Você também pode gostar
- (GUNSMITHING) The .22 PistolDocumento18 páginas(GUNSMITHING) The .22 PistolMago Invisivel88% (25)
- Cost BreakdownDocumento241 páginasCost Breakdownbilisuma sebokaAinda não há avaliações
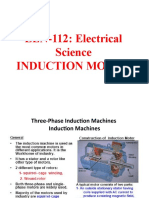
- Induction MotorDocumento53 páginasInduction MotoramaliakarinaAinda não há avaliações
- A New System of Alternating Current Motors and TransformersNo EverandA New System of Alternating Current Motors and TransformersNota: 1 de 5 estrelas1/5 (1)
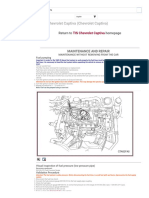
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Documento57 páginasChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)
- A New System of Alternating Current Motors and Transformers and Other EssaysNo EverandA New System of Alternating Current Motors and Transformers and Other EssaysNota: 5 de 5 estrelas5/5 (1)
- Induction MachinesDocumento81 páginasInduction MachinesSandeep SoniAinda não há avaliações
- Din en 14080-2005Documento36 páginasDin en 14080-2005Debreteni Florin100% (2)
- Installation and Commissioning of Induction MotorsDocumento145 páginasInstallation and Commissioning of Induction MotorsYuvraj Gogoi100% (1)
- Apollo Experience Report Electronic Systems Test Program Accomplishments and ResultsDocumento70 páginasApollo Experience Report Electronic Systems Test Program Accomplishments and ResultsBob AndrepontAinda não há avaliações
- Check ListDocumento6 páginasCheck ListosersAinda não há avaliações
- Induction Motor Modeling - Steady StateDocumento43 páginasInduction Motor Modeling - Steady Statedivinelight100% (3)
- Building Applications in C# - InTLDocumento682 páginasBuilding Applications in C# - InTLMustehsan Armaghan Ghouri Magkacgck100% (1)
- AC Motors: AC Motors Convert AC Electrical Energy To Mechanical EnergyDocumento106 páginasAC Motors: AC Motors Convert AC Electrical Energy To Mechanical Energybhuvana71Ainda não há avaliações
- CH 5 6 7Documento54 páginasCH 5 6 7Usman0% (1)
- Ee 212 Ac Induction MotorsDocumento9 páginasEe 212 Ac Induction MotorsabigabacAinda não há avaliações
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyDocumento13 páginasIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimAinda não há avaliações
- Induction MachinesDocumento82 páginasInduction Machinesanon_386990813Ainda não há avaliações
- Chapter 5 - AC Machine - Part2Documento48 páginasChapter 5 - AC Machine - Part2Mahesh PushpakumaraAinda não há avaliações
- Induction Motors PDFDocumento108 páginasInduction Motors PDFKshitij ShrivastavaAinda não há avaliações
- Asynchronous MachinesDocumento34 páginasAsynchronous MachinesAndi FalihAinda não há avaliações
- Induction Motor: Chapter # 01Documento22 páginasInduction Motor: Chapter # 01smartengrzAinda não há avaliações
- Induction MotorDocumento114 páginasInduction MotorNesarkiran BagadeAinda não há avaliações
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocumento25 páginasAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958Ainda não há avaliações
- Hase Nduction Achines: Aculty of Ngineering NvironmentDocumento10 páginasHase Nduction Achines: Aculty of Ngineering NvironmentMonika VaitulionytėAinda não há avaliações
- Ind MDocumento10 páginasInd MJOHN MINKHANTAinda não há avaliações
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocumento15 páginasInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminAinda não há avaliações
- Induction Machine-2020Documento95 páginasInduction Machine-2020Bharat SinghAinda não há avaliações
