Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Bubble Sort and Linear SearchDocumento4 páginasBubble Sort and Linear SearchDivya KrishnanAinda não há avaliações
- HDTV T: EchnologyDocumento26 páginasHDTV T: EchnologyDivya KrishnanAinda não há avaliações
- Array 1Documento4 páginasArray 1Divya KrishnanAinda não há avaliações
- Scheme EST 102 Spet 2022Documento4 páginasScheme EST 102 Spet 2022Divya KrishnanAinda não há avaliações
- Umera Anjum - M.TechDocumento61 páginasUmera Anjum - M.TechDivya KrishnanAinda não há avaliações
- Lecture4 CS169Documento41 páginasLecture4 CS169Maryam RahimluAinda não há avaliações
- FM Transmitters CrosbyDocumento4 páginasFM Transmitters CrosbyDivya KrishnanAinda não há avaliações
- Superheterodyne Radio Receivers: AM Receiver ArchitecturesDocumento5 páginasSuperheterodyne Radio Receivers: AM Receiver ArchitecturesmythulasiAinda não há avaliações
- P Code M On: Ulse OdulatiDocumento45 páginasP Code M On: Ulse Odulatinabaa SalimAinda não há avaliações
- Iare DC PPT PDFDocumento294 páginasIare DC PPT PDFRavi TiwariAinda não há avaliações
- Satellite Communication: by Ravikiran S. Anande Assistant ProfessorDocumento35 páginasSatellite Communication: by Ravikiran S. Anande Assistant ProfessorDivya Krishnan100% (1)
- Multipal AccessDocumento3 páginasMultipal Accessचौकीदार गोपाल भार्गवAinda não há avaliações
- Colouttvfundamentals 160425132024Documento105 páginasColouttvfundamentals 160425132024Divya KrishnanAinda não há avaliações
- Introduction To TelevisionDocumento27 páginasIntroduction To TelevisionDivya KrishnanAinda não há avaliações
- Lecture1429093042 PDFDocumento28 páginasLecture1429093042 PDFPrachi MishraAinda não há avaliações
- EE401 Electronic CommunicationDocumento2 páginasEE401 Electronic CommunicationDivya KrishnanAinda não há avaliações
- CCTV System.: C.Sagevan. JF/BST/F/17/1/0019Documento28 páginasCCTV System.: C.Sagevan. JF/BST/F/17/1/0019Divya KrishnanAinda não há avaliações
- Chapter: CABLE TV: Constructional Details, Working and Radiation Pattern of Dish AntennaDocumento19 páginasChapter: CABLE TV: Constructional Details, Working and Radiation Pattern of Dish AntennaDivya KrishnanAinda não há avaliações
- Presented by HrudyaDocumento10 páginasPresented by HrudyaDivya KrishnanAinda não há avaliações
- Electronic CommunicationDocumento117 páginasElectronic CommunicationDivya KrishnanAinda não há avaliações
- Module 2 Insulators PDFDocumento82 páginasModule 2 Insulators PDFDivya KrishnanAinda não há avaliações
- EE206 Material ScienceDocumento2 páginasEE206 Material Sciencevpzfaris50% (2)
- EE309 Microprocessors and Embedded Systems-ModifiedDocumento2 páginasEE309 Microprocessors and Embedded Systems-ModifiedDivya KrishnanAinda não há avaliações
- Module 2 Insulators PDFDocumento82 páginasModule 2 Insulators PDFDivya KrishnanAinda não há avaliações
- Embedded New 1 PDFDocumento24 páginasEmbedded New 1 PDFRohit ChaurasiaAinda não há avaliações
- Embedded CDocumento17 páginasEmbedded CDivya KrishnanAinda não há avaliações
- An Application of 8085 Register Interfacing With LedDocumento13 páginasAn Application of 8085 Register Interfacing With LedDivya KrishnanAinda não há avaliações
- Oil TrafoDocumento27 páginasOil TrafoPin Santos100% (1)
- Ethics VajiramDocumento40 páginasEthics VajiramDivya KrishnanAinda não há avaliações
- EE309 MP Mod3 Ktunotes - inDocumento20 páginasEE309 MP Mod3 Ktunotes - incrsarinAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Pure Sine Wave Inverter For House BackupDocumento44 páginasPure Sine Wave Inverter For House BackupKrista Jackson100% (1)
- TDA1517Documento15 páginasTDA1517Dave ManakisAinda não há avaliações
