Você também pode gostar
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109No EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Ainda não há avaliações
- M083 UD6 E5 Yady SuarezDocumento1 páginaM083 UD6 E5 Yady Suarezyacasugo100% (1)
- Deber 1 Energia Eolica Karen QuispeDocumento5 páginasDeber 1 Energia Eolica Karen Quispejorgefromanm8Ainda não há avaliações
- RobotStudio: simulador de robots industrialesDocumento6 páginasRobotStudio: simulador de robots industrialesAdriana MartzAinda não há avaliações
- Configura PLC Allen Bradley L32E para programaciónDocumento20 páginasConfigura PLC Allen Bradley L32E para programaciónJuan AlardínAinda não há avaliações
- Es Un Sensor de Temperatura Simple Hecho Con Un LM35 y Un PIC16F873A Que Expresará La Temperatura Medida en Un Display LCD de 16x2Documento9 páginasEs Un Sensor de Temperatura Simple Hecho Con Un LM35 y Un PIC16F873A Que Expresará La Temperatura Medida en Un Display LCD de 16x2Jhonny Jhon Laguna LimahuayaAinda não há avaliações
- M083 UD6 E4 Yady SuárezDocumento13 páginasM083 UD6 E4 Yady SuárezCarolina Suárez100% (5)
- Romero - Bermeo - Evelyn - Actividad 1Documento15 páginasRomero - Bermeo - Evelyn - Actividad 1Juiana RomeroAinda não há avaliações
- PM5110Documento17 páginasPM5110Robinson Ramirez SanchezAinda não há avaliações
- Capitulo I Nuevo Proyecto RSLogix 5000Documento11 páginasCapitulo I Nuevo Proyecto RSLogix 5000ZiniaVelázquezTorresAinda não há avaliações
- ServiceManual UR3 Es 3.2.6 PDFDocumento178 páginasServiceManual UR3 Es 3.2.6 PDFNestor Andres Preciado SicuamiaAinda não há avaliações
- Capitulo 9Documento27 páginasCapitulo 9zakty_182Ainda não há avaliações
- Proyecto Final RoboticaDocumento22 páginasProyecto Final RoboticaDavid RojasAinda não há avaliações
- Configura PLC y Factory I/ODocumento13 páginasConfigura PLC y Factory I/ODANIEL DRACOAinda não há avaliações
- Modos de DireccionamientoDocumento25 páginasModos de DireccionamientoMauricioAinda não há avaliações
- Grafcet PDFDocumento9 páginasGrafcet PDFCristina Bermúdez CuelloAinda não há avaliações
- Practica 05 - Introduccion A La Programacion de FPGAsDocumento6 páginasPractica 05 - Introduccion A La Programacion de FPGAsJoel AmezquitaAinda não há avaliações
- Infoplc Net Manual Formacion Vijeo DesignerDocumento130 páginasInfoplc Net Manual Formacion Vijeo DesignerCristóbal Eduardo Carreño MosqueiraAinda não há avaliações
- Configurar rutas estáticas IPv4 en Packet TracerDocumento4 páginasConfigurar rutas estáticas IPv4 en Packet TracerdanielAinda não há avaliações
- Busqueda No Informada - IADocumento8 páginasBusqueda No Informada - IAFran PulidoAinda não há avaliações
- Tarea Simulacion Digital (Cuestionario)Documento1 páginaTarea Simulacion Digital (Cuestionario)cristhopher_hernandeAinda não há avaliações
- Construccion de Sonotrodos PDFDocumento57 páginasConstruccion de Sonotrodos PDFandres felipe acevedo pulidoAinda não há avaliações
- Acceso Datos Instrumento InteligenteDocumento30 páginasAcceso Datos Instrumento Inteligentepablosky33Ainda não há avaliações
- Laboratorio 1 Estaciones Mps - CirosDocumento9 páginasLaboratorio 1 Estaciones Mps - Cirosjankarlo arevaloAinda não há avaliações
- Proyecto Final Automatizaci N IndustrialDocumento15 páginasProyecto Final Automatizaci N IndustrialIsa ReyesAinda não há avaliações
- S5 - Tarea - Set - A - Labplc1301 (040722)Documento3 páginasS5 - Tarea - Set - A - Labplc1301 (040722)Pablo InzunzaAinda não há avaliações
- Vision ArtificialDocumento23 páginasVision ArtificialNatalia G LazcanoAinda não há avaliações
- Práctica Seguridad GNS3Documento39 páginasPráctica Seguridad GNS3Andrés Felipe Gamboa TorresAinda não há avaliações