- Group 1 - Induction MotorsDocumento10 páginasGroup 1 - Induction MotorsRashen DilAinda não há avaliações
- InductionMotors Gate Material PartBDocumento38 páginasInductionMotors Gate Material PartBpraveen6494Ainda não há avaliações
- Induction MotorDocumento74 páginasInduction Motormera nam chinAinda não há avaliações
- Induction MachinesDocumento81 páginasInduction MachinesDeepak JhaAinda não há avaliações
- Unit1 Three Phase Induction MotorDocumento36 páginasUnit1 Three Phase Induction MotorPalak JioAinda não há avaliações
- Basic Induction Motors ConceptDocumento16 páginasBasic Induction Motors ConceptSumaira SaifAinda não há avaliações
- Basic Induction Motors ConceptDocumento16 páginasBasic Induction Motors ConceptSumaira SaifAinda não há avaliações
- Torque Equation of A DC MachineDocumento3 páginasTorque Equation of A DC MachineAnonymous MAit3mlYmAinda não há avaliações
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesDocumento63 páginasElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeAinda não há avaliações
- Electromechanical Systems: Asinchronous (Induction) MachinesDocumento35 páginasElectromechanical Systems: Asinchronous (Induction) MachineseeeifetasAinda não há avaliações
- Applied Directly To The Stator WindingsDocumento62 páginasApplied Directly To The Stator WindingsZekarias tenawAinda não há avaliações
- Applied Directly To The Stator WindingsDocumento62 páginasApplied Directly To The Stator WindingsZekarias tenawAinda não há avaliações
- Ch6-Induction MachineDocumento84 páginasCh6-Induction MachineVeli GörgülüAinda não há avaliações
- Induction MotorDocumento10 páginasInduction Motoreng_mhassan1Ainda não há avaliações
- Module 4 3Documento24 páginasModule 4 3Atharva KhadseAinda não há avaliações
- AC MachinesDocumento22 páginasAC MachinesUtkarsh ShuklaAinda não há avaliações
- CHAPTER 8 Induction MotorDocumento3 páginasCHAPTER 8 Induction MotorDhanashree ParanjapeAinda não há avaliações
- Determining Rotor Leakage ReactanceDocumento5 páginasDetermining Rotor Leakage ReactanceGaspar RodríguezAinda não há avaliações
- 3 Phase Slip Ring Inductionmotor LoadtestDocumento9 páginas3 Phase Slip Ring Inductionmotor LoadtestBhatia AdvancedAinda não há avaliações
- Induction MachineDocumento48 páginasInduction MachinechethanAinda não há avaliações
- Unit-4 Induction MotorsDocumento26 páginasUnit-4 Induction MotorsAnurag Singhal0% (1)
- Induction MachinesDocumento81 páginasInduction MachinesaswardiAinda não há avaliações
- Chapter 7-Induction Motors Part1 PDFDocumento18 páginasChapter 7-Induction Motors Part1 PDFMohammadrezaÖztürkAinda não há avaliações
- 2-EM Section 2 AC MotorDocumento107 páginas2-EM Section 2 AC Motormhafidz49Ainda não há avaliações
- DC MotorsDocumento8 páginasDC MotorsgireeshAinda não há avaliações
- ECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesDocumento7 páginasECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesHüseyin Murat PolaterAinda não há avaliações
- Chapter 3 SlideDocumento80 páginasChapter 3 Slidehaftomhaf0103Ainda não há avaliações
- Transfer Function of Synchros & Its Construction, Working - Electrical Engineering InfoDocumento6 páginasTransfer Function of Synchros & Its Construction, Working - Electrical Engineering InfoDINESHKUMAR SAinda não há avaliações
- Doubly Fed Induction Generator For Wind TurbinesDocumento21 páginasDoubly Fed Induction Generator For Wind TurbinesAdarsh KailashAinda não há avaliações
- Polyphase Induction MotorDocumento38 páginasPolyphase Induction MotorSaad KhaliqAinda não há avaliações