- 2 Related Topics Automatic IrrigationDocumento13 páginas2 Related Topics Automatic IrrigationSftvsn Giovanni TandogAinda não há avaliações
- Die Casting Process & Design Gate & ParametersDocumento113 páginasDie Casting Process & Design Gate & ParametersEr Tarun Patel100% (1)
- Projeto Experimental Fatorial para Aumentar A Produção de Metano Na Digestão de Resíduos LácteosDocumento7 páginasProjeto Experimental Fatorial para Aumentar A Produção de Metano Na Digestão de Resíduos LácteosLuís Paulo CardosoAinda não há avaliações
- Technical Brochure Metal Ceilings V100-V200-en EUDocumento12 páginasTechnical Brochure Metal Ceilings V100-V200-en EUNicu PotîngAinda não há avaliações
- Operating Instructions: MCA 122 Modbus TCPDocumento46 páginasOperating Instructions: MCA 122 Modbus TCPnefertiti551Ainda não há avaliações
- EnglishDocumento6 páginasEnglishThineswary Siva naiduAinda não há avaliações
- BCM NotesDocumento25 páginasBCM NotesAman AgrawalAinda não há avaliações
- Hexadecimal To DecimalDocumento7 páginasHexadecimal To DecimalMushfik ArafatAinda não há avaliações
- CRX Seat Diassembly & Assembly 1Documento9 páginasCRX Seat Diassembly & Assembly 1ocdank19806116Ainda não há avaliações
- Dry ContactsDocumento2 páginasDry ContactsDiwakar MishraAinda não há avaliações
- Differential Calculus Assignment No.3Documento20 páginasDifferential Calculus Assignment No.3Agerico FunelasAinda não há avaliações
- Chapter 1 Introduction To Green BuildingsDocumento19 páginasChapter 1 Introduction To Green BuildingsSunil BeheraAinda não há avaliações
- Garmin Gtx327 ImDocumento55 páginasGarmin Gtx327 ImHarry NuryantoAinda não há avaliações
- IEC Systems Manual - SCRDocumento102 páginasIEC Systems Manual - SCRgabriel100% (3)
- SampleDocumento2 páginasSamplesaurabhverma08Ainda não há avaliações
- Pipe Color CodeDocumento1 páginaPipe Color CodePatricia de los SantosAinda não há avaliações
- LiftingLugStress Rev 1.5Documento17 páginasLiftingLugStress Rev 1.5mohdshakir bahariAinda não há avaliações
- Formulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film FormerDocumento11 páginasFormulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film Formersunaina agarwalAinda não há avaliações
- Chemistry, Intermediate II Year Model Question PapersDocumento3 páginasChemistry, Intermediate II Year Model Question PapersAkshay PandeyAinda não há avaliações
- Brain Controlled Car For Disabled Using Artificial IntelligenceDocumento17 páginasBrain Controlled Car For Disabled Using Artificial IntelligenceMdkhanzAinda não há avaliações
- Bhanu Brose Excursion ReportDocumento6 páginasBhanu Brose Excursion ReportBhanu Pratap SinghAinda não há avaliações
- MR ValvesDocumento56 páginasMR ValvesIdris SiddiquiAinda não há avaliações
- ACI 517-2R-87 Standard Specification For Tolerances For Accelerated Curing at Atmospheric PressureDocumento17 páginasACI 517-2R-87 Standard Specification For Tolerances For Accelerated Curing at Atmospheric PressureKiramat ShahAinda não há avaliações
- Training CoursesDocumento16 páginasTraining CoursesFeroz KhanAinda não há avaliações
- E-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh PathakDocumento9 páginasE-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh Pathakdharshinee1961Ainda não há avaliações
- Body of Knowledge PDFDocumento1 páginaBody of Knowledge PDFAda RamirezAinda não há avaliações
- WAXESDocumento2 páginasWAXESPra YogaAinda não há avaliações
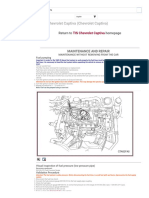
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Documento57 páginasChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)