Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Personal Information Bianca David: First Name/ SurnameDocumento3 páginasPersonal Information Bianca David: First Name/ SurnameVictor ConstantinAinda não há avaliações
- AS5000-MS-20-150 Spec v0 1Documento7 páginasAS5000-MS-20-150 Spec v0 1Victor ConstantinAinda não há avaliações
- 4x7segment v1Documento1 página4x7segment v1Victor ConstantinAinda não há avaliações
- P287 DatasheetDocumento1 páginaP287 DatasheetVictor ConstantinAinda não há avaliações
- Chapter 70 Multi Mooring Systems 2010Documento135 páginasChapter 70 Multi Mooring Systems 2010Araby Gamal GamalAinda não há avaliações
- Group 15 - The Elements NitrogenDocumento19 páginasGroup 15 - The Elements NitrogenHarold Isai Silvestre GomezAinda não há avaliações
- A New Approach For Sizing Finger-Type (Multiple-Pipe) Slug CatchersDocumento9 páginasA New Approach For Sizing Finger-Type (Multiple-Pipe) Slug CatchersnicolasAinda não há avaliações
- Non Trailable2EnglishDocumento6 páginasNon Trailable2EnglishSuman ThakurAinda não há avaliações
- 7805 Regulator DescriptionDocumento4 páginas7805 Regulator DescriptionyeateshwarriorAinda não há avaliações
- RBK-PROC-MK3 Raychem MK3Documento83 páginasRBK-PROC-MK3 Raychem MK3VictorAinda não há avaliações
- iPLON ProfileDocumento11 páginasiPLON Profilesudhirm16Ainda não há avaliações
- External Interface (XINTF)Documento38 páginasExternal Interface (XINTF)AlonsoAinda não há avaliações
- Part Number 27-60 Revision B: Installation, Operation, and Maintenance With Illustrated Parts BreakdownDocumento66 páginasPart Number 27-60 Revision B: Installation, Operation, and Maintenance With Illustrated Parts BreakdownLuis Eduardo Albarracin RugelesAinda não há avaliações
- Educ 75 Activity 7Documento3 páginasEduc 75 Activity 7Gliecy OletaAinda não há avaliações
- Science Spoofs, Physics Pranks and Astronomical Antics: Docslugtoast@phas - Ubc.caDocumento30 páginasScience Spoofs, Physics Pranks and Astronomical Antics: Docslugtoast@phas - Ubc.cabeemanAinda não há avaliações
- Assign N LabDocumento4 páginasAssign N LabMtende MosesAinda não há avaliações
- EngView Folding CartonDocumento89 páginasEngView Folding CartonMarilyn AriasAinda não há avaliações
- Ch23 Review ProblemsDocumento25 páginasCh23 Review ProblemsحمدةالنهديةAinda não há avaliações
- NSSCO Chemistry SyllabusDocumento52 páginasNSSCO Chemistry SyllabusEbic GamerAinda não há avaliações
- Music: Teachers ManualDocumento208 páginasMusic: Teachers Manualmydrina100% (1)
- Jadual Seminar 1 0910Documento24 páginasJadual Seminar 1 0910ScalperAinda não há avaliações
- Source of HeatDocumento9 páginasSource of HeatSreekumar RajendrababuAinda não há avaliações
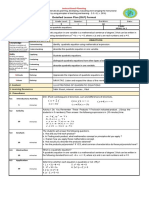
- Detailed Lesson Plan (DLP) Format: Nowledge ObjectivesDocumento2 páginasDetailed Lesson Plan (DLP) Format: Nowledge ObjectivesErwin B. NavarroAinda não há avaliações
- Aptitude Test For SimplificationDocumento24 páginasAptitude Test For SimplificationKodali NaniAinda não há avaliações
- Pretvorbe Merskih EnotDocumento4 páginasPretvorbe Merskih Enotpetrusa505Ainda não há avaliações
- HowToExcel Ebook - 50 Tips To Master Excel 2017-06-11Documento41 páginasHowToExcel Ebook - 50 Tips To Master Excel 2017-06-11Lakshmi MeruvaAinda não há avaliações
- Importance of ForecastingDocumento37 páginasImportance of ForecastingFaizan TafzilAinda não há avaliações
- Q2. Answer The Following Questions by Referring To The Tables Given Below. (15 Marks)Documento3 páginasQ2. Answer The Following Questions by Referring To The Tables Given Below. (15 Marks)ammar abbasAinda não há avaliações
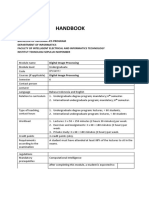
- IF184952 Digital Image ProcessingDocumento3 páginasIF184952 Digital Image Processingshela malaAinda não há avaliações
- ISO-14236-2000 Traducido EspañolDocumento11 páginasISO-14236-2000 Traducido EspañolPablo A.100% (1)
- 1979 IC MasterDocumento2.398 páginas1979 IC MasterIliuta JohnAinda não há avaliações
- SimulatorHW MidSize dSPACE Catalog 2008Documento4 páginasSimulatorHW MidSize dSPACE Catalog 2008Ram Krishan SharmaAinda não há avaliações
- Cuda GDBDocumento64 páginasCuda GDBVinícius LisboaAinda não há avaliações
- En Novatop ElementDocumento32 páginasEn Novatop ElementLucian CiprianAinda não há avaliações