Você também pode gostar
- Feedback Controller TuningDocumento23 páginasFeedback Controller Tuningso cool100% (1)
- Acfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnDocumento40 páginasAcfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnMOHAMED THARIKAinda não há avaliações
- Control Theory ModulesDocumento27 páginasControl Theory ModulesSushmita KujurAinda não há avaliações
- Today's EEE 101 Lecture: EEE 101 C 2002 M.C. Ramos UP EEE DepartmentDocumento19 páginasToday's EEE 101 Lecture: EEE 101 C 2002 M.C. Ramos UP EEE DepartmentJulie AlicosAinda não há avaliações
- Pid Controller: Ashok.S 500017496 M.Tech Pde R670211016Documento40 páginasPid Controller: Ashok.S 500017496 M.Tech Pde R670211016Ashik Jacob Oommen100% (1)
- Control Systems Lect. 4 PIDDocumento65 páginasControl Systems Lect. 4 PIDhmaymadAinda não há avaliações
- Pid TuningDocumento19 páginasPid TuningAsuh Rifqi Prihandana100% (1)
- (LCT-0001) EEE 101 IntroductionDocumento4 páginas(LCT-0001) EEE 101 IntroductionAnonymous EnggrUsmAinda não há avaliações
- Controller Tuning Methods for Process ControlDocumento17 páginasController Tuning Methods for Process ControltrshaaaAinda não há avaliações
- CHE3162 Lecture 8: Introduction to Feedback Control LoopsDocumento33 páginasCHE3162 Lecture 8: Introduction to Feedback Control LoopsPhan NeeAinda não há avaliações
- PID ControllerDocumento44 páginasPID ControllerDeepthiAinda não há avaliações
- Control Theory ModulesDocumento53 páginasControl Theory ModulesSushmita KujurAinda não há avaliações
- Lecture9 IMCDocumento17 páginasLecture9 IMCAudrey Patrick KallaAinda não há avaliações
- Open loop PID tuning for 1st order systemsDocumento18 páginasOpen loop PID tuning for 1st order systemskarmoweldingAinda não há avaliações
- Report ControlDocumento33 páginasReport Controlajwadalfatani100% (5)
- An Introduction To Control and Digital Control Ideas: Control Problem Choosing The Input ChangingDocumento15 páginasAn Introduction To Control and Digital Control Ideas: Control Problem Choosing The Input Changing02218177Ainda não há avaliações
- L-13 (SS) (Ia&c) ( (Ee) Nptel)Documento8 páginasL-13 (SS) (Ia&c) ( (Ee) Nptel)Darkmatter DarkmatterrAinda não há avaliações
- Control EngineeringDocumento137 páginasControl EngineeringDuc-Duy Pham NguyenAinda não há avaliações
- Objectives: - Discuss Final Project Deliverables - ControlDocumento25 páginasObjectives: - Discuss Final Project Deliverables - ControlPOONAAinda não há avaliações
- PID Control System Analysis and DesignDocumento48 páginasPID Control System Analysis and DesignAsghar AliAinda não há avaliações
- Lecture 1 ADocumento294 páginasLecture 1 AZakariya Mohamed100% (1)
- Introduction To Control Systems SE302 Topic 1 - Introduction To Linear SystemsDocumento37 páginasIntroduction To Control Systems SE302 Topic 1 - Introduction To Linear Systemsvimalaspl7831Ainda não há avaliações
- Feedback Control Systems: Introduction (Examples)Documento19 páginasFeedback Control Systems: Introduction (Examples)Sherullah KhanAinda não há avaliações
- SKEE 3133 Chapter 1 RevisedDocumento56 páginasSKEE 3133 Chapter 1 RevisedMuhammad Zul HilmieAinda não há avaliações
- CoE Unit1 Ch1 (Introduction)Documento25 páginasCoE Unit1 Ch1 (Introduction)All_regAinda não há avaliações
- Plett DawsonDocumento270 páginasPlett DawsonRaghu0% (1)
- Model Reference Adaptive ControlDocumento57 páginasModel Reference Adaptive ControlmervebayrakAinda não há avaliações
- Lecture 1 & 2 - 2Documento37 páginasLecture 1 & 2 - 2Awais0040% (1)
- Modern Control System EKT 308 OverviewDocumento30 páginasModern Control System EKT 308 OverviewSolehah Md HashimAinda não há avaliações