- Examen Final de Automatizacion 2017-1Documento3 páginasExamen Final de Automatizacion 2017-1Angel Ortiz HurtadoAinda não há avaliações
- Comunicaciones Industriales 4 Conexion Ethernet MicroLogixDocumento23 páginasComunicaciones Industriales 4 Conexion Ethernet MicroLogixRicardo ZzeroAinda não há avaliações
- Práctica 6 Led RGB Interactivo Con PulsadoresDocumento6 páginasPráctica 6 Led RGB Interactivo Con PulsadoresTranquilino Guzmán VázquezAinda não há avaliações
- Guía de Primeros Pasos Con CMMT-As-PN - Rev3Documento20 páginasGuía de Primeros Pasos Con CMMT-As-PN - Rev3Tomas GVAinda não há avaliações
- Contador ArduinoDocumento1 páginaContador ArduinoalanitotkdAinda não há avaliações
- Data ArduinoDocumento30 páginasData ArduinoA Juan Carlos LópezAinda não há avaliações
- Ejercicio 2 T1 SMR PDFDocumento1 páginaEjercicio 2 T1 SMR PDFMaria planellerAinda não há avaliações
- CNC Motion Control con PLC S7 1200Documento110 páginasCNC Motion Control con PLC S7 1200Carlos GranceAinda não há avaliações
- M083 Ud6 E4Documento2 páginasM083 Ud6 E4Mary jane25% (4)
- Estación de ClasificaciónDocumento3 páginasEstación de ClasificaciónJair Yanguicela100% (1)
- Un Problema de Maximización (Análisis Gráfico de Sensibilidad) PDFDocumento13 páginasUn Problema de Maximización (Análisis Gráfico de Sensibilidad) PDFJaimeMolinaAinda não há avaliações
- Simulación Server OPC+clienteOPC - Server - ABBDocumento22 páginasSimulación Server OPC+clienteOPC - Server - ABBJose Antonio MercadoAinda não há avaliações
- Funcionamiento del programa plc delta Control On-Off proporcionalDocumento9 páginasFuncionamiento del programa plc delta Control On-Off proporcionalAriel GálvezAinda não há avaliações
- Direccionamiento Indirecto Step 7Documento14 páginasDireccionamiento Indirecto Step 7José Luis Rosales GonzálezAinda não há avaliações
- AVR Practica 2 - InterrupcionesDocumento6 páginasAVR Practica 2 - InterrupcionesLiiz SarabiaAinda não há avaliações
- RRN en C++Documento11 páginasRRN en C++Emmanuel BeltranAinda não há avaliações
- PLC actividad 1Documento13 páginasPLC actividad 1Julian Zapata RestrepoAinda não há avaliações
- Enlace Arduino - Matlab PDFDocumento3 páginasEnlace Arduino - Matlab PDFXavier MarinAinda não há avaliações
- CONVERSIONES A/D Y D/ADocumento6 páginasCONVERSIONES A/D Y D/AManuel HerreraAinda não há avaliações
- Teclado matricial 4x4 guíaDocumento9 páginasTeclado matricial 4x4 guíaBreyner Oroya Cruz100% (1)
- 01 Movimiento Manual Del Robot Con El JoystickDocumento17 páginas01 Movimiento Manual Del Robot Con El JoystickJose Manuel Moa PerezAinda não há avaliações
- Manual RoboCellDocumento43 páginasManual RoboCellpeluvemo11Ainda não há avaliações
- Control de robots y sistemas sensorialesDocumento14 páginasControl de robots y sistemas sensorialeselmacuarro5Ainda não há avaliações
- Rapid SplitDocumento5 páginasRapid SplitAlma ArellanoAinda não há avaliações
- RapidDocumento26 páginasRapidHiroshi KannoAinda não há avaliações
- Como Realizar Un ProgramaDocumento5 páginasComo Realizar Un Programaisraelpilin123Ainda não há avaliações
- Efectores y PrecisionDocumento29 páginasEfectores y PrecisionEli D'KidAinda não há avaliações
- Curso Basico Robot Fanuc UpaDocumento57 páginasCurso Basico Robot Fanuc UpaRene Axel Montes RochaAinda não há avaliações
- Estructura de Un Robot IndustrialDocumento22 páginasEstructura de Un Robot IndustrialMiroslava GalvánAinda não há avaliações
- Foro Robotica IndDocumento16 páginasForo Robotica IndJeffrey Vasquez GonzálezAinda não há avaliações
- Trabajo Final 1 RobotDocumento24 páginasTrabajo Final 1 RobotJeffrey Vasquez González0% (1)
