Escolar Documentos
Profissional Documentos
Cultura Documentos
Monog 10 2 Globo de Leds
Enviado por
wylltonmTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Monog 10 2 Globo de Leds
Enviado por
wylltonmDireitos autorais:
Formatos disponíveis
UNIVERSIDADE TECNOLGICA FEDERAL DO PARAN DEPARTAMENTO ACADMICO DE ELETRNICA CURSO DE ENGENHARIA DA COMPUTAO
CLAUDIO AKIO NAMIKATA EDUARDO DOMANSKI DOS SANTOS RICARDO MARTINS OLIVEIRA FARAH SULEIMAN AUGUSTO PAVO MAHMOUD
GLOBO DE LEDS
TRABALHO ACADMICO
CURITIBA 2010
CLAUDIO AKIO NAMIKATA EDUARDO DOMANSKI DOS SANTOS RICARDO MARTINS OLIVEIRA FARAH SULEIMAN AUGUSTO PAVO MAHMOUD
GLOBO DE LEDS
Trabalho Acadmico apresentado Unidade Curricular de Oficina de
Integrao II do Curso de Engenharia da Computao da Universidade
Tecnolgica Federal do Paran como requisito parcial para aprovao.
Orientador: Prof. Dr. Hugo Vieira Neto
CURITIBA 2010
RESUMO
NAMIKATA, Cludio Akio; SANTOS, Eduardo Domanski dos; FARAH, Ricardo Martins Oliveira; MAHMOUD, Suleiman Augusto Pavo. Globo de LEDS. 2010. Universidade Tecnolgica Federal do Paran Curitiba, Paran.
Este projeto um trabalho de carter interdisciplinar que tem como objetivo o desenvolvimento e documentao de um sistema mecnicoeletrnico integrado com um software que possibilite a reproduo de imagens em um globo de LEDs. Consiste em duas partes principais: a etapa mecnica e a etapa eletrnica. A primeira fornecer a estrutura fsica necessria para que, em conjunto com a segunda, possibilite a demonstrao do fenmeno phi e da persistncia da viso.
Palavras-chave:
Globo,
LEDs,
Microcontrolador,
Mecnico,
Eletrnico,
Persistncia da Viso, Fenmeno Phi.
ABSTRACT
NAMIKATA, Cludio Akio; SANTOS, Eduardo Domanski dos; FARAH, Ricardo Martins Oliveira; MAHMOUD, Suleiman Augusto Pavo. Globo de LEDS. 2010. Universidade Tecnolgica Federal do Paran Curitiba, Paran.
This project is an interdisciplinary study that aims to develop and document an integrated electro-mechanical system with software that enables reproduction of images in a LED POV globe. It consists of two main parts: mechanics and electronics. The first one will provide the physical infrastructure necessary so that, together with the second, allows the demonstration of the persistence of vision and the phi phenomenon.
Keywords: Globe, LEDs, Microcontroller, Mechanical, Electronic, Persistence of Vision, Phenomenon Phi.
LISTA DE SIGLAS
ASCII CPU EEPROM HZ JPEG MCU MIPS LCD LED PDV PLL RAM RISC RPM SPI
American Standard Code for Information Interchange Central Processing Unit Electrically-Erasable Programmable Read-Only Memory Hertz Joint Photographic Experts Group Microcontroller Unit Milhes de Instrues Por Segundo Liquid Crystal Display Light Emitting Diode Persistncia Da Viso Phase Lock Loop Random Access Memory Reduced Instruction Set Computer Rotaes Por Minuto Serial Peripheral Interface
LISTA DE FIGURAS Figura 1 - Eixo principal. ................................................................................... 15 Figura 2 - Prottipo do aparato......................................................................... 17 Figura 3 - Diagrama esquemtico do transformador e pontes retificadoras usadas. ............................................................................................................. 18 Figura 4 - Sensor de sincronismo: Emissor e Receptor Infravermelho. ........... 19 Figura 5 Circuito do projeto utilizando o PIC 18F4620. ................................. 22 Figura 6 - ICD2. ................................................................................................ 24 Figura 7 Assistente de configurao do PIC fornecido pelo CCS. ................ 26 Figura 8 - Image to ASCII Converter 1.1. ......................................................... 29 Figura 9 - Resultado da converso da imagem JPEG para a matriz binria. ... 31 Figura 10 - Estrutura do algoritmo .................................................................... 32
SUMRIO
1 INTRODUO ............................................................................................... 8 1.1 MOTIVAO ............................................................................................... 9 1.2 JUSTIFICATIVA ........................................................................................... 9 1.3 OBJETIVOS ............................................................................................... 10
1.3.1 1.3.2 Objetivo Geral ................................................................................................ 10 Objetivos Especficos ..................................................................................... 10
2 REVISO BIBLIOGRFICA........................................................................ 11 2.1.PERSISTNCIA DA VISO ....................................................................... 11 2.2.FENMENO PHI ....................................................................................... 12 2.3 LED ............................................................................................................ 12 3 METODOLOGIA .......................................................................................... 14 3.1 PROJETO MECNICO .............................................................................. 14
3.1.1 3.1.2 3.1.3 3.1.4 3.1.5 Anel de Rotao ............................................................................................. 14 Preparao Mecnica para Alimentao ....................................................... 15 Rolamentos .................................................................................................... 16 Motor .............................................................................................................. 16 Prottipo ......................................................................................................... 16
3.2 PROJETO ELETRNICO .......................................................................... 17
3.2.1 Hardware ........................................................................................................ 17
3.2.1.1 Transformador e Diagrama Esquemtico da Fonte de Alimentao ............. 17 3.2.1.2 Sensor tico de sincronizao ....................................................................... 19 3.2.1.3 Microcontrolador............................................................................................. 19 3.2.1.4 Desenvolvimento ............................................................................................ 22 3.2.2 Software ......................................................................................................... 24
3.2.2.1 Programao do PIC 18F............................................................................... 25 3.2.2.2 Caractersticas da Programao do Software ................................................ 27 3.2.2.3 Algoritmo ........................................................................................................ 28
3.2.3
Problemas Encontrados ................................................................................. 32
3.2.3.1 Gerais ............................................................................................................. 32 3.2.3.2 Estrutura Mecnica ........................................................................................ 32 3.2.3.3 Hardware ........................................................................................................ 33 3.2.3.4 Integrao ...................................................................................................... 33 3.2.3.5 Software ......................................................................................................... 34
4 TRABALHOS FUTUROS ............................................................................ 35 5 CONCLUSO .............................................................................................. 36 REFERNCIAS................................................................................................ 37
1 INTRODUO
Como constata Saba e Epiphanio (2001), o olho humano um sensor poderosssimo, que em conjunto com o crebro, capta imagens que desvendam o mundo exterior com todas as suas formas, relevos, cores e movimentos. Para Pedrosa (2009), o olho humano est no cimo da linha de desenvolvimento da sensibilidade das espcies diante dos fenmenos luminosos e representa o mais elevado grau de aperfeioamento da matria no que tange captao das manifestaes da energia luminosa. Na literatura comum se encontrar a comparao do olho humano com uma mquina fotogrfica, devido ao sistema de lentes presente em ambos. Entretanto, fisiologicamente, o olho tem uma capacidade
surpreendente quanto fotossensibilidade, no podendo ser comparado a uma simples mquina fotogrfica. O estudo fisiolgico da ptica permite revelar particularidades do olho dito normal, como exemplo a persistncia das imagens na retina. Baseado nessas particularidades e possuindo um breve conhecimento sobre alguns assuntos estudados durante as disciplinas j cursadas pelos integrantes do grupo, foi possvel desenvolver um globo de diodos emissores de luz que formam imagens de acordo com uma pr-programao feita pelo usurio. Neste documento sero mostrados os passos utilizados para a confeco do globo, sua programao, as dificuldades encontradas e ainda uma reviso sobre assuntos relevantes ao projeto.
