Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Akilas Mebrahtom ResumeDocumento1 páginaAkilas Mebrahtom ResumeAnonymous lLpBfQAinda não há avaliações
- William Hallett - BiographyDocumento2 páginasWilliam Hallett - Biographyapi-215611511Ainda não há avaliações
- MS Lync - Exchange - IntegrationDocumento29 páginasMS Lync - Exchange - IntegrationCristhian HaroAinda não há avaliações
- BSH 7005-15Documento129 páginasBSH 7005-15Mark InnesAinda não há avaliações
- Alphabetic KnowledgeDocumento8 páginasAlphabetic KnowledgejsdgjdAinda não há avaliações
- Seizure Control Status and Associated Factors Among Patients With Epilepsy. North-West Ethiopia'Documento14 páginasSeizure Control Status and Associated Factors Among Patients With Epilepsy. North-West Ethiopia'Sulaman AbdelaAinda não há avaliações
- EngHub How To Break HabitsDocumento13 páginasEngHub How To Break HabitsViktoria NovikovaAinda não há avaliações
- PreviewpdfDocumento29 páginasPreviewpdfSoemarlan ErlanAinda não há avaliações
- Priest, Graham - The Logic of The Catuskoti (2010)Documento31 páginasPriest, Graham - The Logic of The Catuskoti (2010)Alan Ruiz100% (1)
- Drager Narkomed 6400 Field Service Procedure Software Version 4.02 EnhancementDocumento24 páginasDrager Narkomed 6400 Field Service Procedure Software Version 4.02 EnhancementAmirAinda não há avaliações
- Table of Specification 1st QDocumento5 páginasTable of Specification 1st QVIRGILIO JR FABIAinda não há avaliações
- Adaptive Leadership: Leadership: Theory and PracticeDocumento14 páginasAdaptive Leadership: Leadership: Theory and PracticeJose Daniel Quintero100% (1)
- Cool Fire Manual 45M620N2UK 01 PDFDocumento198 páginasCool Fire Manual 45M620N2UK 01 PDFPaun MihaiAinda não há avaliações
- Final Self Hypnosis Paperback For PrintDocumento150 páginasFinal Self Hypnosis Paperback For PrintRic Painter100% (12)
- Presenters: Horace M. Estrella Jay Mart A. Lazana Princess Camille R. HipolitoDocumento23 páginasPresenters: Horace M. Estrella Jay Mart A. Lazana Princess Camille R. HipolitoHorace EstrellaAinda não há avaliações
- Song LyricsDocumento13 páginasSong LyricsCyh RusAinda não há avaliações
- Bossypants Autobiography and Womens SelvesDocumento26 páginasBossypants Autobiography and Womens SelvesCamila Paz GutiérrezAinda não há avaliações
- 2022 Tony Elumelu EntrepreneursDocumento10 páginas2022 Tony Elumelu EntrepreneursOladosu EmmanuelAinda não há avaliações
- (Isaac Asimov) How Did We Find Out About AntarcticDocumento24 páginas(Isaac Asimov) How Did We Find Out About AntarcticDrBabu PSAinda não há avaliações
- 1 PBDocumento7 páginas1 PBIndah Purnama TaraAinda não há avaliações
- LEMBAR JAWABAN CH.10 (Capital Budgeting Techniques)Documento4 páginasLEMBAR JAWABAN CH.10 (Capital Budgeting Techniques)Cindy PAinda não há avaliações
- 160kW SOFT STARTER - TAP HOLE 1Documento20 páginas160kW SOFT STARTER - TAP HOLE 1Ankit Uttam0% (1)
- The Reason: B. FlowsDocumento4 páginasThe Reason: B. FlowsAryanti UrsullahAinda não há avaliações
- Java Complete Collection FrameworkDocumento28 páginasJava Complete Collection FrameworkkhushivanshAinda não há avaliações
- Jpedal ManualDocumento20 páginasJpedal ManualDamián DávilaAinda não há avaliações
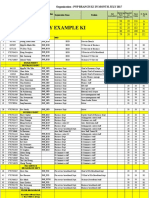
- PNP Ki in July-2017 AdminDocumento21 páginasPNP Ki in July-2017 AdminSina NeouAinda não há avaliações
- Riqas Ri RQ9142 11aDocumento6 páginasRiqas Ri RQ9142 11aGrescia Ramos VegaAinda não há avaliações
- CLA Brochure - 2022-3Documento10 páginasCLA Brochure - 2022-3Streamer AccountAinda não há avaliações
- Cultural Sensitivity BPIDocumento25 páginasCultural Sensitivity BPIEmmel Solaiman AkmadAinda não há avaliações
- B. Pengenalan Kepada Pengawal Mikro 1. Mengenali Sistem Yang Berasaskan Pengawal MikroDocumento4 páginasB. Pengenalan Kepada Pengawal Mikro 1. Mengenali Sistem Yang Berasaskan Pengawal MikroSyamsul IsmailAinda não há avaliações