiqueDocumento4 páginasCours Itec 1 Sti2D: Cinématique - Le Schéma CinématiqueSophie RosiAinda não há avaliações
- QR42_P169BDocumento2 páginasQR42_P169BntayoubAinda não há avaliações
- QR26_P102Documento9 páginasQR26_P102ntayoubAinda não há avaliações
- QR13_P47-P61-P75-P86Documento8 páginasQR13_P47-P61-P75-P86ntayoubAinda não há avaliações
- 217049029-Isostatisme PpsDocumento79 páginas217049029-Isostatisme Ppslahcen_bahassouAinda não há avaliações
- QR10_P43-P57-P71-P82Documento2 páginasQR10_P43-P57-P71-P82ntayoubAinda não há avaliações
- Scénario Pédagogique GR Typoligies Dees Assemblages3tDocumento2 páginasScénario Pédagogique GR Typoligies Dees Assemblages3tntayoubAinda não há avaliações
- QR7_P35BDocumento2 páginasQR7_P35BntayoubAinda não há avaliações
- QR15 - P49H P63B P77B P87BDocumento6 páginasQR15 - P49H P63B P77B P87Blouaypro18Ainda não há avaliações
- Définition: Exemple: Pince de Préhension PneumatiqueDocumento4 páginasDéfinition: Exemple: Pince de Préhension Pneumatiquetesnimabidli255Ainda não há avaliações
- Ch1 l1 Analyse Fonctionnelle ExterneDocumento7 páginasCh1 l1 Analyse Fonctionnelle ExterneezzeddineAinda não há avaliações
- Chapitre 1 Classes Des Materiaux 2020Documento8 páginasChapitre 1 Classes Des Materiaux 2020Wael MaatougAinda não há avaliações
- QR9_P41-P55-P69-P80Documento4 páginasQR9_P41-P55-P69-P80ntayoubAinda não há avaliações
- Répartition Éxceptionnelle de Génie Mécanique 2020-2021Documento5 páginasRépartition Éxceptionnelle de Génie Mécanique 2020-2021lou louAinda não há avaliações
- 505267Documento74 páginas505267ntayoubAinda não há avaliações
- Ds N°3 1ère AnnéeDocumento4 páginasDs N°3 1ère AnnéentayoubAinda não há avaliações
- Me Technique de Fabrication D' Un MoulageDocumento7 páginasMe Technique de Fabrication D' Un Moulagentayoub100% (1)
- 7b PDFDocumento232 páginas7b PDFChokri JaballiAinda não há avaliações
- UtamDocumento14 páginasUtamntayoub0% (1)
- Transmissiondepuissance CoursDocumento2 páginasTransmissiondepuissance CoursntayoubAinda não há avaliações
- 2ème InfoDocumento112 páginas2ème Infontayoub100% (1)
- Translation ProfDocumento7 páginasTranslation Profntayoub100% (1)
- Formulaire de Mécanique PDFDocumento1 páginaFormulaire de Mécanique PDFjbcharpeAinda não há avaliações
- Documents SVT .PC .MathDocumento152 páginasDocuments SVT .PC .MathTrésor KoffiAinda não há avaliações
- HG EMC Serie Generale 1Documento8 páginasHG EMC Serie Generale 1Arthur CriereAinda não há avaliações
- Corrigé Fiche RecursivitéDocumento5 páginasCorrigé Fiche Recursivitébassirou kaneAinda não há avaliações
- kpg fr C epr2 2023Α 121856Documento2 páginaskpg fr C epr2 2023Α 121856Kostas AmanatidisAinda não há avaliações
- Developpement LmitesDocumento12 páginasDeveloppement LmitesJadli AissamAinda não há avaliações
- Planification Reseau MobileDocumento3 páginasPlanification Reseau MobileAnonymous xQL931pvTvAinda não há avaliações
- VinyleDocumento3 páginasVinylechristopheAinda não há avaliações
- Exam S6 1 Eco Gest 18 19Documento1 páginaExam S6 1 Eco Gest 18 19Amine StiouniAinda não há avaliações
- AwoumouDocumento15 páginasAwoumouresineAinda não há avaliações
- Guide Rédaction PFE, Mr. Abdellatif AbbesDocumento6 páginasGuide Rédaction PFE, Mr. Abdellatif AbbesAllani Ahmed Riadh100% (11)
- Bindjeme EllaDocumento5 páginasBindjeme EllaCrystal BskAinda não há avaliações
- Machine Thermique ExamDocumento4 páginasMachine Thermique ExamYassineHijazi100% (3)
- 34 ElectromecaniqueDocumento51 páginas34 ElectromecaniqueStairway To Heaven MoreAinda não há avaliações
- Chapitre 1 Généralité Sur Les Machines AsynchronesDocumento23 páginasChapitre 1 Généralité Sur Les Machines AsynchronesFiroDjinsoNano0% (1)
- Cours Complet de Stratif 2Documento109 páginasCours Complet de Stratif 2woodruff1986Ainda não há avaliações
- KRUPS EA8010 User GuideDocumento144 páginasKRUPS EA8010 User Guide79andiAinda não há avaliações
- Pathologie Et Renovation 1Documento38 páginasPathologie Et Renovation 1Zalvet ChristianAinda não há avaliações
- Ed 1476Documento2 páginasEd 1476Nabil SouissiAinda não há avaliações
- I-II Lois de L'optique GéométriqueDocumento7 páginasI-II Lois de L'optique Géométriquenakaruru55Ainda não há avaliações
- GELE5340 Notes5Documento32 páginasGELE5340 Notes5Theo WanAinda não há avaliações
- NF En12464-1Documento57 páginasNF En12464-1Hugo DEVIGEAinda não há avaliações