1.1
MOTIVAO
A curiosidade e o desafio de realizar a construo do aparato eletromecnico partindo de vdeos da internet a motivao para este trabalho. importante comentar, tambm, sobre a facilidade devida ao fato de um dos integrantes da equipe ter domnio sobre a utilizao de
microcontroladores. Facilidade esta que foi prevista desde o incio do projeto e somou-se como motivao para sua realizao.
1.2
JUSTIFICATIVA
Definida pela sua ementa, a disciplina de Oficina de Integrao II do curso de Engenharia de Computao ofertado pela UTFPR tem por objetivo a integrao dos conhecimentos de disciplinas de formao bsica e profissionalizante obtidos at o momento:
Integrao dos conhecimentos de disciplinas de formao bsica e profissionalizante obtidos at o momento. Aplicao dos conceitos de metodologia cientfica para o desenvolvimento, em equipes, de um sistema computacional (software e/ou hardware) contemplando essa integrao. Aplicao dos conceitos de metodologia cientfica e comunicao e expresso para a elaborao e apresentao oral de relatrio final dos resultados do projeto desenvolvido. (BRASIL, 2010).
Assim, uma das justificativas para o projeto o atendimento ao que consta na ementa da disciplina de Oficina de Integrao II, pois atravs de seu desenvolvimento conhecimentos sobre fisiologia, fsica, eletrnica, mecnica e programao sero abordados e integrados. Cabe ainda dizer que sendo a disciplina ministrada por professores da rea de eletrnica e fsica, procurou-se um projeto que trabalhasse com um tema nessas reas para tornar o acesso orientao mais rpida, prtica e frequente.
10
1.3
OBJETIVOS
1.3.1 Objetivo Geral
Construir um globo de LEDs que gere imagens de acordo com uma pr-programao feita pelo usurio. Seu funcionamento ser com base na teoria da persistncia da viso e do fenmeno phi.
1.3.2 Objetivos Especficos
Construir um projeto mecnico como estrutura para o globo de LEDs; Construir um projeto eletrnico para controlar o funcionamento dos LEDs; Desenvolver um software para MCU PIC capaz de reproduzir uma imagem qualquer no globo de LEDs; Integrar os projetos mecnico, eletrnico e o software.
11
2 REVISO BIBLIOGRFICA Como explica Guyton, a retina a parte fotossensvel do olho. na retina que esto as clulas responsveis pela formao das cores e pela viso em ambientes pouco iluminados.
A retina a parte fotossensvel do olho. Nela esto contidos os cones, que so responsveis pela viso a cores, e os bastonetes, que so, principalmente responsveis pela viso no escuro. Quando os cones e bastonetes so excitados, os sinais so transmitidos atravs de neurnios sucessivos, localizados na prpria retina, chegando, finalmente s fibras do nervo ptico e ao crtex cerebral. (Guyton, 1988).
2.1.
PERSISTNCIA DA VISO
A persistncia da imagem, tambm conhecida como persistncia da retina, ou ainda reteno retinal, uma propriedade do olho humano de reter na retina a imagem captada durante um pequeno intervalo de tempo. Essa propriedade percebida quando o olho exposto a uma fonte luminosa e em seguida exposto total escurido, pois a luz que penetra a retina gravada e leva algum tempo para se desfazer (OLIVEIRA, 2009). Essa persistncia da imagem na retina permite a fuso de imagens intermitentes (GUYTON & HALL, 2006). A percepo das imagens no instantnea. necessrio um perodo de latncia relativo cada cor para que a imagem seja captada. Porm esse perodo aproximadamente compensado pela reteno retinal
(PEDROSA, 2009) O tempo de persistncia da imagem na retina de aproximadamente 1/10 segundo (GAIOSKI, LEHMKUHL, & COSTA, 2007). Assim, se as excitaes sobre a retina forem feitas com intervalos menores cada impresso ainda encontra a anterior, qual se pode ligar, dando-nos uma idia de continuidade.
12
2.2.
FENMENO PHI
Se dois estmulos so expostos aos olhos em diferentes posies, um aps o outro e com pequenos intervalos de tempo, os observadores percebem um nico estmulo que se move da posio primeira segunda (MACHADO, 2007). A este fenmeno foi dado o nome de Phi, e trata-se, segundo seu descobridor Wertheimer (1912), de um fenmeno psquico (e no ptico ou fisiolgico). Para que a interpretao do movimento ocorra necessrio um intervalo de mascaramento, como ocorre nos cinemas (AUMONT, 2004). Entre uma imagem e outra: o obturador bloqueia a luz, gerando um efeito de mascaramento. Na televiso, pode-se obter o mesmo efeito entrelaando as linhas horizontais pares e as linhas horizontais mpares (ROSS, 2007). O fenmeno Phi responsvel pela sntese do movimento numa sequncia de imagens exibidas intermitentemente.
