Você também pode gostar
- Examen Cap Emt PRL IgualdadDocumento17 páginasExamen Cap Emt PRL IgualdadEduardo Verdes100% (5)
- Robot Industrial Pesado y Manufactura PDFDocumento5 páginasRobot Industrial Pesado y Manufactura PDFAndres BatistaAinda não há avaliações
- Codigo P2004 Dodge Caliber 2007Documento6 páginasCodigo P2004 Dodge Caliber 2007Gregory MarchanAinda não há avaliações
- Ia, Inteligencia Artificial, Unidad 5.Documento46 páginasIa, Inteligencia Artificial, Unidad 5.Neutro Crew SneAinda não há avaliações
- ¿Qué Es La RobóticaDocumento2 páginas¿Qué Es La Robóticatami villcaAinda não há avaliações
- Robotica - Aplicacion - Domestica e IndustrialDocumento39 páginasRobotica - Aplicacion - Domestica e Industrialanon_554002078Ainda não há avaliações
- IA - Robótica en La ConstrucciónDocumento5 páginasIA - Robótica en La ConstrucciónAlberto SalazarAinda não há avaliações
- Inteligencia Artificial y Robótica en La ConstrucciónDocumento5 páginasInteligencia Artificial y Robótica en La ConstrucciónAlberto SalazarAinda não há avaliações
- Tarea 2Documento10 páginasTarea 2karinalizethramirezmayo1Ainda não há avaliações
- Robótica Aplicada A La Ingenieria MecánicaDocumento12 páginasRobótica Aplicada A La Ingenieria MecánicaJonathan VenturaAinda não há avaliações
- Tarea 2Documento9 páginasTarea 2karinalizethramirezmayo1Ainda não há avaliações
- Robots InsdustrialesDocumento17 páginasRobots Insdustrialesangela beatriz acuña huamanAinda não há avaliações
- ROBÓTICADocumento6 páginasROBÓTICANori CrespoAinda não há avaliações
- Investigacion Unidad 2Documento12 páginasInvestigacion Unidad 2Francisco javier Antonio ToalaAinda não há avaliações
- RobóticaDocumento4 páginasRobóticaJesús DíazAinda não há avaliações
- Pia Expresion Idc WRDocumento6 páginasPia Expresion Idc WRMauricio Alexander Martinez ArredondoAinda não há avaliações
- Aplicacion de Los RobotsDocumento9 páginasAplicacion de Los RobotsKatherine Pollita LrkAinda não há avaliações
- Aplicaciones de La Robótica en La ActualidadDocumento4 páginasAplicaciones de La Robótica en La Actualidadvanessa cantosAinda não há avaliações
- Robtica Industrial IIDocumento15 páginasRobtica Industrial IIarturo breppeAinda não há avaliações
- Tipos de Robots Que ExistenDocumento25 páginasTipos de Robots Que Existenwalter molinaAinda não há avaliações
- Robotic ADocumento7 páginasRobotic Asky blueAinda não há avaliações
- Robotica 1Documento4 páginasRobotica 1Markino Surco BlancoAinda não há avaliações
- Aplicación de La Robótica en La IndustriaDocumento16 páginasAplicación de La Robótica en La IndustriaMario CAlAinda não há avaliações
- Robot Seguidor de LineaDocumento14 páginasRobot Seguidor de LineaMaria100% (1)
- Robotica en La Industria y Regla de JacksonDocumento30 páginasRobotica en La Industria y Regla de JacksonlorenaAinda não há avaliações
- Brazo RoboticoDocumento4 páginasBrazo RoboticoCESAR VARGASAinda não há avaliações
- Investigación Unidad VDocumento3 páginasInvestigación Unidad VZyan RamosAinda não há avaliações
- Informe Introducción A La Robótica IndustrialDocumento2 páginasInforme Introducción A La Robótica IndustrialFernando Ebensperger100% (1)
- Mercado y Tendencias de La Robótica A Nivel Industrial Futuro de La RobóticaDocumento6 páginasMercado y Tendencias de La Robótica A Nivel Industrial Futuro de La RobóticaJavier GamboaAinda não há avaliações
