Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- UPSC Social SCiencesDocumento8 páginasUPSC Social SCiencesshubhanshu kumarAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Fess 303Documento10 páginasFess 303Varun MannAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Fess304 - DoneDocumento6 páginasFess304 - Doneshubhanshu kumarAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Diversity and DiscriminationDocumento12 páginasDiversity and Discriminationkrishna krishAinda não há avaliações
- Fess 301Documento12 páginasFess 301Vinoth ManickamAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
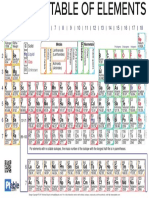
- Periodic Table PDFDocumento1 páginaPeriodic Table PDFpreetamAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Pid CNTRL of BLDCDocumento6 páginasPid CNTRL of BLDCManzar ImamAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Basic ConceptDocumento56 páginasBasic ConceptHarish KumarAinda não há avaliações
- Aircraft Electrical Systems (Pallett)Documento192 páginasAircraft Electrical Systems (Pallett)Abolfazl Mazloomi100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- DELCO Gen.Documento10 páginasDELCO Gen.HowardgfAinda não há avaliações
- Tech 201 To 300Documento4 páginasTech 201 To 300Jevan CalaqueAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Synchronous Generators NotesDocumento75 páginasSynchronous Generators NotesSaravanan T Y100% (1)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Ac & DC DriveDocumento6 páginasAc & DC DriveAlagar Tharun100% (2)
- A R. Daniels-Introduction To Electrical Machines PDFDocumento196 páginasA R. Daniels-Introduction To Electrical Machines PDFSalih Ince100% (4)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Unit - I D.C. GeneratorsDocumento78 páginasUnit - I D.C. GeneratorsCH MOHAMMAD ATTIR KHAYYAMAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Tecumseh EuropaDocumento109 páginasTecumseh EuropaArseniyeIII100% (2)
- Datasheet TachogeneratorDocumento4 páginasDatasheet TachogeneratorNurulHidayatAinda não há avaliações
- Presentation For Motor WindingsDocumento128 páginasPresentation For Motor WindingsAhmed Kordy88% (8)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- What Is A DC MotorDocumento9 páginasWhat Is A DC MotorKylaeunice GuerraAinda não há avaliações
- Experiment Three: Charging System: DynamoDocumento12 páginasExperiment Three: Charging System: Dynamoمحمد القدوميAinda não há avaliações
- NTTF Question BankDocumento57 páginasNTTF Question Bankmithunprayag100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- MODULE IN DC & AC MachineryDocumento81 páginasMODULE IN DC & AC Machinerybernard de veraAinda não há avaliações
- Limit of Temperature Rise For Air Cooled Rotating Machines PDFDocumento1 páginaLimit of Temperature Rise For Air Cooled Rotating Machines PDFLeon de RuijterAinda não há avaliações
- Kelas 1.1.5 - 1.1.6Documento29 páginasKelas 1.1.5 - 1.1.6usai_ahmadAinda não há avaliações
- Grand Assignment IDocumento3 páginasGrand Assignment ISheri Abhishek ReddyAinda não há avaliações
- Interpole DesignDocumento13 páginasInterpole DesignVijay ShinolAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Speed Control of BLDC Motor by Using PWM TechniqueDocumento7 páginasSpeed Control of BLDC Motor by Using PWM TechniquewaweeAinda não há avaliações
- HSC Physics in MonthDocumento162 páginasHSC Physics in MonthZarina100% (2)
- Site Comp End 02Documento66 páginasSite Comp End 02Parameswararao BillaAinda não há avaliações
- 11e501 Electrical Machine DesignDocumento4 páginas11e501 Electrical Machine DesignnandhakumarmeAinda não há avaliações
- Unit-2 - DC Machines PDFDocumento123 páginasUnit-2 - DC Machines PDFsujithAinda não há avaliações
- Endeavor - 20210519 - Nexperia - Understanding and Solving Thermal Design Issues in MOSFET ApplicationDocumento8 páginasEndeavor - 20210519 - Nexperia - Understanding and Solving Thermal Design Issues in MOSFET ApplicationJNarigonAinda não há avaliações
- Project On Ac Generator and DC GeneratorDocumento17 páginasProject On Ac Generator and DC GeneratorAshutosh Rastogi50% (12)
- ENSC 387 Sensors and ActuatorsDocumento117 páginasENSC 387 Sensors and ActuatorsMajed KawamAinda não há avaliações
- Speed Control of BLDC Motor Using IPM and Micro 2812 Ver.2.0Documento41 páginasSpeed Control of BLDC Motor Using IPM and Micro 2812 Ver.2.0subbanna100% (1)
- 3rd Sem 7 Marks Basic Elect MachineDocumento32 páginas3rd Sem 7 Marks Basic Elect MachineRajkumarJhapte0% (1)
- Plate Rolling Machine 2Documento22 páginasPlate Rolling Machine 2Oluwaseyi Victor Sorinade100% (1)