- RASPADORES SECUNDARIOS 20071284 - BA - ReinigerCSS7 - Tecnipak - Es PDFDocumento7 páginasRASPADORES SECUNDARIOS 20071284 - BA - ReinigerCSS7 - Tecnipak - Es PDFespinozcristian100% (1)
- PRUEBAS DE HIPOTESIS Media y ProporcionesDocumento9 páginasPRUEBAS DE HIPOTESIS Media y ProporcionesLuis MGAinda não há avaliações
- Bombas Serie y Paralelo Maquinas Iguales y Diferentes - CuevasDocumento4 páginasBombas Serie y Paralelo Maquinas Iguales y Diferentes - CuevasMiguel Angel Cuevas HernándezAinda não há avaliações
- Administración de La Producción Ejercicios IIDocumento94 páginasAdministración de La Producción Ejercicios IIAdrián MendozaAinda não há avaliações
- Evaluacion Final de EpistemologiaDocumento6 páginasEvaluacion Final de EpistemologiaJorgeEliecerAguilarBarrosAinda não há avaliações
- Estadistica IIDocumento9 páginasEstadistica IIMiller EstevezAinda não há avaliações
- Informe Mru y MruaDocumento5 páginasInforme Mru y MruaCamilo MonaAinda não há avaliações
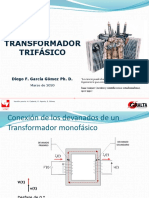
- Curso Trafos T8 El Transformador Trifásico - Grupos de Conexion - 02 - 2013Documento84 páginasCurso Trafos T8 El Transformador Trifásico - Grupos de Conexion - 02 - 2013NICOLÁS MARÍN SAAVEDRAAinda não há avaliações
- Método de Gauss: matriz inversa multiplicativaDocumento6 páginasMétodo de Gauss: matriz inversa multiplicativaEmmanuel NolascoAinda não há avaliações
- Mallas Matematicas 4° 06012022Documento21 páginasMallas Matematicas 4° 06012022NAZARENO DE JESUS GARCIA RICOAinda não há avaliações
- Modulación PWM con ATmega8Documento42 páginasModulación PWM con ATmega8Jose Ruben TorresHortaAinda não há avaliações
- Resonancia Eléctrica y Circuitos LCDocumento5 páginasResonancia Eléctrica y Circuitos LCCarlos BulnesAinda não há avaliações
- CalculoDocumento10 páginasCalculoDayana González RodríguezAinda não há avaliações
- Actividad 2 Matematicas 25-07-20Documento7 páginasActividad 2 Matematicas 25-07-20Frank Valdivia MartinezAinda não há avaliações
- 3º Seminario de Trigonometría PREUNIVERSITARIO-2007-II-Sara PDFDocumento11 páginas3º Seminario de Trigonometría PREUNIVERSITARIO-2007-II-Sara PDFRicardo RuizAinda não há avaliações
- Enunciado EsencialDocumento5 páginasEnunciado EsencialMiguel RamosAinda não há avaliações
- Linealización de Modelos PDFDocumento24 páginasLinealización de Modelos PDFGuillermo Castro ContardoAinda não há avaliações
- Geometria DescartesDocumento95 páginasGeometria DescartesLina Marcela Diaz100% (2)
- Evaluación Parcial 1 Metodos Cuantitativos-1591495617Documento2 páginasEvaluación Parcial 1 Metodos Cuantitativos-1591495617Christian AyluardoAinda não há avaliações
- Introduccionaladivulgacionescrita 10-22Documento13 páginasIntroduccionaladivulgacionescrita 10-22Peter ParkerAinda não há avaliações
- La Ley DistributivaDocumento7 páginasLa Ley DistributivaAaron Argenis Amador AbrilAinda não há avaliações
- Evaluación recursos reservas EDADocumento36 páginasEvaluación recursos reservas EDAkrisnnaAinda não há avaliações
- MRU y MRUV 2018Documento5 páginasMRU y MRUV 2018andresAinda não há avaliações
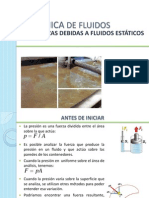
- 04 Fuerzas Debidas A Fluidos EstaticosDocumento21 páginas04 Fuerzas Debidas A Fluidos EstaticosAntonio Aversa100% (1)
- Función ExponencialDocumento11 páginasFunción ExponencialRoberto C. Caballero F100% (2)
- Estadistica 2-G10-Taller 5Documento30 páginasEstadistica 2-G10-Taller 5los pro original100% (1)
- TareaDocumento5 páginasTareacaracuel2003Ainda não há avaliações
