Você também pode gostar
- Isc - Analisis y Diseño de Algoritmos - 2014-1Documento2 páginasIsc - Analisis y Diseño de Algoritmos - 2014-1Juan JoseAinda não há avaliações
- Diagrama de Momento Flector y de Fuerza CortanteDocumento14 páginasDiagrama de Momento Flector y de Fuerza CortanteJose Llanco SantosAinda não há avaliações
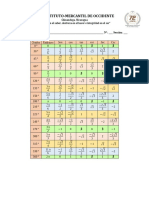
- Tabla de Valores de Ángulos Especiales - CompletaDocumento1 páginaTabla de Valores de Ángulos Especiales - CompletaCristopher Alexander Alegría RomeroAinda não há avaliações
- Lista de Problemas ElectroDocumento7 páginasLista de Problemas ElectroMiguel Angel ReyesAinda não há avaliações
- ComandosDocumento2 páginasComandosdoloreshuerta16Ainda não há avaliações
- Informe de Laboratorio Santos FloresDocumento22 páginasInforme de Laboratorio Santos FloresKevin Collantes RamirezAinda não há avaliações
- Ejercicio 4Documento3 páginasEjercicio 4ABRIL MILAGROS ROMEROAinda não há avaliações
- CUADERNILLODocumento132 páginasCUADERNILLODaniel BohorquezAinda não há avaliações
- Conversion de Unidades SecundariaDocumento11 páginasConversion de Unidades SecundariamarpazrooAinda não há avaliações
- PREC Tarea 4 Funciones Logaritmicas ExponencialesDocumento16 páginasPREC Tarea 4 Funciones Logaritmicas ExponencialesMichael50% (2)
- Informe Coagulación y FloculaciónDocumento13 páginasInforme Coagulación y FloculaciónFelipe Bautista MartínezAinda não há avaliações
- Fase 4 Algebra NavyDocumento7 páginasFase 4 Algebra NavynavyAinda não há avaliações
- Prueba Coef.2 8 Fila BDocumento5 páginasPrueba Coef.2 8 Fila BNatalia ValderramaAinda não há avaliações
- Guia de Laboratorio 4 Medidas de PosicionDocumento19 páginasGuia de Laboratorio 4 Medidas de PosicionProfe JamesAinda não há avaliações
- Sistema DiedricoDocumento16 páginasSistema DiedricoPedro B.Ainda não há avaliações
- Estadistica TallerDocumento3 páginasEstadistica TallerEliana SoraAinda não há avaliações
- Gestion de RiesgosDocumento3 páginasGestion de RiesgosLuifer CastillaAinda não há avaliações
- Clasificación y Propiedades de Los Polígonos para Segundo Grado de SecundariaDocumento3 páginasClasificación y Propiedades de Los Polígonos para Segundo Grado de Secundariajulio sanchez camones100% (1)
- Taller 5 MecanicaDocumento4 páginasTaller 5 MecanicaDanielOrtizAinda não há avaliações
- Clase 4. Criterios de Clasificacion Del Movimiento de Los Fluidos PDFDocumento21 páginasClase 4. Criterios de Clasificacion Del Movimiento de Los Fluidos PDFLuis Briones RAinda não há avaliações
- Aritmeticaa 02Documento4 páginasAritmeticaa 02MateMáticoAinda não há avaliações
- PolinomiosDocumento9 páginasPolinomiosMartina OppligerAinda não há avaliações
- Buscarv (Boleta de Pago)Documento11 páginasBuscarv (Boleta de Pago)Diego Mendez AyalaAinda não há avaliações
- Matemática Inicial - IUT DeltaDocumento10 páginasMatemática Inicial - IUT DeltaJean Carlos RivasAinda não há avaliações
- Congruencia y Teorema de AngulosDocumento3 páginasCongruencia y Teorema de AngulosMATEO ALEXANDRE PAREDES HERRERAAinda não há avaliações
- Practica Dirigida Unidad 4 - Prueba Kruskal WallisDocumento3 páginasPractica Dirigida Unidad 4 - Prueba Kruskal WallisAngel Inconfundible Povis OreAinda não há avaliações
- Anal Datos DudososDocumento22 páginasAnal Datos DudososOscar H Rojas CurasmaAinda não há avaliações
- Valor Del Dinero en El TiempoDocumento27 páginasValor Del Dinero en El TiempomanuelAinda não há avaliações