2.3 LED
Para melhor entender o funcionamento do globo de LEDs deve-se destacar alguns conceitos importantes como a sua definio. LED a sigla que vem do ingls Light Emitting Diode que significa Diodo Emissor de Luz. O LED um diodo semicondutor, constitudo por um chip o qual possui uma ponta metlica com um cristal ou resina epxi de semicondutor e no qual existe uma juno P-N, este quando energizado emite luz. O primeiro LED foi fabricado, em 1962, na fbrica da General Electric pelo engenheiro Nick Holoniak Jr. Estes eram de cor nica, o vermelho. Alguns anos depois surgem os LEDs das cores verde e amarelo. Em 1993 surgiu o primeiro LED de cor azul vivel comercialmente. Graas a essa descoberta o pesquisador japons Shuji Nakamura pode criar o LED de luz branca, que nada mais que o LED azul com uma camada de fsforo. Esse material, em cima do
13
semicondutor, converte a luz ultravioleta em luz branca, como ocorre na fluorescente. A luz emitida pelo LED no monocromtica como em um laser, mas, consiste de uma banda espectral de comprimento de onda simples, a qual produzida por interaes energticas dos eltrons. A emisso de luz atravs da aplicao de uma fonte eltrica de energia conhecida como
eletroluminescncia. O brilho do LED ocorre atravs de uma recombinao de lacunas e eltrons, que ocorre na juno P-N polarizada diretamente, a qual exige que a energia possuda por esses eltrons seja liberada na forma de calor ou ftons de energia. O comprimento da onda, ou seja, a cor do feixe depende do material formado pela juno P-N que o material usado para fazer o chip do LED. O LED possui muitas vantagens em relao a outras fontes de luz, como por exemplo: So dispositivos muito mais slidos e potentes, o que faz com que
no sejam suscetveis as vibraes; Se usados de forma correta podem ter uma vida til de 50.000 a
100.000 horas; Por seu pequeno tamanho consomem pouca carga e
consequentemente utilizam pouca energia; Operam em baixa tenso; Convertem aproximadamente 40% de energia eltrica em luz, ao
contrrio das luzes incandescentes que convertem apenas 5%.
14
3 METODOLOGIA
O projeto consiste na construo de um aparato que, baseado nos princpios de persistncia da viso e do fenmeno phi, ir gerar imagens atravs da rotao de um arco impregnado de LEDs. Tais LEDs foram programados para acender ou apagar a cada posio que assumir em uma rotao do arco. Essa programao para acendimento foi feita utilizando um microcontrolador PIC 18F4620. Para melhor aproveitamento do tempo, o projeto foi desenvolvido em duas etapas principais: etapa mecnica e etapa eletrnica. A seguir, descrevemos em detalhes o desenvolvimento de cada etapa do projeto.
3.1
PROJETO MECNICO
A estrutura mecnica do projeto se baseou em algumas ideias vistas no prprio Youtube, onde em alguns casos havia o suporte fixo em bancadas, e outros que at mesmo foram criados a partir de ventiladores. Sendo assim, a estrutura mecnica atual composta por quatro fatores conjuntos fundamentais, que so: O trip de apoio e o arco de sustentao; O anel de rotao; O motor; Os rolamentos e o contato de alimentao.
3.1.1 Anel de Rotao
A maioria dos projetos encontrados na internet utiliza a disposio dos LEDs em uma circunferncia. A explicao para isso simples: a partir dessa
15
configurao possvel obter a imagem contida em uma esfera, o que possibilita a formao de textos em perspectiva, assim como a projeo do mapa-mundi (imagem mais popular dos globos PDV da internet). O anel de rotao do projeto, que foi improvisado de uma tampa metlica de lixo, tem 22cm de dimetro, 1mm de espessura e 1,5cm de largura, constituindo uma adaptao mecnica importante para a disposio dos LEDs.
3.1.2 Preparao Mecnica para Alimentao
Diferentes dos outros itens anteriores que foram inspirados em projetos j criados, a alimentao de tenso da placa foi feita de uma maneira diferente, no utilizando nenhuma bateria. Partindo do fato de que o anel de rotao precisaria de um eixo para rodar, e que este seria o mesmo eixo onde a placa seria fixa, fez-se a alimentao em dois contatos (VCC e GND) do prprio eixo, conforme a figura 1.
Figura 1 - Eixo principal.
16
Para que houvesse o contato do fio, inicialmente foi utilizada a prpria palha de ao domstica, depois substituda por escovas de carrinhos de autorama, uma ideia apresentada pelo professor orientador do projeto.
3.1.3 Rolamentos
Os rolamentos foram uma soluo encontrada para que houvesse o menor atrito possvel na rotao do anel juntamente com a placa e os LEDs.
3.1.4 Motor
O motor foi o ltimo item a ser includo no projeto mecnico pois a sua condio de funcionamento dependia criticamente da massa do conjunto mecnico (eixo de rotao, placa do circuito, fios e LEDs), que juntos pesavam aproximadamente 250g. Na busca por motores pequenos e baratos que mantivessem um torque superior ao peso do conjunto mecnico, foram encontradas muitas
configuraes de motores em que o torque inicial era muito grande (at 1 kg), mas que quando em regime permanente de operao era muito baixo (aproximadamente 150g). Esse problema ocorreu at acharmos o motor que mantinha 200g de torque, o que foi suficiente para cobrir a frequncia mnima para o efeito de persistncia da viso e manter o arco girando com toda a sua massa embutida.
3.1.5 Prottipo
A figura 2 mostra o prottipo da parte mecnica do aparato.
17
Figura 2 - Prottipo do aparato.
