Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Power Transformer Protection Using Microcontroller-Based RelayDocumento66 páginasPower Transformer Protection Using Microcontroller-Based Relaybisanikumarbabu100% (5)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Astm A123Documento7 páginasAstm A123toto100% (1)
- Pin in PasteDocumento13 páginasPin in PasteLina Gan100% (1)
- Generator ProtectionDocumento62 páginasGenerator ProtectionMohammad Ibnul Hossain100% (5)
- Voltage Control Gyanendra Sharma Npti DelhiDocumento56 páginasVoltage Control Gyanendra Sharma Npti DelhiNPTIAinda não há avaliações
- Transformer Fault Detection Using Zigbee and GSMDocumento46 páginasTransformer Fault Detection Using Zigbee and GSMIrfan Baig100% (1)
- P 1504 GSM Based DisplayDocumento51 páginasP 1504 GSM Based DisplayDaneesh ChandrakarAinda não há avaliações
- C Objective Questions and Answers PDFDocumento19 páginasC Objective Questions and Answers PDFragamalekhyaAinda não há avaliações
- Led DisplayDocumento5 páginasLed DisplayIrfan BaigAinda não há avaliações
- Micro Controller Base Monitoring SystemDocumento6 páginasMicro Controller Base Monitoring SystemClark Darwin Masilang GozonAinda não há avaliações
- Protection of Power Transformer Using Microcontroller-Based RelayDocumento3 páginasProtection of Power Transformer Using Microcontroller-Based RelayIrfan BaigAinda não há avaliações
- Isc 2SA1694: Silicon PNP Power TransistorDocumento2 páginasIsc 2SA1694: Silicon PNP Power TransistorVictor SampaAinda não há avaliações
- 2SK2225Documento7 páginas2SK2225ROSEMARIO PORFIRIOAinda não há avaliações
- TSM360EX Solar Module: Cost Effective DesignDocumento2 páginasTSM360EX Solar Module: Cost Effective DesignIrwanAinda não há avaliações
- 3 The TTL NAND GateDocumento7 páginas3 The TTL NAND Gateanupamj4u0% (1)
- Triacs BT136 Series D Logic Level: General Description Quick Reference DataDocumento6 páginasTriacs BT136 Series D Logic Level: General Description Quick Reference DatarepelindAinda não há avaliações
- H Series An ManualDocumento5 páginasH Series An ManualraduldelAinda não há avaliações
- PLL WikipediaDocumento8 páginasPLL WikipediaMonika SharmaAinda não há avaliações
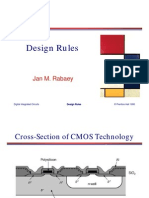
- Design Rules: Jan M. RabaeyDocumento9 páginasDesign Rules: Jan M. RabaeySaurabh ChakravartyAinda não há avaliações
- Memory Ram Gigabyte b450m d3hDocumento8 páginasMemory Ram Gigabyte b450m d3hbeivaAinda não há avaliações
- Report Infrared Solar CellDocumento22 páginasReport Infrared Solar Cellabhishek5singh5surajAinda não há avaliações
- IRG4PC50S: Features Features Features Features FeaturesDocumento8 páginasIRG4PC50S: Features Features Features Features FeaturesPerica RakićAinda não há avaliações
- Bd9483xx-E White LED Driver TV Panasonic TC42 - AS610HDocumento32 páginasBd9483xx-E White LED Driver TV Panasonic TC42 - AS610HOlmedoHurtadoAinda não há avaliações
- 8na50 N - ChannelDocumento10 páginas8na50 N - Channeladda chariAinda não há avaliações
- Battery Monitoring BasicsDocumento52 páginasBattery Monitoring BasicsKnwn StrngrAinda não há avaliações
- CH 2 - Uncontrolled Rectifiers (Autosaved)Documento92 páginasCH 2 - Uncontrolled Rectifiers (Autosaved)Gebremichael Teklay GebretsadikAinda não há avaliações
- Ect201 Solid State Devices L-T-P: 3-1-0 SyllabusDocumento1 páginaEct201 Solid State Devices L-T-P: 3-1-0 SyllabusDr. Rakesh SAinda não há avaliações
- Philadelphia University Student Name: Faculty of Engineering Student NumberDocumento2 páginasPhiladelphia University Student Name: Faculty of Engineering Student NumberSaif UddinAinda não há avaliações
- Aion Ares Echoplex Preamp DocumentationDocumento6 páginasAion Ares Echoplex Preamp Documentationmmartin046Ainda não há avaliações
- 164778Documento91 páginas164778Thanhha NguyenAinda não há avaliações
- Discrete Output Relay Module: Specification SheetDocumento2 páginasDiscrete Output Relay Module: Specification SheetdocrafiAinda não há avaliações
- AntennaDocumento4 páginasAntennaKA KAAinda não há avaliações
- VLSIDocumento26 páginasVLSIRamesh LakshmananAinda não há avaliações
- Assignment 2 NTKDocumento2 páginasAssignment 2 NTKtsegay100% (1)
- Vernier Delay Line 1Documento8 páginasVernier Delay Line 1Shibnath BhattacharjeeAinda não há avaliações
- DatasheetDocumento11 páginasDatasheetjackAinda não há avaliações
- Roll No 20 Sunil Jadhav (PPT On Ultracapacitor)Documento15 páginasRoll No 20 Sunil Jadhav (PPT On Ultracapacitor)Sunil Gautam JadhavAinda não há avaliações