Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Type A Power Generating Modules: Engineering Recommendation G99 Form A2-3Documento13 páginasType A Power Generating Modules: Engineering Recommendation G99 Form A2-3David GarciaAinda não há avaliações
- Hybrid Rooftop Solar Power Electrical Installation Certificate For Inspection and Testing (Annex 4)Documento4 páginasHybrid Rooftop Solar Power Electrical Installation Certificate For Inspection and Testing (Annex 4)Sampath HemasingheAinda não há avaliações
- IEEE-A Primer On Capacitor Bank ProtectionDocumento6 páginasIEEE-A Primer On Capacitor Bank ProtectionGustavo AguayoAinda não há avaliações
- SLS 40 ELE CAL 002 Cable Sizing CalculationDocumento10 páginasSLS 40 ELE CAL 002 Cable Sizing Calculationmringkel50% (2)
- 5 Electricity - With GRESADocumento15 páginas5 Electricity - With GRESADianne CalladaAinda não há avaliações
- Load Flow Analysis Of132/11Kv Substation Using Etap: A Case StudyDocumento10 páginasLoad Flow Analysis Of132/11Kv Substation Using Etap: A Case Studydsanmi1234Ainda não há avaliações
- AN4104 Forward Converter Type PC SMPS With FPS: Sangtae-Im PD DivisionDocumento17 páginasAN4104 Forward Converter Type PC SMPS With FPS: Sangtae-Im PD DivisionJose Miguel Rodriguez CarreñoAinda não há avaliações
- Electro Pneumatics StudentDocumento24 páginasElectro Pneumatics StudentbooAinda não há avaliações
- An Overview of Grid-Forming Control For Wind Turbine ConvertersDocumento6 páginasAn Overview of Grid-Forming Control For Wind Turbine ConvertersGabriel VilknAinda não há avaliações
- Power Con CorpDocumento2 páginasPower Con Corpkhan4luvAinda não há avaliações
- Unit 7 Economics of Power GenerationDocumento22 páginasUnit 7 Economics of Power Generationbhaskar123321Ainda não há avaliações
- Technical Specifications of Transformers: Applicable Codes and Standards For TransformersDocumento5 páginasTechnical Specifications of Transformers: Applicable Codes and Standards For TransformersNnaabyendu SahaAinda não há avaliações
- SIE FL SurgeProtection TPS3 01Documento4 páginasSIE FL SurgeProtection TPS3 01senthilonlineAinda não há avaliações
- Substation Designing BasicsDocumento47 páginasSubstation Designing Basicsbhuvana_eee100% (2)
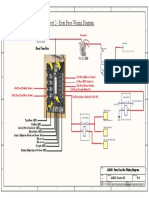
- Sheet 2 - Rear Fuse Box WiringDocumento1 páginaSheet 2 - Rear Fuse Box WiringSuthahar SundrabaluAinda não há avaliações
- DVR Dstatcom Detailed InformationDocumento17 páginasDVR Dstatcom Detailed InformationSuneel Kumar MauryaAinda não há avaliações
- NAC20-33K-DT User ManualDocumento21 páginasNAC20-33K-DT User ManualWaldemar Alvares RezendeAinda não há avaliações
- Hyundai HGMAP Protection RelayDocumento22 páginasHyundai HGMAP Protection RelayminpyitAinda não há avaliações
- MTL 5017Documento1 páginaMTL 5017Royalty GouldAinda não há avaliações
- 2 Power GenerationDocumento46 páginas2 Power GenerationHermain Fayyaz KarimAinda não há avaliações
- 6 Inverter 1Documento45 páginas6 Inverter 1MD. SADEKUL ISLAM RIMON 1502084Ainda não há avaliações
- Substation Inspection Report - KhaliDocumento3 páginasSubstation Inspection Report - KhaliRahul GagareAinda não há avaliações
- LI BB Sensitivity & Satability Test Report Rev NEW FORMDocumento5 páginasLI BB Sensitivity & Satability Test Report Rev NEW FORMRK KAinda não há avaliações
- Transformer Diff Prot-Rev 1Documento31 páginasTransformer Diff Prot-Rev 1Anonymous YWDRaCkS100% (2)
- 220v DC CHP Battery Bank and Charger Sizing CalculationDocumento6 páginas220v DC CHP Battery Bank and Charger Sizing CalculationPrashantKumar100% (1)
- UGZ D2 - Double Pole Voltage Transformer (1/2) : Technical SpecificationsDocumento2 páginasUGZ D2 - Double Pole Voltage Transformer (1/2) : Technical SpecificationsjeanAinda não há avaliações
- Baterai Agm-Vrla (Inpowers) (Gp-Series) 12v Agm BatteryDocumento2 páginasBaterai Agm-Vrla (Inpowers) (Gp-Series) 12v Agm BatteryFaiz HuseinAinda não há avaliações
- ATX To Lab Bench Power Supply ConversionDocumento22 páginasATX To Lab Bench Power Supply ConversionMaria PiresAinda não há avaliações
- PPM Checklist: Ref NoDocumento2 páginasPPM Checklist: Ref NoNithin SudarshanAinda não há avaliações
- S Instructions: Installation / Operation / MaintenanceDocumento27 páginasS Instructions: Installation / Operation / MaintenanceEduardo CordovaAinda não há avaliações