3.2
PROJETO ELETRNICO
3.2.1 Hardware
3.2.1.1
Transformador e Diagrama Esquemtico da Fonte de Alimentao
Nesse projeto utilizou-se um transformador de tenso de rede para uma tenso nominal de 0-9V e 0-22V. Esta tenso foi posteriormente retificada com pontes retificadoras de 0,5A e filtrada com dois capacitores eletrolticos de
18
tenses mximas diferentes. O motivo de uma ponte para a placa e outra para o motor deveu-se necessidade de duas tenses diferentes. Depois de filtradas (pelos capacitores), as tenses, agora contnuas, passaram por dois reguladores de tenso, 7805 e 7824. Do primeiro tem-se a sada para a alimentao da placa; do segundo, com a regulagem de tenso usando um potencimetro e um transistor NPN, TIP122, utilizado para ganho de corrente (que entra na base e amplificada na sada coletora, observandose a relao de temperatura com o ganho na tenso e o efeito dissipativo nesta) para o motor (contnuo, at 24V, aproximadamente 18999 RPM, torque 200g). Na figura 3 apresentado o diagrama esquemtico deste sistema:
Figura 3 - Diagrama esquemtico do transformador e pontes retificadoras usadas.
Durante as pesquisas para a realizao do trabalho a velocidade de giro do motor foi levada em considerao, de forma que se utilizou de um potencimetro para que a regulao da alimentao deste fosse simples diante das tentativas de visualizao das imagens. Os reguladores de tenso foram utilizados para as tenses mximas que seriam usadas, o potencimetro serviu portanto para tornar a regulao ajustvel, a utilizao da famlia de circuitos integrados LM, em implementaes futuras ser digna de estudo.
19
3.2.1.2
Sensor tico de sincronizao
A sincronizao feita com base na composio de um par emissorreceptor infravermelho e utilizado para que a temporizao dos LEDs independa das variaes de velocidade do motor. Trata-se basicamente de um sistema de realimentao. O funcionamento simples: o diodo infravermelho emissor fica preso base metlica e o receptor gira com o arco de LEDs. A cada volta completa captura-se o sinal do emissor, e dessa forma, sabemos exatamente o momento de uma volta. Esse valor anotado pelo MCU PIC 18F4620 e a temporizao ento regulada, ou no, caso no tenha variado o tempo da volta. A figura 4 mostra esquematicamente o emissor e o receptor.
Figura 4 - Sensor de sincronismo: Emissor e Receptor Infravermelho.
3.2.1.3
Microcontrolador
20
Microcontroladores so dispositivos compostos por memria, CPU, unidade de transferncia de dados, temporizadores e unidade de comunicao (serial, paralelo). No projeto utilizou-se a MCU PIC 18F184620.
MCU PIC
A arquitetura dos microcontroladores PIC do tipo Harvard e RISC. Assim, so computadores com um conjunto reduzido de instrues (Reduced Instruction Set Computer) em que a memria de dados (EEPROM e RAM) separada da memria de programa (FLASH), o que possibilita um maior fluxo de dados atravs da CPU, ou seja, maior velocidade de execuo. Alm disso, essa separao faz com que as instrues possam ser representadas em mais de 8 bits. Os PICs possuem em geral caractersticas bsicas fundamentais: temporizador, watchdog, memria flash e memria no voltil: Temporizador: contador de 8 bits, funciona independentemente
da execuo do programa. No final da execuo de 4 ciclos de clock do oscilador, o temporizador incrementa um valor (at 255). Como se sabe o tempo exato entre os intervalos desse incremento, pode-se calcular o tempo entre dois instantes. Watchdog: quando o temporizador trava, um contador ser
incrementado, e ao atingir um valor limite, o watchdog zera o contador e fora o RESET do microcontrolador. Memria Flash: memria de programa. Pode ser apagada e
reescrita. Memria EEPROM: mantida mesmo sem a alimentao. Ser til
para manuteno de dados fixos, como velocidade do motor, etc. Memria RAM: memria utilizada durante a execuo,
temporria.
21
PIC 18F4620
As principais caractersticas do PIC 18F4620 utilizado no projeto so:
Memria Memria Flash: 64 KBytes; RAM de 3,968 Bytes; EEPROM de 1 KByte;
CPU Aproximadamente 10 MIPS; Compilador C para arquitetura RISC; Instrues podem ser acessadas em ciclos nicos; Trabalho com data, timer e A/D interrupts;
Sistema Oscilador interno de 31kHz at 8MHz, e alcanando at mais de 40MHz com a utilizao do PLL (Phase Lock Loop, um multiplicador de frequncia); Monitor Fail-Safe, que permite operar em baixa velocidade e o desligamento da aplicao; Watchdog Timer com oscilador independente RC; Tenses de alimentao abrangidas de 4,2 at 5V; Modos de baixo consumo de energia Execuo, espera e ocioso, cada um rodando com uma tenso especfica.
Sistema de converso A/D (Conversor analgico para digital) Caractersticas de converso de input analgico em 13 canais para digital de 10 bits. Na figura 5, mostra-se o circuito usado no projeto.
22
Figura 5 Circuito do projeto utilizando o PIC 18F4620.
3.2.1.4
Desenvolvimento
O desenvolvimento do software exigiu conhecimentos sobre o uso da principal IDE da Microchip, bem como de programao em C ambientada com os compiladores e especfica para o 18F4620. Foram utilizados os temporizadores internos e o PLL foi utilizado para obteno de maior clock.
MPLAB v8.56
O MPLAB v8.56 a ferramenta principal de desenvolvimento de software para MCU PIC. Ela possibilita a programao e o debug do software
23
em um ambiente grfico. Neste projeto o MPLAB foi utilizado somente para a gravao do programa no PIC.
HighTech Pro v9.63 Trial e CSS
O MCU funciona como um computador, em cdigo de mquina. Portanto ao desenvolver o software foram utilizados - alm dos compiladores indicados pela fabricante da MCU - a IDE (MPLAB v8.56) e os compiladores HighTech e CCS que proporcionaram maiores praticidades como a utilizao dos assistentes de configurao para PICs. Utilizamos a verso temporria do compilador Hightech e uma verso registrada do compilador CCS.