- Presentacion FinalDocumento7 páginasPresentacion FinalEnrique De La Rosa VasquezAinda não há avaliações
- Practica2 CEMLDocumento5 páginasPractica2 CEMLCRISTOPHER EMMANUEL MU�OZ LOPEZAinda não há avaliações
- 19-EISN-1-026 - Ensayo (Clase 7)Documento7 páginas19-EISN-1-026 - Ensayo (Clase 7)David BaezAinda não há avaliações
- Robótica InformeDocumento10 páginasRobótica Informeamanda belénAinda não há avaliações
- Informe Estado Del Arte de La Robotica IndustrialDocumento23 páginasInforme Estado Del Arte de La Robotica Industrialmarco olmosAinda não há avaliações
- Robotic ADocumento9 páginasRobotic ADerkis MarcanoAinda não há avaliações
- Wa0005Documento12 páginasWa0005Mari ElstonAinda não há avaliações
- La RoboticaDocumento4 páginasLa RoboticaAngel AguilarAinda não há avaliações
- La RobóticaDocumento12 páginasLa RobóticaAGUADO MENDOZA Mery Alejandra - EstudianteAinda não há avaliações
- Fundamentos de RoboticaDocumento128 páginasFundamentos de RoboticaXIMO100% (1)
- Tarea 1Documento4 páginasTarea 1Luis Alberto Garcia AltamiranoAinda não há avaliações
- Robótica y Aplicaciones La MineríaDocumento8 páginasRobótica y Aplicaciones La MineríaJesús DíazAinda não há avaliações
- Maqmin 23 14 Robótica en MineríaDocumento19 páginasMaqmin 23 14 Robótica en MineríaCRISTIAN ANTONIO PEREZ ATENCIAAinda não há avaliações
- Taller de Tecnologia Grado 10Documento3 páginasTaller de Tecnologia Grado 10XaBy Lds OrtizAinda não há avaliações
- WP Robots V01 2019Documento11 páginasWP Robots V01 2019rubenAinda não há avaliações
- Electiva II - C1-20%Documento7 páginasElectiva II - C1-20%CloudsAinda não há avaliações
- La Robótica en El Siglo 21Documento3 páginasLa Robótica en El Siglo 21Luis AguilarAinda não há avaliações
- Ensayo Sobre RoboticaDocumento8 páginasEnsayo Sobre RoboticaAngel Jrs GuzmanAinda não há avaliações
- Proyecto de RoboticaDocumento4 páginasProyecto de RoboticaUlises UrgilesAinda não há avaliações
- Parte de La Tercera EntregaDocumento2 páginasParte de La Tercera EntregatumamadkAinda não há avaliações
- Robotica DanielDocumento12 páginasRobotica DanielDaniel LugoAinda não há avaliações
- PDF Taller de Tecnologia Grado 10 DDDocumento3 páginasPDF Taller de Tecnologia Grado 10 DDRafael Castañeda duqueAinda não há avaliações
- Actividad 2Documento10 páginasActividad 2Francisco Javier Bañuelos MonteroAinda não há avaliações
- Desarrollo de Un Sistema Experto para Un Brazo k680 SterenDocumento7 páginasDesarrollo de Un Sistema Experto para Un Brazo k680 SterenArturo Octavio Vazquez TorresAinda não há avaliações
- Tarea Investigacion (Robots)Documento7 páginasTarea Investigacion (Robots)Eduardo Daniel Hernández MelladoAinda não há avaliações
- Desarrollo de La IndustiralizacionDocumento7 páginasDesarrollo de La IndustiralizacionAari SosaAinda não há avaliações
- Robotica Inteligencia ArtificialDocumento14 páginasRobotica Inteligencia Artificialequipo7uft blog100% (1)
- Practica2 MargDocumento6 páginasPractica2 MargMario GonzálezAinda não há avaliações
- La Robotica Paola CVDocumento10 páginasLa Robotica Paola CVVioleta RamosAinda não há avaliações
- Robotic ADocumento19 páginasRobotic AwebavatarAinda não há avaliações
- Robótica Ig Jesus ValerDocumento5 páginasRobótica Ig Jesus Valerspiderjesus1.5Ainda não há avaliações
- Resumen de ExposicionesDocumento11 páginasResumen de ExposicionesAbi More MioAinda não há avaliações