- Final Project Deliverables and HVAC Control SequenceDocumento25 páginasFinal Project Deliverables and HVAC Control Sequenceamechmar5935Ainda não há avaliações
- Objectives: - Discuss Final Project Deliverables - ControlDocumento25 páginasObjectives: - Discuss Final Project Deliverables - ControlsardarmkhanAinda não há avaliações
- Processes With Deadtime, Internal Model ControlDocumento19 páginasProcesses With Deadtime, Internal Model ControlChristianaPrasetyaAinda não há avaliações
- Process Reaction CurveDocumento6 páginasProcess Reaction Curveindra100% (1)
- Matlab Exp 7Documento9 páginasMatlab Exp 7Mohd RehanAinda não há avaliações
- MPC ConceptsDocumento26 páginasMPC Conceptsabdul_moiz_26Ainda não há avaliações
- 1-Introduction To Process ControlDocumento30 páginas1-Introduction To Process ControlRazif Metta100% (4)
- EE402 RecitationDocumento64 páginasEE402 Recitationvignesh0617Ainda não há avaliações
- Process Dynamic ModellingDocumento30 páginasProcess Dynamic ModellingthenmolhiAinda não há avaliações
- Week1a ControlDocumento73 páginasWeek1a ControlRizwanAinda não há avaliações
- Topic 1.0 Design of Feedback Control Systems TCE5102Documento30 páginasTopic 1.0 Design of Feedback Control Systems TCE5102Courage ChigerweAinda não há avaliações
- Probably The Best Simple PID Tuning Rules in The World: Sigurd SkogestadDocumento28 páginasProbably The Best Simple PID Tuning Rules in The World: Sigurd SkogestadMohamed RezkAinda não há avaliações
- PID Controller: Control: The Proportional, The Integral and Derivative Values, Denoted PDocumento16 páginasPID Controller: Control: The Proportional, The Integral and Derivative Values, Denoted PshaheerdurraniAinda não há avaliações
- Pid Tuning ClassicalDocumento18 páginasPid Tuning ClassicalVo Quang HuyAinda não há avaliações
- Unesco - Eolss Sample Chapters: Controller Design in Time-DomainDocumento9 páginasUnesco - Eolss Sample Chapters: Controller Design in Time-DomainAnonymous EPSHB9tXZAinda não há avaliações
- Unit-3 PDCDocumento59 páginasUnit-3 PDCNirmal Kumar PandeyAinda não há avaliações
- 1 Introduction To Control SystemsDocumento17 páginas1 Introduction To Control SystemsMuhammad Farhan100% (1)
- PID Tuning Classical Methods GuideDocumento10 páginasPID Tuning Classical Methods GuideTolga DurudoganAinda não há avaliações
- Process Control PreliminariesDocumento25 páginasProcess Control PreliminariesJeremy ColemanAinda não há avaliações
- 1 Introduction To Control SystemsDocumento47 páginas1 Introduction To Control Systemsokay45486Ainda não há avaliações
- Experiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETDocumento18 páginasExperiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETMd Abid AfridiAinda não há avaliações
- Electronic Instrumentation & Control SystemsDocumento76 páginasElectronic Instrumentation & Control SystemsshahnawazuddinAinda não há avaliações
- Eee 326 Lecture Notes 1Documento38 páginasEee 326 Lecture Notes 1Barış DuranAinda não há avaliações
- Chapter1 Has BeenDocumento11 páginasChapter1 Has BeenOlanrewaju EmmanuelAinda não há avaliações
- COMP417 Introduction to Robotics and Intelligent Systems Feedback ControlDocumento50 páginasCOMP417 Introduction to Robotics and Intelligent Systems Feedback ControlHaozhi LiAinda não há avaliações
- Tuning Fuzzy PIDDocumento22 páginasTuning Fuzzy PIDGoegoes Dwi NAinda não há avaliações
- Control of DC Motor Using Different Control StrategiesNo EverandControl of DC Motor Using Different Control StrategiesAinda não há avaliações
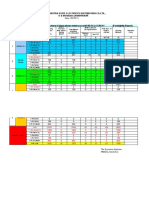
- Maharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARDocumento3 páginasMaharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARPuru BornareAinda não há avaliações