ICD2 e ICD2 BR
O ICD2, assim como PicKit2, um kit prtico para o uso do MCU. Trata-se de um dispositivo que faz a comunicao do MCU com o ambiente de desenvolvimento, sua tarefa principal gravar o programa desenvolvido pelas IDEs no MCU (conhecido tambm como burner em fruns online). A figura 6 mostra o ICD2.
24
Figura 6 - ICD2.
Em determinado momento utilizamos o ICD2 BR, que apresenta igual funcionamento e compatibilidade. Essa troca foi feita devido indisponibilidade de emprstimo do ICD2. A verso a qual tivemos acesso incompatvel com sistema operacional de 64bits, para programao, portanto utilzou-se de uma mquina virtual (VirtualBox 3.2.10 da Oracle). O ICD2 integrado ao MPLAB v8.56 possibilita a transferncia do arquivo .hex ao MCU.
3.2.2 Software
25
3.2.2.1
Programao do PIC 18F
Antes de comear o projeto efetivamente, buscou-se a maior quantidade de referncias possveis, das quais a mais importante delas foi o trabalho de um russo chamado Csaba Bleuer (BLEUER, 2010) e o de seu amigo _riko_81 (como era conhecido em comunidades online) (ELETRNICA, 2009), que em suma possuam os projetos melhor elaborados e documentados (apesar de estarem no idioma russo). No material fornecido pelos autores, incluiu-se o software, o conversor de imagens para cdigo ASCII e tambm um esquema eltrico do hardware. Mesmo com um projeto pronto em mos, em virtude da grande diferena de conceitos e de disponibilidade de tempo, materiais e idioma, pouco pde ser reutilizado para a efetivao desse trabalho. Em seu projeto, Csaba Bleuer (BLEUER, 2010) utilizou um microcontrolador ATMEGA8, que um componente indisponvel pronta entrega em Curitiba. Assim, observando que nas lojas de eletrnicos de Curitiba havia certa quantidade e variedade de microcontroladores Microchip, optou-se pelo PIC18F4620 de 40 pinos. Suas configuraes satisfazem as necessidades dos projetos utilizados como inspirao, como por exemplo, a memria (3,968k) e a frequncia do clock (cerca de 40MHz). Com o microcontrolador em mos, identificou-se uma enorme diferena de conceitos no quais os dois projetos estavam inseridos (entre a arquitetura PIC e ATMEL). Csaba Bleuer (BLEUER, 2010) utilizou em seu projeto 64 leds, nmero muito superior quantidade de portas que o ATMEGA8 oferecia, para tanto, complementarmente adicionou ao seu projeto 4 expansores de porta SPI de 16 bits, que tinham como funo principal aumentar a quantidade de pinos do ATMEGA. Tentando simplificar ao mximo esse conceito, resolveu-se aproveitar as portas disponveis de um nico microcontrolador, por isso, o PIC18F4620 de 40 pinos foi uma escolha suficiente. Dentre os pinos disponveis, 4 eram de alimentao, 2 VCCs(5V), 2 GNDs (reset), 2 foram destinados ao cristal de oscilao, um pino reservado ao Master Clear e um ao sensor de ciclo, restando ento 32 portas para colocarmos 32 LEDs para a
26
exibio da imagem. Embora a quantidade de LEDs neste projeto seja a metade da encontrada no projeto de Csaba Bleuer, ainda conseguiu-se uma boa resoluo de imagem, como previsto com base em outros projetos encontrados na internet. Para o desenvolvimento do software do projeto, foi utilizando o compilador CCS v.4.068 (CCS Inc, 2010), em virtude de seu grande uso no mercado para solues que aplicam microcontroladores em sistemas embarcados Assim como qualquer processo intelectual que envolve etapas de construo, comear um novo projeto nesse compilador envolve alguns passos bsicos que so listados em uma tela de configurao, como na figura 7.
Figura 7 Assistente de configurao do PIC fornecido pelo CCS.
Essa tela de interface com o usurio permite definir as configuraes especficas de cada microcontrolador, que outrora em verses anteriores do compilador eram inseridas diretamente no cdigo fonte do programa.
27
Essa tela resume algumas propriedades estabelecidas na ficha de dados (do datasheet) de cada microcontrolador. Nela existem vrias opes de configurao de funcionamento que listam desde a possibilidade de utilizar o componente em um modo de trabalho master-slave, at quais portas utilizar para se ligar um display LCD, por exemplo. A execuo do programa pela MCU exige os seguintes procedimentos: 1) Desenvolvimento do cdigo. No nosso caso, ambientada
principalmente na IDE CSS. Um arquivo .c gerado; 2) Compila-se o arquivo, gerando um arquivo .hex; 3) Cria-se o projeto no MPLAB v8.56, importam-se os arquivos .hex e .c; a. Dentro do MPLAB v8.56 muda-se o modo para
Programming, com o ICD2 devidamente selecionado. b. Faz-se a gravao dos dados na MCU (Program). Durante esse processo identificaram-se alguns problemas como mais comuns (eles esto mencionados juntamente com as solues na seo 3.3).
3.2.2.2
Caractersticas da Programao do Software
No escopo do objetivo do projeto, importante destacar os itens: General; Timer; Interrupts; I/O Pins; IntR Oscillator Config.
No item General so configuradas as principais propriedades do projeto, como o tipo de microcontrolador utilizado, a frequncia de trabalho (clock), alm de algumas propriedades especficas citadas com maior nfase na seo 3.2.1.