- Focs Manual IT EN FR DE ES PT PDFDocumento74 páginasFocs Manual IT EN FR DE ES PT PDFwuasichuAinda não há avaliações
- Orden 292 de 19 de Octubre de 2023 Jueves 01Documento59 páginasOrden 292 de 19 de Octubre de 2023 Jueves 01El SenseiAinda não há avaliações
- 4400238214-Mec-003 Estàndar Cambio Aceite Equipos Rastra EspesadoresDocumento2 páginas4400238214-Mec-003 Estàndar Cambio Aceite Equipos Rastra EspesadoresSylvia Fuentes PigattiAinda não há avaliações
- Maquina SimplesDocumento27 páginasMaquina SimplesJuan HinostrozaAinda não há avaliações
- Prostar SEDocumento360 páginasProstar SEJoséAinda não há avaliações
- Carta de AutorizaciónDocumento1 páginaCarta de Autorizaciónlfre121818Ainda não há avaliações
- Protección de Secuencia Inversa en GeneradoresDocumento4 páginasProtección de Secuencia Inversa en GeneradoresSuterm SeccionAinda não há avaliações
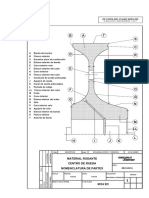
- PLANO NEFA - 925 Nomenclatura de Centro de RuedaDocumento1 páginaPLANO NEFA - 925 Nomenclatura de Centro de RuedaNico persicoAinda não há avaliações
- Gráfica Del Campo de TrabajoDocumento1 páginaGráfica Del Campo de TrabajoJuanjoAinda não há avaliações
- Electricidad y Electronica Del Automovil PDFDocumento1 páginaElectricidad y Electronica Del Automovil PDFlinadubrascaAinda não há avaliações
- PDF Control de Combustible en ExcelDocumento1 páginaPDF Control de Combustible en ExcelCONTADORES ASOCIADOS MAC&MAinda não há avaliações
- Nuevos Modelos Organizativos PDFDocumento25 páginasNuevos Modelos Organizativos PDFVivian Mendez100% (2)
- HSEQ-FO-030 Inspeccion Vehiculo LivianoDocumento1 páginaHSEQ-FO-030 Inspeccion Vehiculo LivianoDaniela Avila GarciaAinda não há avaliações
- Curso CortocircuitoDocumento161 páginasCurso Cortocircuitogilbertomjc100% (1)
- GetzDocumento2 páginasGetzDario CollahuazoAinda não há avaliações
- MMMMDocumento4 páginasMMMMJhojan Arley Lucio LinaresAinda não há avaliações
- Camiones SchenkerDocumento1 páginaCamiones SchenkerjoaquinAinda não há avaliações
- Tomoi Fis 5to Cap1Documento17 páginasTomoi Fis 5to Cap1CLAUDIO ROGELIO PALACIOS SANCHEZAinda não há avaliações
- Practica 2 Neumática e HidráulicaDocumento10 páginasPractica 2 Neumática e HidráulicaLópez Torres BrendaAinda não há avaliações
- 3) MotorDocumento114 páginas3) Motorguillermo6661Ainda não há avaliações
- INFORME Pedro MOTORESDocumento37 páginasINFORME Pedro MOTORESLizbeth LizAinda não há avaliações
- Avance 3 de Situación ProblemaDocumento17 páginasAvance 3 de Situación Problemaa01663882Ainda não há avaliações
- Pauta GrooveDocumento6 páginasPauta GrooveYeisson MirandaAinda não há avaliações
- B8R Euro 6Documento2 páginasB8R Euro 6Cesar AntonioAinda não há avaliações
- Optimización Sistema Vapor RecopeDocumento113 páginasOptimización Sistema Vapor RecopeGustavo Alonso Cappa SalasAinda não há avaliações
- Informe de "Materiales Aplicados A La Fabricación de Bastidores Automotrices Acero, Aluminio, Fibra de Carbón, Fibra de Vidrio, Polímeros"Documento15 páginasInforme de "Materiales Aplicados A La Fabricación de Bastidores Automotrices Acero, Aluminio, Fibra de Carbón, Fibra de Vidrio, Polímeros"Fernando StevenAinda não há avaliações
- 3-EJ-SOP004 PROCEDIMIENTO LUBRICACIÓN Rev01Documento9 páginas3-EJ-SOP004 PROCEDIMIENTO LUBRICACIÓN Rev01Lucia MejiaAinda não há avaliações
- Equipos y Maquinaria HGDocumento33 páginasEquipos y Maquinaria HGJhon EdwardAinda não há avaliações