- Jobs For Software Testers in Siemens Teamcenter Software Through Industry Experience ProgramDocumento4 páginasJobs For Software Testers in Siemens Teamcenter Software Through Industry Experience ProgramKumar SAinda não há avaliações
- Types of Wind Turbines - Horizontal Axis and Vertical Axis ComparedDocumento1 páginaTypes of Wind Turbines - Horizontal Axis and Vertical Axis Comparedmendhi123Ainda não há avaliações
- Camden CM-30EE-LED Data SheetDocumento2 páginasCamden CM-30EE-LED Data SheetJMAC SupplyAinda não há avaliações
- Sensor Performance Characteristics DefinitionsDocumento12 páginasSensor Performance Characteristics DefinitionsKhairul FahzanAinda não há avaliações
- Top Issues List - V2Documento110 páginasTop Issues List - V2Lam HoangAinda não há avaliações
- Form-HSE-TMR-006 Compressor, Genzet, Water Jet InspectionDocumento2 páginasForm-HSE-TMR-006 Compressor, Genzet, Water Jet Inspectionkenia infoAinda não há avaliações
- PGCB ReportDocumento36 páginasPGCB ReportNayemul Hasan NayemAinda não há avaliações
- An Introduction To Marketing Research by SmithDocumento448 páginasAn Introduction To Marketing Research by SmithKali Das100% (1)
- Ficha Tecnica Viking PDFDocumento11 páginasFicha Tecnica Viking PDFRichie ChicolAinda não há avaliações
- SUMMER TRAINING REPORT AT Elin Electronics Ltd. Gzb.Documento54 páginasSUMMER TRAINING REPORT AT Elin Electronics Ltd. Gzb.Ravi Kumar100% (3)
- Ztree 2 StataDocumento3 páginasZtree 2 StataDaniel Felipe ParraAinda não há avaliações
- Experiment 1 Phy 360Documento14 páginasExperiment 1 Phy 360Mohd Khairul0% (2)
- A Comprehensive Study of The Howland Current Pump Snoa474a PDFDocumento17 páginasA Comprehensive Study of The Howland Current Pump Snoa474a PDFnapoleon_velasc3617Ainda não há avaliações
- Enterprise, Innovation Creativity 2018-19 S3 CourseworkDocumento7 páginasEnterprise, Innovation Creativity 2018-19 S3 CourseworkSajidAinda não há avaliações
- Food Safety ChecklistDocumento5 páginasFood Safety ChecklistDenver Palingit Rimas100% (3)
- Nano Particle Characterization MethodsDocumento32 páginasNano Particle Characterization MethodsVignesh Raja PAinda não há avaliações
- Prac Lesson Plan Primary MathematicsDocumento9 páginasPrac Lesson Plan Primary Mathematicsapi-293527475Ainda não há avaliações
- Carrier LDU ManualDocumento123 páginasCarrier LDU Manualdafrie rimbaAinda não há avaliações
- Sni+03 6868 2002Documento3 páginasSni+03 6868 2002abanghasanAinda não há avaliações
- Evaluating SWOT's Value in Creating Actionable, Strategic IntelligenceDocumento94 páginasEvaluating SWOT's Value in Creating Actionable, Strategic IntelligenceMJFinnegan4100% (4)
- Linear Loaded Vert 80-40Documento14 páginasLinear Loaded Vert 80-40Claudio ChiconAinda não há avaliações
- Ladybug5 DatasheetDocumento2 páginasLadybug5 DatasheetEloy Ricardo Franco FigueiraAinda não há avaliações
- CV for Mechanical Inspector and Welding InspectorDocumento28 páginasCV for Mechanical Inspector and Welding InspectorAJMAL KAREEMAinda não há avaliações
- Sl1000 MLT User Guide v1 Key TelephoneDocumento24 páginasSl1000 MLT User Guide v1 Key TelephoneRavi Sudharsan0% (1)
- Icest 2013 02 PDFDocumento424 páginasIcest 2013 02 PDFphanduy1310Ainda não há avaliações
- StradaDocumento4 páginasStradayzk14Ainda não há avaliações
- ICMT Valve With ICAD Motor Control Using A Pressure Input SignalDocumento2 páginasICMT Valve With ICAD Motor Control Using A Pressure Input SignalvickersAinda não há avaliações
- Дизельные электростанции PramacDocumento124 páginasДизельные электростанции PramacBrizmotorsAinda não há avaliações
- Rajib Mall Lecture NotesDocumento97 páginasRajib Mall Lecture NotesAnuj Nagpal100% (1)