28
Na seo Timer, escolhe-se qual dos trs temporizadores utilizar, definindo o seu tempo de resoluo de contagem e o tempo em que ir ocorrer o estouro (overflow). Exemplo de cdigo: setup_timer_2(T2_DIV_BY,4,1); Como uma seo complementar, a seo de interrupes cria mtodos fora da rotina principal que identificam quando converso analgico-digital, overflow de temporizadores, queda de tenso, entre outros, acontece em algum momento no microcontrolador. No projeto, o timer 2 foi utilizado em uma resoluo de 1.0 S e com um overflow de 10.0 S. Exemplo de cdigo: enable_interrupts(INT_TIMER2); I/O Pins determina se os pinos utilizados sero de entrada ou de sada (de dados ou de tenso analgica ADC). Nesse campo, a nica porta que foi definida como entrada foi o sensor de ciclo (sincronizador), todas as outras portas destinadas aos LEDs, foram definidas como sadas. E finalmente IntR Oscillator Config, que habilita as propriedades de oscilador interno do microcontrolador. Contornando o problema do nmero limitado de portas, optou-se por utilizar a configurao de oscilador interno para eliminar a necessidade de se utilizar o cristal externo de oscilao. A sua configurao inicialmente foi de 8MHz, que posteriormente foi ampliada a 32MHz com a utilizao do PLL multiplicador. Exemplo de cdigo: setup_oscillator(OSC_8MHZ|OSC_NORMAL|OSC_31250|OSC_PLL_ON);
3.2.2.3
Algoritmo
Aps definir todas as configuraes necessrias do microcontrolador, no algoritmo primeiramente feita a verificao do funcionamento de todos os LEDs ligando-os e desligando-os em pequenos intervalos de tempo. Depois disso, espera-se um tempo de 3s (obtido empiricamente) para que o motor esteja com sua velocidade mxima estvel.
29
Na sequncia, com o intuito de obter a velocidade de rotao, colhida a medida de tempo de uma volta completa do arco atravs da contagem do temporizador dois. Utilizando esse dado, juntamente com a informao do raio da circunferncia, possvel definir qual a velocidade de rotao do arco, e consequentemente qual ser o tempo em que cada coluna dever ser acesa. A quantidade de colunas foi calculada atravs do raio da circunferncia que era de 110 mm e do dimetro dos LEDs utilizados que era igual 3mm. Logo, o nmero de colunas foi:
2 110 3 230
Depois de obter essa informao, comeou-se a enviar os dados que sero mostrados no globo. Baseados nas observaes dos inmeros projetos nas comunidades de eletrnica ((BLEUER, 2010), (BOTRONICS, 2007), (CHETNIC, 2010), (EDORKI, 2008),
(ELETRNICA, 2009),
(PLEDIAYANO, 2009))
percebeu-se que a forma mais utilizada de se trabalhar com os dados que deveriam ser visualizados era a sua converso de formatos de imagem para cdigo ASCII. Utilizando o software IMAGE TO ASCII CONVERTER 1.1, de Peter Bone, como mostra a figura 8, realizamos a converso de algumas imagens, com a cautela de mant-las com uma altura de no mximo 32 linhas e de 200 colunas.
Figura 8 - Image to ASCII Converter 1.1.
30
Dentro de um menu configurvel do ASCII Converter foi possvel determinar os caracteres que seriam utilizados para a converso. Nesse ponto do projeto houve uma importante mudana conceitual. Csaba Bleuer (BLEUER, 2010) em seu projeto primeiramente convertia a imagem para cdigo ASCII e depois transformava esses dados em uma matriz de bytes. Dentro do cdigo principal do Atmel, Csaba Bleuer, utilizou-se da biblioteca pgmspace.h, criada por Marek Michalkiewicz (MICHALKIEWICZ, 2010), que efetivamente lia a informao octal da matriz ASCII, e enviava o sinal para os expansores de porta, cada um com autonomia para gerenciar o estado de 16 pinos. Diferente de Chetnic (CHETNIC, 2010), neste ponto optamos por trabalhar diretamente com os valores da matriz, transformando-a em uma enorme matriz binria e estipulando para cada pixel um valor de estado booleano (1 ou 0 ), o que identificaria o estado ligado ou desligado do LED. A figura 9 ilustra o estado final de uma imagem que inicialmente estava em JPEG, e foi transformada em uma matriz binria:
31
Figura 9 - Resultado da converso da imagem JPEG para a matriz binria.
Depois de definir propriamente a forma dos dados da imagem a ser projetada, o software ficou com uma estrutura relativamente simples. A cada pulso que o sensor realiza ao completar uma volta so executados dois laos. O mais externo identifica qual coluna est sendo lida, e o interno atualiza os dados de cada elemento da coluna, linha por linha. Toda a questo do incremento dos dois laos ocorre depois que houve o impulso do sensor indicando sincronismo - como uma marca de referncia para o incio da transmisso de sinal. O status da porta deve-se ao valor que lido da matriz, como se pode observar na figura abaixo, se o valor lido 1 a porta est ligada, caso contrrio est desligada. O ndice de cada LED avaliado pela linha que est sendo analisada. Caso se encontre entre a primeira e a oitava linha, representa a porta A, isso se repete sequencialmente at chegar porta D, a ltima.
32
Figura 10 - Estrutura do algoritmo
3.2.3 Problemas Encontrados
3.2.3.1
Gerais
O problema mais pontual na equipe foi a dificuldade em encontrar um horrio comum de trabalho, pois todos trabalham fora da Universidade. O tempo de aula foi importante para poder adiantar diversos aspectos que por vezes se encontravam atrasados, ora trabalhou-se em sala, ora foi usado para reunio externa, de forma a se encaixar em um cronograma ideal.
3.2.3.2
Estrutura Mecnica
A estrutura mecnica inicialmente no apresentou nenhum problema em virtude de ser composta apenas por um trip metlico e o seu arco, que a princpio era uma seco de um cano PVC de aproximadamente 200 mm de dimetro. O problema realmente comeou quando o motor comeou a girar o
33
arco, pois este veio a romper com a sua deformao estrutural (achatamento na zona equatorial), o que quase causou um acidente com um dos membros da equipe. Aps essa experincia, o arco foi substitudo de forma estratgica por uma adaptao feita a uma tampa metlica de lixo, mais resistente ao achatamento e disposio de novos furos para insero de LEDs. Outro problema de importante destaque foi a fixao do motor. Inicialmente, o motor era preso bilateralmente, ou seja, no tinha folga de movimento, o que causava superaquecimento. A soluo encontrada foi prender apenas uma extremidade, o que o deixou mais livre seu movimento, reduzindo o problema.
3.2.3.3
Hardware
O hardware apresentou um problema que era em parte esperado, mas necessitou de confirmao emprica. Utilizaram-se inicialmente todos os LEDs compartilhando o mesmo resistor de anodo. Por inferir que o brilho dos resistores seria igual em virtude de piscarem em um intervalo de tempo muito pequeno, resolveu-se testar essa configurao. Falhou, colocou-se, portanto, um resistor para cada LED, assegurando o fluxo de corrente e seu brilho.