- Synchronous Machine Theory and ModelingDocumento108 páginasSynchronous Machine Theory and Modelingnanavarasmdu100% (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkAinda não há avaliações
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsAinda não há avaliações
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesAinda não há avaliações
- Aero 3 - 8 Anna's SyllabusDocumento110 páginasAero 3 - 8 Anna's SyllabusShiva UAinda não há avaliações
- Pressure Switch/Reed Switch Type: SeriesDocumento4 páginasPressure Switch/Reed Switch Type: SeriesDaniel Mauro Inga SalazarAinda não há avaliações
- Demineralization Mechanism and Influence of Parameters On High Ash Indian Coal by Chemical Leaching of Acid and Alkali SolutionDocumento1 páginaDemineralization Mechanism and Influence of Parameters On High Ash Indian Coal by Chemical Leaching of Acid and Alkali SolutionSushanta Kumar BeheraAinda não há avaliações
- Activity Sheets SMAW 7.23Documento5 páginasActivity Sheets SMAW 7.23Jerome Cailo DiazAinda não há avaliações
- AMICO InstallationManual PDFDocumento60 páginasAMICO InstallationManual PDFfernandoAinda não há avaliações
- Bhanu Brose Excursion ReportDocumento6 páginasBhanu Brose Excursion ReportBhanu Pratap SinghAinda não há avaliações
- California Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsDocumento4 páginasCalifornia Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsAmyra MiaAinda não há avaliações
- Comparison of IEC IP and UL/NEMA TYPE Ratings: ControlsDocumento1 páginaComparison of IEC IP and UL/NEMA TYPE Ratings: ControlsEdwin LinAinda não há avaliações
- Robotics Engineering Minor FlowchartDocumento1 páginaRobotics Engineering Minor FlowchartkskkingAinda não há avaliações
- SG-05 Safety Guideline For Illumination at WorkplaceDocumento5 páginasSG-05 Safety Guideline For Illumination at WorkplacebsrchandruAinda não há avaliações
- Reason Key CommandsDocumento6 páginasReason Key CommandsVijay KumarAinda não há avaliações
- 115 Test Out Study GuideFeb2017Documento16 páginas115 Test Out Study GuideFeb2017Ashish MalikAinda não há avaliações
- NC100HDocumento2 páginasNC100HDouglas GilbAinda não há avaliações
- T2 Homework 2Documento3 páginasT2 Homework 2Aziz Alusta OmarAinda não há avaliações
- E-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh PathakDocumento9 páginasE-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh Pathakdharshinee1961Ainda não há avaliações
- Architecture Concerns of TST and NATO TST ToolDocumento9 páginasArchitecture Concerns of TST and NATO TST Tooldorupara718747Ainda não há avaliações
- Chip Scale Atomic Magnetometer Based On SERFDocumento4 páginasChip Scale Atomic Magnetometer Based On SERFluckystar83100% (2)
- Operating Instructions: MCA 122 Modbus TCPDocumento46 páginasOperating Instructions: MCA 122 Modbus TCPnefertiti551Ainda não há avaliações
- A Vocational Training Presentation On: "Computer Numerical Control Machine"Documento15 páginasA Vocational Training Presentation On: "Computer Numerical Control Machine"karan2015Ainda não há avaliações
- Keystone - GR SeriesDocumento16 páginasKeystone - GR SeriesMohd Khairi Mohd NorzianAinda não há avaliações
- Unit 16Documento35 páginasUnit 16api-334267616Ainda não há avaliações
- Unit-1 - Spur Gears - Lecture - 6 - Problems Spur Gear - Mahesh GaikwadDocumento13 páginasUnit-1 - Spur Gears - Lecture - 6 - Problems Spur Gear - Mahesh GaikwadNikhil JadhavAinda não há avaliações
- Babies of 2010Documento16 páginasBabies of 2010Sierra Nevada Media GroupAinda não há avaliações