- Estudio Técnico para El Incremento Del Potencial de Producción Mediante Aplicación de "Fracturamiento Hidráulico en El Pozo DRD-X1001"Documento180 páginasEstudio Técnico para El Incremento Del Potencial de Producción Mediante Aplicación de "Fracturamiento Hidráulico en El Pozo DRD-X1001"fabita guzman100% (4)
- Halliday M.A.K: "El Lenguaje Como Semiótica Social" ResumenDocumento6 páginasHalliday M.A.K: "El Lenguaje Como Semiótica Social" ResumenAzul Arrieta100% (1)
- Guia 13 Ecuacion CuadraticaDocumento16 páginasGuia 13 Ecuacion CuadraticadanieladiegoAinda não há avaliações
- Influencia. La psicología de la persuasiónNo EverandInfluencia. La psicología de la persuasiónNota: 4.5 de 5 estrelas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másNo EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másNota: 2.5 de 5 estrelas2.5/5 (3)
- Cuántica: Qué significa la teoría de la ciencia más extrañaNo EverandCuántica: Qué significa la teoría de la ciencia más extrañaNota: 1 de 5 estrelas1/5 (1)
- Auditoría de seguridad informática: Curso prácticoNo EverandAuditoría de seguridad informática: Curso prácticoNota: 5 de 5 estrelas5/5 (1)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaNo EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaNota: 5 de 5 estrelas5/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaNo EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaNota: 4.5 de 5 estrelas4.5/5 (116)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.No EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Nota: 4 de 5 estrelas4/5 (51)
- Reparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DNo EverandReparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DNota: 5 de 5 estrelas5/5 (6)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroNo EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroNota: 4 de 5 estrelas4/5 (1)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...No EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Nota: 5 de 5 estrelas5/5 (4)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetNo EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetNota: 5 de 5 estrelas5/5 (7)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasNo EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasNota: 4.5 de 5 estrelas4.5/5 (14)
- Cómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaNo EverandCómo Seducir Mujeres con tu Celular: Envía poderosos mensajes de texto que cautivarán a las mujeres que siempre has deseado tener en tu vidaNota: 4 de 5 estrelas4/5 (9)
- El trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoNo EverandEl trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoNota: 4 de 5 estrelas4/5 (30)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoNo EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoAinda não há avaliações
- Inteligencia artificial: La guía completa para principiantes del futuro de la IANo EverandInteligencia artificial: La guía completa para principiantes del futuro de la IANota: 1 de 5 estrelas1/5 (1)
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.No EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Nota: 3.5 de 5 estrelas3.5/5 (3)
- Guía de HTML5, CSS3 y Javascript. La Web 2.0No EverandGuía de HTML5, CSS3 y Javascript. La Web 2.0Nota: 3.5 de 5 estrelas3.5/5 (2)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.No EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Nota: 4.5 de 5 estrelas4.5/5 (54)
- Diseño de arquitecturas .NET orientadas a microserviciosNo EverandDiseño de arquitecturas .NET orientadas a microserviciosNota: 3 de 5 estrelas3/5 (1)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosNo Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosNota: 5 de 5 estrelas5/5 (1)