3.2.3.4
Integrao
Um problema que pode ser considerado tanto como da parte mecnica, quanto do hardware, foi a dificuldade em estabelecer os contatos eltricos de alimentao. Inicialmente tentou-se utilizar at esponjas de ao, que funcionava, mas sofria desgaste rapidamente. Esse aparato acabou sendo substitudo por contatos de autorama, pois apresentavam melhor desempenho e durabilidade e assim melhoraram a rotao do globo. Outro ponto peculiar que pode ser destacado foi a utilizao do sensor e a dificuldade de posicion-lo em frente ao emissor infravermelho, depois de
34
vrias tentativas, a posio ideal foi encontrada ao deixar o receptor levemente inclinado em relao ao emissor (isso se deve ao pequeno ngulo de recepo, +-20 graus para modelos de 3mm).
3.2.3.5
Software
O software apresentou vrios problemas desde o incio. Embora suas resolues tenham sido encontradas, uma teve destaque: a configurao do clock. Inicialmente foi utilizado um clock interno de 8MHz, o que no era suficiente para atualizar os dados nas colunas a cada incremento do lao. Com o intuito de contornar esse problema definiu-se o clock utilizando um cristal externo de oscilao com o multiplicador ativado (PLL 4X), essa configurao ficou muito suscetvel trepidao, o que parecia at mesmo um rudo eltrico. Ao analisar melhor o oscilador interno, descobriu-se que nessa configurao tambm existia a possibilidade de utilizar o multiplicador PLL para elevar o clock interno (anteriormente elevava-se o clock do oscilador externo) de 8MHz para 32 MHz, o que acabou sendo mais do que suficiente para a atualizao dos dados da imagem.
35
4 TRABALHOS FUTUROS
Como sugesto de trabalhos futuros, importante destacar o desenvolvimento de um Globo de LEDs com maior resoluo na imagem gerada e imagem colorida, um globo feito com LEDs RGB. Outro projeto plausvel fazer um globo que possua interao com o usurio atravs de botes, por exemplo, um jogo de ttris. Um trabalho bem interessante tambm foi proposto pela professora Neysa Regattieri, membro do Departamento de Fsica da UTFPR Curitiba, que consistiria em fazer um prottipo de um olho para mostrar como se d a formao da imagem gerada pelo globo no crebro humano, ou seja, como a pessoa interpreta essa imagem. Vale citar tambm a idia de projetar no globo a imagem captada de uma cmera.
36
5 CONCLUSO
O projeto atingiu as metas inicialmente traadas, alcanou um estado final, tornando possvel a constatao do fenmeno Phi e da persistncia da viso. Comprovou-se empiricamente com o aparato construdo que a velocidade de rotao dos LEDs nos dava a formao de uma imagem esttica, conforme o esperado e descrito no decorrer do projeto. Quanto ao fenmeno Phi, observou-se que o semiarco onde no havia LEDs fixados provocava o efeito de mascaramento necessrio para que interpretssemos a figura se movimentando. Conforme incitado na etapa de pr-projeto, percebeu-se enfim, a viabilidade comercial do produto de trabalho, tendo em vista que o resultado alcanado apresentou custo mais baixo do que o esperado. Tratando-se de comercializao, as melhorias tecnolgicas so benficas quanto ao
desempenho e impacto visual do produto, diante de circuitos menores, melhor resoluo de imagem, display colorido e com diversas programaes e com interao com o usurio, etc. Dessa forma, aps a realizao desta documentao e da construo do produto, possvel caracterizar este esforo como uma etapa vlida para o aprendizado e a aplicao de conhecimentos alm dos vistos at o momento nos cursos da ementa acadmica. Assim, o resultado obtido no somente um produto de trabalho, mas um instrumento de estudo aos discentes, reforado pelas solues para a resoluo dos problemas encontrados.
37
REFERNCIAS
AUMONT, J. (2004). A imagem. Campinas: Papirus.
BLEUER, C. (2010). Rotating LED Globe. Acesso em Setembro de 2010, disponvel em Hacked GadGets: http://hackedgadgets.com/2010/05/03/rotatingled-globe/
BOTRONICS (Diretor). (2007). 3D Orbs at Makers Fairs 07 [Filme Cinematogrfico].
CCS INC. (June de 2010). C Compiler Reference Manual. Acesso em Outubro de 2010, disponvel em Custom Computer Inc.:
http://www.ccsinfo.com/downloads/CReferenceManual.pdf
CHETNIC (Diretor). (2010). LED Globe Project [Filme Cinematogrfico].
EDORKI (Diretor). (2008). LED Globe At Maraikan [Filme Cinematogrfico].
ELETRNICA, F. R. (24 de Dezembro de 2009). 3D LED Globe. Acesso em Setembro de 2010, disponvel em Easy Electronics:
http://easyelectronics.ru/3d-led-globus.html
38
EVERLIGHT.
(s.d.).
Acesso
em
Outubro
de
2010,
disponvel
em
http://www.vtm.co.uk/PDF/Everlight/IR204.pdf
GAIOSKI, E. R., LEHMKUHL, G. S., & COSTA, R. K. (2007). Dispositivo luminoso com colunas giratrias de diodos emissores de luz. Curitiba, Paran: Universidade Federal do Paran.
GUYTON, A. C., & HALL, J. E. (2006). Tratado de fisiologia mdica. Elsevier Brasil.
MACHADO, A. (2007). Pr-cinemas & ps cinemas. Campinas: Papirus.
MESQUITA, D. C., & ALMEIDA, L. G. (2008). Um estudo sobre as tcnicas de computao grfica em animao de personagens. Belm.
MICHALKIEWICZ, M. (16 de Junho de 2010). Program Space Utilities. Acesso em Setembro de 2010, disponvel em AVR Libc: http://avrlibc.nongnu.org/user-manual/group__avr__pgmspace.html
MICROCHIP. (2009). Microcontrollers. Acesso em Setembro de 2010, disponvel em Microchip: http://www.microchip.com/
OLIVEIRA, F. G. (2009). Cruzamento entre a cultura visual, a iluso de movimento e animao. Gois.
