Você também pode gostar
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Dokumen - Pub - Bobs Refunding Ebook v3 PDFDocumento65 páginasDokumen - Pub - Bobs Refunding Ebook v3 PDFJohn the First100% (3)
- How To Identify MQ Client Connections and Stop ThemDocumento26 páginasHow To Identify MQ Client Connections and Stop ThemPurushotham100% (1)
- ISO 9001 2015 AwarenessDocumento23 páginasISO 9001 2015 AwarenessSeni Oke0% (1)
- IEC ShipsDocumento6 páginasIEC ShipsdimitaringAinda não há avaliações
- Career Level Diagram - V5Documento1 páginaCareer Level Diagram - V5Shivani RaikwarAinda não há avaliações
- Service Manual: SV01-NHX40AX03-01E NHX4000 MSX-853 Axis Adjustment Procedure of Z-Axis Zero Return PositionDocumento5 páginasService Manual: SV01-NHX40AX03-01E NHX4000 MSX-853 Axis Adjustment Procedure of Z-Axis Zero Return Positionmahdi elmay100% (3)
- Plaza 66 Tower 2 Structural Design ChallengesDocumento13 páginasPlaza 66 Tower 2 Structural Design ChallengessrvshAinda não há avaliações
- Functional DesignDocumento17 páginasFunctional DesignRajivSharmaAinda não há avaliações
- PLC Laboratory Activity 2Documento3 páginasPLC Laboratory Activity 2Kate AlindajaoAinda não há avaliações
- Task 3 - LPDocumento21 páginasTask 3 - LPTan S YeeAinda não há avaliações
- Lithuania DalinaDocumento16 páginasLithuania DalinaStunt BackAinda não há avaliações
- (500eboard) Version Coding Model 140 As of MY 1995Documento1 página(500eboard) Version Coding Model 140 As of MY 1995Saimir SaliajAinda não há avaliações
- User S Manual AURORA 1.2K - 2.2KDocumento288 páginasUser S Manual AURORA 1.2K - 2.2KEprom ServisAinda não há avaliações
- Duavent Drug Study - CunadoDocumento3 páginasDuavent Drug Study - CunadoLexa Moreene Cu�adoAinda não há avaliações
- Review1 ScheduleDocumento3 páginasReview1 Schedulejayasuryam.ae18Ainda não há avaliações
- II 2022 06 Baena-Rojas CanoDocumento11 páginasII 2022 06 Baena-Rojas CanoSebastian GaonaAinda não há avaliações
- PED003Documento1 páginaPED003ely mae dag-umanAinda não há avaliações
- Marketing FinalDocumento15 páginasMarketing FinalveronicaAinda não há avaliações
- Pavement Design1Documento57 páginasPavement Design1Mobin AhmadAinda não há avaliações
- The Use of Air Cooled Heat Exchangers in Mechanical Seal Piping Plans - SnyderDocumento7 páginasThe Use of Air Cooled Heat Exchangers in Mechanical Seal Piping Plans - SnyderJaime Ocampo SalgadoAinda não há avaliações
- The Magic DrumDocumento185 páginasThe Magic Drumtanishgiri2012Ainda não há avaliações
- Floating Oil Skimmer Design Using Rotary Disc MethDocumento9 páginasFloating Oil Skimmer Design Using Rotary Disc MethAhmad YaniAinda não há avaliações
- Farmer Producer Companies in OdishaDocumento34 páginasFarmer Producer Companies in OdishaSuraj GantayatAinda não há avaliações
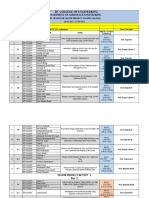
- Electives - ArchitDocumento36 páginasElectives - Architkshitiz singhAinda não há avaliações
- Chemistry Test 1Documento2 páginasChemistry Test 1shashankAinda não há avaliações
- Impact of Advertising On Consumers' Buying Behavior Through Persuasiveness, Brand Image, and Celebrity EndorsementDocumento10 páginasImpact of Advertising On Consumers' Buying Behavior Through Persuasiveness, Brand Image, and Celebrity Endorsementvikram singhAinda não há avaliações
- Mixed Up MonstersDocumento33 páginasMixed Up MonstersjaneAinda não há avaliações
- BNF Pos - StockmockDocumento14 páginasBNF Pos - StockmockSatish KumarAinda não há avaliações
- Acute Coronary SyndromeDocumento30 páginasAcute Coronary SyndromeEndar EszterAinda não há avaliações
- Activity # 1 (DRRR)Documento2 páginasActivity # 1 (DRRR)Juliana Xyrelle FutalanAinda não há avaliações