39
PEDROSA, I. (2009). Da cor cor inexistente. Rio de Janeiro: Senac Nacional.
PLEDIAYANO
(Diretor).
(2009).
3D
LED
Display
Globe
si
[Filme
Cinematogrfico].
ROSS, J. (2007). Televiso analgica e digital. So Paulo: Antenna Edies Tcnicas.
SABA, M. M., & EPIPHANIO, I. D. (2001). Abrindo o olho: dissecando um olho de boi para entender a ptica do olho humano. Fsica na Escola .
Você também pode gostar
- Mapa PecémDocumento1 páginaMapa PecémwylltonmAinda não há avaliações
- Prova 072012Documento6 páginasProva 072012wylltonmAinda não há avaliações
- Fundamentos Da AdministraçãoDocumento23 páginasFundamentos Da AdministraçãowylltonmAinda não há avaliações
- Trabalho EconomiaDocumento7 páginasTrabalho EconomiawylltonmAinda não há avaliações
- Candidatos 2a Fase MecânicaDocumento45 páginasCandidatos 2a Fase MecânicaEvandro RaphaloskiAinda não há avaliações
- Aula 3 Arquiteturas Microcontroladores e Microprocessadores PDFDocumento24 páginasAula 3 Arquiteturas Microcontroladores e Microprocessadores PDFAllas JonyAinda não há avaliações
- Acessando e configurando OLT IntelbrasDocumento19 páginasAcessando e configurando OLT IntelbrasJilvan jilAinda não há avaliações
- Nastran Metodos Dos Elementos FinitosDocumento27 páginasNastran Metodos Dos Elementos FinitosronillmiguleAinda não há avaliações
- Ana Valecia Ribeiro e Cyrille BrissotDocumento15 páginasAna Valecia Ribeiro e Cyrille BrissotNaldogbiAinda não há avaliações
- Lista de peças - Vista explodida do trator 1030/1040/1050DDocumento258 páginasLista de peças - Vista explodida do trator 1030/1040/1050DPaulo NucciAinda não há avaliações
- Arduino Básico - Conceitos e aplicações do microcontrolador ATmegaDocumento42 páginasArduino Básico - Conceitos e aplicações do microcontrolador ATmegaMozart ÁvilaAinda não há avaliações
- Prova 06Documento9 páginasProva 06eleno ribeiroAinda não há avaliações
- Sistema de Administração de Concursos DSEADocumento1 páginaSistema de Administração de Concursos DSEAnantesAinda não há avaliações
- GuiaDeInstalação PolyWorks2016Documento24 páginasGuiaDeInstalação PolyWorks2016lukiAinda não há avaliações
- COMPILADOASIDocumento62 páginasCOMPILADOASILia VieiraAinda não há avaliações
- Equação SecularDocumento8 páginasEquação SecularfockewulAinda não há avaliações
- NR 01 - OrDEM SERVIÇO Chefe - de - EquipaDocumento1 páginaNR 01 - OrDEM SERVIÇO Chefe - de - EquipaCPSSTAinda não há avaliações
- Ficha 4 ExcelDocumento2 páginasFicha 4 ExcelBiaRosad0Ainda não há avaliações
- A Tic Tecnologia Da Informacao e Comunicacao Na EducacaoDocumento32 páginasA Tic Tecnologia Da Informacao e Comunicacao Na EducacaoEnio LucioAinda não há avaliações
- NGN Voice Study: History, Design & PolicyDocumento149 páginasNGN Voice Study: History, Design & PolicyYuyun ManiezAinda não há avaliações
- Relatório de Autoavaliação Institucional da Faculdade de Tecnologia ENIAC - FAPI 2014Documento124 páginasRelatório de Autoavaliação Institucional da Faculdade de Tecnologia ENIAC - FAPI 2014Claudio SantosAinda não há avaliações
- Cálculo Da Probabilidade em Eventos AleatóriosDocumento6 páginasCálculo Da Probabilidade em Eventos AleatóriossergioloisAinda não há avaliações
- Livro Automacao 2 EdDocumento18 páginasLivro Automacao 2 EdAtila DavidAinda não há avaliações
- Resumo de Aulas e ExercíciosDocumento21 páginasResumo de Aulas e ExercíciosLuiz Alexandre Araujo TobaseAinda não há avaliações
- Implantação de Sistema de Gerenciamento de Parque AquaticoDocumento25 páginasImplantação de Sistema de Gerenciamento de Parque AquaticoAcademicosTIAinda não há avaliações
- Franquias TelecelulaDocumento29 páginasFranquias TelecelulaRaul LimaAinda não há avaliações
- 05 - The Torid AffairDocumento204 páginas05 - The Torid AffairJadna Rodrigues100% (1)
- Fornecimento em tensão secundáriaDocumento113 páginasFornecimento em tensão secundáriaDiogo Feltrin100% (1)
- AP2 - Atividade Teórica de Aprendizagem 02 - 2022A - Fundamentos de Marketing (57725)Documento3 páginasAP2 - Atividade Teórica de Aprendizagem 02 - 2022A - Fundamentos de Marketing (57725)Hugo EstevesAinda não há avaliações
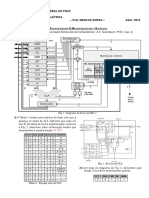
- Microcontroladores 2 Exercicios Macro e Microarquitetura v2Documento4 páginasMicrocontroladores 2 Exercicios Macro e Microarquitetura v2Marcelo LimaAinda não há avaliações
- Falhas FH4 FCIOMDocumento5 páginasFalhas FH4 FCIOMVINI100% (6)
- COM BT Gestao de Compras Publicas BR TDMLOKDocumento98 páginasCOM BT Gestao de Compras Publicas BR TDMLOKAnderson MachadoAinda não há avaliações
- Modelo 5W3HDocumento1 páginaModelo 5W3Hcarlos_contabeisAinda não há avaliações
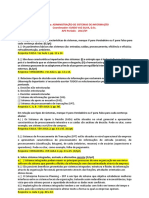
- Lista de Segurança Da Informação IIDocumento9 páginasLista de Segurança Da Informação IIKaneda ShotaroAinda não há avaliações